Femap_四面体单元网格质量
Distortion in Tetrahedral Elements
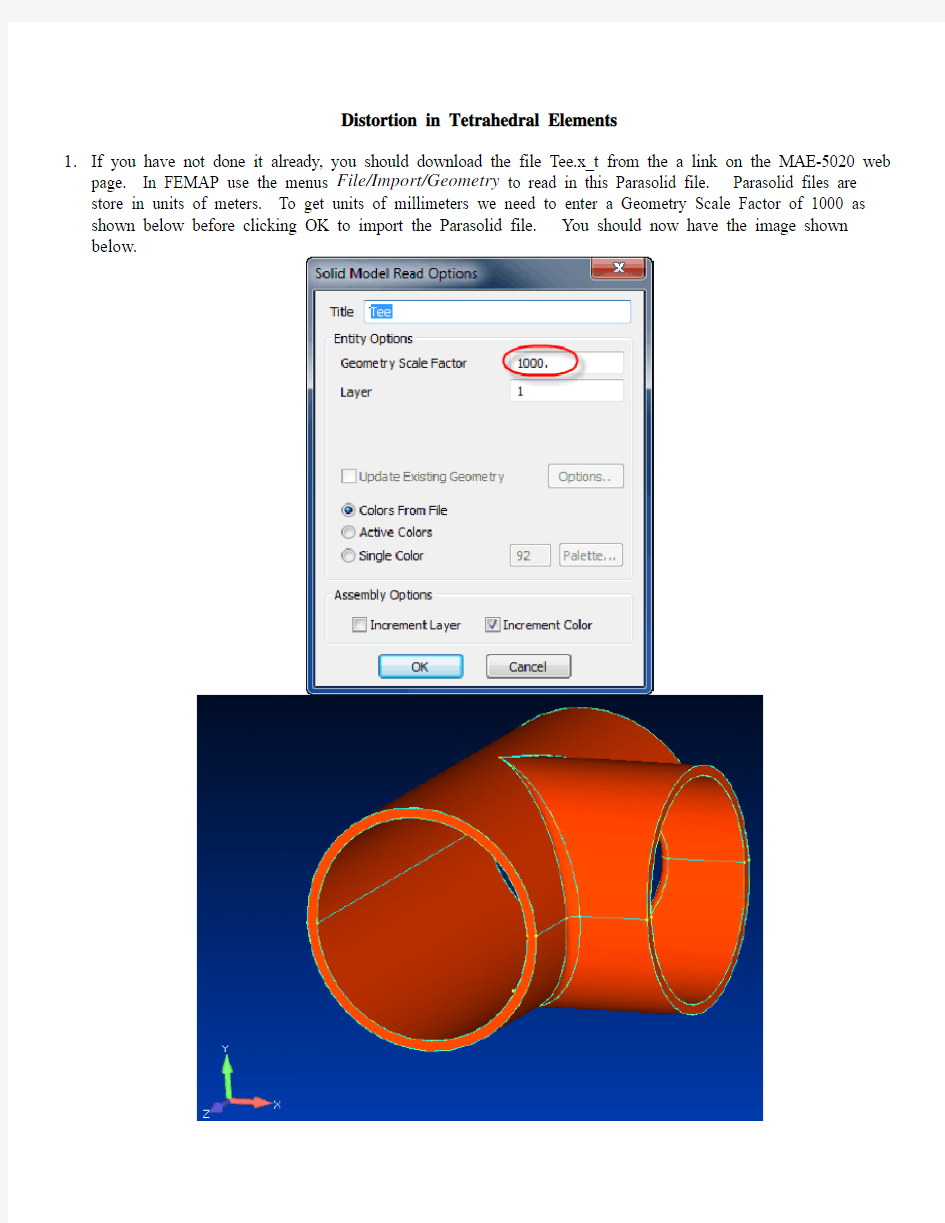
1.If you have not done it already, you should download the file Tee.x_t from the a link on the MAE-5020 web
page. In FEMAP use the menus File/Import/Geometry to read in this Parasolid file. Parasolid files are store in units of meters. To get units of millimeters we need to enter a Geometry Scale Factor of 1000 as shown below before clicking OK to import the Parasolid file. You should now have the image shown below.
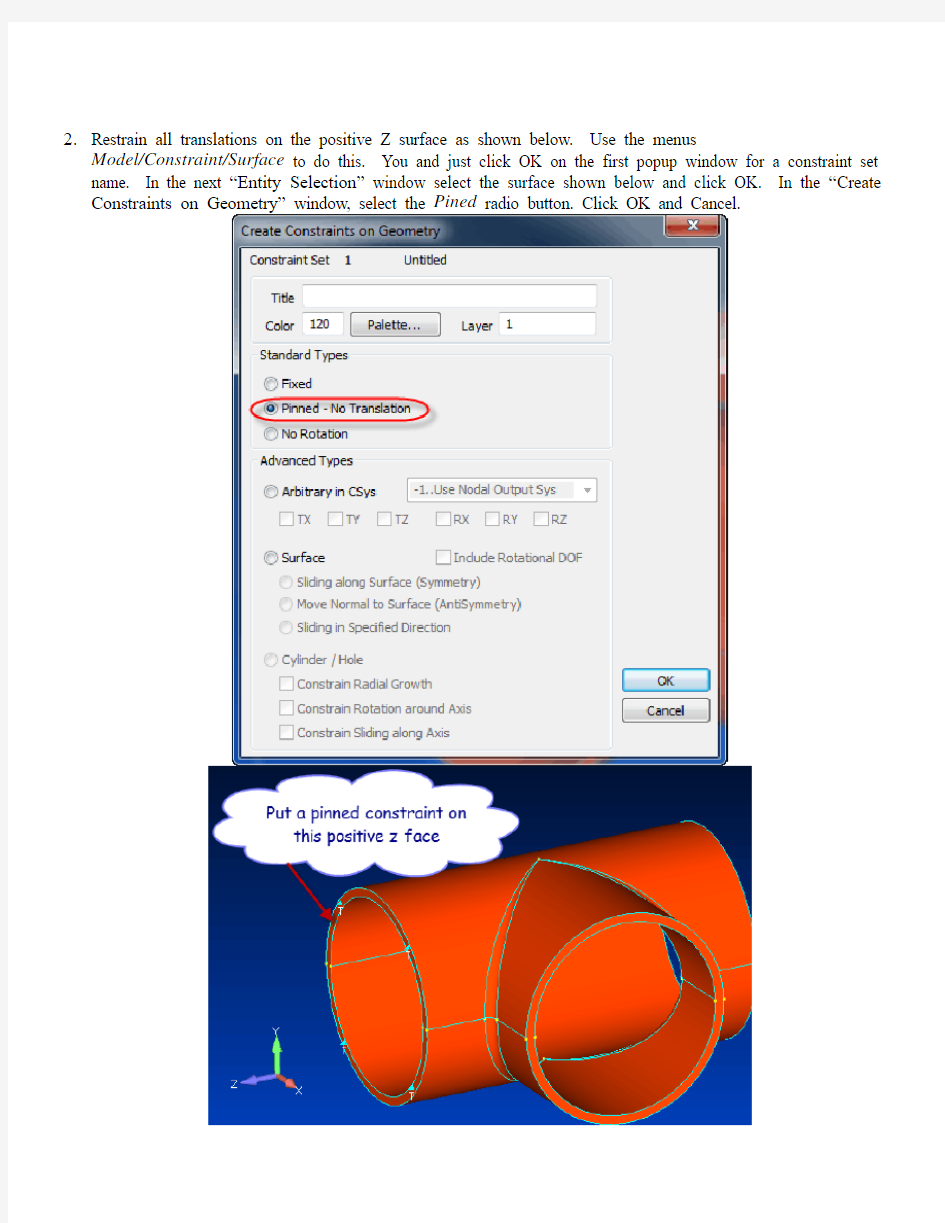
2.Restrain all translations on the positive Z surface as shown below. Use the menus
Model/Constraint/Surface to do this. You and just click OK on the first popup window for a constraint set name. In the next “Entity Selection” window select the surface shown below and click OK. In the “Create Constraints on Geometry” window, select the Pined radio button. Click OK and Cancel.
3.Apply a 1000 mN/mm2 pressure on the positive X surface as shown below. Use the menus
Model/Load/Surface, key in a Load Set name, select the surface and click OK, and in the popup window shown below, select Pressure and enter the pressure value. Click OK and Cancel.
4.We will next set the mesh control to make a coarse mesh. From the menus select Mesh/Mesh Control/Size
on Solids. Select the solid and click OK. In the popup window, make sure Tet Meshing is selected and key in an Element Size of 35. Click OK.
5.Next, mesh the part by using the menus Mesh/Geometry/Solids. Since we have yet to define a material, the
window below pops up. Key in the values shown which a representative for steel and click OK. In the Automesh Solids popup window you can just click OK using the default SOLID Property.
6.You should now have the mesh shown below. We will turn off the solid to more clearly see the mesh. An
easy way to do this is by clicking the icon. This toggles the geometry on and off.
7.Notice that the edges of each tetrahedral element are straight. This is the default approach used by FEMAP.
This overly coarse mesh does not well represent the geometry because of the straight edges. However, if
curved edges were used, it creates elements with much more distortion (sufficient that an analysis could
fail). Let’s examine the distortion in the elements in this model. Select from the menus
Tools/Check/Element Quality. In the first popup window, click the Select All button to select all the
elements and click OK. In the Check Element Distortions window, only select Aspect Ratio and Jacobian to be checked as shown below. This will make a list of elements with either Aspect ratios greater than 12 or
Jacobians greater than 0.85 to be displayed. We are also asking to create a group containing these elements.
Click OK. A small portion of the display in the Messages window is shown below.
Element Aspect Ratio Taper Alternate Taper Internal Angles Warping Nastran Warp Tet Collapse Jacobian Combined
405 2.17881 0.86823 418 2.32891 0.85428 453 12.6647 0.66574 479 12.014 0.66224
8.The following information is from FEMAP’s documentation:
“Valid elements prod uce Jacobian Distortion values between 0.0 and 1.0, where 0.0
represents the "ideally shaped" element. Severely distorted elements whose Jacobian
determinants are locally discontinuous or undefined are assigned a distortion value of 2. If
any of your elements have a Jacobian Value of "2", the element is not valid (i.e., the
element is inside out, twisted, etc.) and should be fixed before analysis.”
Thus, what FEMAP calls a Jacobian is not the same as the determinate of the Jacobian matrix as described in your text. However, per their guidelines, a 0 for distortion would be a perfectly shaped element and a 1.0 is on the outer limits of acceptance. If a value of 2.0 is obtained, the element is invalid! If you look through the message window, the worst distortion is 0.87346. Not a great element, but it will solve.
To look at the elements in the group that was created, go to the Model Info window as shown below and click on the + in front of Groups, then right click on the group named “Distorted Elements” a nd selective Activate. Right click again on the group name and select “Show Active Group.”
9.Your display will look something like the one below. If you rotate the model around, you will see the
elements are getting very flat. Automatic meshing of tetrahedral elements can produce “flat” elements (i.e.
they have very little volume).
10.To displa y all the model instead of these “bad” elements, right click on the group name again and select
“Show Full Model” as illustrated below.
11.Proceed with a normal static solution as you have done before. You should not get any error messages.
12.Click the icon and set the Contour parameter to Von Mises Stress and click OK. Click the and
icons to display the deformed stress results.
13.We will delete the results and the model. In the Model Info window, expand the Results + and right click on
the case and select Delete as shown below. In the next popup window, click the Go Fast button to delete the results.
14.Now from the menus select Delete/Model/Mesh. In the popup window click the Select All button. In the
next popup window it asks if you want to delete unused properties and materials. Click NO.
15. Because we turned off the geometry display, the screen looks funny. We need to turn the geometry back
on. An easy way to do this is by clicking the icon.
16.We will now mesh with more nodes. Select from the menus Mesh/Mesh Control/Size on Solid and select
the part and click OK. In the popup window enter an Element Size of 10 and click OK.
17.Next create a mesh on the part using the menus Mesh/Geometry/Solid. After making the mesh, your display
should look like the one below. Notice how the mesh now more closely follows the curved geometry.
18.Check the distortion in the elements again using the same parameters as used before. You will find that the
Jacobian values are reduced somewhat (0.873 to 0.786) but the aspect ratio has increased in some cases.
You will find these elements located in corners of the joints and some mesh refinement in those areas might further reduce the aspect ratios.
19.Look at the “worst” elements in the group we just created. In the Model Info window right click on the
second group name to “Activate” and then “Show Active Group.” You will find these elements located in corners of the joints and some mesh refinement in those areas might further reduce the aspect ratios.
20.Redisplay all the model by right clicking again on the second group name and selecting the “Show Full
Model” item again. Next, solve this model. Display the Von Mises stress contour on the undeformed
body . Turn off the geometry display by click the icon. Turn off the nodes using the icon.
When you have a fine mesh it helps to turn off the element edges. You can do this by holding down the left mouse button on the icon shown below and selecting the Filled Edges icon. Print this out and hand it in.
ICEM万能网格方法介绍
ICEM万能网格方法 众所周知,ICEM CFD以其强大的网格划分能力闻名于世,同其他类似网格划分软件一样,ICEM提供了结构网格和非结构网格划分功能。结构网格质量一般较高,有利于提高数值分析精度,但是对于过于复杂的几何体,其缺点也是显而易见的:需要耗费大量人力思考块的划分方式,且经常造成局部网格质量偏低的局面。而非结构网格因其快速、智能化划分方式获得了人们的青睐,但其网格形式一般呈四面体或三角形,不易于流动方向垂直,进而经常造成数值扩散。 那么有没有更好的网格划分方式,能够将结构网格和非结构网格的优点结合在一起,既能又快又好的生成网格、又提高计算精度呢?答案是肯定的。CFD资料专营店老板在研究所搞数值计算多年,对于网格划分更是非常熟悉,在这里总结了ICEM CFD中两种核心技术----六面体核心网格和混合网格技术的使用方法,这两种办法可以说适用于所有复杂几何体,是万能的!希望能够为因几何结构过于复杂、苦于无法做出较高质量结构网格、却又不想使用非结构网格的同仁们提供新的思路,帮你们打通网格难关! 一、六面体核心网格技术 ICEM CFD中有一种新技术,即六面体核心网格技术,其原理是首先生成四面体网格,然后通过先进算法,将大部分区域内的四面体网格破碎、整合成六面体网格,只有在几何非常复杂或者边缘地带才会保留四面体网格。这样生成的网格集合了四面体网格和六面体网格的优势,既节省时间;因为大部分区域是结构网格、完全可以与流
动方向垂直,因而能够保证计算精度。除此之外,六面体核心网格还能在四面体网格的基础上减少约60%-80%的网格数量,非常有利于充分利用计算机资源,加快计算时间。 效果如图所示: (图1)未使用六面体核心网格技术的网格截面 (图2)使用六面体核心网格技术后的网格截面
关于结构化网格和非结构网格的适用性问题
? 傲雪论坛 ? 『 Fluent 专版 』 打印话题 寄给朋友 作者 关于结构化网格和非结构网格的适用性问题 [精华] 翱翔蓝天 发帖: 22 积分: 0 雪币: 22 于 2005-07-23 22:58 有些前辈认为,数值计算中应采用结构化网格,如果非结构网格则计算结果将“惨不忍睹”。搞压气机计算的同行也认为,必须用结构化网格。然而, 对复杂的计算域,如果采用结构化网格必然造成网格质量的急剧下降,扭曲加大等问题。我觉得这时,不如采用非结构网格。诸位,请提出自己的意见 waterstone 我为人人,人人为我 发帖: 78 积分: 0 雪币: 78 于 2005-07-24 09:51 我是这样看的:非结构网格使用很方便,外型越复杂就越显示出其优越性;至于计算结果的精度,就要看 非结构网格在单元网格面、体积处理上方法是不是比结构网格要差。就fluent 软件,它是用体积积分法求 解雷诺平均方程的,在单元网格面、体积处理上方法好像是按非结构网格方法处理的。你就是按结构网格方法来生成网格,进入fluent 中,进行数值计算时都是按非结构网格来处理,所以在fluent 中,你用结构化网格方法生网格,和用非结构网格计算没多大区别!我说说我个人看法。 liuhuafei 于 2005-07-25 13:53
发帖: 872 积分: 6 雪币: 158 来自: 上海 waterstone wrote: 我是这样看的:非结构网格使用很方便,外型越复杂就越显示出其优越性;至于计算结果的 精度,就要看非结构网格在单元网格面、体积处理上方法是不是比结构网格要差。就fluent 软件,它是用体积积分法求解雷诺平均方程的,在单元网格面、体积处理上方法好像是按非 结构网格方法处理的。你就是按结构网格方法来生成网格,进入fluent 中,进行数值计算时都是按非结构网格来处理,所以在fluent 中,你用结构化网格方法生网格,和用非结构网格计算没多大区别!我说说我个人看法。 计算精度,主要在于网格的质量(正交性,长宽比等),并不决定于拓扑(是结构化还是非结构化)。 例如同样的2d 的10×10的正交网格,fluent 采用非结构化方式对网格编号,另一种软件按结构化网格处理,如果其它条件相同,二者的精度应该是一样的。 我们通常所说的非结构化网格,第一映象就是网格质量差,不正交的,编排无规律的网格的三角形网格或四面体网格,实际上一个二维区域的三角形网格,如果控制得好(如相邻控制 体中心的连线与公共边基本接近正交的话),其不结构化网格(网格正交性好)的精度是一致的 翱翔蓝天 发帖: 22 积分: 雪币: 22 于 2005-07-25 23:00 谢了,有收获,受益匪浅 edwardzhu 发帖: 60 积分: 1 于 2005-08-05 11:08 听楼上一席话,胜读一年书。
结构和非结构网格
CFD网格的分类,如果按照构成形式分,可以分为结构化和非结构化 结构化:只能有六面体一种网格单元,六面体顾名思义,也就是有六个面,但这里要区分一下六 面体和长方体。长方体(也就是所有边都是两两正交的六面体)是最理想完美的六面体网格。但如 果边边不是正交,一般就说网格单元有扭曲(skewed). 但绝大多数情况下,是不可能得到完全没有 扭曲的六面体网格的。一般用skewness来评估网格的质量,sknewness=V/(a*b*c). 这里V是网格 的体积,a,b,c是六面体长,宽和斜边。sknewness越接近1,网格质量就越好。很明显对于长 方体,sknewness=1. 那些扭曲很厉害的网格,sknewness很小。一般说如果所有网格sknewness>0.1也就可以了。结构化网格是有分区的。简单说就是每一个六面体单元是有它的坐标的,这些坐标用,分区号码(B),I,J,K四个数字代表的。区和区之间有数据交换。比如一个单元,它的属性是B=1, I=2,J=3,K=4。其实整个结构化单元的概念就是CFD计算从物理空间到计算空间mapping的概念。I,J,K可以认为是空间x,y,z在结构化网格结构中的变量。 非机构化:可以是多种形状,四面体(也就三角的形状),六面体,棱形。对任何网格,都是希 望网格单元越规则越好,比如六面体希望是长方形,对于四面体,高质量的四面体网格就是正四 面体。sknewness的概念这里同样适用,sknewness越小,网格形状相比正方形或者正四面体就越 扭曲。越接近1就越好。 很明显非结构化网格也可以是六面体,但非结构化六面体网格没有什么B,IJK的概念,他们就是充 满整个空间。 对于复杂形状,结构化网格比较难以生成。主要是生成时候要建立拓扑,拓扑是个外来词,英语 是topology,所以不要试图从字面上来理解它的意思。其实拓扑就是指一种有点和线组成的结构。工人建房子,需要先搭房粱,立房柱子,然后再砌砖头。拓扑其实就是房子的结构。这么理解拓 扑比较容易些,以后认识多了,就能彻底通了。 生成结构化网格的软件gridgen,icem等等都是需要你去建立拓扑,也就是结构,然后软件好根据 你的机构来建立网格,或者砌砖头,呵呵。 非结构化网格的生成相对简单,四面体网格基本就是简单的填充。非结构化六面体网格生成还有 些复杂的。但仍然比结构化的建立拓扑简单多。比如 gambit的非结构化六面体网格是建立在从一 个面到另外一个面扫描(sweep)的基础上的。Numeca公司的hexpress的非结构化六面体网格是用 的一种吸附的方法。反正你还是要花点功夫。 另外一点就是,结构化网格可以直接应与于各种非结构化网格的CFD软件,比如你在gridgen里 面生成了一个结构化网格,用fluent读入就可以了。fluent是非结构化网格CFD软件,它会忽略 那些结构化网格的结构信息(也就是B,I,J,K),当成简单的非结构网格读入。非结构化六面体网格 就不能用在结构化网格的CFD求解器了. 结构化网格仍然是CFD工程师的首选。非结构化六面体网格也还凑合,四面体网格我就不喜欢了。数量多,计算慢,后处理难看。简单说,如果非结构化即快又好,结构化网格早就被淘汰了。总 结一下,
icem-cfd 四面体网格模块tetra介绍
ICEM CFD四面体网格模块Tetra介绍
概述 T t z Tetra方法 z几何图形所要求的必备条件z Tetra处理综述 z示例实践 z ICEM CFD Prism介绍
Tetra方法,or... What the Heck is an Octree? ...at t e ec s a Oct ee? 网格尺寸信息已经在几何图形中规定了 z z潜在的网格填满限制框 z细分网格使其与几何图形一致 , ?divided in half in three dimensions , hence Octree z Cutter程序确定边界表面单元 z表面网格是体网格的结果 z光滑功能实现较好的单元质量
所有程序综述 z创建或读入几何图形 z将实体分配到几何图形数据库 z定义网格全局尺寸和在所选实体上的尺寸z产生网格 提高网格质量(光滑等) z提高网格质量(光滑,等) z输出到分析软件
Tetra的几何图形 z需要封闭的曲面模型 ?将曲面显示为实体 ?查找丢失的表面 ?查找洞或缺口 ?Tetra允许有较小的缺口(与当地单元尺寸比较)z关键特征处的点和曲线 z用材料点定义体 Missing inlet surface Missing inlet surface
点和曲线的使用 在尖角处包括点 z z包括曲线以限制节点能够放在关键特征处?在表面交叉处 ?at ‘kinks’ in surfaces z在曲面交接比较光滑处不要包括曲线 z NOTE: failing to include points and curves will result in mesh which is ‘chamfered’ at corners
icem一些总结精编版
CFD 第一章ICEM 总工作流程 ICEM CFD 的一般工作流程包括以下几个步骤: 1、打开或创建一个工程 2、创建或处理几何 3、创建网格 4、检查或编辑网格 5、生成求解器的导入文件 6、结果后处理 1.1创建或处理几何体 1.1.1导入几何题 利用三维软件进行三维建模。 Solidworks—另存为.igs文件—打开geometry—Import Geometry 打开.igs-保存文件—打开icem,打开文件。创建时,geometry与icem连接即可。 三维建模软件创建的几何文件都可以直接导入ICEM中。 1.1.2创建几何体 通过geometry功能栏可以完成创建于编辑几何体的操作。 (1)点的创建与编辑 打开第一个按钮即打开点的控制面板,通过该面板可以进行各类点的创建与操作。 (2)曲线的创建 (3)面的创建 (4)bodyde的创建 在给模型化网格之前,应该先确定该模型的计算域。确保该body在几何实
体内部。 (5)线和面的修改 (6)Repair实体 通常容差设置应该是预计划分的最小网格尺度的1/10,或者需要捕捉最小几何实体的特征尺度。 红线表示模型满足容差。黄线表示面的缺失或者面与面之间的缝隙大于容差,通常需要修补。 1.2网格的创建 1、四面体 2、六面体 3、棱柱网格等 1.2.1划分非结构化网格 提供了强大的划分四面体网格的功能。能将几何模型自动划分非结构化网格,适用于复杂的模型,并能在截得基础上适应网格。但也存在缺陷。 1.2.1.1自动划分网格方法 1、Octree算法 2、快速Delaunay阵面推进算法 3、前沿推进算法 1.2.1.2网格类型 1、四面体/混合网格
Hypermesh四面体网格划分
Hypermesh四面体网格划分 Hypermesh四面体网格划分 1.长按ctrl键后,左键,旋转,,中间键,缩放,,右键,移动, 放大后的图像按F字母键可以恢复原来的大小。 2.Entity:实体 3.实体划分网格后删除网格 4.Volume tetra: Tetra mesh:四面体网格 Volume tetra:直接四面体网格划分 Use Curvature:运用曲率,在有曲率的地方细化网格 Use proximity:在尺寸小的地方细化网格
5.Tetra mesh:四面体网格 先生成表面的网格,再由表面的网格扩展成体网格查看生成的表面网格, 按“F5键”出现以下界面 Shift+左键,选中一部分,选中的部分变白 按“mask”键,出现下图,
按“unmask all”恢复。 6.shift+F5: 7.F10键,检查窗口 Warpage:翘曲 aspect:长宽比 skew:扭曲 tet collapse,塌陷 Vol skew:空间扭曲 Min angle:最小角 Max angle:最大角 8.塌陷部分重新划分,即有缺陷的网格部分,,
F10---save failed,然后切换到F5键---elems,单元,---retrieve ,调出保存的图形,---reverse,选中合格的单元,---mask,隐藏,只剩下有缺陷的单元 Tool---find,工具框,---find attached---选中一部分---find键 3D---tetra remesh---elems,displayed,---remesh 9.快速网格划分,需自己设置参数,,
workbench网格划分的_很实用的讲解
ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。 1. 创建一个网格划分系统。 2. 创建一个变截面轴。 先把一个直径为20mm的圆拉伸30mm成为一个圆柱体 再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。对小圆柱的端面倒角2mm。 退出DM. 3.进入网格划分程序,并设定网格划分方法。 双击mesh进入到网格划分程序。 下面分别考察各种网格划分方法的特点。 (1)用扫掠网格划分。 对整个构件使用sweep方式划分网格。 结果失败。 该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。 (2)使用多域扫掠型网格划分。 结果如下 可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。这是最合适的网格划分方法。 (3)使用四面体网格划分方法。
使用四面体网格划分,且使用patch conforming算法。 可见,该方式得到的网格都是四面体网格。且在倒角处网格比较细密。 其内部单元如下图(这里剖开了一个截面) 使用四面体网格划分,但是使用patch independent算法。忽略细节。 、 网格划分结果如下图 此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。 (4)使用自动网格划分方法。 得到的结果如下图 该方法实际上是在四面体网格和扫掠网格之间自动切换。当能够扫掠时,就用扫掠网格划分;当不能用扫掠网格划分时,就用四面体。这里不能用扫掠网格,所以使用了四面体网格。(5)使用六面体主导的网格划分方法。 得到的结果如下 该方法在表面用六面体单元,而在内部也尽量用六面体单元,当无法用六面体单元时,就用四面体单元填充。由于四面体单元相对较差,所以它比较能够保证表面的单元质量。 总体来说,对于空间物体而言,我们应当尽量使用六面体网格。 当对象是一个简单的规则体时,使用扫掠网格划分是合适的; 当对象是对个简单的规则体组成时,使用多域扫掠网格划分是合适的; 接着尽量使用六面体主导的方式,它会在外层形成六面体网格,而在心部填充四面体网格。四面体网格是最后的选择。其中 如果要忽略一些小细节,如倒角,小孔等,则使用patch independent算法; 如果要要考虑一些小细节,则使用patch conforming算法。
结构化网格与非结构化网格
对于连续的物理系统的数学描述,如航天飞机周围的空气的流动,水坝的应力集中等等,通常是用偏微分方程来完成的。为了在计算机上实现对这些物理系统的行为或状态的模拟,连续的方程必须离散化,在方程的求解域上(时间和空间)仅仅需要有限个点,通过计算这些点上的未知变量既而得到整个区域上的物理量的分布。有限差分,有限体积和有限元等数值方法都是通过这种方法来实现的。这些数值方法的非常重要的一个部分就是实现对求解区域的网格剖分。 网格剖分技术已经有几十年的发展历史了。到目前为止,结构化网格技术发展得相对比较成熟,而非结构化网格技术由于起步较晚,实现比较困难等方面的原因,现在正在处于逐渐走向成熟的阶段。下面就简要介绍一些这方面的情况。 1.1结构化网格 从严格意义上讲,结构化网格是指网格区域内所有的内部点都具有相同的毗邻单元。结构化网格生成技术有大量的文献资料[1,2,3,4]。结构化网格有很多优点: 1.它可以很容易地实现区域的边界拟合,适于流体和表面应力集中等方面的计算。 2.网格生成的速度快。 3.网格生成的质量好 4.数据结构简单 5.对曲面或空间的拟合大多数采用参数化或样条插值的方法得到,区域光滑,与实际的模型更容易接近。 它的最典型的缺点是适用的范围比较窄。尤其随着近几年的计算机和数值方法的快速发展,人们对求解区域的复杂性的要求越来越高,在这种情况下,结构化网格生成技术就显得力不从心了。 结构化网格的生成技术只要有: 代数网格生成方法。主要应用参数化和插值的方法,对处理简单的求解区域十分有效。PDE网格生成方法。主要用于空间曲面网格的生成。 1.2非结构化网格 同结构化网格的定义相对应,非结构化网格是指网格区域内的内部点不具有相同的毗邻单元。即与网格剖分区域内的不同内点相连的网格数目不同。从定义上可以看出,结构化网格和非结构化网格有相互重叠的部分,即非结构化网格中可能会包含结构化网格的部分。 非结构化网格技术从六十年代开始得到了发展,主要是弥补结构化网格不能够解决任意形状和任意连通区域的网格剖分的缺欠.到90年代时,非结构化网格的文献达到了它的高峰时期.由于非结构化网格的生成技术比较复杂,随着人们对求解区域的复杂性的不断提高,对非结构化网格生成技术的要求越来越高.从现在的文献调查的情况来看,非结构化网格生成技术中只有平面三角形的自动生成技术比较成熟(边界的恢复问题仍然是一个难题,现在正在广泛讨论),平面四边形网格的生成技术正在走向成熟。而空间任意曲面的三角形、四边形网格的生成,三维任意几何形状实体的四面体网格和六面体网格的生成技术还远远没有达到成熟。需要解决的问题还非常多。主要的困难是从二维到三维以后,待剖分网格的空间区非常复杂,除四面体单元以外,很难生成同一种类型的网格。需要各种网格形式之间的过度,如金字塔形,五面体形等等。 非结构化网格技术的分类,可以根据应用的领域分为应用于差分法的网格生成技术(常常成为grid generation technology)和应用于有限元方法中的网格生成技术(常常成为mesh generation technology),应用于差分计算领域的网格要除了要满足区域的几何形状要求以外,还要满足某些特殊的性质(如垂直正交,与流线平行正交等),因而从技术实现上来说就更困难一些。基于有限元方法的网格生成技术相对非常自由,对生成的网格只要满足一些形状
Fluent 结构化网格与非结构化网格
简单地说:结构化网格只包含四边形或者六面体,非结构化网格是三角形和四面体。 结构网格再拓扑结构上相当于矩形域内的均匀网格,器节点定义在每一层的网格线上,且每一层上节点数都是相等的,这样使复杂外形的贴体网格生成比较困难。非结构网格没有规则的拓扑结构,也没有层的概念,网格节点的分布是随意的,因此具有灵活性。不过非结构网格计算的时候需要较大的内存。 在计算流体动力学中,按照一定规律分布于流场中的离散点的集合叫网格(Grid),分布这些网格节点的过程叫网格生成(Grid Generation)。网格生成对CFD至关重要,直接关系到CFD计算问题的成败。 非结构三角形网格方法 复杂外形网格生成的第二方向是最近应用比较广泛的非结构三角形网格方法,它利用三角形(二维)或四面体(三维)在定义复杂外形时的灵活性,以Delaunay法或推进波阵面法为基础,全部采用三角形(四面体)来填充二维(三维)空间,它消除了结构网格中节点的结构性限制,节点和单元的分可控性好,因而能较好地处理边界,适用于模拟真实复杂外型。非结构网格生成方法在其生成过程中采用一定的准则进行优化判断,因而能生成高质量的网格,很容易控制网格的大小和节点的密度,它采用随机的数据结构有利于进行网格自适应。一旦在边界上指定网格的分布,在边界之间可以自动生成网格,无需分块或用户的干预,而且不需要在子域之间传递信息。因而,近年来非结构网格方法受到了高度的重视,有了很大发展。 非结构网格方法的一个不利之处就是不能很好地处理粘性问题,在附面层内只采用三角形或四面体网格,其网格数量将极其巨大。现在比较好的方法就是采用混合网格技术,即先贴体生成能用于粘性计算的四边型或三棱柱网格,然后以此为物面边界,生成三角形非结构网格,但是生成复杂外型的四边形或三棱柱网格难度很大。 非结构网格方法的另一个不利之处就是对于相同的物理空间,网格填充效率不高,在满足同样流场计算条件的情况下,它产生的网格数量要比结构网格的数量大得多(一个长方体要划分为5个四面体)。随机的数据结构也增加了流场参数交换的时间,因此此方法要求较大的计算机内存,计算时间长。在物面附近,非结构网格方法,特别是对于复杂外形如凹槽、细缝等处比较难以处理。 非结构网格与结构网格一样都属于贴体网格,模型表面网格的好坏直接关系到空间网格的质量,因而它们的模型表面网格必须同时与网格拓扑结构和当地的几何外形特性相适应,为了更好地适应其中一方面,有时不得不在另一方面作出让步,因而往往顾此失彼。因此,在生成非结构网格和结构网格时,处理模型表面又成为一个关键而费时的工作。 计算精度,主要在于网格的质量(正交性,长宽比等),并不决定于拓扑(是结构化还是非结构化)。个人感觉采用结构化网格还是非结构化网格,主要看解决什么问题,如果是无粘欧拉方程的话,只要合理布局,结构和非结构都能得到较为理想的结果。但如果涉及到粘性影响的话,尤其在壁面处,结构网格有一定优势,并且其对外形适应性差的缺点,也可以通过多块拼接网格解决。事实上,目前有的非结构网格软件,也开始借鉴结构网格的优点,在壁面处进行了类似结构网格的处理,如cfx的壁面加密功能。 一般来说,网格节点走向(这里假设计算过程中物理量定义在网格节点上)贴近流动方向,那么计算的结果就要好一些。对于不是非常复杂的流动。例如气体的喷管流动,使用四边形(二维)网格就比较三角形网格要好。不过即便是四边形网格,fluent也是按照无结构网格进行处理的。 非结构和结构网格的计算结果如何取决于算法,除非网格实在惨不忍睹。我觉得现在已发展到了基于结构网格与非结构网格上的计算,各自的优势相差越来越不是很明显了。
结构化网格和非结构化网格特点
关于网格的经典文献你可以参看thomphson的Numecrial grid generation那本书,讲的有pde 和参数化代数方法.书后附有算例和代码. NURBS参数化曲线和曲面在自由曲线和曲面的cad造型广泛应用,也见到国内外的文献提到用这种方法生成网格,国内可能还没用这种方法来生成网格的实例. 如果网格生成算法感兴趣,可以看看。 关于结构和非结构网格,各有应用场合。个人比较喜欢结构网格。通过观察IDEAS中结构网格生成的步骤及要求,我觉得对于复杂的几何体,生成结构网格也是可以的,前提是采用适当的partition方法,将几何体分解成规则的基本几何体。而分解几何体是几何建模的任务。 个人感觉:生成网格的软件名目繁多,但是网格生成基本原理和算法可以归成下列所述的类别。 主要差别可能在于辅助的几何建模方法不同。网格生成应当辅以几何建模,只有与几何建模结合,才可以对复杂几何体生成高质量的网格。 网格生成的另外一个要素就是物体的参数化表示技术,当采用适当的参数化表示实体表面时,同样的网格生成技术有时候可以得到非常好的网格。NURBS是我所知道的CDA/CAM中应用较为广泛的构造复杂曲面的参数化表示技术。 不知道哪位朋友可以提供一些关于网格生成基本算法的源代码。 对于连续的物理系统的数学描述,如航天飞机周围的空气的流动,水坝的应力集中等 等,通常是用偏微分方程来完成的。为了在计算机上实现对这些物理系统的行为或状态的模拟,连续的方程必须离散化,在方程的求解域上(时间和空间)仅仅需要有限个点,通过 计算这些点上的未知变量既而得到整个区域上的物理量的分布。有限差分,有限体积和有 限元等数值方法都是通过这种方法来实现的。这些数值方法的非常重要的一个部分就是实 现对求解区域的网格剖分。 网格剖分技术已经有几十年的发展历史了。到目前为止,结构化网格技术发展得相对 比较成熟,而非结构化网格技术由于起步较晚,实现比较困难等方面的原因,现在正在处 于逐渐走向成熟的阶段。下面就简要介绍一些这方面的情况。 1.1结构化网格 从严格意义上讲,结构化网格是指网格区域内所有的内部点都具有相同的毗邻单元。 结构化网格生成技术有大量的文献资料[1,2,3,4]。结构化网格有很多优点: 1.它可以很容易地实现区域的边界拟合,适于流体和表面应力集中等方面的计算。 2.网格生成的速度快。 3.网格生成的质量好 4.数据结构简单 5.对曲面或空间的拟合大多数采用参数化或样条插值的方法得到,区域光滑,与实际 的模型更容易接近。 它的最典型的缺点是适用的范围比较窄。尤其随着近几年的计算机和数值方法的快速 发展,人们对求解区域的复杂性的要求越来越高,在这种情况下,结构化网格生成技术就 显得力不从心了。 结构化网格的生成技术只要有:代数网格生成方法。主要应用参数化和插值的方法,对处理简单的求解区域十分有效。
结构化网格和非结构化网格
结构化网格只包含四边形或者六面体,非结构化网格是三角形和四面体。 结构网格在拓扑结构上相当于矩形域内的均匀网格,器节点定义在每一层的网格线上,且每一层上节点数都是相等的,这样使复杂外形的贴体网格生成比较困难。非结构网格没有规则的拓扑结构,也没有层的概念,网格节点的分布是随意的,因此具有灵活性。不过非结构网格计算的时候需要较大的内存。 非结构网格不利之处就是不能很好地处理粘性问题,在附面层内只采用三角形或四面体网格,其网格数量将极其巨大。现在比较好的方法就是采用混合网格技术,即先贴体生成能用于粘性计算的四边型或三棱柱网格,然后以此为物面边界,生成三角形非结构网格,但是生成复杂外型的四边形或三棱柱网格难度很大。在物面附近,非结构网格方法,特别是对于复杂外形如凹槽、细缝等处难以处理。 到空间网格的质量, 几何外形特性相适应,为了更好地适应其中一方面,有时不得不在另一方面做出让步,因而往往顾此失彼。 计算精度,主要在于网格的质量(正交性,长宽比等),并不决定于拓扑(是结构化还是非结构化)。采用结构化网格还是非结构化网格,主要看解决什么问题,如果是无粘欧拉方程的话,只要合理布局,结构和非结构都能得到较为理想的结果。但如果涉及到粘性影响的话,尤其在壁面处,结构网格有一定优势,并且其对外形适应性差的缺点,也可以通过多块拼接网格解决。目前有的非结构网格软件,也开始借鉴结构网格,如cfx的壁面加密功能。 网格节点走向(这里假设计算过程中物理量定义在网格节点上)贴近流动方向,那么计算的结果就要好一些。对于不是非常复杂的流动。例如气体的喷管流动,使用四边形(二维)网格就比三角形网格要好。不过即便是四边形网格,fluent 也是按照无结构网格进行处理的。主要是看流向是否与网格平行如果是平行的则计算中不容易出现假扩散,计算的结果就好,但是成角度的时候计算的结果搞不好就有扩散现象,所以不在于结构和非结构。 非结构和结构网格的计算结果如何取决于算法。GRIDGEN在结构网格方面有着强大的生命力,很多非常复杂的几何形状用它没问题;基于非结构网格方面的计算格式得到的结果的准确度也不次于基于结构网格的结果了。
COMSOL3.5重要案例——网格的扫掠
案例—薄层扩散 本例说明如何使用一致边界条件将两个分离的几何结构连接成一个3D的薄层扩散模型,它还说明了使用不同类型的网格单元,对于这种薄层结构,使用砖形和棱柱形单元极大地减少了自由度(DOF)的数量。要了解更多的关于网格单元和网格剖分选项,请参考 COMSOL Multiphysics用户指南的“网格剖分”。 本例中通过使用砖形和棱柱网格,而不是使用非结构化四面体网格,可以极大地减少自由度数(DOF),从而节省计算时间。使用这种方法,本例中的DOF只有2300左右。而使用缺省的四面体网格则需要大约18,000左右的DOF。 模型处理的是一个单物质扩散,因变量是浓度 c 。除了入口和出口,其他所有边界均为绝缘边界。入口浓度为 c 0 ,出口(底面)是向外通量? r surf c/c 0 (COMSOL Multiphysics定义向内通量为正),其中r surf 是表面反应速率。在底板上考虑采用一个有效扩散系数来处理多孔性。Table 15-2列出了模型采用的所有材料属性。 上下两个部分界面上的条件为两侧的浓度 c 相等。 模型库路径: COMSOL_Multiphysics/Diffusion/thin_layer_diffusion
8画一个圆心位于(3e-6, 3e-6),半径为2e-6的圆C1,点击绘图工具条上的椭圆/圆 (以圆心)按钮,然后使用鼠标右键在绘图区中画出这个圆。
3点击确定,将上述四边形网格向 z 方向拉伸-0.4微米,从而创建一个新的3D几何的砖形网格,Geom3 (3D)。
5点击确定,将三角形网格向 z 轴方向拉伸0.2 μ m,从而在一个新的3D几何Geom4 (3D)中建立了一个棱柱网格。
workbench 四面体网格膨胀
第五章 四面体网格膨胀
概述 Training Manual ?四面体网格划分算法 ?Patch Conforming的膨胀选项 –算法 –前处理和后处理 –高级选项 –冲突避免 ?Patch Independent 划分 P t h I d d t –损伤外貌 y –Proximity 细化 –Curvature 细化 ?作业5.1 三通搅拌器的膨胀四面体网格 (Patch Conforming) (P t h C f i) ?作业5.2 汽车多支管的流体和结构网格划分 (Patch Independent) (Patch Independent)
四面体网格划分算法 Training Manual ?Patch Conforming –默认时考虑所有的面和边(尽管在收缩控制和虚拟拓扑时会改变且默认损伤外貌基于最小尺寸限制) –适度简化CAD (如. native CAD, Parasolid, ACIS, 等.) 在体部件中结使扫共体棱柱体格 –在多体部件中可能结合使用扫掠方法生成共形的混合四面体/棱柱和六面体网格 –有高级尺寸功能 –表面网格体网格 ?Patch Independent –对CAD 有长边的面, 许多面的修补, 短边等有用. –内置defeaturing/simplification 基于网格技术 –基于ICEM CFD 四面体/棱柱Octree 方法 –体网格表面网格
Patch Conforming 四面体膨胀 Training Manual ?基本设置包括膨胀选项,前处理和后处理膨胀算法
膨胀选项–平滑过渡 Training Manual ?平滑过渡(默认) –使用局部四面体单元尺寸计算每个局部的初始高度和总高度以达到平滑的体积变化比。每个膨胀的三角形都有一个关于面积计算的初始高度,在节点处平均。这意味着对一均匀网格,初始高度大致相同,而对变化网格初始高度也是不同的。 –过渡比 ?膨胀层最后单元层和四面体区域第一单元层间的体尺寸改变 ?当求解器设置为CFX时, 默认的Transition Ratio是0.77. 对其它物理选项, 包括Solver Preference设置为Fluent的CFD, 默认值是0.272. ?因为Fluent求解器是单元为中心的,其网格单元等于求解器单元, 而CFX求解器是顶点 为中心的,求解器单元是双重节点网格构造的,因此会发生不同的处理
基于四面体控制网格的模型变形算法 (1)
第20卷第9期2008年9月 计算机辅助设计与图形学学报 JO U RN A L O F COM PU T ER AID ED D ESIG N &COM P U T ER G RA PH ICS Vo l.20,N o.9 Sep.,2008 收稿日期:2008-07-15.基金项目:国家 九七三 重点基础研究发展规划项目(2002CB312101,2006CB303102);国家自然科学基金(60603078);新世纪优秀人才项目(NCET 06 0516).赵 勇,男,1982年生,博士研究生,主要研究方向为数字几何处理.刘新国,男,1972年生,博士,教授,博士生导师,主要研究方向为数字几何处理、真实感绘制、虚拟现实等.彭群生,男,1947年生,博士,教授,博士生导师,CC F 高级会员,主要研究方向为真实感图形、虚拟现实、科学计算可视化等. 基于四面体控制网格的模型变形算法 赵 勇 刘新国 彭群生 (浙江大学CAD &CG 国家重点实验室 杭州 310058)(z haoyong@cad.z https://www.360docs.net/doc/f72518594.html,) 摘要 提出一种鲁棒的保体积保表面细节的模型变形算法.首先将输入模型嵌入到一个稀疏的四面体控制网格 中,并且通过一种改进的重心坐标来建立两者的对应关系;然后通过用户的交互,对控制网格建立一个二次非线性能量函数对其进行变形,而输入模型的变形结果则可以通过插值来直接获得.由于能量函数的优化是在控制网格上进行的,从而大大提高了算法的效率.与此同时,提出一种新的能量!!!Laplacian 能量,可以使四面体控制网格进行尽量刚性的变形,从而有效地防止了大尺度编辑过程中模型形状的退化现象.文中算法还具有通用性,可支持多种模型的表示方式,如三角网格模型、点模型等.实验结果表明,该算法可以有效地保持输入模型的几何细节、防止明显的体积变化,得到了令人满意的结果. 关键词 模型编辑;四面体控制网格;刚性变形;L aplacian 能量;通用性中图法分类号 T P391 Shape Deformation Based on Tetrahedral Control Mesh Zhao Yong Liu Xing uo Peng Qunsheng (S tate K ey L abor atory of CA D &CG ,Zh ej iang Univ ersity ,H ang z hou 310058) Abstract A robust shape deformation algo rithm w ith the feature o f both vo lum e and surface detail preserv ing is presented.Fir st,the input m odel is embedded into a coarse tetr ahedral co ntro l mesh,and the m odified bar ycentr ic coordinates are employ ed to establish their relationship.Then acco rding to user s editing,the contro l mesh is defor med by solving a quadric no nlinear ener gy m inimization pro blem,and the deform ation is passed to the embedded m odel by interpolatio n.As the optimization pro cess is applied to the control mesh composed of sparse vertices,the efficiency is g reatly improved.Meantime,w e incor porate a new energ y,called Laplacian energ y,into the energy equatio n to m ake the tetrahedral contro l m esh deform as rigidly as possible,thus avoiding shape degenerations even under ex treme editing.Our algor ithm acco mmodates various shape repr esentations,such as triangular meshes,point clouds etc.Experiments demonstrate that the Laplacian energy is very effective in preserv ing geom etric details and pr eventing unreasonable volume changes. Key words shape editing;tetrahedral contr ol m esh;r ig id defor matio n;Laplacian energ y;generality 近年来,随着三维数据采集技术的不断发展,三维数字几何模型已经在数字娱乐、工业设计、医学辅 助诊断、文物保护等很多领域得到了广泛的应用.数字几何处理作为计算机图形学的一个重要分支也得
四面体剖分的实现
四面体剖分的实现 1 研究现状 网格剖分算法经历了从平面到曲面,再到三维实体剖分的发展过程,国内外学者为推动网格剖分的发展做出了很多贡献。作为当前网格生成领域研究热点的四面体剖分,出现了很多方法,其中比较成熟和普遍使用的算法有:Delaunay 法和前沿推进法,以及映射法、栅格法、模板法和多区域法等。 Delaunay法在三维空间存在边界一致性和薄元处理等问题,由于这些问题的存在,使Delaunay法适用范围有限,稳定性不好。针对存在的这些问题,Y Bai 等改良了约束Delaunay网格生成算法;陈学工等提出可消除退化现象引起的潜在错误的方法。前沿推进法是节点和单元同步生成。前沿推进法是一种全自动网格剖分算法,三维的前沿推进法是从待剖分域的表面三角形集合(称作初始前沿队列)开始,循环往复,当前沿队列为空时结束的一种网格划分方法。前沿推进法缺乏一般性的理论支撑,要进行大量的算术判断,占用了大量时间,因此对数据结构的要求很髙,对于三维空间前沿推进法还存在收敛性等问题。基于此很多人都对前沿推进法做了改进工作,吴宝海等提出一种两侧推进的波前法,Li等人采用由内而外的波前推进的方式生成了全六面体网格。 除过以上介绍的算法,四面体网格划分有针对不同问题的算法。如陈一民等提出对多面体进行划分的算法; B Jonathan等提出一种多材质的四面体网格生成算法;J Wang等提出了一种能得到高质量四面体网格的自适应算法;S Tian 等提出了一种在模型轮廓的基础上生成网格的算法;R Montenegro等提出自动生成自适应四面体网格的算法。 如何自动划分网格逐渐成为有限元法发展的瓶颈,许多科学家和工程师在全自动有限元网格划分算法的研巧和实现上努力。网格生成是实际问题求解的前提,对于超薄、相邻或包含关系的复杂模型,生成符合实际要求的有限元网格是一个耗时很大的任务。此时,网格的自动生成算法节省时间的同时提供了髙精度,保证了问题分析的准确性。自动网格剖分算法发展至今,很多商业软件如Fluent、Ansys、Hyper mash等都提供了相应的网格剖分模块,对于规则的几何形状,生
门主ICEM非结构网格1四面体网格
四面体网格生成一般流程 1、建立body 2、Global Mesh Setup(全局网格设定) ●全局网格尺寸 ●体网格尺寸:设定体网格类型及生成方法 3、Mesh Size for Parts(Part网格尺寸设定) 4、Surface Mesh Setup(面网格尺寸设定) 5、Curve Mesh Parameters(曲线网格参数设定) 6、Create Mesh Density(设定网格加密区) 7、Compute Mesh(计算生成网格) 8、Smooth Mesh Globally(网格光顺) 9、检查网格质量
示例1、运动体倾斜入水 几何模型如下图所示 步骤1 建立body 选择介于运动体与大圆柱之间屏幕的任意两个位置,单击中键确定。 (说明:在想要生成非结构网格的计算域建立Body,ICEM会根据这个点搜索包围它的最小闭合区域作为一个计算域。) 步骤2 定义全局网格尺寸 本例中定义为32 (说明: 1、最大网格尺寸最好取值为2的指数幂(帮助文 档建议) 2、实际网格生成的最大尺寸等于Scale factor与 Max element的乘积)
步骤3 定义网格类型及生成方法 选择网格类型Tetra/Mixed,生成方法为 Robust(Octree)。 (说明: 1、Tetra/Mixed默认情况下生成四面体网格,通过 设定可以创建三棱柱边界层网格(Prism),也可 以生成以六面体为主的体网格(Hexcore) 2、Robust(Octree)方法使用八叉树方法生成四面 体网格,是一种自上而下的网格生成方法,即 先生成体网格,后生成面网格。一般保持默认。) 步骤4 定义Part网格尺寸 本例中将弹体表面分别定义为三个part,最大网格尺寸分别定义为2、2、1。 (说明;由于本例中Part所定义的内容即为面,所以省略下一步的“表面网格设定”) 步骤 ..5 .建立加密区 ..... 本例中运动体尾部和头部X方向坐标分别为160、200,半径为4,要对运动体周围进行加密。 1、创建点(140,0,0)、(220,0,0) 2、单击图示Create Mesh Density按钮,在size处输入4,width处输入4,ratio 处输入1.2,选择上一步创建好的两点,Apply生成加密区如右下图黄色线。
ANSYSWorkbenchMesh网格划分(自己总结)
Workbench Mesh网格划分分析步骤网格划分工具平台就是为ANSYS软件的不同物理场和求解器提供相应的网格文件,Workbench中集成了很多网格划分软件/应用程序,有ICEM CFD,TGrid,CFX,GAMBIT,ANSYS Prep/Post等。网格文件有两类: ①有限元分析(FEM)的结构网格: 结构动力学分析,电磁场仿真,显示动力学分析(AUTODYN,ANSYS LS DYNA); ②计算流体力学(CFD 分析)分析的网格:用于ANSYS CFX,ANSYS FLUENT,Polyflow; 这两类网格的具体要求如下: (1)结构网格: ①细化网格来捕捉关心部位的梯度,例如温度、应变能、应力能、位移等; ②大部分可划分为四面体网格,但六面体单元仍然是首选; ③有些显示有限元求解器需要六面体网格; ④结构网格的四面体单元通常是二阶的(单元边上包含中节点); (2)CFD网格: ①细化网格来捕捉关心的梯度,例如速度、压力、温度等; ②由于是流体分析,网格的质量和平滑度对结果的精确度至关重要,这导致较大的网格数量,经常数百万的单元; ③大部分可划分为四面体网格,但六面体单元仍然是首选,流体分析中,同样的求解精度,六面体节点数少于四面体网格的一半。 ④CFD网格的四面体单元通常是一阶的(单元边上不包含中节点) 一般而言,针对不同分析类型有不同的网格划分要求: ①结构分析:使用高阶单元划分较为粗糙的网格; ②CFD:好的,平滑过渡的网格,边界层转化(不同CFD 求解器也有不同的要求); ③显示动力学分析:需要均匀尺寸的网格;
注:上面的几项分别对应Advanced中的Element Midside Nodes,以及Sizeing中的 Relevance Center,Smoothing,Transition。 网格划分的目的是对CFD (流体) 和FEM (结构) 模型实现离散化,把求解域分解成可得到精确解的适当数量的单元。 用户需要权衡计算成本和网格划分份数之间的矛盾。细密的网格可以使结果更精确,但是会增加CPU计算时间和需要更大的存储空间,特别是有些不必要的细节会大大增加分析需求。而有些地方,如复杂应力梯度区域,这些区域需要高密度的网格,如下图所示。一般而言,我们需要特别留意几何体中物理量变化特别大的区域,这些地方的网格需要划分得细密一些!