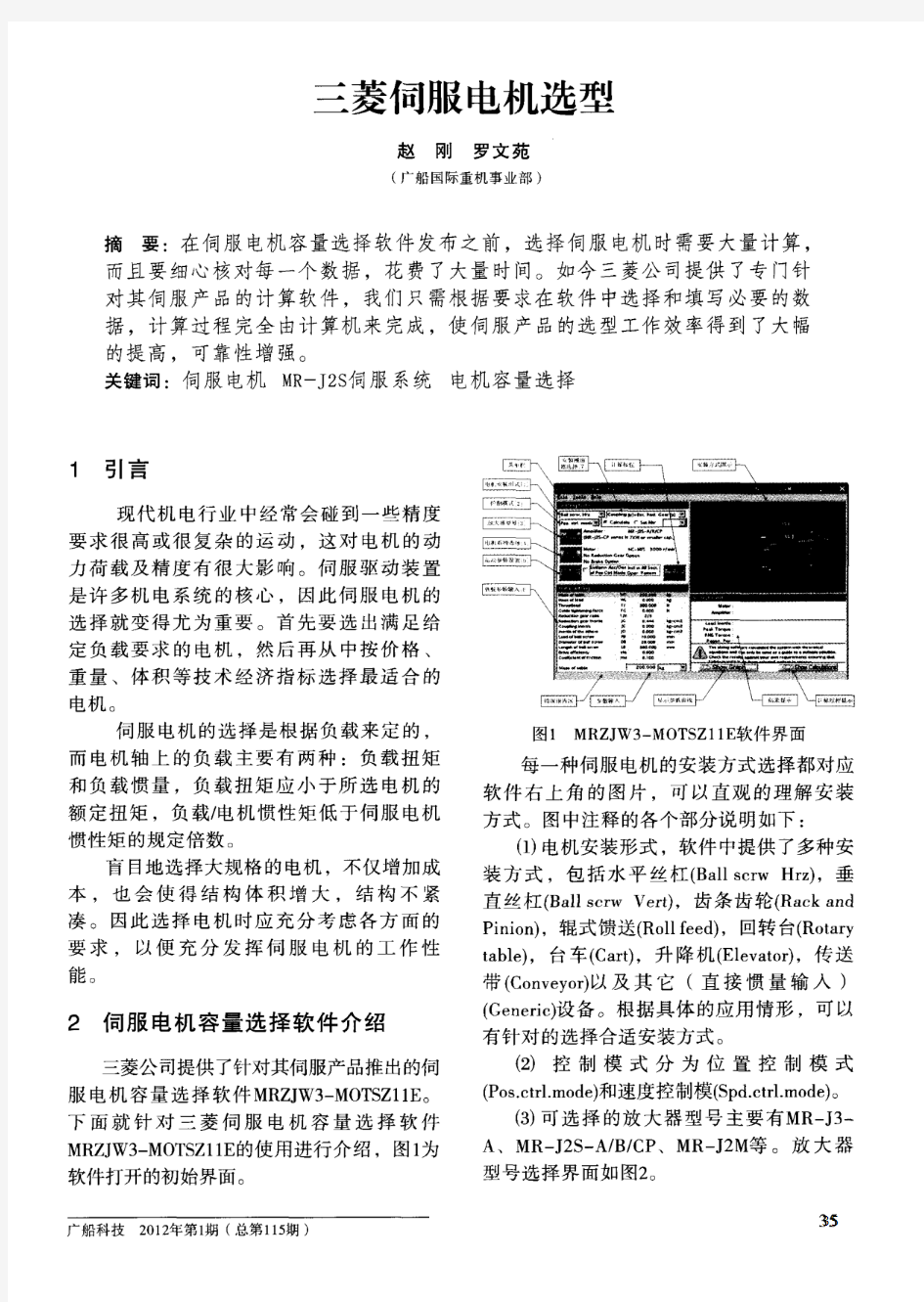
三菱伺服电机选型

富士伺服电机选型计算资料
附录 ■容量选择计算■电脑编程器■参数表
附 附录 容量选择计算 (1) 机械系统的种类 用可变速电机驱动的机械系统,一般有以下几类。 机构特点 滚珠丝杠(直接连接) 用于距离较短的高精度定位。 电机和滚珠丝杠只用联轴节连接,没有间隙。 滚珠丝杠(减速) 选择减速比,可加大向机械系统传递的转矩。 由于产生齿轮侧隙,需要采取补偿措施。 齿条和小齿轮 用于距离较长的(台车驱动等)定位。小齿轮转 动一圈包含了π值,因此需要修正。 同步皮带(传送带) 与链条比较,形态上的自由度变大。 主要用于轻载。皮带轮转动一圈的移动量中包含π 值,因此需要修正。 将伺服系统用于机械系统中时,请注意以下各点。 ①减速比 为了有效利用伺服电机的功率,应在接近电机的额定速度(最高旋转速度)数值的范围使用。在最高旋 转速度下连续输出转矩,还是比额定转矩小。 ②预压转矩 对丝杠加预压力,刚性增强,负载转矩值增大。 由预压产生的摩擦转矩,请参照滚珠丝杠规格书。 ③保持转矩 升降机械在停止时,伺服电机继续输出保持力。 在时间充裕的场合,建议使用保持制动。
附-2
附录附 机构特点 链条驱动 多用于输送线上。必须考虑链条本身的伸长并采取相应的措施。在减速 比比较大的状态下使用,机械系统的移动速度小。 进料辊 将板带上的材料夹入辊间送出。 由于未严密确定辊子直径,在尺寸长的物件上将产生误差,需进行π补 偿。 如果急剧加速,将产生打滑,送出量不足。 转盘分度 转盘的惯性矩大,需要设定足够的减速比。 转盘的转速低,多使用蜗轮蜗杆。 主轴驱动 在卷绕线材时,由于惯性矩大,需要设定够的减速比。 在等圆周速度控制中,必须把周边机械考虑进来研究。
伺服电机计算选择应用实例
伺服电机计算选择应用实例 1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。 例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05 π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgf Fc :由切削力引起的反推力(kgf )=100 kgf Fcf :由切削力矩引起的滑动表面上工作台受到的力(kgf ) =30kgf Z1/Z2: 变速比=1/1 例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm 例:电机轴的运行规格 Ta :加速力矩(kgf.cm ) Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2) ks :伺服的位置回路增益(sec -1)=30 sec -1 1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出: Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mm Tf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm 无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量,摩擦系数。若坐标轴是垂直轴,F 值还与平衡锤有关。对于水平工作台,F 值可按下列公式计算: 不切削时: F = μ(W+fg ) 例如: F=0.05×(1000+50)=52.5 (kgf) Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm) = 0.9(Nm) 切削时: F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm) =2.1(Nm) 为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时 应大于0.9(Nm ),最高转速应高于3000(min -1)。考虑到加/减速, F ×L 2πη
伺服电机及选型
伺服电机及选型 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
伺服电机伺服电机(servomotor)是指在伺服系统中控制机械元件运转的发动机。伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,可把所收到的转换成电动机轴上的角位移或输出。 “伺服”一词源于希腊语“奴隶”的意思,“伺服电机”可以理解为绝对服从控制信号指挥的电机:在控制信号发出之前,转子静止不动,当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。因此伺服电机指的是随时跟随命令进行动作的一种电机,是以其工作性质命名的。 伺服主要靠脉冲来定位,伺服电机接收到一个脉冲就会旋转一个脉冲对应的角度,从而实现位移。伺服本身带有编码器,具备发出脉冲的功能,所以伺服电机每旋转一个角度,就会发出对应数量的脉冲。等于是把电机旋转的详细信息反馈回去,形成闭环。这样的话,系统就会知道发了多少脉冲给电机,同时又收了多少脉冲回来,这样就能很精准的控制电机的转动,实现非常精准的定位。 一、伺服电机分类 1、直流伺服 结构简单控制容易。但从实际运行考虑,直流伺服电动机引入了机械换向装置,成本高,故障多,维护困难,经常因碳刷产生的火花影响生产,会产生电磁干扰。而且碳刷需要维护更换。机械换向器的换向能力,也限制了电动机的容量和速度。 2、交流伺服 分为永磁同步伺服电机和异步伺服电机。目前运动控制基本都用同步电机。
永磁同步伺服电机内部的转子是永磁铁,驱动器控制的U/V/W 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。特点如下: 1、控制速度非常快,从启动到额定转速只需几毫秒;而相同情况下异步电机却需要几秒钟。 2、启动扭矩大,可以带动大惯量的物体进行运动。 3、功率密度大,相同功率范围下相比异步电机可以把体积做得更小、重量做得更轻。 4、运行效率高。 5、可支持低速长时间运行。 6、断电无自转现象,可快速控制停止动作。 7、控制和响应性能比异步伺服电机高很多。 二、伺服电机计算 、电机转矩 电机转矩,简单的说,就是转动的力量的大小。也就是电机可以发出多大的力,转矩是一种力矩,力矩在物理中的定义是: 力矩= 力 ×力臂 这里的力臂就可以看成电机所带动的物体的转动半径。如果电机转矩太小,就带不动所要带的物体,也就是感觉电机的“劲”不够大。 假设我们是采用滚珠丝杆使工件做平行移动: 假设: 负载速度: s m v L /01.0= 检测物体质量: kg m j 5= 移动块质量: kg m z 25= 滚珠丝杆直径: m d B 02.0=
伺服电机计算选择应用实例全解
伺服电机计算选择应用实例 1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。 例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05 π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgf Fc :由切削力引起的反推力(kgf )=100 kgf Fcf :由切削力矩引起的滑动表面上工作台受到的力(kgf ) =30kgf Z1/Z2: 变速比=1/1 例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm 例:电机轴的运行规格 Ta :加速力矩(kgf.cm ) Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2) ks :伺服的位置回路增益(sec -1)=30 sec -1 1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出: Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mm Tf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm F ×L 2πη
无论是否在切削,是垂直轴还是水平轴,F值取决于工作台的重量, 摩擦系数。若坐标轴是垂直轴,F值还与平衡锤有关。对于水平工 作台,F值可按下列公式计算: 不切削时: F = μ(W+fg) 例如: F=0.05×(1000+50)=52.5 (kgf) Tm = (52.5×0.8) / (2×μ×0.9)+2=9.4(kgf.cm) = 0.9(Nm) 切削时: F = Fc+μ(W+fg+Fcf) 例如: F=100+0.05×(1000+50+30)=154(kgf) Tmc=(154×0.8) / (2×μ×0.9)+2=21.8(kgf.cm) =2.1(Nm) 为了满足条件1,应根据数据单选择电机,其负载力矩在不切削时 应大于0.9(Nm),最高转速应高于3000(min-1)。考虑到加/减速, 可选择α2/3000(其静止时的额定转矩为2.0 Nm)。 ·注计算力矩时,要注意以下几点: 。考虑由镶条锁紧力(fg)引起的摩擦力矩 根据运动部件的重量和摩擦系数计算的力矩通常相当小。镶条 锁紧力和滑动表面的质量对力矩有很大影响。 。滚珠丝杠的轴承和螺母的预加负荷,丝杠的预应力及其它一些因 素有可能使得滚动接触的Fc相当大。小型和轻型机床其摩擦力矩 会大大影响电机的承受的力矩。 。考虑由切削力引起的滑动表面摩擦力(Fcf)的增加。切削力和驱 动力通常并不作用在一个公共点上如下图所示。当切削力很大时, 造成的力矩会增加滑动表面的负载。 当计算切削时的力矩时要考虑由负载引起的摩擦力矩。 。进给速度会使摩擦力矩变化很大。欲得到精确的摩擦力矩值,应 仔细研究速度变化,工作台支撑结构(滑动接触,滚动接触和静压 力等),滑动表面材料,润滑情况和其它因素对摩擦力的影响。 。机床的装配情况,环境温度,润滑状况对一台机床的摩擦力矩影 响也很大。大量搜集同一型号机床的数据可以较为精确的计算其负
交流伺服电机选型重点学习的手册范本.doc
ST 系列交流伺服电机型号编号说明 1:表示电机外径 , 单位 :mm。 2:表示电机是正弦波驱动的永磁同步交流伺服电机。 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。 4:表示电机零速转矩,其值为三位数×,单位:Nm。 5:表示电机额定转速,其值为二位数×100,单位: rpm。 6:表示电机适配的驱动器工作电压,L— AC220V, H— AC380V。 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T ), R— 1 对极旋转变压器。 8:表示电机类型,B—基本型。 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器 2:表示 IPM 模块的额定电流( 15/20/30/50/75A ) 3:表示功能代码( M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机ST系列电机ST 系列电机主要参数 适配驱动器 额定功率 电机型号额定转矩额定转速外形尺寸零售价 ( 元 ) 110ST-M02030 2 Nm 3000rpm 110×110×158 1500 110ST-M04030 4 Nm 3000rpm 110×110×185 1700 110ST-M05030 5 Nm 3000rpm 110×110×2001800 110ST-M06020 6 Nm 2000rpm SD15M 110×110×217 1900 SD20MN 110ST-M06030 6 Nm 3000rpm SD30MN 110×110×217 1900 SD50MN 130ST-M04025 4 Nm 2500rpm SD75MN 130×130×163 1800 130ST-M05025 5 Nm 2500rpm 130×130×171 2100 130ST-M06025 6 Nm 2500rpm 130×130×181 2400 130ST-M07720Nm2000rpm130×130×1952900
图解伺服电机选型实例
伺服电机计算选择应用实例 1. 选择电机时的计算条件 本节叙述水平运动伺服轴(见下图)的电机选择步骤。 例:工作台和工件的 W :运动部件(工作台及工件)的重量(kgf )=1000 kgf 机械规格 μ :滑动表面的摩擦系数=0.05 π :驱动系统(包括滚珠丝杠)的效率=0.9 fg :镶条锁紧力(kgf )=50 kgf Fc :由切削力引起的反推力(kgf )=100 kgf Fcf :由切削力矩引起的滑动表面上工作台受到的力(kgf ) =30kgf Z1/Z2: 变速比=1/1 例:进给丝杠的(滚珠 Db :轴径=32 mm 丝杠)的规格 Lb :轴长=1000 mm P :节距=8 mm 例:电机轴的运行规格 Ta :加速力矩(kgf.cm ) Vm :快速移动时的电机速度(mm -1)=3000 mm -1 ta :加速时间(s)=0.10 s Jm :电机的惯量(kgf.cm.sec 2) Jl :负载惯量(kgf.cm.sec 2) ks :伺服的位置回路增益(sec -1)=30 sec -1 1.1 负载力矩和惯量的计算 计算负载力矩 加到电机轴上的负载力矩通常由下式算出: Tm = + Tf Tm :加到电机轴上的负载力矩(Nm) F :沿坐标轴移动一个部件(工作台或刀架)所需的力(kgf) L :电机转一转机床的移动距离=P ×(Z1/Z2)=8 mm Tf :滚珠丝杠螺母或轴承加到电机轴上的摩擦力矩=2Nm 无论是否在切削,是垂直轴还是水平轴,F 值取决于工作台的重量,摩擦系数。若坐标轴是垂直轴,F 值还与平衡锤有关。对于水平工作台,F 值可按下列公式计算: 不切削时: F = μ(W+fg ) 例如: F ×L 2πη
交流伺服电机选型手册范本
ST系列交流伺服电机型号编号说明 1: 表示电机外径,单位:mm。 2:表示电机是正弦波驱动的永磁同步交流伺服电机。 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。 4:表示电机零速转矩,其值为三位数×,单位:Nm。 5:表示电机额定转速,其值为二位数×100,单位:rpm。 6:表示电机适配的驱动器工作电压,L—AC220V,H—AC380V。 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T),R—1对极旋转变压器。 8:表示电机类型,B—基本型。 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器 2:表示IPM模块的额定电流(15/20/30/50/75A) 3:表示功能代码(M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机主要参数 适配驱动器 ST系列电机ST系列电机 电机型号额定转矩: 额定转速 额定功率外形尺寸零售价(元) 110ST-M02030 2 Nm3000rpm SD15M SD20MN SD30MN SD50MN SD75MN 】 110×110×158 1500 110ST-M04030 4 Nm3000rpm110×110×1851700 110ST-M05030@ 5 Nm 3000rpm110×110×2001800 110ST-M06020 6 Nm2000rpm110×110×2171900 110ST-M06030 6 Nm3000rpm110×110×2171900 & 130ST-M04025 4 Nm2500rpm130×130×1631800 130ST-M0502 5 5 Nm2500rpm< 130×130×1712100 130ST-M06025 6 Nm2500rpm130×130×181( 2400
交流伺服电机选型手册
ST系列交流伺服电机型号编号说明? 1: 表示电机外径,单位:mm。? 2:表示电机是正弦波驱动的永磁同步交流伺服电机。? 3:表示电机安装的反馈元件,M—光电编码器,X—旋转变压器。? 4:表示电机零速转矩,其值为三位数×,单位:Nm。? 5:表示电机额定转速,其值为二位数×100,单位:rpm。? 6:表示电机适配的驱动器工作电压,L—AC220V,H—AC380V。? 7:表示反馈元件的规格,F—复合式增量光电编码器(2500 C/T),R—1对极旋转变压器。? 8:表示电机类型,B—基本型。? 9:表示电机安装了失电制动器。 SD系列交流伺服驱动器型号编号说明? 1:表示采用空间矢量调制方式(SVPWM)的交流伺服驱动器? 2:表示IPM模块的额定电流(15/20/30/50/75A)? 3:表示功能代码(M:数字量与模拟量兼容) ●交流伺服电机与伺服驱动器适配表 ST系列电机主要参数 适配驱动器 ST系列电机ST系列电机电机型号额定转矩额定转速额定功率外形尺寸零售价(元) 110ST-M02030 2 Nm3000rpm SD15M SD20MN SD30MN SD50MN SD75MN 110×110×1581500 110ST-M04030 4 Nm3000rpm110×110×1851700 110ST-M05030 5 Nm3000rpm110×110×2001800 110ST-M06020 6 Nm2000rpm110×110×2171900 110ST-M06030 6 Nm3000rpm110×110×2171900 130ST-M04025 4 Nm2500rpm130×130×1631800 130ST-M05025 5 Nm2500rpm130×130×1712100 130ST-M06025 6 Nm2500rpm130×130×1812400 130ST-M07720 Nm2000rpm130×130×1952900 130ST-M07730 Nm3000rpm130×130×1952900 130ST-M1001510 Nm1500rpm130×130×2193200 130ST-M1002510 Nm2500rpm130×130×2193200 130ST-M1501515 Nm1500rpm130×130×2673620 130ST-M1502515 Nm2500rpm130×130×2673620 ST系列交流伺服电机
三菱伺服电机的几种制动方式
三菱伺服电机的几种制动方式 用户往往对电磁制动,再生制动,动态制动的作用混淆,选择了错误的配件。 动态制动器由动态制动电阻组成,在故障、急停、电源断电时通过能耗制动缩短伺服电机的机械进给距离;再生制动是指伺服电机在减速或停车时将制动产生的能量通过逆变回路 反馈到直流母线,经阻容回路吸收;电磁制动是通过机械装置锁住电机的轴。 三者的区别 (1)再生制动必须在伺服器正常工作时才起作用,在故障、急停、电源断电时等情况下无法制动电机。动态制动器和电磁制动工作时不需电源。 (2)再生制动的工作是系统自动进行,而动态制动器和电磁制动的工作需外部继电器控制。
(3)电磁制动一般在SV OFF后启动,否则可能造成放大器过载。动态制动器一般在SV OFF或主回路断电后启动,否则可能造成动态制动电阻过热。 选择配件的注意事项 (1)有些系统如传送装置,升降装置等要求伺服电机能尽快停车。而在故障、急停、电源断电时伺服器没有再生制动无法对电机减速。同时系统的机械惯量又较大,这时需选用动态制动器动态制动器的选择要依据负载的轻重,电机的工作速度等。 (2)有些系统要维持机械装置的静止位置需电机提供较大的输出转矩且停止的时间较长,如果使用伺服的自锁功能往往会造成电机过热或放大器过载。这种情况就要选择带电磁制动的电机。 (3)三菱的伺服器都有内置的再生制动单元,但当再生制动较频繁时可能引起直流母线电压过高,这时需另配再生制动电阻。再生制动电阻是否需要另配,配多大的再生制动电阻可参照样本的使用说明。需要注意的是样本列表上的制动次数是
电机在空载时的数据.实际选型中要先根据系统的负载惯量和样本上的电机惯量,算出惯量比。再以样本列表上的制动次数除以(惯量比+1).这样得到的数据才是允许的制动次数。
伺服电机选型计算
伺服电机选型计算 我将分为四部分为大家介绍伺服电机的选型:一、常见伺服电机的分类二、伺服电机选型的一般流程,注意事项以及改进措施三、西门子伺服电机选型常用的工具以及文档资料四、西门子伺服电机家族以及常见应用的介绍第一部分:问题中提到的伺服电机是一种怎样的电机?伺服电动机又称为执行电动机,在自动控制系统中作为执行元件。按伺服电动机使用电源性质不同,可分为直流伺服电动机和交流伺服电动机。 看了是上面分类,似乎觉得伺服电机跟我们电机学里面的电机分类没什么区别。接下来我说几个伺服电机的特点:往往具有高的转速精度、高的动态响应、非常宽的调速范围、非常高的位置精度,也是由于这些特点决定了伺服电机在应用上与普通电机有一些不同点。第二部分:我以自己最为熟悉同步伺服电机为例,提供一个伺服电机选型的流程。在选用伺服电机时,对电机外部工况我们要关注以下5个因素:1、负载机构(确定机构类型以及其细节数据,如滚珠丝杆长度、滚珠丝杆的直径、行程和带轮直径等)。三种典型的负载机构类型如下图所示: 2、动作模式(决定控制对象部分的动作模式,时间与速度的关系;将控制对象的动作模式换算为电机轴上的动作形式;确定运行模式,包括加速时间(ta)、匀速时间(tu)、减速时间(td)、停止时间(ts)、循环时间(tc)和运动距离(L)等参数)。 3、负载的惯量、转矩和转速(经换算可得到电机轴上的全负载惯量和全负载转矩)。 4、定位精
度(确认编码器的脉冲数是否满足系统要求规格的分辨率)。5、使用环境(如环境温度、湿度、使用环境大气及振动冲击等等)。在进行完以上的计算之后,根据以上的信息我们基本可以进行初步的选定电机然后在选用对应伺服电机规格选用需要关注以下6个方面(这些信息通常会出现在电机的铭牌上,当然选型手册上会有更加全面和细致信息):
电机选型案例
小白进阶篇—电机选型案例集 主讲:小丸子教育—泽雨老师 目的:掌握不同电机在不同工况下的选型问题 课程内容: 1,皮带输送线电机选型 设计要求: 20Kg 物料X 2 传送速度1m/s 加速时间0.15s 已知条件: 摩擦系数=0.2 机械效率=90% 滚子直径=200mm 1. 计算功率 s rad mm s mm mm s m D V T P M N R F T N F F N N N s s m Kg s m K a m f F /102002/10002002/14.282843 1 12131338015.0/120/102.0g 402 =??=??=?=?=?=?==?+==+=?+??=?+=π ππππ)(辊筒辊筒 辊筒 负载负载辊筒皮带拉力负载负载皮带拉力负载ωω
W W W P K P KW r T P M N M N T mm s mm r n n i i T T W s rad M N T P 3823829 .02862.1286.09550 min /14409.115 4.2815200/1000min /1440284/104.28==?=?==?=?=?==?=== =??=?=ηω电机 实际电机电机电机负载电机 传动比 负载电机辊筒负载负载校验:π
设计要求; M=50Kg 运行速度1m/s 加速时间0.25s 直线导轨摩擦系数0.1 带轮直径100mm [] N s m Kg s s m Kg s m Kg a m g m F 250/)25 .01 5010501.0(25.0/150/10501.02 2 =??+??=? +??=?+??=μ负载
PARKER伺服电机SMN选型手册
High-Torque Design, Compact Package Parker’s SMN series of rotary servo motors combines a high-performance segmented stator design with competitive pricing for today’s demanding servo applications. The modern eight-pole segmented stator architecture produces extremely high torque values for a given motor volume. The SMN motor family is offered in frame sizes ranging from 60 mm to 142 mm and is available with resolver, quadrature encoder or high-resolution SinCos feedback devices.SMN Motor Features ? High performance per dollar ? High torque density package ? 1.4 – 14.5 N-m continuous torque range ? Brushless construction ? Resolver, encoder or SinCos (absolute) feedback ? Five frame sizes from 60 mm to 142 mm ? IP64 standard ? IP65 option Motor Part Numbering System Series SMN -SMN Family Frame 060 - 60mm 082 - 82mm 100 - 100mm 115 - 115mm 142 - 142mm Stack 2 Winding P Q S T V Z Feedback Type Feedback Resolution 41 - Resolver, single speed 2F - Quadrature encoder, 2048 line 5D - SinCos w/ Hiperface? absolute encoder (Stegmann) Shaft K - Keyway Connector P - PS style Options N - None B - Holding brake V - IP65 (shaft seal)
伺服电机如何进行选型知识讲解
伺服电机选型技术指南 1、机电领域中伺服电机的选择原则 现代机电行业中经常会碰到一些复杂的运动,这对电机的动力荷载有很大影响。伺服驱动装置是许多机电系统的核心,因此,伺服电机的选择就变得尤为重要。首先要选出满足给定负载要求的电动机,然后再从中按价格、重量、体积等技术经济指标选择最适合的电机。 各种电机的T-ω曲线 (1)传统的选择方法 这里只考虑电机的动力问题,对于直线运动用速度v(t),加速度a(t)和所需外力F(t)表示,对于旋转运动用角速度ω(t),角加速度α(t)和所需扭矩T(t)表示,它们均可以表示为时间的函数,与其他因素无关。很显然。电机的最大功率P电机,最大应大于工作负载所需的峰值功率P峰值,但仅仅如此是不够的,物理意义上的功率包含扭矩和速度两部分,但在实际的传动机构中它们是受限制的。用ω峰值,T峰值表示最大值或者峰值。电机的最大速度决定了减速器减速比的上限,n上限=ω峰值,最大/ω峰值,同样,电机的最大扭矩决定了减速比的下限,n下限=T峰值/T电机,最大,如果n下限大于n上限,选择的电机是不合适的。反之,则可以通过对每种电机的广泛类比来确定上下限之间可行的传动比范围。只用峰值功率作为选择电机的原则是不充分的,而且传动比的准确计算非常繁琐。 (2)新的选择方法 一种新的选择原则是将电机特性与负载特性分离开,并用图解的形式表示,这种表示方法使得驱动装置的可行性检查和不同系统间的比较更方便,另外,还提供了传动比的一个可能范围。这种方法的优点:适用于各种负载情况;将负载和电机的特性分离开;有关动力的各个参数均可用图解的形式表示并且适用于各种电机。因此,不再需要用大量的类比来检查电机是否能够驱动某个特定的负载。 在电机和负载之间的传动比会改变电机提供的动力荷载参数。比如,一个大的传动比会减小外部扭矩对电机运转的影响,而且,为输出同样的运动,电机就得以较高的速度旋转,产生较大的加速度,因此电机需要较大的惯量扭矩。选择一个合适的传动比就能平衡这相反的两个方面。通常,应用有如下两种方法可以找到这个传动比n,它会把电机与工作任务很好地协调起来。一是,从电机得到的最大速度小于电机自身的最大速度ω电机,最大;二是,电机任意时刻的标准扭矩小于电机额定扭矩M额定。
伺服电机与减速机分别怎么选取
伺服电机与减速机分别怎么选取 伺服电机选型: 转速(根据需要选择) 转矩(根据负载结构和重量以及转速计算需要伺服电机需要输出的力矩) 转动惯量(此参数关系伺服在机械结构上的运行精度,通过负载结构重量计算) 一般都要留有一定余量,即安全系数。 通过此三个参数结合选型样本来选择伺服电机的型号。 减速机选型: 减速比(根据电机的转速与最终需要输出的转速之比以及最终需要输出的转矩与电机转矩之比以及机械转动惯量与电机的转动惯量之比的开方来最终确定) 额定承载扭矩(最终的输出扭矩不要大于减速机的额定扭矩,与减速机寿命有关) 精度(根据用户需要选择适当的精度要求) 安装配合尺寸(负载与减速机之间的配合安装以及电机与减速机之间的配合安装等根据产品图纸来确定) 上述便是如何选伺服电机和减速机的一般要确定的参数。希望帮助到你。 追问 减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数 这里的使用系数怎么确定,大概的怎么确定,选的值与实际偏离的不会太多! KF系列精密伺服减速机 具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外观美观、安装方便、定位精准等特点。适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。适合于全球任何厂商所制造的驱动产品连接,如:松下、台达、安川、富士、三菱、三洋、西门子、施耐德、法那克、科比、科尔摩根、AMK、帕克等等 KF系列精密伺服行星减速机: 为方形法兰设计,安装尺寸简单方便。型号分:KF40、KF60、KF90、KF120、KF160、KF200等常用机座型号。速比:4~1000有20多种比速可选择;分一、二、三减速传动;精度:一级传动精度在5-10弧分,二级传动精度在7-12弧分;三级传动精度在9-15弧分;有数百种规格。 应用领域: 伺服行星减速机可直接安装到交流和直流伺服马达上,广泛应用于中等精度程度的工业领域。如:精密机床、焊接设备、自动切割设备、包装设备,太阳能、工业机器人、医疗设备、印刷设备、精密测试仪器等自动化数控设备的应用。 性能和特点: KF系列精密伺服行星减速机提供了高性价比,应用广泛、经济实用、寿命长等优点,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的定位控制,在运转平台上具备了中低背隙,高效率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。使用终身免更换的润滑油,及无论安装在何处,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时
伺服电机原理及选型[1]
什么是伺服电机? 伺服电机:是在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。伺服电机是可以连续旋转的电-机械转换器。作为液压阀控制器的伺服电机,属于功率很小的微特电机,以永磁式直流伺服电机和并激式直流伺服电机最为常用。 伺服电机的作用:伺服电机可使控制速度,位置精度非常准确。 伺服电机的分类:直流伺服电机和交流伺服电机。 直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。具有起动转矩大,调速范围宽,机械特性和调节特性的线性度好,控制方便等优点,但换向电刷的磨损和易产生火花会影响其使用寿命。近年来出现的无刷直流伺服电机避免了电刷摩擦和换向干扰,因此灵敏度高,死区小,噪声低,寿命长,对周围电子设备干扰小。 直流伺服电机的输出转速/输入电压的传递函数可近似视为一阶迟后环节,其机电时间常数一般大约在十几毫秒到几十毫秒之间。而某些低惯量直流伺服电机(如空心杯转子型、印刷绕组型、无槽型)的时间常数仅为几毫秒到二十毫秒。 小功率规格的直流伺服电机的额定转速在3000r/min以上,甚至大于10000r/min。因此作为液压阀的控制器需配用高速比的减速器。而直流力矩伺服电机(即低速直流伺服电机)可在几十转/分的低速下,甚至在长期堵转的条件下工作,故可直接驱动被控件而不需减速 直流伺服电机分为有刷和无刷电机。 有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。 无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。 交流伺服电机也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。 交流伺服电机的工作原理
伺服电机和减速机选型
1)确认你的负载额定扭矩要小于减速机额定输出扭矩。 2)伺服电机额定扭矩(乘以)x减速比要大于负载额定扭矩。 3)负载通过减速机转化到伺服电机的转动惯量,要在伺服电机允许的范围内。 4)确认减速机精度能够满足您的控制要求。 5)减速机结构形式,外型尺寸既能满足设备要求,同时能与所选用的伺服电机连接。 除了减速机传动比,输出转矩,输出轴的轴向力,径向力校核;还要看减速机的传动精度,根据工作条件选择。因为传动精度高价格高,只要电机和减速机配套后满足你的要求(功能和性能),就可以了。 配减速机可以提高扭矩,但是速度下降,所以是否配减速机要综合考虑速度及扭矩两个方面,如移载机上,常见的有以下两种驱动方式:(通过计算得到伺服电机的功率大致合理的范围,不能造成浪费,所以两种驱动方式的电机功率相差不大) A:靠滚珠丝杆传动,伺服电机不配减速机的情况下扭矩就可以满足要求,速度也能满足;配减速机后扭矩的就更大了(造成浪费),但是速度却不能满足,所以一般不配减速机; 伺服电机选型: 转速(根据需要选择) 转矩(根据负载结构和重量以及转速计算需要伺服电机需要输出的力矩) 转动惯量(此参数关系伺服在机械结构上的运行精度,通过负载结构重量计算) 一般都要留有一定余量,即安全系数。 通过此三个参数结合选型样本来选择伺服电机的型号。 减速机选型: 减速比(根据电机的转速与最终需要输出的转速之比以及最终需要输出的转矩与电机转矩之比以及机械转动惯量与电机的转动惯量之比的开方来最终确定) 额定承载扭矩(最终的输出扭矩不要大于减速机的额定扭矩,与减速机寿命有关) 精度(根据用户需要选择适当的精度要求) 安装配合尺寸(负载与减速机之间的配合安装以及电机与减速机之间的配合安装等根据产品图纸来确定) 上述便是如何选伺服电机和减速机的一般要确定的参数。希望帮助到你。 减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数 这里的使用系数怎么确定,大概的怎么确定,选的值与实际偏离的不会太多! D KF系列精密伺服减速机 时间: 2016-08-16 16:21 点击: 4132 次
伺服电机选型手册
博美德乮广州乯数控设备有限公司联系人丗付先生电话丗134******** BONMET SA Smart & Accurate BONMET SERVO SYSTEM 性能卓越●多合一控制方式 利用参数切换可分别使用:①位置控制;②速 度控制;③转矩控制;④JOG控制;⑤点对点 控制。 ●单轴定位功能
SA系列伺服驱动器内置了16节点的单轴定位功能,用户可以通过伺服驱动器的RS-232通 讯接口直接与触摸屏连接,从而省却了中间的PLC单元。 ●伺服系统分析功能 博美德伺服驱动器专用计算机软件Servofly,能对所有参数进行编辑、传送、比 较以及初始化,监控所有信号、报警、系统状态等,功能强大,操作便捷。 种类齐全●与机器匹配的伺服电机种类齐全 博美德伺服电机现在拥有27种不同型号,适 用面广泛,并且我们仍在不断开发新型产品。 ●多种配套类型伺服驱动器 博美德伺服驱动器拥有SA系列和SL系列2 个系列,现已涵盖0.4KW至5.5KW的多种类型驱动器,广泛运用于各种工业环境。 质量保证●伺服电机 选用高工作温度、高磁能积优质的永磁材料做成,使用优化的电磁参数设计,电机长期运行
时仍能保持优良的工作状态,IP65的防护等 级,特别适用于工业环境。 ●伺服驱动器 采用德国进口模块,专业的系统设计,先进的 PID控制算法,能与电机参数实现无缝联接, 使产品性能达到最佳效果。●控制软件 ●型号说明 ●适配类型 ●SM系列伺服电机●ML系列一体机 ●伺服驱动器规格●伺服驱动器连接图●伺服产品选件Contents ● 控制软件—Servofly Servofly 是Bonmet Motion GmbH 独立研 发的 SA
伺服电机及选型
伺服电机及选型 GE GROUP system office room 【GEIHUA16H-GEIHUA GEIHUA8Q8-
伺服电机 伺服电机(servomotor)是指在伺服系统中控制机械元件运转的发动机。伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。 “伺服”一词源于希腊语“奴隶”的意思,“伺服电机”可以理解为绝对服从控制信号指挥的电机:在控制信号发出之前,转子静止不动,当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。因此伺服电机指的是随时跟随命令进行动作的一种电机,是以其工作性质命名的。 伺服主要靠脉冲来定位,伺服电机接收到一个脉冲就会旋转一个脉冲对应的角度,从而实现位移。伺服本身带有编码器,具备发出脉冲的功能,所以伺服电机每旋转一个角度,就会发出对应数量的脉冲。等于是把电机旋转的详细信息反馈回去,形成闭环。这样的话,系统就会知道发了多少脉冲给电机,同时又收了多少脉冲回来,这样就能很精准的控制电机的转动,实现非常精准的定位。 一、伺服电机分类 1、直流伺服 结构简单控制容易。但从实际运行考虑,直流伺服电动机引入了机械换向装置,成本高,故障多,维护困难,经常因碳刷产生的火花影响生产,会产生电磁干扰。而且碳刷需要维护更换。机械换向器的换向能力,也限制了电动机的容量和速度。
2、交流伺服 分为永磁同步伺服电机和异步伺服电机。目前运动控制基本都用同步电机。 永磁同步伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。特点如下: 1、控制速度非常快,从启动到额定转速只需几毫秒;而相同情况下异步电机却需要几秒钟。 2、启动扭矩大,可以带动大惯量的物体进行运动。 ? 3、功率密度大,相同功率范围下相比异步电机可以把体积做得更小、重量做得更轻。 ? 4、运行效率高。 ? 5、可支持低速长时间运行。 ? 6、断电无自转现象,可快速控制停止动作。 7、控制和响应性能比异步伺服电机高很多。 二、伺服电机计算 2.1、电机转矩
三菱伺服系统型号及功能参数
三菱伺服系统型号及功能参数三菱伺服系统型号大全 MR-J2S系列 伺服电机伺服驱动器 HC-KFS13 /MR-J2S-10A HC-KFS23 /MR-J2S-20A HC-KFS43 /MR-J2S-40A HC-KFS73 /MR-J2S-70A HC-SFS52 /MR-J2S-60A HC-SFS102 /MR-J2S-100A HC-SFS152 /MR-J2S-200A HC-SFS202 /MR-J2S-200A HC-SFS352 /MR-J2S-350A HC-SFS502 /MR-J2S-500A HC-SFS702 /MR-J2S-700A MR-J3系列 HF-KP13 /MR-J3-10A HF-KP23 /MR-J3-20A HF-KP43 /MR-J3-40A HF-KP73 /MR-J3-70A
HF-SP52 /MR-J3-60A HF-SP102 /MR-J3-100A HF-SP152 /MR-J3-200A HF-SP202 /MR-J3-200A HF-SP352 /MR-J3-350A HF-SP502 /MR-J3-500A HF-SP702 /MR-J3-700A MR-E系列 HF-KE13 /MR-E-10A HF-KE23 /MR-E-20A HF-KE43 /MR-E-40A HF-KE73 /MR-E-70A HF-SE52 /MR-E-70A HF-SE102 /MR-E-100A HF-SE152 /MR-E-200A HF-SE202 /MR-E-200A 伺服器:三菱伺服:MJ-J2 MR-S2 MR-S3 MR-H MR-JXXA MDS-B-SP MDS-C1-CV MDS-B-CV MDS-B-V1 MDS-B-V2 MDS-C1-V24 MR-B-SVJ2 MR-A-CV MDS-A-CR MDS-B-CVE MR-SB FR-SF-2 MR-SA MDS-B-V14L FR-SGJ-2 FR-CV FCVA-MP10 FANUC 三菱伺服电机的分类
伺服电机选型
伺服电机的选型(丝杠滑台传动方式电机选型) 直线导轨的摩擦系数0.002~0.003,25规格以下以0.02~0.03计,30~45规格以0.03~0.05计,55~65规格以0.05~0.08计,65以上以0.08~0.1计。 工件:质量15g 共225个 总质量:3.375Kg 盘子质量:13.02Kg 体积:mm 6106585.1? 承载盘质量:12.348Kg 体积:3610347.3mm ? 纵向导轨支撑上的总载荷:28.743Kg 光轴导轨的摩擦系数:0.03 丝杠的工作载荷F =N 8792.703.08.98.26=?? 联轴器 选择型号LS10-32 外径为32φ,内径为14φ,惯量3103.8-?2m kg ?,质量约为46g 惯量比是用电机的转动惯量去除负载惯量的数值,按照通常标准,750w 以下的电机为20倍以下 1.下料系统的各个参数 滚珠丝杠上需要带动的总载荷 743.28=A W (Kg) 滚珠丝杠的长度 2.1=L B (m) 滚珠丝杠的直径 02.0=D B (m) 滚珠丝杠的螺距 02.0=P B (m) 滚珠丝杠效率 9.0=ηB 移动距离 0.8(m) 联轴器的惯量 () 662232210015.710143210468 1)(81---?=?+???=+=d D W J C 2m kg ? 2.运转模式 加速时间 1.0=a t (s) 匀速时间 8.1=a t (s) 减速时间 1.0=d t (s) 循环时间 4=c t (s) 移动距离 0.8(m) 3.滚珠丝杠的质量 98.22.1202.0109.722 32=???? ????=??? ????=ππρL D W B B B (kg) 4.负载部分的惯量 22481π P A D W C B C L B W B B J J J J +?+=+= 22 26 402.0743.2802.098.28110015.7π??+??+?=- 4104927.4-?= (k g ·m 2) 5.预选电机