相位问题

有兴趣进一步可参考潘立超、翁泰来先生等发表的《音响系统的相位、群延时失真及测量》一文,相信会更深入地了解“相位”这个神话了的名词。下面我们一步步地剥去这个“相位”的遮羞布。
在一个理想的线性系统中,如果我们定义输出对输入信号没有发生任何形变及时间的延时,则这个系统的幅频和相频曲线都是平直的。具体表现为幅频曲线为(通过0dB的)水平直线,相频曲线为通过0度的水平直线。
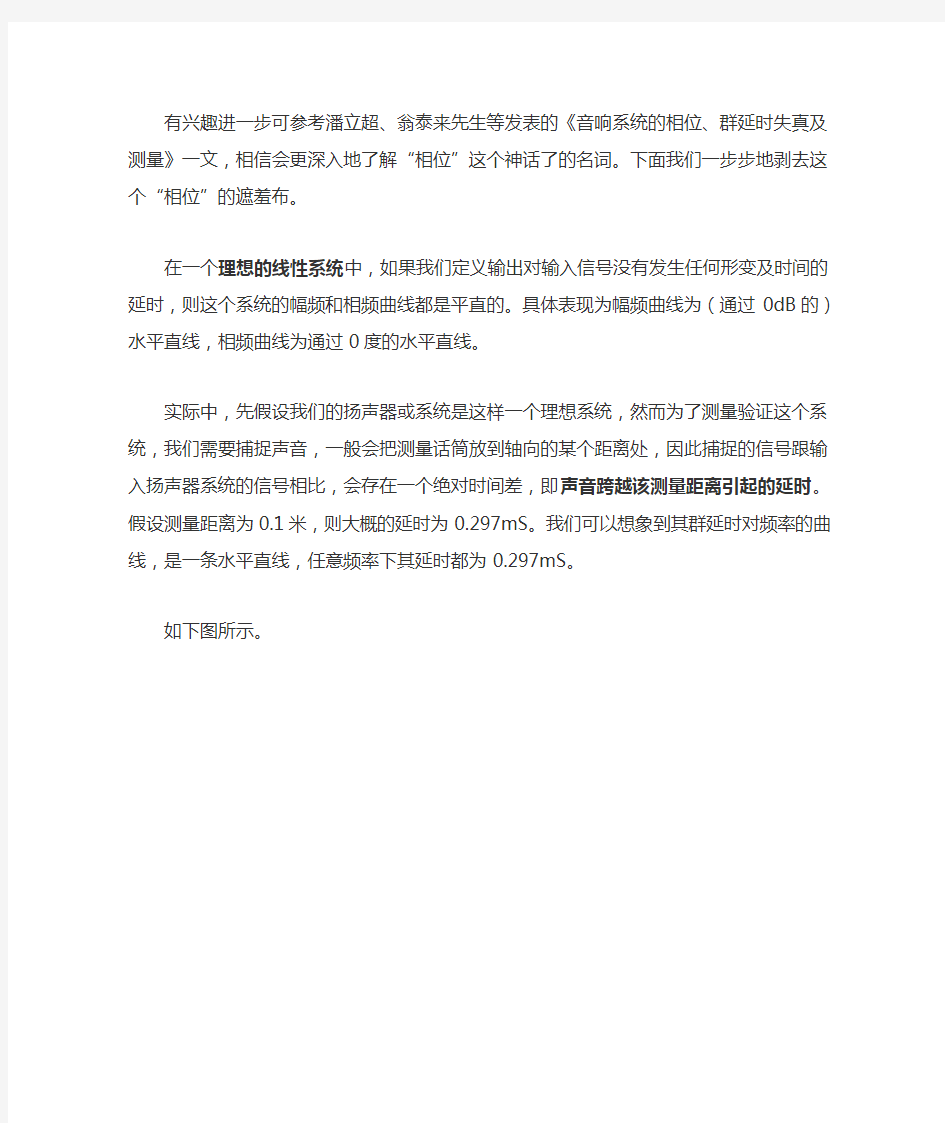
实际中,先假设我们的扬声器或系统是这样一个理想系统,然而为了测量验证这个系统,我们需要捕捉声音,一般会把测量话筒放到轴向的某个距离处,因此捕捉的信号跟输入扬声器系统的信号相比,会存在一个绝对时间差,即声音跨越该测量距离引起的延时。假设测量距离为0.1米,则大概的延时为0.297 mS。我们可以想象到其群延时对频率的曲线,是一条水平直线,任意频率下其延时都为0.297mS。
如下图所示。
根据这条延时与相位、频率的关系,可以转换出以下的相频曲线:
乍一看,原来延时对频率是水平直线,怎么到相位这里却变成这样?首先由于测量延时,会在相频曲线中在原系统特性的基础上叠加了由于延时带来的线性相位移,这个相位的具体变化值视测量距离和声波波长而定。另一个原因造成了相频曲线看起来象锯齿一样:那就是这个相位图描绘的是相位的主值,其数值被限制在正180度到-180度之间,超出的自动减去或加上360度,因此很容易形成如图的锯齿形状。但我们可以根据相位的连续性来展开这个图,得到所谓的“绝对相位”图,此处略去。我们还可以验证一下,由于测量距离为0.1米,与此距离等长的声波频率为3440Hz,因此针对此频率的相位移刚好就是360度,其相位主值为360-360=0度,因此上图的相位主值曲线中,第一个对应0度的频率就是3440Hz。
对于这样恒定延时的系统,无论你在系统中输入多个或者单个信号,也无论你的测量距离有多远,信号之间的相位关系其实都能保持不变。因此,在考虑信号波形还原的时候,能反映真实情况的是群延时曲线,而相位曲线由于通常会叠加了线性相位移而变得不那么直观。当然两者是息息相关的。
为了在相位曲线上更好地观察,需要对上面的进行线性相移修正,即减去群延时造成的相位偏移。
下图是一个模拟的扬声器系统的测量结果,包括幅频和相频特性(相频的参考0度点是扬声器输入电压)。
在这里我们可以看到,相位曲线中难于观测到真正存在的问题,进行线性相移修正后得到的相位曲线可称作相对相移曲线,如下图就是:
此图能较地表达该扬声器系统内在的相位波动。
在测量中,会因为施加了不同的线性相移修正(即不同的延时时间)而得到不同的结果,问题恰好就是现实测量中很难准确地获取真实的延时时间值--首先我们无法很准确地测量出测量话筒和发声体声中心的真实距离;另一个问题是,就算我们有准确的距离,但由于气温随时波动而造成声速的波动,因此我们也无法准确测量出声波越过这段距离所需要的时间。
由于上面的原因我们在观察相对相移曲线时就要特别小心,下面是对一个2分频系统的进行不同的线性相移修正后得到的频响和相对相移曲线:
此主题相关图片如下:未命名.gif
图1
两个曲线在视觉上,特别是中高频部分的差异蛮大,因此需要细心地匹配延时时间,并对结果进行仔细的分析。
怎么能获取更准确的延时时间呢?我们先从扬声器单元的测量所起:
研究表明,在一般情况下,扬声器单元本身可以当作最小相位系统,(对于这个最小相位系统的理解可以参考《信号与系统》等其它书籍,这里不多作讨论)最小相位系统,其不带群延时的相频特性可以由其幅频经希伯特转换而得到。大家用过LMS测量系统就知道,其提供的相频曲线,其实就是经幅频曲线转换出
来的。无论喇叭测量时是正接还是反接,在LMS中,如果幅频特性如下图2A,则经希伯特转转换出来的相频特性就如下图2A的虚线。
图2A
为了更好地理解,这里的单元都是理想化了,因此没有实际单元那些波动的小峰谷。而实际单元幅频上的小峰谷,在相频上也有波动跟其对应。
当这个喇叭正接的时候,我们可以看到在100mm外测量到的相频曲线如下图2B,
图2B
这样,如果按距离100mm进行线性相移修正,则得到图2A的曲线,如果这个单元是反接的,测量的实际结果如图2C:
图2C
同样经过线性相移修正,得到的曲线跟图2A相比,刚好是反相,如图2D:
此主题相关图片如下:
图2D
这里用实际来表明,经希伯特转转换的相位特性,与测量距离无关、与单体测量时候的绝对相位(正负极接法)无关。也就是说无法反映绝对相位及测量距离引起的线性相移。
但如果我们使用其它的测量系统(能反映真实的相位),我们也无法立刻确定测量距离及延时,原因前面已经提到,即:
1、测量距离难以精确。对测量距离的判断:我们究竟是以单元安装面板到测量MIC的距离为准,还是以音圈位置到MIC的距离为准?
2、声速无法准确测量以计算出延时时间。
说到头,到底我们有什么方法来减去真正的延时时间呢?特别是如何确定测量距离?
(注意,以下的假设跟上面不再相同,为了确定测量距离,我们假定声速不变化)我们先假设得到的测量结果是图2B,通过该幅频特性,经希伯特转换得到图2A的最小相频特性。假设单元的安装面板跟测量MIC的实际距离经量度得到是98mm,则我们在图2B的基础上减去98mm测量距离得到的相位误差,得到图3A:
图3A
仔细对比图3A和图2A,我们发现两者并不完全相同。在20kHz的时候,图2A是126度,图3A是83度,两者相差43度,对于20k的声波长来说,其对应的长度为43/360 * 340/20000=2mm,也就是说,目前还有2mm左右的测量距离还没有减去。OK,我们在2B的基础上减去(98+2)mm的距离,则得到了跟2A一样的结果。
这时候,反映在物理上的问题就是,虽然我们物理上量度到的面板和测量话筒之间的距离是98mm,但实际上我们要减去100mm的测量距离方能真正达到减去所有测量延时引起的相位差异。我们称这个2 mm是额外减去的。而且这时候,我们可以说,这个单元的声中心就在单元安装面板的2mm后。
这个声中心是一个虚拟的点,在此点上,单元遵循最小相位系统的特性。
然而如果我们考虑到声速可能随时在波动,那就出现了“测不准”的情况了,我们无法有足够的精度去测量并计算出声中心的位置。
针对整个系统而言,由于系统通常由几路单元经分频器后再合成,通常这时就不成为最小相位系统了(理想情况下仅有少数几种分频器能使合成后仍视作最小相位系统)。针对这种系统的测量,我们要观察其相
对相位特性,就更需要仔细分析和匹配数据,以免出现图1中那种情况,给测量结果误导了。
相位恢复问题研究
Pure Mathematics 理论数学, 2019, 9(3), 330-335 Published Online May 2019 in Hans. https://www.360docs.net/doc/ff7868910.html,/journal/pm https://https://www.360docs.net/doc/ff7868910.html,/10.12677/pm.2019.93044 Research on Phase Retrieval Problem Gan Gong, Huimin Wang*, Qian Wu, Yunyang Lu Department of Applied Statistics, Shaoxing University, Shaoxing Zhejiang Received: Apr. 23rd, 2019; accepted: May 3rd, 2019; published: May 15th, 2019 Abstract Phase retrieval is an important issue in the field of engineering physics, studying how to estimate a signal from its Fourier transform magnitude. Generally speaking, this problem is ill-posed. Therefore, to recover the signal accurately, some a priori information of the signal is needed. Very rich research results have emerged in the phase recovery problem. This paper will review the lat-est theories and algorithms of sparse phase recovery. Keywords Sparsity, Phase Retrieval, Iterative Algorithm, Nonconvex Optimization 相位恢复问题研究 龚敢,王会敏*,邬谦,卢云洋 绍兴文理学院,应用统计系,浙江绍兴 收稿日期:2019年4月23日;录用日期:2019年5月3日;发布日期:2019年5月15日 摘要 相位恢复问题是工程物理领域的一个重要的问题,研究如何从一个傅立叶测量的模中估计一个信号。一般来说,这个问题是病态的,因此,要准确恢复信号,需要信号的一些先验信息。关于相位恢复问题已经涌现了非常丰富的研究成果,本文将对稀疏相位恢复问题最新的理论和算法进展进行综述。 关键词 稀疏性,相位恢复,迭代算法,非凸优化 *通讯作者。
偏振光干涉中的相位
偏振光干涉中o 光和e 光的相位 以课件上的问题为例: 设单色平面光波沿z 方向传播,即k //z : 1. 在偏振片P 1之后,晶片C 之前的光场是: )2cos(11z t e A E P λ πω?=r r 现在事先把它分解为o 光和e 光: )2cos( )()2cos()(11e e 1o o 1z t e e e A z t e e e A E P P λ πωλπω??+??=r r r r r r r (1) 这里1P e r 是沿偏振片P 1的偏振方向的单位矢量,o e r 和e e r 是o 光和e 光偏振方向的单位矢量,。上图表示出了所有的单位矢量,它们都在x -y 平面内。原则上讲,这些单位矢量的方向是可任意规定的,影响的只是它们之间点积的正负,但为了保证现在的o 光和e 光没有相位差,即cos 函数内不出现π(如果o e r 沿图中的反方向定义, 就会引起这个π),则o e r 、e e r 与1P e r 应保持上图所示关系。在上图的规定中,αcos )(1e =?P e e r r ,αsin )(1o =?P e e r r 。 2. 在晶片C 之后,偏振片P 2之前的光场是: )2cos()()2cos()(11e e 1o o 1z t e e e A z t e e e A E P P λ πωδλπω??++??=r r r r r r r (2) 与(1)式不同的是,(2)式中的o 光和e 光有了相位差δ,这是由晶片引起的。这时一般 y z k x
合成为椭圆偏振光。 3. 在偏振片P 2之后的光场是(对o 光和e 光,只有沿P 2方向的分量可通过): ) 2cos())(()2cos())((212212e e 1o o 1z t e e e e e A z t e e e e e A E P P P P P P λπωδλπω???++???=r r r r r r r r r r r 这时的情况是:振动都沿同方向-2P e r 方向的、相差恒定的两个波叠加,故可产生干涉。 具体分析相位,除了由晶片引起的δ,还存在可能由光矢量分解引起的π,表现在)(2o P e e r r ?和)(2e P e e r r ?差负号。在上面的情形中,的确引入了π的相位差。
相位差
相位差 两个频率相同的交流电相位的差叫做相位差,或者叫做相差。 这两个频率相同的交流电,可以是两个交流电流,可以是两个交流电压,可以是两个交流电动势,也可以是这三种量中的任何两个。 两个同频率正弦量的相位差就等于初相之差.是一个不随时间变化的常数. 任意一个正弦量y = A sin(wt+ j0)的相位为(wt+ j0),本章只涉及两个同频率正弦量的相位差(与时间t无关)。设第一个正弦量的初相为j01,第二个正弦量的初相为j02,则这两个正弦量的相位差为 j12 = j01 - j02 并规定 在讨论两个正弦量的相位关系时: (1) 当j12> 0时,称第一个正弦量比第二个正弦量的相位越前(或超前) j12; (2) 当j12< 0时,称第一个正弦量比第二个正弦量的相位滞后(或落后)| j12|; (3) 当j12 = 0时,称第一个正弦量与第二个正弦量同相,如图7-1(a)所示; (4) 当j12 = ±p 或±180°时,称第一个正弦量与第二个正弦量反相,如图7-1 (b)所示; (5) 当或±90°时,称第一个正弦量与第二个正弦量正交。 例如已知u= 311sin(314t- 30°) V,I= 5sin(314t+ 60°) A,则u与i的相位差为 jui= (-30°) - (+ 60°) = - 90°,即u比i滞后90°,或i比u超前90°。 相位差的取值范围和初相一样,小于等于π(180°).对于超出范围的,同样可以用加减2Nπ来解决. 例如,研究交流电路的相位差.如果电路含有电感和电容,对于纯电容电路电压相位滞后于电流(电压滞后电流多少度也可以表述成电流超前电压多少度),纯电感电路电流相位滞后于电压,滞后的相位值都为圆周率的一半,或者说90°.在计算电路电流有效值时,电容电流超前90 ,电感落后90,可用矢量正交分解加合. 加在晶体管放大器基极上的交流电压和从集电极输出的交流电压,这两者的相位差正好等于180°.这种情况叫做反相位,或者叫做反相. 正弦量正交(90°)和反相(180°)都是特殊的相位差. 若发电机组在小负荷下运行,随着运行时间的延续,会出现以下故障: 1、活塞汽缸套密封不好,机油上窜,进入燃烧室燃烧,排气冒蓝烟。 2、对于增压式柴油机,由于低载、空载,增压压力底,容易导致增压器油封(非接触式)的密封效果下降,机油窜入增压室,随同进气进入气缸。 3、上窜至气缸的一部分机油参与燃烧,一部分机油不能完全燃烧,在气门、进气道、活塞顶、活塞环等处形成积炭,还有一部分随排气排出。这样,其缸套排气道内就会逐步积聚机油,也会形成积炭。 4、增压器的增压室内机油积聚到一定程度,就会从增压的结合面处渗漏出。
GPS天线相位中心消除偏差方法
GPS天线相位中心消除偏差方法 【摘要】本文介绍了GPS接收机相位中心的确定方法和如何减小相位中心偏差的方法,对提高GPS测量精度有一定的作用。该方法在实际应用中已取得了理想的效果。 【关键词】GPS;相位中心;偏差 1.引言 在GPS测量过程中,我们所得到的观测值都是以GPS接收机天线的相位中心位置为准的.而天线的相位中心与其几何中心.在理论上保持一致。可实际上接收机天线的相位中心是随着信号输入的强度和方向不同而时刻变化的,即观测时相位中心的瞬时位置与理论上的相位中心位置将有所不同,这种差别叫天线相位中心的位置偏差,它的影响可达数毫米至数厘米。因此.研究天线相位中心及其变化,找到减小这种偏差的方法,对GPS高精度测量有着重要的意义。 2.GPS天线的相位中心的确定 GPS接收机的相位中心.也就是通常所说的GPS接收机的电气中心,它是一台测量仪的基准点,研究GPS接收机的相位中心的变化规律,是提高测量精度的重要环节。 2.1机内时延 GPS接收机为了使用方便,一般都是天线与主机分开,它们之间通过一根具有一定长度的同轴电缆连接.当信号进入天线经放大、电缆传输、再放大、直到相关解调,于是便有了一个时延,这就是机内时延。
2.2GPS天线的相位中心的确定 在GPS测量过程中.我们一般都是把GPS接收机的天线放在标志点上,通常以天线上表面中心作为GPS接收机的相位中心,而实际上并不是这样。我们知道.GPS接收机在工作时需要同时接收四颗以上GPS卫星信号进行放大、传输、相关解调、运算.求出时间、位置、速度、方向等参数。相关解调点是指卫星信号到GPS接收机时延的参考点,对于每一颗卫星信号而言,相关解调点是测量的参考点(或起算点)。如此看来GPS接收机的相位中心不在天线上,具体在哪?分析如下: 总路程
相位误差
频率误差定义: 发射机的频率误差是指测得的实际频率与理论期望的频率之差。它是通过测量手机的I/Q信号并通过相位误差做线性回归,计算该回归线的斜率即可得到频率误差。频率误差是唯一要求在衰落条件下也要进行测试的发射机指标。测试目的:通过测量发射信号的频率误差可以检验发射机调制信号的质量和频率稳定度。频率误差小,则表示频率合成器能很快地切换频率,并且产生出来的信号足够稳定。只有信号频率稳定,手机才能与基站保持同步。若频率稳定达不到要求(0.1ppm),手机将出现信号弱甚至无信号的故障,若基准频率调节范围不够,还会出现在某一地方可以通话但在另一地方不能正常通话的故障。 条件参数: GSM频段选1、62、124三个信道,功率级别选最大LEVEL5;DCS频段选512、698、885三个信道,功率级别选最大LEVEL0进行测试。GSM频段的频率误差范围为+90HZ 90HZ,频率误差小于40HZ时为最好,大于40HZ小于60HZ时为良好,大于60HZ小于90HZ时为一般,大于90HZ时为不合格;DCS频段的频率误差范围为+180HZ 180HZ,频率误差小于80HZ 时为最好,大于80HZ小于100HZ时为良好,大于100HZ小于180HZ时为一般,大于180HZ 时为不合格。 相位误差(GMSK)和频率误差是用于表征GSM手机调制质量的两个重要参数。相位误差的测量能反映出发射器电路中I/Q基带信号发生器、滤波器、调制器和放大器等部分的问题,在实际系统中,太大的相位误差会使接收器在某些边界条件下无法正确解调,这最终会影响工作频率范围。频率误差的测量能够反映出合成器/锁相环等部分的性能。频率误差过大反映出当信号发送时存在频率转换,合成器不能快速识别信号。在实际系统中,频率误差过大会造成接收器无法锁定频率,最终导致和其他手机之间相互干扰。 在欧洲GSM的电信标准中规定:相位误差的峰值不得大于20度、有效值不得大于5度。当相位误差指标有问题时,轻则会影响话音质量(失真度变大或有咯咯声)、严重时则会使手机脱离GSM服务网。 相位误差 1 引言 gsm手机不论是在研发、生产还是在维修中,有四项rf电气指标肯定是必须测量的,其中有三项是发射指标,即:射频输出功率、频率误差、相位误差,还有一项是接收指标即灵敏度。相位误差(pe)是一项非常重要的指标。在欧洲gsm的电信标准中规定:pe的峰值不得大于20度、有效值不得大于5度。当pe指标有问题时,轻则会影响话音质量(失真度变大或有咯咯声)、严重时则会使手机脱离gsm服务网。 2 pe的定义 要想提高某项指标的水平,首先是必须了解那一项指标的定义。Pe的定义是:它是指I路(同相)与Q路(正交)之间的相位平衡度(phase balance),换句话说即是:I与Q之间的正交性误差(quadrature error)。若某一时刻Pe的采样点设为Pe (j),根据欧洲电信标准GSM11.10则有: MAX {Pe (j)} ≤20º RMS {Pe (j) } = {∑nj =1Pe2 (j)/n}1/2 ≤5º , J=1,2,3,… n,n≥294 (1) GSM手机综测仪在测量和计算Pe时,采样时间一般取当前的10个突发(burst)长度(一个burst 长度等于577微秒)。
相位解缠算法研究
一、引言 合成孔径雷达干涉测量技术(synthetic aperture radar interferometry, InASR)将合成孔径雷达成像技术与干涉测量技术成功地进行了结合,利用传感器高度、雷达波长、波束视向及天线基线距之间的几何关系,可以精确的测量出图像上每一点的三维位置和变化信息。 合成孔径雷达干涉测量技术是正在发展中的极具潜力的微波遥感新技术,其诞生至今已近30年。起初它主要应用于生成数字高程模型(DEM)和制图,后来很快被扩展为差分干涉技术( differential InSAR , DInSAR)并应用于测量微小的地表形变,它已在研究地震形变、火山运动、冰川漂移、城市沉降以及山体滑坡等方面表现出极好的前景。特别,DInSAR具有高形变敏感度、高空间分辨率、几乎不受云雨天气制约和空中遥感等突出的技术优势,它是基于面观测的空间大地测量新技术,可补充已有的基于点观测的低空间分辨率大地测量技术如全球定位系统(GPS)、甚长基线干涉(VLBI)和精密水准等。尤其InSAR在地球动力学方面的研究最令人瞩目。 二维相位解缠是InSAR 数据处理流程中重要步骤之一,也是主要误差来源,无论是获取数字高程模型还是获取地表形变信息,其精确程度都高度依赖于有效的相位解缠。因此,本人在课程期间对相位解缠的相关文献进行了阅读。 二、InSAR基本原理 用两副雷达天线代替两个光源 S,2S,对地面发射相干信号, 1
将得到类似的条纹图。因为雷达信号与光线本质上都是电磁波,所以只要保证雷达天线载具运行轨道的稳定,那么两个信号到达地面上某一点处的路程差是确定的,只与该点在地面上的位置有关。在 InSAR 干涉测量中有两种模式,一种是在载具(卫星或飞机)上搭载一具天线,而载具两次通过不同轨道航线飞经目标地域上空,此种称之为单天线双航过模式;另一种在载具上搭载两副天线,只飞经目标地域上空一次,此种方式称之为双天线单航过模式。不论是哪种方式都可以用图 来模拟并作出几何解释。 在测量中两副天线或两次航过接收的数据可以各获得对地面同一区域的两幅包含幅值与相位信息的二维复数据图像,分别以1S ,2S 表示为 2 22224||exp()||exp()j r S S S π?λ== () 其中1||S 和2||S 表示幅值信息,1?和2?表示相位信息。将两幅图像 作共轭乘,可得 *12121212124()||||exp()||||exp( )j r r S S S S S S π??λ-?=?-=? () 124()j r r πλ-为两幅图像中相对应的像点的相位差,由路程差决定的,由余弦定理有 2222112cos()r r B Br αβ=+++ () 可得 222 211 arccos()2r r B Br βα--=- () 根据式()的结论,两路雷达波路程差与相位差成正比
天线相位中心
天线的相位中心 天线的相位中心概念:天线所辐射出的电磁波在离开天线一定的距离后,其等相位面会近似为一个球面,该球面的球心即为该天线的等效相位中心。 一、天线等效相位中心的坐标的推导: 1、利用远场格林函数公式,可以得到磁矢势的表达为 (1) 2、对方程(1)在整个求解空间进行积分,可以得到远场电场的表达式为 E(r)=(2) 方程(2)中的表示辐射源的坐标,即确定的坐标可得等效相位中心点坐标。 3、如果方程(2)中和电场相关量都是已知的,我们就可以分别确定的分 量。 对于电场远场的相位,可以表示为: 在直角坐标系下,矢量可以表示为: 4、在x-z平面,电场远场的相位可以表示为 (3) 5、对方程(3)的左右两边同乘以,再对在0到的范围内进行积分,由于 三角函数的正交性,消去了和相关的分量,得到表达式 (4) 6、波数,其中是自由空间的光速,f是天线的工作频率,我们可以 得到的表达式为 (5) 我们只需要将暗室测试所得到的电场相位,代入方程(4),就可以确定出的z方向分量,即相位中心的坐标。 7、和确定的方法类似,我们可以分别得出的和分量的表达式,也即确 定了天线等效相位中心点的坐标。最终的相位中心表达式如下所示
坐标取值范围截面表达式 二、天线等效相位中心的程序实现 上面的分析中,我们已经得到了等效相位中心的x,y,z坐标公式,只需要将微波暗室得到的远场相位数据在相应的面上导出,代入软件中计算即可得出相位中心坐标结果。该软件采用MATLAB语言编写,可在安装了MATLAB 的MCRinstaller工具环境下运行。以下是使用新益技术SY24系统测量天线辐射数据,采用该软件计算中心频率为940MHz的一款dipole天线相位中心结果如下图所示: 图一软件及多频段相位数据 图二软件自动输出的txt文本结果
相位差的计算
12.1.3光程与光程差的计算 在分析和讨论光的干涉过程时,必须考虑光在不同介质中传播的问题,例如光穿过透镜时的情况。由于光在不同介质中的波速和波 长不相同,光干涉的情况比前面在机械波中的讨论要复杂一些。 一、光程和光程差 先分析光的波长在介质中变化的情况。介质的折射率定义为真空光速与介质中光速的比,故有 其中λ表示光在真空中的波长,表示介质中的波长。由于,所以即光在介质中的波长比真空中的波长要短一些。 下面分析一束光在介质中传播时光振动的相位差。设有一束光在空间传播,沿光线设立x轴,A和B为x轴上两点,光在A B之间的路程(波程)为x,即B点比A点距离波源要远x这么一段长度,见下图(a)。若A B之间是真空或空气,则A B之间光振动的时间差,即B点的光振动比A点在时间上要落后;A B之间光振动的相位差,即B点比A点在相位上要落后,其中λ为光在真空中的波长。若A B之间是折射率为n的介质,见下图(b),则A B之间光振动的时间差,相位差
,其中为介质中的波长,可见相位差不仅和波程x相关,还与折射率有关。若A B之间有几种不同的介质,其长度分别为、、…折射率分别为、、…,见下图(c),则 A B之间的时间差为,相位差为,其中λ为真空中的波长。 光程的概念 定义A B之间的光程为 求和沿光线(光路)进行,则A B之间光振动的时间差可简洁表示为 相位差为 在形式上又回到了“真空”情况。光程显然和波程不同,光程含有波程和折射率两个因数,除非在光路上全是真空或空气,光程大于波程。
在物理意义上,光程的概念有等价折算的含义。例如,有3/4毫米长折射率为4/3的一层水膜,有2/3毫米折射率为3/2的一块玻璃片,这两个物体在很多方面性质都不同,如力学性质、热学性质、电学性质等等。但它们的光程相同(1毫米),这意味着光通过它们时所需要的时间,以及由此产生的相位差相同,都相当于1毫米的真空。在引起光振动的时间差和相位差方面,它们完全等价,或者通俗地说,是不可分辨的。 下面考虑两束相干光在干涉点的相位差。设有两束相干光,来自于同一个光源,在干涉点p相遇。它们从光源到干涉点的光程分别为和,于是它们在p点引起的两个光振动的相位分别比光源落后和,故它们之间的相位差为 。 定义两束相干光在干涉点p的光程差 则该点光振动的相位差 在上面的定义中,光程和是从两束相干光共同的光源开始计算的(两个子光波列被分开的地方开始计算)。显然,如果不从光源而是从两个同相点算起,其结果仍然正确。 二、薄透镜的等光程性
实验六 相位干涉仪测向技术
学 院 通信工程学院 专 业 信息对抗技术 指导教师 沈雷老师/孙闽红老师 学生姓名 邓斌 学 号 11073115 实验日期 2014.05. 实验六 相位干涉仪测向技术 一、实验目的 无线电测向和定位就是确定通信辐射源的来波方向和位置。对通信信号的测向和定位是通信侦察对抗领域的一个重要且相对独立的技术领域。干涉仪测向又称为相位法测向。本实验主要目的为通过实验,了解并掌握通信测向中相位法测向的基本原理和方法。 二、实验原理 1、相位干涉仪测向原理 图 1 以单基线干涉仪测向为例,其电波到达相邻天线阵元形成的波程差如上图所示。图中测向天线阵由两个阵元组成,假设辐射源与阵元相距很远,所以可认为辐射源发射到阵元1和2的信号平行。假设阵元1和阵元2之间的间距为d ,来波方向与阵列法线方向的夹角为θ。测向的实质是测量夹角θ。 阵元1和阵元2接收到的信号传播存在波程差,因而也存在相位差。设阵元1接收信号为 20()()cos(2)r t s t E f t π== 则阵元2的接收信号为 102sin ()()cos(2)d r t s t E f t πθ τπλ =-=- 其中0/c f λ=为信号波长。 从上可以看出,信号传播距离差为θsin ?=?d l ,则相位差为:
λθπ?/sin 2??=?d 实际中d 、λ均已知,所以只要得到阵元1和2接收信号的相位差,便可以求出θ。需要注意的是,为了避免相位模糊问题,常需要满足条件π?
基于自适应稀疏表示的压缩感知及相位恢复算法研究
基于自适应稀疏表示的压缩感知及相位恢复算法研究 高效地获取、处理及传输信息对于科技进步至关重要。作为信息的载体,图像在传统采集过程中通常需要以高采样频率采样才能够被完美重建。然而,较多的测量数据既增加了采样端的复杂性,又给数据的传输、处理与存储增加了压力。如何利用少量测量数据重建高质量图像是一大挑战。 为解决该问题,本文利用自适应稀疏表示技术研究从信息缺失严重的测量数据中重建高质量图像的算法,重点研究有效的压缩感知核磁共振成像(Compressed Sensing Magnetic Resonance Imaging,CSMRI)与相位恢复(Phase Retrieval,PR)算法。具体研究内容及创新性成果如下:首先,为解决现有CSMRI 算法在低采样率下重建质量低的问题,提出基于一阶逼近字典学习的CSMRI算法及融合局部稀疏性、即插即用先验的CSMRI算法。字典学习方法在图像重建中至关重要,本文对传统字典学习代价函数中的字典与系数的乘积项进行一阶逼近提出了能够有效捕获图像信息的一阶逼近字典学习方法。此外,利用该方法提出了有效的CSMRI算法。 根据图像与其去噪结果应尽可能接近的原理,构建了即插即用正则化模型。将该模型引入到基于一阶逼近字典学习的CSMRI中以利用多种先验知识进行图像重建,实验验证了算法的有效性。其次,为解决低过采样率下现有PR算法重建质量低的问题,提出了基于紧标架、自适应正交字典的PR算法。传统相位恢复的测量数据包含关于待重建图像较少的结构信息,为保证重建高质量图像需利用额外的先验信息进行重建。 为此,提出利用图像在TIHP(Translation Invariant Haar Pyramid)紧标架下的稀疏性进行相位恢复的算法。由于紧标架的非自适应性,上述算法在更低的过采样率下重建质量不高。为解决该问题,提出利用自适应字典进行相位恢复的算法。该算法将字典限制为正交结构以降低算法计算复杂度,通过傅里叶模值联合优化字典与图像,实验验证了算法的有效性。 再次,提出迁移正交稀疏变换学习算法,并利用该方法进行相位恢复。由于相位恢复的初始估计图像通常为随机的,初始迭代的估计图像包含大量噪声,将该估计图像的图像块作为训练样本不利于字典学习。为解决该问题,构造了稀疏变换正则项以衡量待学习稀疏变换与已知稀疏变换的相似性。提出迁移正交稀疏变
相位差检测
课程设计报告 课程电子测量与虚拟仪器课程设计 题目相位差检测电路 系别物理与电子工程学院 年级2008 专业电子科学与技术班级 2 学号 学生姓名 指导教师职称讲师 设计时间2011-3-28~2011-4-1
第一章绪论 (2) 1.1 相位差检测电路的介绍 (2) 1.2 相位差测量的简单介绍 (2) 第二章相位差检测电路 (3) 2.1 移相电路的设计 (3) 2.2 利用MULTISIM设计检测移相电路 (5) 2.2.1 仿真电路虚拟仪器参数调整 (6) 2.2.2移相电路的仿真与分析 (7) 2.3将相位差信号转换成直流电压信号检测 (9) 2.3.1将相位差信号转换成直流电压信号检测的原理 (9) 2.3.2 电路图及具体原理分析 (9) 2.3.3 仿真过程 (10) 2.3.4 系统测量的误差分析 (12) 主要参考文献 (13) 附录 (13)
第一章绪论 1.1 相位差检测电路的介绍 设计一个相位差检测电路,该电路可测试一个经过移相电路的信号(正弦波)移相后与原信号间存在的相位差,可由测试电路检测并显示。要求:设计移相电路;设计检测电路,可以使用MCU或者Labview;使用模拟式检测方法,将相位差信号转换成直流电压或者直流电流信号进行检测;要求分析系统最后的精度。 在此次的电子测量与虚拟仪器课程设计中,我们设计的相位差检测电路主要有两个模块,由这两个模块来实现对相位差的检测并用相应的器件来实现。第一个模块为移相电路,移相电路主要由两个放大器组成。一个放大器可以实现对输入信号进行0~900的移相,那么两个放大器可以实现对输入信号进行0~1800的移相。移相电路的结构比较简单,只要对放大器相应知识进行了解便能很快的设计出移相电路。在移相电路中还应用到了变位器和电容。通过调节变位器可以逐步实现每个度数的相位差;电容的作用则是实现对输入信号的滤波和使放大器工作在稳定的区域。第二个模块则是实现相位差的显示。此部分的模块主要由二极管、异或门以及放大器组成。二极管的作用是使信号工作在正负管压降之间,使电路快速的运行和工作。异或门有三个,异或门的作用主要是实现将信号与基准信号进行比较,将相位差转换成电压差的方法,然后通过电压表将电压显示,最后将电压放大一百倍即使所求的相位差。 1.2 相位差测量的简单介绍 振幅、频率和相位是描述正弦交流电的三个“要素”。以电压为例,其函数关系为 u=U m sin(ωt+φ0) 式中:U m 为电压的振幅;ω为角频率;φ0为初相位。 设φ=ωt+φ0,称为瞬时相位,它随时间改变,φ0是t=0时刻的瞬时相位值。两个角频率为ω1,ω2的正弦电压分别为
一种 InSAR 干涉相位图的自适应滤波算法
收稿日期:2010?06?12 基金项目:国家自然科学基金资助项目(60802074,41001282);教育部新世纪优秀人才支持计划资助项目;中央高校基本科研业务费专项 资金资助项目(JY10000902011) 作者简介:郭 交(1984-),男,西安电子科技大学博士研究生,E?mail:jiao.g@https://www.360docs.net/doc/ff7868910.html,.doi押10.3969/j.issn.1001?2400.2011.04.014 一种InSAR 干涉相位图的自适应滤波算法 郭 交,李真芳,刘艳阳,保 铮 (西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071) 摘要:提出了一种自适应的InSAR 干涉相位图滤波方法.干涉相位滤波算法的关键是独立同分布滤波 样本的选取,该方法以相位变化最小为准则,根据区域增长策略,在当前滤波像素的邻域空间内自适应 地选择滤波窗口,再在此窗口内进行复数平均得到滤波后的干涉相位值.以相位变化最小为准则进行滤 波样本的选取,使其满足独立同分布的条件,从而提高干涉相位滤波的性能.仿真数据和实测数据的处 理结果表明,该算法具有较好的滤波性能,能够充分保持干涉相位图像细节,并有效地去除噪声. 关键词:干涉合成孔径雷达;干涉相位图;相位滤波;自适应区域增长 中图分类号:TN957 文献标识码:A 文章编号:1001?2400(2011)04?0077?05 New adaptive noise suppressing method for interferometric phase images GUO Jiao熏LI Zhenfang熏LIU Yanyang熏BAO Zheng 穴National Key Lab.of Radar Signal Processing熏Xidian Univ.熏Xi’an 710071熏China雪 Abstract押 This paper proposes a new adaptive noise suppressing method for interferometric phase images.The key point of noise filtering for interferometric phase images is the selection of the independent and identically distributed 穴i.i.d.雪samples.The proposed method determines filtering samples with the criterion of the minimum phase differences according to the region?growing strategy熏and then computes the filtered phase in the complex domain.Due to the minimum phase difference熏the proposed method selects the filtering samples that obey the i.i.d.assumption more accurately熏thus improving the filtering performance.Finally熏experiments carried out on simulated and real data confirm that the proposed method possesses a better filtering performance and has the ability to suppres the noise effectively while maintaining the interferogram details adequately. Key Words押 synthetic aperture radar interferometry 穴InSAR雪鸦interferogram鸦phase filtering鸦adaptive region growing 干涉合成孔径雷达(InSAR)是获取地面数字高程图(DEM)的重要遥感技术.它通过对同一地区获得的两幅相干SAR 复图像进行干涉处理,得到观测区域的三维地形图[1].干涉相位图滤波是InSAR 数据处理中的关键步骤之一,相位滤波性能直接影响后续的二维相位展开处理,最终影响DEM 的高程精度[2].因此,研究稳健的相位图滤波算法具有重要的应用价值. 干涉相位图的滤波算法总是假定滤波窗口内的样本点满足独立同分布的假设,这样得到的均值滤波结果在统计意义上才等于滤波相位的均值[3?4].然而,在InSAR 数据的实际处理中,由于受地形起伏的影响和滤波样本的限制(最优的滤波结果应该是集合平均,而不是通常处理中所采用的空间平均),位于滤波窗口内的数据样本不可能严格满足独立同分布,尤其在地形变化剧烈的地区,这必然会导致滤波结果偏离理想真值. 最原始的圆周均值滤波方法根据经验值选取固定的滤波窗口(例如形状为规则正方形,大小为7×7),2011年8月第38卷 第4期 西安电子科技大学学报(自然科学版)JOURNAL OF XIDIAN UNIVERSITY Aug.2011Vol.38 No.4
相位干涉仪测向
相位干涉仪测向 07083115 07083119 一、 题目要求 使用Simulink 模拟构建一个相位测向系统, 构造两个有时延的到来信号,对其进行捕获,分别在时域和频域上对接收的信号进行方向估计,并评估侧向效果。 二、 实验方案及公式推导 A. 公式推导 图 1 信号为0()cos(2)s t E f t π=,则如图 1所示天线长为d,信号方向与参考方向夹角为θ 设2点的接收信号为20()()cos(2)r t s t E f t π== (1) 则1点的接收信号为102sin ()()cos(2) d r t s t E f t πθ τπλ =-=- (2) 其中0 c f λ= 为信号波长 ①时域测向 将12(),()r t r t 改写为复数形式得 022()j f t r t Ee π= (3) 21()j f t r t Ee π?-= (4) 其中2sin d πθ ?λ =- 对(3)式取共轭得, 0 2*2()j f t r t Ee π-= (5) (4)式与(5)式相乘得, *212()()j r t r t E e ?-= (6)
对(6)式求相角,乘以2d λ π-得, sin 2d ?λ θ π= (7) 取反正弦,乘以0 180 π ,求出 θ ②频域测向 将(3)、(4)作FFT 得, 20()()R w E f f δ=- (8) 10()()j R w E f f e ? δ-=- (9) 由公式 ()arctan () I Q R k R k θ= 求出 2121()()arctan arctan () () I I Q Q R k R k R k R k ?=- (10) 同① ,可求出 θ B.方案论述 一、伯努利二进制码流经BPSK 产生2()r t 二、产生12()()j r t r t e ?-= 三、①时域法:*12()()r t r t 取出? ②频域法:对12(),()r t r t 作FFT,求出相位差? 四、根据?的值对应求出θ 三、Simulink 框图说明及参数设计: 依据方案的设计,建立Simulink 仿真模型 A.框图模块说明 : 相乘器 相加器 二进制数据流 高斯白噪声信道
相干检测载波恢复算法的概述
相干检测载波恢复算法的概述 摘要:随着互联网流量的日益增长,部署更高数据速率和大容量的光传输系统已成为势在必行。然而,偏振模色散和信道内的非线性效应使信号质量明显变差,基于直接检测系统将不再满足高质量的接收性能要求。前瞻性的研究进展明确指出,与数字信号处理(DSP)技术的结合将使相干检测技术更加具有吸引力。在相干检测DSP算法中,载波恢复是必不可少的。对调相信号,载波与本振间的频率和相位偏移会使信号产生较大的相位失真,为了保证信息的可靠传输,对载波频率偏移和相位偏移估计方法的研究与改进具有重要意义。 关键词:偏振模色散;光传输;相干检测;DSP;载波恢复 1、前言 在当今的信息化、网络化时代,随着社会科技水平的进步和人们生活水平的提高,人们对通信业务的需求及通信质量的要求越来越高。第四代移动通信系统(4G)在全球范围内已经广泛应用,它是一种能够提供多种类型、高质量的多媒体业务,可以实现全球无缝隙覆盖,具有全球漫游能力,并且与固定网络相互兼容,用终端设备可以在任何时候、任何地点与任何人进行任何形式通信的移动通信系统。然而随着技术的不断发展和用户对新业务的需求的不断提升,更高速、更高质量和超大容量成为了通信领域发展所追求的主要目标。 目前,电信正以惊人的速度在发展,而光纤通信是电信中发展最快、最具有活力的部分之一。在当前的通信网络构架中,光通信系统,特别是光纤通信系统在容量、速率和传输距离方面表现出强大的优势,使其逐渐占据了通信舞台的主角地位。在20世纪80年代末期和90年代初期,相干系统曾经是重要的技术,但在20世纪90年代末期,由于光放大器的出现,对相干系统的研究出现了停滞。近年来,随着数字信号处理(Digital Signal Processing,DSP)技术的发展和低成本器件的出现,使得相干接收技术的研究又开始火热起来,这主要是因为相干系统可在高数据速率条件下降低对接收机的要求以及相干接收所具有的一些独特优势。在相干检测中对于瞬时相位信息的保留使得在电域中对色散进行自适应补偿成为可能。此外,相干系统的有利之处还在于,光域的所有信息都可以在电域获得,因此,可以避免使用辅助的光调制与干涉方法进行检测,而在直接检测系统中必须使用这种方法,于是光域的复杂度就被转移到了电域。正由于相干检测的各种优势,特别是具备补偿光传输中多种损伤的能力,相干光研究曾活跃于上世纪九十年代。然后,由于缺乏相应的高速数字信号处理芯片的支持,
相位恢复算法在量子关联衍射成像中的应用研究
第27卷 第11期 2007年11月 光 学 学 报 ACT A OPT ICA SINICA V ol.27,No.11N ov ember ,2007 文章编号:0253 2239(2007)11 2075 7 相位恢复算法在量子关联衍射成像中的应用研究 * 刘永峰 张明辉 沈 夏 魏 青 韩申生 (中国科学院上海光学精密机械研究所,上海201800) 摘要: 随着研究工作的逐步深入,目前已经利用经典热光源实现了关联衍射成像,使得该技术有望在X 射线以及中子衍射成像等方面得到广泛应用。在实验利用非相干光得到物体无透镜傅里叶变换频谱的基础上,采用误差消除与输入输出恢复算法,并结合过采样理论,实现了实验所用物体透射率函数的恢复。分别得到了纯振幅物体的振幅分布函数与纯相位物体的相位分布函数。此外,还讨论了实验所得傅里叶变换频谱的噪声等因素对图像恢复结果的影响。 关键词: 量子光学;量子信息;量子关联衍射成像;相位恢复中图分类号:O 431.2;O 436 文献标识码:A *国家自然科学基金(60477007)和上海光科技特别项目基金(034119815)资助课题。 作者简介:刘永峰(1980-),男,吉林人,硕士研究生,主要从事非局域量子关联成像方面的研究。E mail:yfliu349@sio https://www.360docs.net/doc/ff7868910.html, 导师简介:魏 青(1969-),男,陕西人,副研究员,主要从事生物光子学方面的研究。E mail:qing w @https://www.360docs.net/doc/ff7868910.html, 收稿日期:2007 03 09;收到修改稿日期:2007 05 17 Application of Phase Retrieval Algorithm to Quantum Corre lated Diffraction Imaging Liu Yo ngfeng Zhang Minghui Shen Xia Wei Qing Han Shensheng (Sha ngha i Instit ute of Opt ics a nd Fin e Mecha nics ,the Chinese Academy of Scien ces ,S han gha i 201800)Abstract: With our research going deeply,quantum correlated diffraction imaging can be accomplished by use of c lassical thermal source now,which indicates its wide application in X ray and neutron diffrac tion imaging.The object transmission functions are suc cessfully retrieved from the lensless Fourier transform frequency spectrums,which are obta ined in experiment using incoherent https://www.360docs.net/doc/ff7868910.html,ing the error reduction algorithm and the input output a lgorithm integrated with over sam pling theory,the amplitude distribution function of amplitude only object and the phase distribution function of pure phase object are retrieved successfully.The influence of the noise of Fourier transform frequency spectrum in the experiment on the retrieval result is a lso discussed. Key wo rds: quantum optic s;quantum information;qua ntum c orrelated diffraction imaging;phase retrieval 1 引 言 在某些情况下,相位信息与振幅信息同样重要。对于相位信息,在频率较低的波段可以直接探测得到,但是在光波段或者波长更短的波段,因为频率高达1014 H z 以上,目前探测器的响应速度无法实现直接探测,只能借助光场的干涉或衍射强度分布来间接地恢复光场的相位分布。近年来,在光场干涉与衍射研究领域,量子成像作为一个新的物理现象,引起了学者们的关注并开展了理论和实验方面的工作,起初主要是基于非经典纠缠光束开展相关研究 的[1~3]。随着研究的不断深入,科学家们又基于统计光学理论,提出并验证了利用经典热光场同样可以实现非局域关联成像[4~8] ,引导该方面研究走入一个新领域,也就是基于经典热光场的强度关联成像,使量子成像技术向实用化方向迈出重要一步 [9~13] 。目前实验上已经用非相干光源实现了物 体的无透镜傅里叶变换[14,15] ,得到的是光场的衍射强度信息,相位信息可以用相位恢复方法来间接得到,本文结合已有的相位恢复算法来研究量子关联衍射成像中的相位恢复问题。