数字控制器设计
课程论文
数字PID控制器设计
学生成绩:
学生学号:
学生姓名:
学生专业:
课程名称:数字控制技术
任课教师:
提交日期:2015 年 1 月7 日
数字PID 控制器设计
摘要
本文在完成计算机控制学习的基础上结合自动控制原理的学科知识,自拟题目,利用计算机控制系统的知识,借助MATLAB ,完成对自拟系统的分析和PID 控制器的设计,并将硬件电路画出。 关键词:计算机控制,PID 控制器,MATLAB 一﹑前言
设单位反馈系统的开环传递函数为)
130
)(15)(1()(0+++=
s
s s K
s G ,设
计数字PID 控制器,使系统的稳态误差不大于0.1,超调量不大于
20%,调节时间不大于0.5s 。并采用位置算法实现该PID 控制器。 二﹑设计原理
PID 控制是最早发展起来的经典控制策略,是用于过程控制最有效的策略之一。由于其原理简单.技术成熟,在实际应用中较易于整定,在工业控制中得到了广泛的应用。它最大的优点是不需了解被控对象精确的数学模型,其需在线根据系统误差段误差的变化率等简单参数,经过经验进行调节器参数在线整定,即可取得满意的结果。具有很大的适应性和灵话性。PID 控制中的积分作用可以减少稳态误差,但另一方面也容易导致积分饱和,使系统的超调量增大。微分作用可提高系统的响应速度,但其对高频干扰特别敏感,甚至会导致系统失稳。所以,正确计算PID 控制器的参数,有效合理地实现PID 控制器的设计,对于PID 控制器在过程控制中的广泛应用具有重要的理论和现实意义。
在典型PID 控制系统中.PID 控制器分别对误差信号E (t )进行比例、积分与微分运算.其结果的加权和集成系统的控制信号u(t),送给对象模型加以控制。
PID 控制器的数学描述为:01()()()()t
p D I
de t u t K e t e t dt T T dt ?
?
=+
+????
?(2.1)
其传递函数可表示为:()1
()(1)()p D I U s D s K T s E s T s =
=++
(2.2)
从根本上讲,设计PID 控制器也就是确定其比例系数Kp 、积分系数Ti 和微分系数Td 。,这三个系数取值的不同,决定了比例、积分和微分作用的强弱。控制系统的整定就是在控制系统的结构已经确定、控制仪表和控制对象等处在正常状态的情况下.适当选择控制器的参数使控制仪表的特性和控制对象的特性相配合.从而使控
制系统的运行达到最佳状态,取得最好的控制效果。
位置式PID 控制算法。由于计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量,需要进行离散化处理。现以一系列的采样时刻点kT 代表连续时间t ,以和式代替积分,以增量代替微分,则可以作近似变换;
图1
由于计算机控制是一种采样控制系统,它只能根据采样时刻的偏差值计算控制量。因此,(2.2)式中的积分和微分项不能直接使用,需要进行离散化处理。现令T 为采样周期,以一系列的采样时刻点kT 代表连续时间t ,以累加求和近似代替积分,以一阶后向差分近似代替微分,做如下的近似变换:
t=KT (2.3) ∑∑?===≈k
j k
j t
j e T jT e T t e 0
0)()()( (2.4)
T
k e k e T T k e kT e dt t de )
1()(])1[()()(--=--≈ (2.5) 其中,T 为采样周期,e(k)为系统第k 次采样时刻的偏差值,e(k-l)为系统第(k-l)次采样时刻的偏差值,k 为采样序号,k=0,1,2,…。 将上面的(2.4)式和(2.4)式代入(2.2)式,则可以得到离散的PID 表达式
)]}1()([)()({)(0
--+
+
=∑=k e k e T
T j e T T t e K k u D
k
j I
P (2.6) 如果采样周期了足够小,该算式可以很好的逼近模拟PID 算式,因而使被控过与连续控制过程十分接近。通常把(2.6)式称为PID 的位置式控制算法。若在(2.6)式中,令:
I
P I T T
K K =
(称为积分系数) ;T T K K D P D = (称为微分系数)
则
)]1()([)()()(0
--++=∑=k e t e K j e K t e K k u D k
j I P (2.7)
(2.7)式即为离散化的位置式PID 控制算法的编程表达式。可以看出,每次输出与过去的所有状态都有关,要想计算u(k),不仅涉及e(k)和e(k-l),且须将历次e(j)相加,计算复杂,浪费内存。下面,推导计算较为简单的递推算式。为此,对(2.7)式作如下的变动:
考虑到第(k-l)次采样时有
)]}2()1([)()1({)1(1
---+
+
-=-∑==k e k e T
T j e T T
k e K k u D
k j I
P (2.8) 使(2.7)式两边对应减去(2.8)式,得
)]}2()1(2)([)()1()({)1()(-+--++
--=--k e k e k e T
T
k e T T k e k e K k u k u D I P 整理后的
()(1){[()(1)]()[()2(1)(2)]}2(1)(1)()(1)(1)(2)D P I D
D D P P P I T T
u k u k K e k e k e k e k e k e k T T
T T T T u k K e k K e k K e k T T T T
=-+--++--+-=-++
+-+-+-)2()1()()1(210-+--+-=k e a k e a k e a k u (2.9)
其中,T
T
K a T T K a T T T T K a D P D P D I P =+=++
=210)21()1(,,,(2.9)式就是PID 位置式得递推形式。 如果令)1()()(--=?k u k u k u 则
)2()1()()(210-+--=?k e a k e a k e a k u (2.10) 式中的210a a a 、、同(2.10)式中的一样。
因为在计算机控制中0a 、1a 、2a 都可以事先求出,所以,实际控制时只须获得e(k)、e(k-l)、e(k-2)三个有限的偏差值就可以求出控制增量。由于其控制输出对应执行机构的位置的增量,故(2.10)式通常被称为PID 控制的增量式算式。 三﹑数字PID 参数整定
利用扩充临界比例度法选择数字PID 参数,扩充临界比例度法是
以模拟PID 调节器中使用的临界比例带法为基础的一种数字PID 参数的整定方法。其整定步骤如下:;
1.选择一个足够短的采样周期T 。通常选择采样周期为被控对象纯滞后时间的1/10。
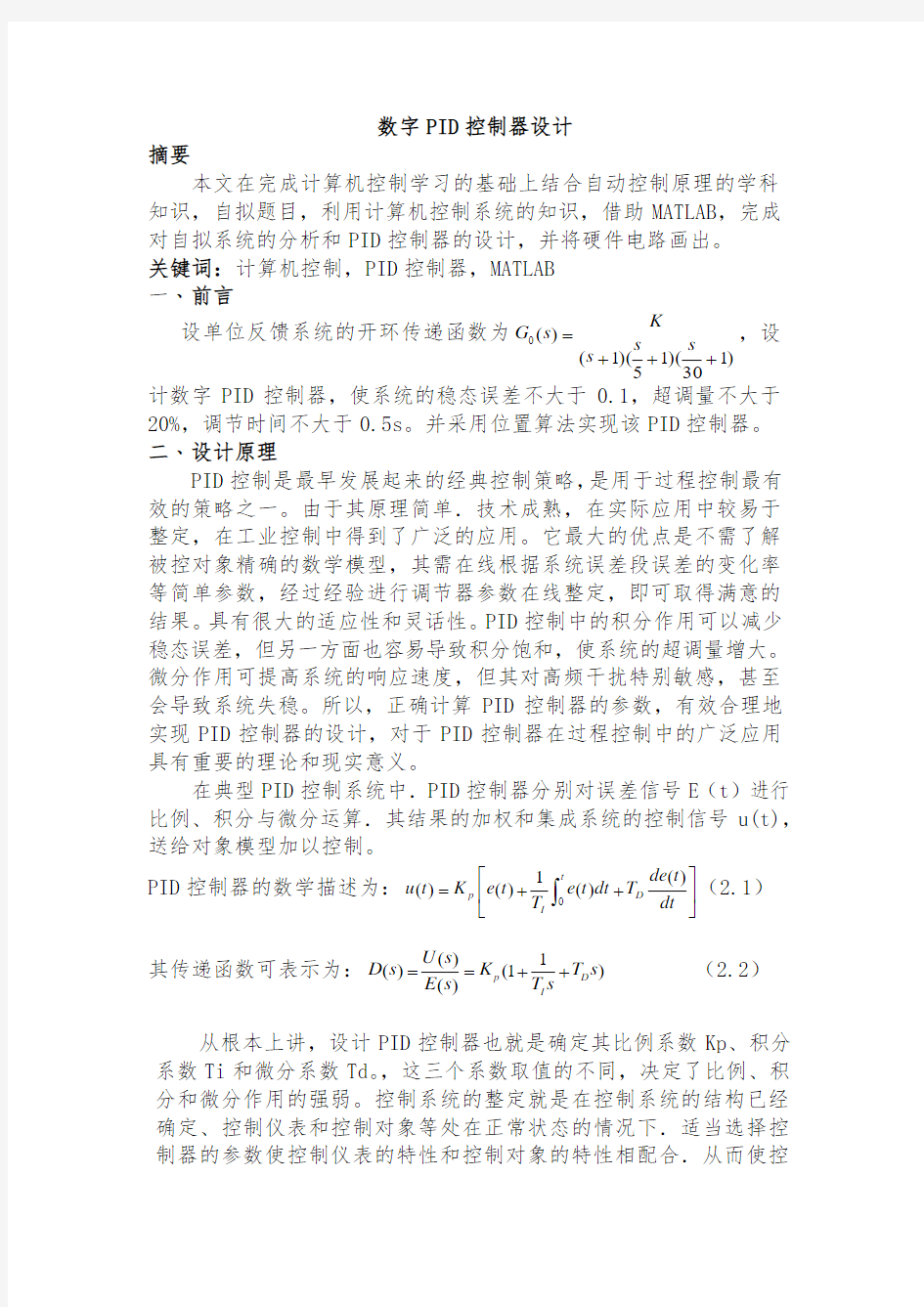
2.在纯比例的作用下,给定输入阶跃变化时,逐渐加大比例作用Kp(即减小比例带δ),直至系统出现等幅震荡,记录比例增益Kc,及振荡周期Tc 。Kc 成为临界振荡比例增益(对应的临界比例带δ),Tc 成为临界振荡周期。
在MATLAB 下输入如下程序:
sysc=tf([1],[1/150,36/150,185/150,1]); p=[20:1:45];
for i=1:length(p);
sysc0=feedback(p(i)*sysc,1); step(sysc0),hold on end;
axis([0,10,0,2.3]) 得到如下图所示图形:
012345678910
0.5
1
1.5
2
Step Response
Time (sec)
A m p l i t u d e
图2
调整程序参数p=[40:1:45]进一步精确得Kc 约为43.2,Tc 约为0.5,观察控制系统的响应特性。在MATLAB 下输入如下程序: sysc=tf([1],[1/150,36/150,185/150,1]); p=[40:1:45]; for i=1:length(p);
sysc0=feedback(p(i)*sysc,1); step(sysc0),hold on end;
axis([0,10,0,2.3]) 得到如下图所示图形:
图3
扩充临界比例度法选择数字PID 参数的计算公式如下表所示: 3.选择控制度。控制度的定义为数字调节器和模拟调节所对应的过度
012345678910
0.5
1
1.5
2
System: sysc0
Time (sec): 5.01Amplitude: 1.03
Step Response
Time (sec)
A m p l i t u d e
过程的误差平方积分之比,即控制度=202
D e dt
e dt
∞
∞?
?
式中,D e 为数字调节器
的控制误差;e 为模拟调节器的控制误差.当控制度为1.05时,数字调
节器鱼模拟调节器的控制效果相当;当控制度为2时,数字调节器比模拟调节器的控制效果差一倍;在此选控制度为1.05。
4.按选择的控制度指标及Tc,Kc 实验测得值,由查表选择相应的计算公式计算采样周期:T=0.007,Kp=27,Ti=0.245,Td=0.07;
P I i I
K T
K K T T ==
=0.77,d P D D K K T K T T ===270, Ki=0.23
图4 四﹑建立simulink 模型 1.采用后向差分离散化,可得:
11
1
1()
1()()
()
1p i d z s T
U z T z D z D s K K K E z z T
----=-===++-
= 在Matlab-simulink 中建立如下模型
Scope中得到阶跃响应曲线如下所示:
图5
由图可见超调量较大减小Kp的值,增大Kd用试凑法得到一组数据:T=0.014,Kp=15,Ki=0.23 ,Kd=250
2.采用后向差分离散化。Matlab-simulink中建立如下模型:
Scope中阶跃响应图形如下
图6
由上图可看出上组数据满足了任务要求:系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。
五MCS-51单片机实现控制器的设计
控制系统结构框图如下:
图7
1.器件选择
主控制器选用熟悉的AT89c51单片机。由于没有对精度的要求,选用常见的8位AD/DA芯片ADC0809和DAC0832。由于系统要求采样周期0.015ms,而上述AD、DA芯片转化时间很短(ADC0809约100us,DAC0832约1us),因此上述芯片满足要求。
2.电路设计
1、A/D芯片与单片机连接:单片机与AD、DA采用总线方式连接,锁
存器74LS373进行地址锁存。采用统一编址方式访问。地址线A0,A1,A2,A3分别于A,B,C,ALE连接,通过地址选择IN0口为输入。
2、DAC0832与单片机连接如下:电流输出,经双运放转化,输出为双极性。
系统总电路如下:
3.程序设计
程序采用汇编语言编写
主程序流程图、中断服务程序、PID算法流程图如下:
开始
↓
输入给定值r(k)
↓
初始化
↓
调用AD转换程序
测出输出值c(k)
↓
计算偏差
e(k)=r(k)-c(k)
↓
Up(k)=Kb*e(k)
Ui(k)=Ki[e(k)+Ui(k-
1)]
Ud(k)=Kd[e(k)-e(k-1
)]
↓
U(k)=Up(k)+Ui(k)+Ud(
k)
e(k)→e(k-1)
Ui(k)→Ui(k-1)
↓
调用DA转换程
序
输出控制量
u(k)
Y N
到达采样
周期?
程序设计如下:
R EQU 31H ;给定值(阶跃响应)
KP EQU 32H ;存放kp
KI EQU 33H ;存放256*ki
KD EQU 34H ;存放kd
E0 EQU 35H ;存放e(k)
E1 EQU 36H ;存放e(k-1)
UPL EQU 37H ;Up(k)的低8位
UPH EQU 38H ;Up(k)的高8位
UIL EQU 39H ;Ui(k-1)的低8位
UIH EQU 3AH ;Ui(k-1)的高8位
DAT EQU 3BH ;采样AD数据c(k)
UK EQU 3CH ;PID输出
ORG 0000H
AJMP MAIN
ORG 000BH
LJMP ITT0
ORG 0100H
MAIN: MOV SP,#60H
MOV R0,#31H
MOV R1,0CH CLR A
LOOP: MOV @R0,A ;31H~3CH清0
INC R0
DJNZ R1,LOOP
MOV R,#01H ;给定阶跃值1
MOV KP,#16 ;比例系数kp=16
MOV KI,#3AH ;积分系数256*ki=3AH
以整数输入
MOV KD,#250 ;微分系数kd=250
MOV TMOD,#01H ;设置定时器0方式1
工作(16位定时器)
MOV TL0,#0C9H ;定时14ms
MOV TH0,#4FH
SETB TR0
HERE: AJMP HERE
ITT0: MOV TL0,#0C9H ;重装初值
MOV TH0,#4FH
ACALL ADC ;调用AD转换程序
ACALL PID ;调用PID控制程序 ACALL DAC ;调用DA转换程序
RETI
ADC: MOV DPTR,#0F8H ;ADC0809模拟输入通道IN0的地址
MOVX @DPTR,A ;启动AD转换
ACALL DELAY ;软件延时1s,等待转换结束
MOVX A,@DPTR ;读取转换结果
MOV DAT,A ;转换结果保存,以便PID控制程序使用
DAC: MOV R0,#0F0H ;DAC0832地址F0H 送R0
MOV A, UK ;PID输出
MOVX @R0,A ;启动DA转换
RET
DELAY: PUSH PSW
PUSH ACC
SETB RS0 ;选第1组为当前工作寄存器区
CLR RS1
MOV R1,#05H
LOOP1: MOV R0,#64H
LOOP2: DJNZ R0,LOOP2 ;延时时间为(100*2+1+2)*5=1000us=1ms
DJNZ R1,LOOP1
POP PSW
RET
PID: MOV B,DAT
MOV A,R
CLR C
SUBB A,B ;求当次偏差e(k)=r-c(k)
MOV E0,A ;存e(k)
MOV B,KP
MUL AB ;求up(k)=kp*e(k)
MOV UPL,A ;保存up(k)的低8位 MOV UPH,B ;保存up(k)的高8位
MOV A,E0
MOV B,KI
MUL AB ;计算256ki*e(k)
MOV R1,B ;256ki*e(k)低8位丢掉,高8位->R1,为ki*e(k)
MOV R2,UIL ;ui(k-1)低8位->R2
MOV R3,UIH ;ui(k-1)高8位->R3
MOV A,R1 ;ki*e(k)->A
ADD A,R2 ;计算ui(k)低8位=ki*e(k)+ui(k-1)低8位
MOV R0,A ;暂存ui(k)低8位->R0 CLR A
ADDC A,R3 ;ui(k)高8位=ui(k-1)低8位+低位进位
MOV R1,A ;ui(k)高8位->R1
MOV UIL,R0 ;存ui(k)低8位
MOV UIH,R1 ;存ui(k)高8位
MOV A,E0 ;e(k)->A
MOV R0,E1 ;暂存e(k-1)->R0
MOV E1,A ;e(k)->e(k-1)为下次循环做准备
CLR C
SUBB A,R0 ;计算e(k)-e(k-1)
MOV B,KD
MUL AB ;计算ud(k)=kd*[e(k)-e(k-1)]
MOV R0,A ;暂存ud(k)低8位->R0 MOV R1,B ;暂存ud(k)高8位->R1
MOV A,R0
ADD A,UIL ;ui(k)低8位+ud(k)低8位->A
MOV R0,A ;暂存ui(k)低8位+ud(k)低8位->R0
MOV A,R1
ADDC A,UIH ;ui(k)高8位+ud(k)高8位+进位位->A
MOV R1,A ;暂存ui(k)高8位+ud(k)高8位->R0
MOV A,UPL
ADD A,R0 ;ui(k)低8位+ud(k)低8位+up(k)低8位->A
MOV R0,A ;暂存ui(k)低8位+ud(k)低8位+up(k)低8位->R0
MOV A,UPH
ADDC A,R1 ;ui(k)高8位+ud(k)高8位+up(k)高8位+进位位->A
MOV UK,A ;存ui(k)高8位+ud(k)高8位+up(k)高8位+进位位作为最后结果
RET
END
石油化工分散控制系统设计规范
《石油化工分散控制系统设计规范》SH/T3092-1999 发布者:shui5jjt | 来源:转载 | 时间:2010-04-06 UDC 中华少火民共和国行」k标准 SH/T 3092一1999 石油化工分散控制系统 设计规范 Code for the design of distributed control system fo rp et ro ch e mi ca l i n du stry 1999一09一22 发布2000一01一01 实施 国家石油和化学工业局发布 中华人民共和国行业标准 统 系 制 控范 散规 分计 工设 化 由 石 Code for the design of distributed control sys te m forp etrochemicali ndustry SH 3092一1999 主编单位:中国石化集团北京设计院 主编部门:中国石油化工集团公司 批准部门:国家石油和化学工业局 国家石油和化学工业局文件 国石化政发(1999)400号 关于批准《石油化工控制室和自动分析 器室设计规范》等7项石油化工
行业标准的通知 中国石油化工集团公司: 你公司报批的《石油化工控制室和自动分析器室设计规范》等7项石油化工行业标准草案,业经我 局批准,现予发布。标准名称、编号为: 强制性标准 1 S H 3006一1999 石油化工控制室和自动分析器室设计规范(代替S1I6-88) 2 SH 3 005- 1 999 石油化工自动化仪表选型设计规范(代替SHJ5- 8 8) 3 SH 3 022一1999 石油化工设备和管道涂料防腐蚀技术规范(代替SH22一90) 4 S H 3524一1999 石油化工钢制塔、容器现场组焊施工工艺标准(代替SH3524- 9 2) 5 SH 3 048一1999 石油化工钢制设备抗震设计规范(代替SH3048一93) 推荐性标准 1 SH/T 3092一1999 石油化工分散控制系统设计规范 2 SH/T 30% 一1999 加工高硫原油重点装置主要设备设计选材导则 以上标准自2000年1月1日起实施。 国家石油和化学工业局 一九九九年九月二十二日 SH/T 3092一1999 前言 本规范是根据中石化(1995)建标字269号文的通知由我院主编。 本规范共分9章和1个附录。主要内容包括:分散型控制系统工程各设计阶段的设计范围,系统技 术规格要求,硬件、软件的配置,应用软件组态及有关安装设计等技术规定。 在编制过程中,进行了比较广泛的调查研究,总结了近几年来石油化工厂的设计经验,吸收了国外 标准的有关内容,征求了有关设计、施工、生产等方面的意见,对其中主要问题进行了多次讨论,最后经 审查定稿。 本规范在实施过程中,如发现需要修改补充之处,请将意见和有关资料提交我院,以便今后修订时 参考。 我院的地址:北京西城区安德路甲67号 邮政编码:100011
基于FPGA的直接数字频率合成器设计
1 JANGSU UNIVERSITY OF TECHNOLOGY FPGA技术实验报告基于FPGA的直接数字频率合成器设计 学院:电气信息工程学院 专业:电子信息工程 班级: 姓名: 学号: 指导教师:戴霞娟、陈海忠 时间: 2015.9.24
1 目录 绪论.......................................................................................... 错误!未定义书签。 一、背景与意义 (2) 二、设计要求与整体设计 (2) 2.1 设计要求 (2) 2.2 数字信号发生器的系统组成 (3) 2.3 DDS技术 (3) 三、硬件电路设计及原理分析 (4) 3.1 硬件电路设计图 (4) 3.2 设计原理 (5) 四、程序模块设计、仿真结果及分析 (5) 4.1顶层模块设计 (6) 4.2分频模块设计 (6) 4.3时钟模块设计 (11) 4.4数据选择模块设计 (12) 4.5正弦波产生模块设计........................................................ 错误!未定义书签。 4.6三角波产生模块设计 (15) 4.7方波产生模块设计............................................................ 错误!未定义书签。 4.8锯齿波模块设计 (18) 五、软硬件调试 (21) 5.1正弦波 (22) 5.2锯齿波 (22) 5.3方波 (23) 5.4三角 (23) 六、调试结果说明及故障分析 (24) 七、心得体会 (24) 八、参考文献 (25) 九、附录 (25)
可编程控制器课程设计目的与要求
《可编程控制器》课程设计目的与要求 一、设计目的 可编程序控制器简称PLC,是近年来发展极为迅速、应用面极广的工业控制装置,它已成功地应用于工业中几乎所有领域,能完成从重复开关控制单一机器到复杂的制造加工控制的许多控制任务。《可编程控制器》是一门实用技术课程,既有一定的理论知识,又有实际技能训练,为此,在教学中安排一周的课程设计,其目的是: 1.综合运用PLC及相关课程的理论知识和实际应用知识,进行PLC控制程序设计,从而使这些知识得到进一步的巩固,加深和发展。 2.熟悉和掌握PLC控制系统的设计方法,PLC的选型和程序设计。 3.通过课程设计,熟悉设计资料,掌握编程技术,提高编程技巧,从而可以提高PLC 技术综合应用设计能力,培养独立分析问题和解决问题的能力,为今后毕业设计及实践打下必要的基础。 二、设计步骤和内容 1.总体方案的确定 根据控制要求,确定总体方案。 2.正确选用电气控制元件和PLC 根据选用的输入输出设备的数目和电气特性,选择合适的PLC,要求进行电气元件的选用说明。 3.分配I/O点,画出I/O连线图 根据选用的输入输出设备,确定I/O端口。依据输入输出设备和PLC的I/O端口分配关系,画出I/O连线图。 4.程序设计说明及过程分析 要求绘制控制系统流程图,详细进行程序设计过程的分析说明,设计简单、可靠的控制程序。 5.对系统工作原理进行分析,最后审查控制实现的可靠性 检查系统功能,完善控制程序。 6.在实验台上进行程序调试,直至满足控制要求; 根据系统工作实际工作情况,在实验台上用开关量信号和输出指示灯模拟系统工作实际,逐一置位输入信号,观察程序内部元件运行情况和指示灯输出情况与设计要求是否一致,排查程序和硬件接线错误直至满足控制要求。
直接数字频率合成器DDS研究设计毕业论文
直接数字频率合成器DDS研究设计毕业论文 目录 1. 引言 (1) 1.1 频率合成器的研究背景 (1) 1.2频率合成器的研究现状 (1) 2. 频率合成技术 (3) 2.1频率合成技术概述 (3) 2.2频率合成器的主要指标 (3) 2.3频率合成的基本方法 (5) 2.4 频率合成器的长期频率稳定度和相位噪声 (5) 2.4.1长期频率稳定度 (5) 2.4.2 相位噪声 (6) 2.4.3噪声来源 (7) 3. 直接频率合成(DS)技术 (8) 3.1 直接频率合成器的基本原理和组成 (8) 3.2直接频率合成器的几个主要组成电路 (9) 3.2.1混频器 (9) 3.2.2倍频器 (11) 3.2.3分频器 (12) 3.2.5石英晶体振荡器 (14) 4. 直接数字频率合成(DDS)技术 (17) 4.1 直接数字频率合成的组成及其特点 (17) 4.2 直接数字频率合成的基本原理 (19) 4.3 直接数字频率合成的相位噪声和杂散 (20) 4.3.1 直接数字频率合成的相位噪声 (20) 4.3.2 直接数字频率合成的杂散分析 (21) 4.3.3 降低杂散电平的方法 (21) 4.4 集成直接数字频率合成器的芯片介绍 (23) 5. 直接数字频率合成器的设计 (26) 5.1 DDS芯片在跳频系统中应用的总体框图 (26)
5.2 控制模块 (26) 5.2.1 AT89C51引脚说明 (26) 5.2.2 单片机外围电路设计 (28) 5.3 频率合成模块 (29) 5.3.1 AD9852的引脚说明 (29) 5.4电平转换模块 (32) 5.5低通滤波模块 (33) 5.6 放大电路 (35) 结束语 (36) 致谢 (37) 参考文献 (38)
出入口控制系统工程设计规范
中华人民共和国国家标准 出入口控制系统工程设计规范 Code of design for access control systems engineering GB50396-2007 主编部门:中华人民共和国公安部 批准部门:中华人民共和国建设部 施行日期:2 0 0 7年8月1日 中华人民共和国建设部公告第588号 建设部关于发布国家标准 《出人口控制系统工程设计规范》的公告 现批准《出人口控制系统工程设计规范》为国家标准,编号为GB 50396-2007,自2007年8月1 日起实施。其中,第3.0.3、5.1.7(3)、6.0.2(2)、7.0.4、9.0.1(2)条(款)为强制性条文,必须严格执行。 本规范由建设部标准定额研究所组织中国计划出版社出版发行。 中华人民共和国建设部 二o o七年三月二十一日 前言 根据建设部建标E200i]87号文件《关于印发“二000至二00一年度工程建设国家标准制订、修订计划”的通知》的要求,本规范编制组在认真总结我国出入口控制系统工程建设实践经验的基础上,参考国内外相关行业的工程技术标准,广泛征求国内相关技术专家和管理机构的意见,制定了本规范。 本规范是《安全防范工程技术规范}GB 50348的配套标准,是安全防范系统工程建设的基础性标准之一,是保证安全防范工程建设质量、保护公民人身安全和国家、集体、个人财产安全的重要技术保障。 本规范共10章,主要内容包括:总则,术语,基本规定,系统构成,系统功能、性能设计,设备选型与设置,传输方式、线缆选型与布线,供电、防雷与接地,系统安全性、可靠性、电磁兼容性、环境适应性,监控中心。 本规范中黑体字标志的条文为强制性条文,必须严格执行,本规范由建设部负责管理和对强制性条文的解释,由公安部负责日常管理。本规范由全国安全防范报警系统标准化技术委员会(SAC/TC 100)负责具体技术内容的解释工作。在应用过程中如有需要修改和补充之处,请将意见和有关资料寄送全国安全防范报警系统标准化技术委员会秘书处(北京市海淀区首都体育馆南路一号,邮政编码:100044,电话:010-********,传真010-********,E-mail:tcl00sjl@https://www.360docs.net/doc/3c7572969.html,)以供修订时参考。 本规范主编单位、参编单位和主要起草人员: 主编单位:全国安全防范报警系统标准化技术委员会 参编单位:北京艾克塞斯科技发展有限责任公司 北京天龙控制系统公司 主要起草人:朱峰刘希清施巨岭何培重 目次 1总则 (1) 2术语 (2) 3基本规定 (6) 4系统构成 (8) 5系统功能、性能设计………………………………………(I 3) 5.1一般规定………………………………………………(1 3) 5.2各部分功能、性能设计……………………………………(1 5) 6设备选型与设置…………………………………………(1 7)
数字PID控制器设计
数字PID控制器设计 实验报告 学院电子信息学院 专业电气工程及其自动化学号 姓名 指导教师杨奕飞
数字PID控制器设计报告 一.设计目的 采用增量算法实现该PID控制器。 二.设计要求 掌握PID设计方法及MATLAB设计仿真。 三.设计任务 设单位反馈系统的开环传递函数为: 设计数字PID控制器,使系统的稳态误差不大于,超调量不大于20%,调节时间不大于。采用增量算法实现该PID控制器。 四.设计原理 数字PID原理结构图 PID控制器的数学描述为:
式中,Kp为比例系数;T1为积分时间常数;T D为微分时间常数。 设u(k)为第K次采样时刻控制器的输出值,可得离散的PID表达式为:? 使用模拟控制器离散化的方法,将理想模拟PID控制器D(s)转化为响应的理想数字PID控制器D(z).采用后向差分法,得到数字控制器的脉冲传递函数。
2.增量式PID控制算法 u(k)=u(k-1)+Δu(k) 增量式PID控制系统框图 五.Matlab仿真选择数字PID参数 利用扩充临界比例带法选择数字PID参数,扩充临界比例带法是以模拟PID调节器中使用的临界比例带法为基础的一种数字PID参数
的整定方法。其整定步骤如下 1)选择合适的采样周期T:,因为Tmin<1/10 T,选择采样周期为; 2)在纯比例的作用下,给定输入阶跃变化时,逐渐加大比例作用 Kp(即减小比例带δ),直至系统出现等幅震荡,记录比例增益 Kr,及振荡周期Tr 。Kr成为临界振荡比例增益(对应的临界比 例带δ),Tr成为临界振荡周期。 在Matlab中输入如下程序? G=tf(1,[1/150,36/150,185/150,1]); p=[35:2:45]; for i=1:length(p) Gc=feedback(p(i)*G,1); step(Gc),hold on end; axis([0,3,0,]) 得到如下所示图形: 改变其中的参数P=[35:2:45]为p=[40:1:45]得到下图曲线,得Kr约为43,Tr
外文翻译---关于直接数字频率合成器
All About Direct Digital Synthesis What is Direct Digital Synthesis? Direct digital synthesis (DDS) is a method of producing an analog waveform —usually a sine wave —by generating a time-varying signal in digital form and then performing a digital-to-analog conversion. Because operations within a DDS device are primarily digital, it can offer fast switching between output frequencies, fine frequency resolution, and operation over a broad spectrum of frequencies. With advances in design and process technology, today’s DDS devices are very compact and draw little power. Why would one use a direct digital synthesizer (DDS)? Aren’t there other methods for easily generating frequencies? The ability to accurately produce and control waveforms of various frequencies and profiles has become a key requirement common to a number of industries. Whether providing agile sources of low-phase-noise variable-frequencies with good spurious performance for communications, or simply generating a frequency stimulus in industrial or biomedical test equipment applications, convenience, compactness, and low cost are important design considerations. Many possibilities for frequency generation are open to a designer, ranging from phase-locked-loop (PLL)-based techniques for very high-frequency synthesis, to dynamic programming of digital-to-analog converter (DAC) outputs to generate arbitrary waveforms at lower frequencies. But the DDS technique is rapidly gaining acceptance for solving frequency- (or waveform) generation requirements in both communications and industrial applications because single-chip IC devices can generate programmable analog output waveforms simply and with high resolution and accuracy. Furthermore, the continual improvements in both process technolog y and design have resulted in cost and power consumption levels that were previously unthinkably low. For example, the AD9833, a DDS-based programmable waveform generator (Figure 1), operating Figure 1. The AD9833-a one-chip waveform generator.
DB11T 722-2010 节水灌溉工程自动控制系统设计规范
ICS 65.060.35 B01 备案号:28407-2010 DB11 北京市地方标准 DB11/T 722—2010 节水灌溉工程自动控制系统设计规范 Design specification of automatic control system for water saving irrigation 2010-06-28发布2010-10- 01实施
目次 前言................................................................................. II 1 范围 (1) 2 规范性引用文件 (1) 3 术语和定义 (1) 4 总体要求 (1) 5 自动控制系统 (2) 6 辅助设计 (3) 7 设计文件组成 (4) 参考文献 (5)
前言 为规范节水灌溉工程自动控制系统的设计,明确节水灌溉工程自动控制系统应达到的功能要求和技术指标,制定本标准。 本标准按照GB/T 1.1-2009给出的规则起草。 本标准由北京市水务局提出并归口。 本标准由北京市水务局负责组织实施。 本标准负责起草单位:北京市水利水电技术中心 本标准参加起草单位:扬州大学,中国水利水电科学研究院 本标准主要起草人:何浩,李彬,李春喜,胡孟,胡明罡,金兆森,孙青松,窦以松,张晓辉,郭强,田金霞,单军,李黔湘,毛德发,税蓬勃,裴永刚,潘琼芝,贺启有,王红雷 II
DB11/T 722—2010 节水灌溉工程自动控制系统设计规范 1 范围 本标准规定了节水灌溉工程自动控制系统的总体要求、软硬件设计、辅助设计以及设计文件组成等。 本标准适用于设施农业等节水灌溉工程自动控制系统的设计。 2 规范性引用文件 下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本文件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。 GB/T 2900.56 电工术语自动控制 GB/T 17212 工业过程测量和控制术语和定义 GB 50057 建筑物防雷设计规范 DB11/T 341 村镇供水工程自动控制系统设计规范 DB11/T 557 设施农业节水灌溉工程技术规程 3 术语和定义 GB/T 2900.56、GB/T 17212、GB 50057、DB11/T 341及DB11/T 557界定术语和定义适用于本文件。 4 总体要求 4.1 一般规定 4.1.1 对作物生长环境参数波动范围有一定要求、工程规模较大、分布范围较广、人工控制操作复杂,且经济条件较好,具有特殊要求的节水灌溉工程,宜采用自动控制系统。 4.1.2 节水灌溉工程自动控制系统,应符合下列规定: a)实用可靠、技术设备先进、操作维护简单; b)具有手动控制的功能; c)根据土壤含水率变化能自动调节灌溉时间或停止灌溉; d)系统响应时间不超过1s; e)平均无故障时间不小于8712h/a,系统维修时间不大于48h/a; f)出现管道破裂等故障时能及时停机。 4.2 系统类型 4.2.1 集中式控制系统 4.2.1.1 系统应设置单台灌溉控制器或计算机并配置相应的数据采集与控制接口设备。
第4章 数字频率合成器的设计分析
第4章数字频率合成器的设计 随着通信、雷达、宇航和遥控遥测技术的不断发展,对频率源的频率稳定度、频谱纯度、频率范围和输出频率的个数提出越来越高的要求。为了提高频率稳定度,经常采用晶体振荡器等方法来解决,但它不能满足频率个数多的要求,因此,目前大量采用频率合成技术。 频率合成是通信、测量系统中常用的一种技术,它是将一个或若干个高稳定度和高准确度的参考频率经过各种处理技术生成具有同样稳定度和准确度的大量离散频率的技术。频率合成的方法很多,可分为直接式频率合成器、间接式频率合成器、直接式数字频率合成器( DDS)。直接合成法是通过倍频器、分频器、混频器对频率进行加、减、乘、除运算,得到各种所需频率。该方法频率转换时间快(小于100ns),但是体积大、功耗大,目前已基本不被采用。 锁相式频率合成器是利用锁相环(PLL)的窄带跟踪特性来得到不同的频率。该方法结构简化、便于集成,且频谱纯度高,目前使用比较广泛。 直接数字频率合成器(Direct Digital Frequency Synthesis简称:DDS)是一种全数字化的频率合成器,由相位累加器、波形ROM,D/A转换器和低通滤波器构成,DDS技术是一种新的频率合成方法,它具有频率分辨率高、频率切换速度快、频率切换时相位连续、输出相位噪声低和可以产生任意波形等优点。但合成信号频率较低、频谱不纯、输出杂散等。 这里将重点研究锁相式频率合成器。本章采用锁相环,进行频率
合成器的设计与制作。 4.1 设计任务与要求 1.设计任务:利用锁相环,进行频率合成器的设计与制作 2.设计指标: (1)要求频率合成器输出的频率范围f0为1kHz~99kHz; (2)频率间隔 f 为1kHz; (3)基准频率采用晶体振荡频率,要求用数字电路设计,频率稳定度应优于10-4; (4)数字显示频率; (5)频率调节采用计数方式。 3.设计要求: (1)要求设计出数字锁相式频率合成器的完整电路。 (2)数字锁相式频率合成器的各部分参数计算和器件选择。 (3)画出锁相式数字频率合成器的原理方框图、电路图 (4)数字锁相式频率合成器的仿真与调试。 4.制作要求: 自行装配和调试,并能发现问题解决问题。测试主要参数:包括晶体振荡器输出频率;1/M分频器输出频率;1/N可编程分频器的测试;锁相环的捕捉带和同步带测试。 5.课程设计报告要求。 写出设计与制作的全过程,附上有关资料和图纸,有心得体会。 6.答辩要求
控制器硬件开发程序
控制器硬件开发程序 1.0 目的 对控制器的硬件开发的全过程实施有效控制,确保开发出的控制器的硬件能够满足客户的要求和相应的国家标准。 2.0 范围 适用于控制器新产品的开发、定型产品的改进等。 3.0 职责 在有设计需求的情况下成立开发小组,小组成员由产品开发主管、硬件工程师、测试工程师和可靠性工程师组成。 产品开发主管负责编制并监督执行项目开发计划,以及设计和开发过程的组织,协调和管理工作,组织设计评审、设计验证、设计确认工作。 硬件工程师负责硬件电路的选型、设计、PCB板设计及调试工作。 测试工程师负责硬件电路样机及成品的测试工作。 可靠性工程师负责硬件电路的可靠性设计和验证工作。 4.0 工作程序 4.1 开发小组的成立 产品开发主管根据开发任务组建硬件开发小组,编制《硬件产品开发计划》,计划经上级批准后开始实施。《硬件产品开发计划》包括以下内容: ? 设计和开发的阶段。 ? 适合各阶段的设计评审、验证和确认活动以及这些活动所需的资料等。 ? 每个阶段的任务、责任人、进度要求。 《开发计划》应随设计和开发进展的调整而及时更新,经项目组同意后报上级人员批准后执行。 4.2 设计输入 4.2.1 《设计技术任务书》的编写 开发主管根据开发任务要求编制《硬件设计技术任务书》,《硬件设计技术任务书》应明确规定对设计的要求,内容可包括:
? 产品的功能、性能和结构要求。 ? 被控对象对硬件电路的控制要求。 ? 硬件电路的使用环境要求。 ? 线路板的形状、尺寸、安装要求。 ? 被控对象的特殊保护要求。 ? 输入信号的数量、类型。 ? 输出信号的数量、类型、负载能力等。 ? 电源的类型和要求。 ? 通信方式、协议要求。 ? 需通过的检验标准。 ? 以及其它所必需的要求,如安全、包装、贮存、经济性等方面的要求等。 4.2.2 《硬件设计技术任务书》的评审 由产品开发主管组织有关技术人员对《硬件设计技术任务书》进行评审。对其中不完善、不合理的要求予以解决。评审内容可以包括对《硬件设计技术任务书》中的一些要求的确认: ? 确认其内容是否符合被控对象的控制要求。 ? 确认其内容是否符合可靠性设计的要求。 ? 确认其内容是否符合所适用的标准。 ? 控制要求是否合理、可行。 4.3 设计输出和设计评审 4.3.1 初步技术设计 设计人员根据《硬件设计技术任务书》的要求编制《硬件设计方案说明书》,包括绘制硬件电路原理图、主要元器件选用方案,如有必要,进行相关的计算。 4.3.1.1 《硬件设计方案说明书》 《硬件设计方案说明书》的内容包括: 硬件电路的主要部件或主要模块、主要工作原理、国内外同类产品水平分析比较以及与现有产品的异同点比较、关键元器件、特殊材料、货源分析、成本方面的分析等等。 4.3.2 初步技术设计评审
直接数字频率合成器开题报告
毕业设计(论文)开题报告 题目基于FPGA的直接数字频率合成 专业名称通信工程 班级学号09042138 学生姓名周忠 指导教师刘敏 填表日期2013 年 1 月8 日
一、选题的依据及意义: 直接数字频率合成器(Direct Digital Frequency Synthesizer)是一种基于全数字技术,从相位概念出发直接合成所需波形的一种频率合成技术。其电路系统具有较高的频率分辨率,可以实现快速的频率切换(<20ns),频率分辨率高(0.01HZ),频率稳定度高,输出信号的频率和相位可以快速程控切换,输出相位可连续,可编程以及灵活性大等优点。DDS技术很容易实现频率、相位和幅度的数控调制,广泛用于接收本振、信号发生器、仪器、通信系统、雷达系统等,尤其适合调频无线通信系统 本课题使用可编程器件实现直接数字频率合成设计,它比传统的数字频率合成方式有着显著的优越性,与传统的频率合成器相比,DDS具有低成本、低功耗、高分辨率和快速转换时间等优点,广泛使用在电信与电子仪器领域,是实现设备全数字化的一个关键技术。 二、国内外研究概况及发展趋势(含文献综述): 直接数字频率合成(DDS)技术是第三代频率合成技术。20世纪70年代以来,随着数字集成电路和电子技术的发展,出现了一种新的合成方法——直接数字频率合成。它从相位的概念出发进行频率合成,采用了数字采样存储技术,具有精确的相位,频率分辨率,快速的转换时间等突出优点,是频率合成技术的新一代技术。直接数字频率合成作为新一代数字频率技术发展迅速,并显示了很大的优越性,已经在军事和民用领域得到广泛的应用,例如在雷达(捷变频雷达、有源相控雷达、低截获概率雷达)、通信(跳频通信、扩频通信)、电子对抗(干扰和反干扰)、仪器和仪表(各种合成信号源)、任意波形发生器、产品测试、冲击和振动、医学等方面的应用。 DDS技术作为一项具有广泛前景和生命力的频率合成技术,越来越受到人们的重视。随着微电子技术的飞速发展,国外一些大公司Qualcomm、ADI等竞相推出DDS芯片,来满足设计人员的要求。许多性能优良的DDS产品不断的推向市场。 Qualcomm公司推出了DDS系列Q2220Q2230等其中Q2368的时钟频率
数字PID控制器设计制作(附答案)
数字PID控制器设计 设计任务: 设单位反馈系统的开环传递函数为: 设计数字PID控制器,使系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。采用增量算法实现该PID控制器。 具体要求: 1.采用Matlab完成控制系统的建立、分析和模拟仿真,给出仿真结果。 2.设计报告内容包含数字PID控制器的设计步骤、Matlab仿真的性能曲线、采样周期T的选择、数字控制器脉冲传递函数和差分方程形式。 3.设计工作小结和心得体会。 4.列出所查阅的参考资料。
数字PID控制器设计报告 一、设计目的 1 了解数字PID控制算法的实现; 2 掌握PID控制器参数对控制系统性能的影响; 3 能够运用MATLAB/Simulink 软件对控制系统进行正确建模并对模块进行正确的参数设置; 4 加深对理论知识的理解和掌握; 5 掌握计算机控制系统分析与设计方法。 二、设计要求 1采用增量算法实现该PID控制器。 2熟练掌握PID设计方法及MATLAB设计仿真。 三、设计任务 设单位反馈系统的开环传递函数为: 设计数字PID控制器,使系统的稳态误差不大于0.1,超调量不大于20%,调节时间不大于0.5s。采用增量算法实现该PID控制器。 四、设计原理 1.数字PID原理结构框图
2. 增量式PID 控制算法 ()()()()()01P I D i u k K e k K e i K e k e k ∞ ==++--????∑ =u(k-1)+Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)] =u(k-1)+(Kp+Ki+Kd)e(k)-(Kp+2Kd)e(k-1)+Kde(k-2) 所以Δu(k)=u(k)-u(k-1) =Kp[e(k)-e(k-1)]+Kie(k)+Kd[e(k)-2e(k-1)+e(k-2)] =(Kp+Ki+Kd)e(k)-(Kp+2Kd)e(k-1)+Kde(k-2) 整理: Δu(k)= Ae(k)-Be(k-1)+Ce(k-2) A= Kp+Ki+Kd B=-(Kp+2Kd ) C=Kd 五、Matlab 仿真选择数字PID 参数 (扩充临界比例度法/扩充响应曲线法 具体整定步骤) 利用扩充临界比例带法选择数字PID 参数,扩充临界比例带法是 以模拟PID 调节器中使用的临界比例带法为基础的一种数字 PID 参数的整定方法。其整定步骤如下:;
半导体温度控制仪软硬件设计
半导体温度控制仪软硬件设计 1.1系统的性能要求及特点 1.1.1功能要求 半导体温度控制仪应能达到以下功能要求: (1)可以人为方便地设定所需控制的温度值,温控仪器能自动将电炉加热至此设定值并能保持,直至重新设定为另一温度值; (2)能够单独实现测量电炉温度的作用; (3)整套仪器可靠性好,设计不易出故障; (4)具有自动加热保护功能的安全性要求。如果实际测得的温度值超过了系统要求的温度范围,单片机就会发出指令,从而进行超温或者降温保护; (5)能够实现系统软件的在线升级,无需对温控仪拆卸即可完成软件的升级及在线调试; (6)尽量采用典型、通用的器件,一旦损坏,易于在市场上买到同样零部件进行替换。 1.1.2系统特点 基于上述功能要求及智能仪表应具有的体积小、成本低、功能强、抗干扰并尽可能达到更高精度的要求。本系统在硬件设计方面具有如下特点:本温度控制仪的面板设计遵循简洁实用的原则,为便于使用人员的操作,系统采用了非固定键值意义的状态键盘,一键多用。系统软件可根据当前所处状态,自动确定键值的具体含义。 以往单片机系统在软件升级及故障调试时,必须将CPU芯片从系统板上拆下来进行软件固化。针对这种弊端,系统硬件设计时预留有程序下载接口,可以在不拆下CPU芯片的情况下直接进行软件升级和在系统调试,以方便日后的软件维护和功能调试。 整个系统遵循了冗余原则及以软代硬的原则,并尽可能选用典型、常用、易于替换的芯片和电路,为系统的开放性、标准化和模块化打下良好基础。系统扩展和配置在满足功能要求的基础上留有适当裕量,以利于扩充和修改[17][18]。 1.2系统的硬件总体结构 半导体温度控制仪的硬件电路主要由单片机系统、温度采样电路、温度设定电路、比例积分电路、TEC驱动电路、报警电路、键盘显示电路以及接口电
PID控制器设计
PID 控制器设计 一、PID 控制的基本原理和常用形式及数学模型 具有比例-积分-微分控制规律的控制器,称PID 控制器。这种组合具有三种基本规律各自的特点,其运动方程为: dt t de dt t e t e t m K K K K K d p t i p p ) ()()()(0 ++=? (1-1) 相应的传递函数为: ??? ? ??++=S S s K K K G d i p c 1)( S S S K K K d i p 1 2 ++? = (1-2) PID 控制的结构图为: 若14 二、实验内容一: 自己选定一个具体的控制对象(Plant),分别用P 、PD 、PI 、PID 几种控制方式设计校正网络(Compensators ),手工调试P 、I 、D 各个参数,使闭环系统的阶跃响应(Response to Step Command )尽可能地好(稳定性、快速性、准确性) 控制对象(Plant)的数学模型: ()()??? ? ??++=115.01 )(S S S G 2 322++=S S 实验1中,我使用MATLAB 软件中的Simulink 调试和编程调试相结合的方法 不加任何串联校正的系统阶跃响应: (1) P 控制方式: P 控制方式只是在前向通道上加上比例环节,相当于增大了系统的开环增益,减小了系统的稳态误差,减小了系统的阻尼,从而增大了系统的超调量和振荡性。 P 控制方式的系统结构图如下: 取Kp=1至15,步长为1,进行循环测试系统,将不同Kp 下的阶跃响应曲线绘制在一张坐标图下: 课程设计 课程名称:通信原理课程设计 设计名称:基于400MSPS 14-Bit,1.8VCMOS直接 数字合成器AD9951 专业:班级: 姓名:学号: 400 MSPS 14-Bit, 1.8 V CMOS 直接数字合成器AD9951 Abstract: The AD9951 is a direct digital synthesizer (DDS) featuring a 14-bit DAC operating up to 400 MSPS. The AD9951 uses advanced DDS technology, coupled with an internal high speed, high performance DAC to form a digitally programmable, complete high frequency synthesizer capable of generating a frequency-agile analog output sinusoidal waveform at up to 200 MHz. The AD9951 is designed to provide fast frequency hopping and fine tuning resolution (32-bit frequency tuning word). The frequency tuning and control words are loaded into the AD9951 via a serial I/O port. The AD9951 is specified to operate over the extended industrial temperature range of –40°C to +105°C.Synchronizing Multiple AD9951s , The AD9951 product allows easy synchronization of multiple AD9951s. There are three modes of synchronization available to the user: an automatic synchronization mode, a software controlled manual synchronization mode, and a hardware controlled manual synchronization mode. Applications, Agile LO frequency synthesis, Programmable clock generators, Test and measurement equipment ,Acousto-optic device drivers. T he AD9951 supports various clock methodologies. Support for differential or single-ended input clocks and enabling of an on-chip oscillator and/or a phase-locked loop (PLL) multiplier are all controlled via user programmable bits. 摘要: AD9951是一个直接数字频率合成器(DDS),其特色是有一个工作在400MSPS的14位数/模转换器(14-bit DAC). AD9951采用了先进的DDS技术,芯片内部有一个高速的,高性能的DAC,能够形成一个数位可编程的,完整的高频合成器DDS系统,有能力产生频率达200 MHz 的模拟正弦波。AD9951可提供快速频率跳变和高精度分辩率(32位频率控制字)。频率调谐和控制字经并行口或串行口输入到AD9951。 在工业应用中,AD9951的工作温度为–40°C到+105°C。同时并联发生AD9951,存在三种可能得到的同步方式电路∶自动同步方式,软件控制手控同步方式,硬件控制手控同步方式。AD9951可以应用于本机振荡频率合成,可编程时钟发生器,测试和测量装置,声光器件驱动装置。AD9951在不同的时钟脉冲下有不同的操作方法。适合于差动或单端输入时钟脉冲并启动芯片内部振荡器及锁相环路(锁相环)放大器全部控制经由用户可编程序的位。 Key words: automatic synchronization mode software controlled manual synchronization mode a hardware controlled manual synchronization mode Support for differential input clocks Common-mode noise increased signal-to-noise ratio 关键字:自动同步方式软件控制手控同步方式 硬件控制手控同步方式差动输入时钟脉冲 共模噪声信噪比 (建筑工程设计)出入口控制系统工程设计规范 会(SAC/TC100)负责具体技术内容的解释工作。在应用过程中如有需要修改和补充之处,请将意见和有关资料寄送全国安全防范报警系统标准化技术委员会秘书处(北京市海淀区首都体育馆南路一号,邮政编码:100044,电话:010-8,传真010-0,E-mail:)以供修订时参考。 本规范主编单位、参编单位和主要起草人员: 主编单位:全国安全防范报警系统标准化技术委员会 参编单位:北京艾克塞斯科技发展有限责任公司 北京天龙控制系统公司 主要起草人:朱峰刘希清施巨岭何培重 目次 1总则 (1) 2术语 (2) 3基本规定 (6) 4系统构成 (8) 5系统功能、性能设计………………………………………(I3) 5.1一般规定 (13) 5.2各部分功能、性能设计 (15) 6设备选型与设置 (17) 7传输方式、线缆选型与布线 (18) 8供电、防雷与接地 (19) 9系统安全性、可靠性、电磁兼容性、环境适应性 (20) 10监控中心 (21) 附录A设计流程与深度 (22) 附录B系统防护等级分类 (28) 附录C常用识读设备选型要求 (34) 附录D常用执行设备选型要求 (38) 本规范用词说明………………………………………………(4o) 附:条文说明 (41) 1总则 1.0.1为了规范出入口控制系统工程的设计,提高出入口控制系统工程的质量,保护公民人身安全和国家、集体、个人财产安全,制定本规范。 1.0.2本规范适用于以安全防范为目的的新建、改建、扩建的各类建筑物(构筑物)及其群体的出人口控制系统工程的设计。 1.0.3出人口控制系统工程的建设,应与建筑及其强、弱电系统的设计统一规划,根据实际情况,可一次建成,也可分步实施。 1.0.4出人口控制系统应具有安全性、可靠性、开放性、可扩充性和使用灵活性,做到技术先进,经济合理,实用可靠。 1.0.5出人口控制系统工程的设计,除应执行本规范外,尚应符合国家现行有关技术标准、规范的规定。 2术语 2.0.1出人口控制系统accesscontrolsystem(ACS)利用自定义符识别或/和模式识别技术对出入口目标进行识别并控制出入口执行机构启闭的电子系统或网络。 2.0.2目标object通过出入口且需要加以控制的人员和/或物品。 2.0.3目标信息objectinformation赋予目标或目标特有的、能够识别的特征信息。数字、直接数字合成器通信原理课程设计
[建筑工程设计]出入口控制系统工程设计规范