A32 机器使用说明书(v4.0)

可视门禁门口机(联网型)
使用说明书V4.0
一 产品功能和主要参数
1.1功能简介
联网型可视门禁门口机是一款采用非接触式感应卡和密码进行出入管制的门禁门口机,内部集成了可视对讲电路,外接分机即可实现可视对讲功能。。整个系统使用简单、性能可靠。 1、 电镀透光按键,外壳UV 工艺,更美观,寿命更长;
2、 感应卡开门、感应卡加密码开门、密码开门三种开门方式;
3、 一组继电器干触点输出和一组PUSH (低电平)输出,可外接一组WG26读卡器;
4、 可通过485总线与电脑管理软件进行通讯,实现门禁记录的查询和考勤管理;
5、 内置高清晰的CCD 彩色摄像头;
6、 可外接彩色可视分机,实现视频对讲和开门功能; 1.2主要参数
二 门禁机状态说明
门口机出厂时的默认设置
三 安装和接线说明 3.1接线端子说明
JP1接线端子:
JP2接线端子:
JP3
接线端子: 3.2接线示意图
注:门口主机和室内分机之间要求采用RVV4×0.5以上的线。
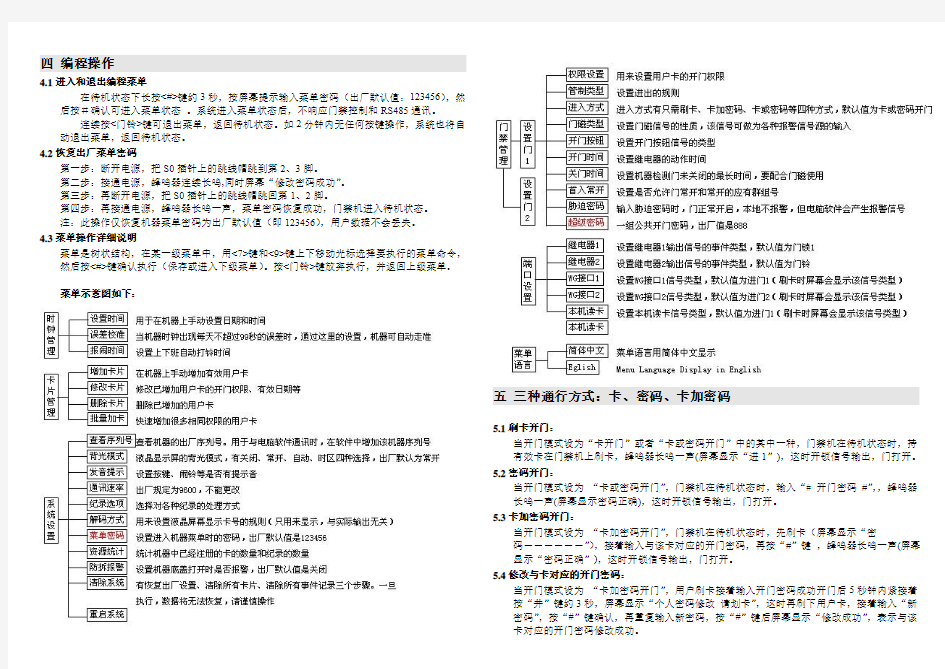
四编程操作
4.1进入和退出编程菜单
在待机状态下长按<#>键约3秒,按屏幕提示输入菜单密码(出厂默认值:123456),然后按#确认可进入菜单状态。系统进入菜单状态后,不响应门禁控制和RS485通讯。
连续按<门铃>键可退出菜单,返回待机状态。如2分钟内无任何按键操作,系统也将自动退出菜单,返回待机状态。
4.2恢复出厂菜单密码
第一步:断开电源,把S0插针上的跳线帽跳到第2、3脚。
第二步:接通电源,蜂鸣器连续长鸣,同时屏幕“修改密码成功”。
第三步:再断开电源,把S0插针上的跳线帽跳回第1、2脚。
第四步:再接通电源,蜂鸣器长鸣一声,菜单密码恢复成功,门禁机进入待机状态。
注:此操作仅恢复机器菜单密码为出厂默认值(即123456),用户数据不会丢失。
4.3菜单操作详细说明
菜单是树状结构,在某一级菜单中,用<7>键和<9>键上下移动光标选择要执行的菜单命令,然后按<#>键确认执行(保存或进入下级菜单)。按<门铃>键放弃执行,并返回上级菜单。
菜单示意图如下:
五三种通行方式:卡、密码、卡加密码
5.1刷卡开门:
当开门模式设为“卡开门”或者“卡或密码开门”中的其中一种,门禁机在待机状态时,持有效卡在门禁机上刷卡,蜂鸣器长鸣一声(屏幕显示“进1”),这时开锁信号输出,门打开。
5.2密码开门:
当开门模式设为“卡或密码开门”,门禁机在待机状态时,输入“# 开门密码#”,,蜂鸣器长鸣一声(屏幕显示密码正确),这时开锁信号输出,门打开。
5.3卡加密码开门:
当开门模式设为“卡加密码开门”,门禁机在待机状态时,先刷卡(屏幕显示“密
码――――――”),接着输入与该卡对应的开门密码,再按“#”键,蜂鸣器长鸣一声(屏幕显示“密码正确”),这时开锁信号输出,门打开。
5.4修改与卡对应的开门密码:
当开门模式设为“卡加密码开门”,用户刷卡接着输入开门密码成功开门后5秒钟内紧接着按“井”键约3秒,屏幕显示“个人密码修改请划卡”,这时再刷下用户卡,接着输入“新密码”,按“#”键确认,再重复输入新密码,按“#”键后屏幕显示“修改成功”,表示与该卡对应的开门密码修改成功。
Technical parameters
Operating voltage :DC12V Operating current :<300MA
Ambient temperature :-10℃~60℃ Card capacity :≤5000 users Record capacity :≤20000
Keyboard operation description:
Go menu: Press <#> for 5 seconds at the initial state to enter into the menu state (press valid PWD if it is set password, Default Menu PWD is: 123456). If you don ’t press the button within 3 minutes, the system will automatically escape from the menu and restore the initial interface. When the system is in the menu state, it will give no response to the door controller and RS485 communication.
Menu browse: The menu is in tree structure. In some submenu, <7> and <9> are used to choose the items up and down. The chosen item will be in white display. Press <#> key to fix the item setting, press < > to cancel the item setting and return to the high-authority menu.
Multiple choice and single choice: <7> key is to review upward, <9> key is to review downward; <#> key is to choose multiple choices or single choice; < > key is to escape the multiple choice or single choice and save the choice result.
Operation guide for PWD entry: Press <#> at the initial state and the screen displays the prompt to enter the password. Enter the PWD (from <0> to <9>) (Access PIN or Duress PIN, Default Access PWD is: 888), and press <#> key to confirm.
PWD modification: Read card and press the valid password, then press < > and <#>, stamp card again at the sight of the prompt quickly. Enter the new PWD two times. The personal PIN modification is successful.
Port signal caption:
JP1
JP3
typical application diagram:
Main Menu
|Clock
| |Set time
| |Adjust time
| | | Needless to adjust
| | | Adjust fast
| | | Adjust slow
| |Alarm clock
| | |CLK 01->
| | | |Enable
| | | |Alarm
| | | |Delay
| | | |Week Set Sunday Monday…Saturday
| | | 。。。
| | | CLK 16-> (Ditto)
| Card
| | Add card
| | Update card
| | Del card
| | Add multi-card
| System
| | Check ID
| | Back Light mode NC.、NO.、AUTO、Set Time
| | Beep hint Keys、Clock、Hints,
| | Baud rate 2400bps、4800bps、9600bps、19200bps | | Rec. option In rec.、Out rec.、Events、Cycle、| | Decode type All-4-byte、LSB-8-Bit、LSB-5-Bit
| | Menu PWD
| | Sys info
| | Clear…
| | Reset System
| Door
| | Door1
| | | Authority
| | | | Timer (0-31)
| | | | Time Zone (0-63)
机械说明书
摘要:本设计主要针对目前城市公交公司,银行等场所对于钱币分类处理的问题,目前许多地方对于钱币的分离都依赖于人工,人力成本高,且效率较低,本次设计就是对于硬币的分类整理的。本次设计的产品比较实用,精准,而且方便,可以代替人工,减少成本。 本次设计创新(1)可以将不同大小的硬币进行有效的分离(2)此作品结构严谨,能够精准的分离,整理硬币。 关键词:硬币的分离整理识别 1.1硬币清分机的课题背景 银行等一些特殊部门要对大量的硬币进行高效的处理,如计数、分类、包装等以使其再流通,无人售票车、投币电话等需要对硬币进行实时识别,自动售货机除了识别之外,还要提供找零功能等。而且在目前在世界范围内,硬币以其成本低,流通次数多、耐磨损、易回收等无可替代的优势将占领小面额货币市场是大势所趋。市场需要一种成熟可靠的硬币自动处理机具。鉴于此需要,我们研制用于处理上述问题的机具。 硬币清分机是金融行业设备中的用于清点硬币的技术产品,它的主要功能是硬币的计数和硬币币种的清分。目前主要适用于超市、公交、自动售货行业,零售业等行业。硬币清分机外型简单大方,设备原理清晰。操作简单易懂,价格适中,在超市,零售等行业颇受欢迎。 硬币清分机的最大优点在于它不仅可以清点硬币的数目,更能将各币种清分开来,并且面对不同的国家的硬币不需要调整软件,只需要调整机器的硬件设备就可以满足不同的国家的硬币清点需求。因此不仅占据了很大的市场份额,而且对于生产成本也有所降低。 1.1.1硬币分离器的简介 硬币分离器是对高速通过的硬币进行识别,计数,同时对伪币,残币进行剔除的系统,在这领域国外已经开展了研究,并做了了大量的工作,开发的产品大多分三个档次,低档,中档,高档。低档的清分速度在1000枚/rain以下,中档为1000-1500枚/rain,高档在1500枚/rain以上。所使用的分离方法注意就有两大类,一类物理技术清分,二类是性能指标清分。 1.2国内外硬币清分机发展现状 1.2.1国外硬币清分发展现状 硬币清分机至今已有30年的历史,发展到今天,硬币清分机已具有可靠的传动系统和先进的计数清分功能,其智能化的设计为解决硬币清点的困难提供了完美的选择。国外著名厂家有日本的荣光瑞典的SCANCOIN AB。
机械设备安全操作手册
城开高速B2合同段项目部机械设备安全操作手册 江西省交通工程集团公司 2017年8月
目录 设备安全操作规程总则................................. 错误!未指定书签。 一、设备安全管理的目的:............................................. 错误!未指定书签。 二、设备安全、事故的定义及简述:..................................... 错误!未指定书签。 三、生产过程中的安全:............................................... 错误!未指定书签。 1. 人员安全:...................................... 错误!未指定书签。 2. 设备安全:...................................... 错误!未指定书签。 3. 产品质量安全:.................................. 错误!未指定书签。 四、什么是事故....................................................... 错误!未指定书签。 事故发生的基本特点:................................ 错误!未指定书签。 五、引发事故的基本要素:............................................. 错误!未指定书签。 1. 人的不安全行为:................................ 错误!未指定书签。 2. 环境的不安全条件:.............................. 错误!未指定书签。 3. 物的不安全状态:................................ 错误!未指定书签。 六、生产中的设备安全管理:........................................... 错误!未指定书签。 1. 要求要严格遵守设备安全管理制度:................ 错误!未指定书签。 2. 设备管理人员的到位管理:........................ 错误!未指定书签。 3. 设备安全标识管理:.............................. 错误!未指定书签。 4. 定期制定消除隐患的改善计划:.................... 错误!未指定书签。 5. 设备操作中的安全事项:.......................... 错误!未指定书签。 七、工作中的安全注意事项:........................................... 错误!未指定书签。 八、总结............................................................. 错误!未指定书签。设备安全操作规程细则................................. 错误!未指定书签。 起重作业安全操作规程..................................................... 错误!未指定书签。 三臂凿岩台车安全操作规程................................................. 错误!未指定书签。 装载机使用操作规程....................................................... 错误!未指定书签。 混凝土湿喷机安全操作规程................................................. 错误!未指定书签。 砼搅拌楼(站)安全操作规程............................................... 错误!未指定书签。 砼车使用操作规程......................................................... 错误!未指定书签。 挖掘机使用操作规程....................................................... 错误!未指定书签。 维修人员安全技术操作规程................................................. 错误!未指定书签。 钢筋加工设备全操作规程................................................... 错误!未指定书签。 一、钢筋切断机安全操作规程...................... 错误!未指定书签。 二、钢筋弯曲机安全操作规程...................... 错误!未指定书签。 三、钢筋拉伸机安全操作规程...................... 错误!未指定书签。 四、钢筋冷拉机操作规程.......................... 错误!未指定书签。 编辑:罗雄军周剑张明伟审核:刘彬
机械使用说明书范本
目录 一.设备安全使用须知 (1) 二.机床简介 (3) 三.主要技术参数和连接尺寸 (4) 四.机床的吊运、安装及试车 (5) 五.主要部件结构性能及调整 (5) 六.液压系统 (6) 七.机床的润滑 (6) 八.机床的冷却-排屑系统 (7) 九.机床的调试与维修 (7) 十.易损件清单 (8) 十一.机床的工作环境 (28) 注: 图一.HTC6330b机床地基图 (9) 图二.机床占地面积图 (10) 图三.机床外观图 (11) 图四.机床吊运图 (12) 图五.HTC6330b数控车床加工尺寸及刀具干涉图 (13) 图六.主轴箱结构图 (14) 图七.X轴滑板 (17) 图八.液压卡盘系统 (18) 图九.Z轴丝杠连接图 (19) 图十.主轴连接尺寸 (20) 图十一.卡盘座尺寸图 (22) 图十二.液压原理图 (24) 图十三.导轨润滑装置 (25) 图十四.主轴润滑 (26) 图十五.冷却装置 (27)
HTC6330b 使用说明书一、设备安全使用须知 对于生产企业来讲,没有什么比安全工作更重要的了。为此,在机床使用说明书正文之前,制定本安全说明。 请尊敬的用户,在读正文之前,认真阅读并能领会,那将是我们的共同的幸福。 1.设备的使用 除非之前已受过培训并授权的人员进行特殊维修工作时,否则不得在设备防护罩松动或被取掉的情况下使用该机床。 该机床是为完成一系列具体操作而设计的。在质量保证期内,未经生产厂家授权,不得对设备进行任何形式的改装或用于其它超出机床使用范围的用途。 该机床是自动循环起动的,不得在机床的任何部位(尤其是机床移动部位)放置工具、工件及其它物品。刀具及其它设置一定要在处于夹紧状态时才可使用。 2.人员培训 机床若由人员不恰当的使用将会是很危险的,所以,在机床的安全使用,调整,操作及维修方面对其人员进行充分培训是完全必要的。 3.人员防护服 为了安全起见,应使用并爱护好您的防护服装及用具。在该机床工作事,切勿穿松垮的衣服,应去掉珠宝首饰并将长发挽到后面,戴安全防护眼镜并穿安全工作鞋。 4.防护罩--包括观察窗 在机床工作期间,所有的防护罩始终都应在位并处于牢固安全状态。防护罩上所带的观察窗应始终保持清洁,该观察窗是用特殊安全材料制成的,不得用其它材料替代。全部防护罩的目的在于最大程度减小加工时液体和铁屑飞溅的危险但并不能完全消除。 5.互锁及保护装置 为了保证您的安全,该机床配备了各种安全互锁及保护装置,切勿以任何方式干扰这类装置。紧急情况时,应立即使用紧急停止按扭。 6.安全用电 电是一种危险的物质并可致人于死命。 机床在进行清洁、检查故障、或停机以及进行任何调整之前一定要将主电源置于关闭(OFF)状态,这不会影响计算机存储器的存储功能,因为里面装有后备电池。 当机床突然断电时需重新送电之前,机床转塔刀架务必要先行返回原点位置。 7.液压系统 机床液压系统是在高,中压状态下工作的,其中有些部件即使是在机床停机的情况下也处于压力状态。所以对液压系统及其部件进行修理时一定要小心谨慎。 皮肤长期与液压油接触有可能会导致皮炎及过敏反应,当必需与其接触时,必须陪带整齐的防护用品。 8. 切削液 切削液里很容易滋生大量的细菌,设备上可能由此生成大量的粘液,机油和淤泥,并带有相关的异味因此要经常更换切削液。清除切削液及油污时应配带安全的防护设备和服装。尽量避免接触污油和切削液。9.润滑油 当不可避免地要接触油品时,则应使用维护很好的人体防护设备,护手霜并穿戴防护服。要严格遵守车间卫生纪律,尽快的将油从皮肤上清洗干净。切勿穿戴经油污浸泡过的衣物,且不要在口袋里装有油的碎纸布或手帕。 10.除油剂的使用 皮肤长期与除油剂接触有可能会导致皮炎。所以应避免与任何除油剂不必要的接触,当不可避免地要接触除油剂时,则应使用维护很好的人体防护设备,护手霜并穿戴防护服。要严格遵守车间卫生纪律,尽快的将油从皮肤上清洗干净。 11.压缩空气 2沈阳第一机床厂
自动机器人平台使用说明手册
2011年全国职业院校技能大赛高职组机器人赛项 自动机器人平台说明
目录 第一章自动机器人平台概述 (3) 1.1 自动机器人平台的总体构成 (3) 1.2 自动机器人平台按键部分 (4) 1.3 机器人平台的充电 (4) 第二章自动机器人平台系统结构 (4) 2.1自动机器人平台机械部分 (4) 2.1.1 机器人平台机械部分组成 (4) 2.1.2 机器人平台运动详解 (5) 2.2 自动机器人平台控制系统 (5) 2.2.1 概述 (5) 2.2.2 主控制板 (5) 2.2.3 巡线传感器 (9) 2.2.4 传感器信号处理板 (10) 2.2.5 电机驱动板 (12) 2.3 机器人平台控制程序 (14) 2.3.1 控制程序流程图 (15) 2.3.2 软件函数说明 (17) 第三章自动机器人平台的装配和调试 (18) 3.1 机器人装配过程 (18) 3.1.1 主动轮电机装配 (18) 3.1.2 电机安装至铝合金架板 (18) 3.1.3 从动轮及传感器安装 (19) 3.1.4 电路板的安装 (19) 3.2 机器人平台的调试 (21)
第一章自动机器人平台概述 自动机器人平台是专门为高职类机器人大赛提供的一个统一的机器人底盘,可以实现在比赛场地全场范围内的运动、定位;并提供了充足的I/O接口,参赛队可以根据大赛任务的要求,在此平台上进一步设计制作各种抓取、投放机构,利用机器人平台提供的主控制板和编程算法实现整体机器人的控制。 1.1 自动机器人平台的总体构成 机器人平台的总体构成参见图1-1和图1-2所示,由包括主动车轮、从动车轮、铝合金框架、直流电机、电池、电路板以及安装在底部的16路传感器组成。 图1-1 自动机器人平台的总体构成 图1-2 自动机器人平台的侧面图
(机械制造行业)发动机装配线使用说明书机械
目录1. 1. 概述 1-1.系统名称 1-2.生产线工作内容 1-3.生产能力 1-4.必备条件 1-5.机器油漆颜色 1-6.设计标准 2. 2. WD615/WD415发动机装配线组成 2-1. 系统简介 2-2. 结构说明 3.3. 装配线工作过程简述及主要注意事项 3-1. 工作过程简述 3-2. 主要注意事项 4. 4. 安装 4-1. 装配线安装 4-2. 升降机安装 4-3. 180°(90°)翻转机的安装 4-4. 缸盖装配线的安装 5. 5. 维护 5-1. 传送线辊子维护 5-2. 线体维护 5-3. 气动系统维护 5-4. 润滑期 5-5. 润滑油 6. 6. 排故与检修 7.7. 电气控制系统 8.8. 图纸资料
1. 概述 1-1. 系统名称: WD615/WD415发动机装配线 1-2. 生产线完成内容: 欧III机型、欧II机型、直列四缸柴油机装配线,完成发动机上各零部件的装配,包装前的准备工作。 1-3. 生产能力 -生产量(生产目标) : 6万台/年(2班制) -每年工作日: 250 日 -日工作时间 : 16小时 -生产效率:85% -节拍:≤3分钟 1-4. 必备条件 1) 压缩空气 在端点处空气供应为5 Kg/cm2 2)提供电源 AC220V;50Hz 1-5.设备油漆颜色 1)机用: RAL 9002 1-6. 设计标准 1) GB (中国标准) 2) KS (韩国工业标准) 3) JIS (日本工业标准) 4) ISO (国际标准化组织) 2. 装配线组成 装配线线长270m,为柔性直线环行输送,单层滚道及地下输送线。单层滚道为装配作业输送滚道,托盘用上线吊车在起始工位上线,单层线设有92个装配工位,单层线起始端和末端人工通过自行小车上下料,中间由两个180°翻转机、两个90°翻转机半自动翻转,实现
机器人操作指南
第七章工业机器人应用 一机器人示教单元使用 1.示教单元的认识 2.使用示教单元调整机器人姿势 2.1在机器人控制器上电后使用钥匙将MODE开关打到“MANUAL”位置,双手拿起,先将示教单元背部的“TB ENABLE”按键按下。再用手将“enable”开关扳向一侧,直到听到一声“卡嗒”为止。然后按下面板上的“SERVO”键使机器人伺服电机开启,此时“F3”按键上方对应的指示灯点亮。
2.2按下面板上的“JOG”键,进入关节调整界面,此时按动J1--J6关节对应的按键可使机器人以关节为运行。按动“OVRD↑”和“OVRD↓”能分别升高和降低运行机器人速度。各轴对应动作方向好下图所示。当运行超出各轴活动范围时发出持续的“嘀嘀”报警声。 2.3按“F1”、“F2”、“F3”、“F4”键可分别进行“直交调整”、“TOOL调整”、“三轴直交调整”和“圆桶调整”模式,对应活动关系如下各图所示:
直交调整模式TOOL调整模式
三轴直交调整模式
圆桶调整模式 2.4在手动运行模式下按“HAND”进入手爪控制界面。在机器人本体内部设计有四组双作用电磁阀控制电路,由八路输出信号OUT-900――OUT-907进行控制,与之相应的还有八路输入信号IN-900――IN-907,以上各I/O信号可在程序中进行调用。 按键“+C”和“-C”对应“OUT-900”和“OUT-901” 按键“+B”和“-B”对应“OUT-902”和“OUT-903” 按键“+A”和“-A”对应“OUT-904”和“OUT-905” 按键“+Z”和“-Z”对应“OUT-906”和“OUT-907” 在气源接通后按下“-C”键,对应“OUT-901”输出信号,控制电磁阀动作使手爪夹紧,对应的手爪夹紧磁性传感器点亮,输入信号到“IN-900”;按下“+C”键,对应“OUT-900”输出信号,控制电磁阀动作使手爪张开。对应的手爪张开磁性传感器点亮,输入信号到“IN-901”。 3.使用示教单元设置坐标点 3.1先按照实训2的内容将机器人以关节调整模式将各关节调整到如下所列: J1:0.00 J5:0.00 J2: -90.00 J6:0.00 J3:170.00 J4:0.00 3.2先按“FUNCTION”功能键,再按“F4”键退出调整界面。然后按下“F1”键进入