东莞市孺子牛机器人有限公司M-410iB-700机器人规格参数表及图纸
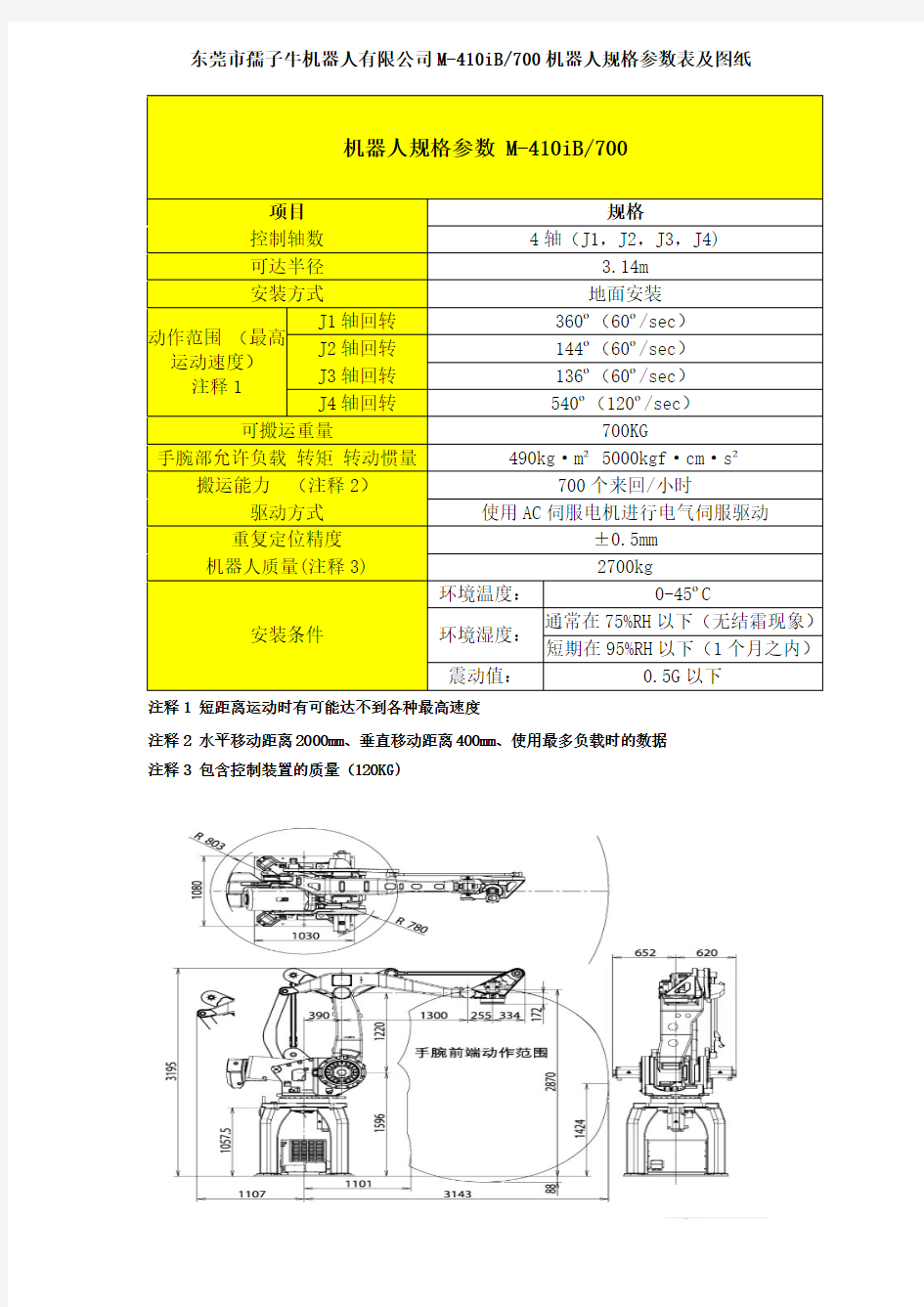
东莞市孺子牛机器人有限公司M-410iB/700机器人规格参数表及图纸
机器人规格参数
M-410iB/700
项目 规格
控制轴数 4轴(J1,J2,J3,J4)
可达半径 3.14m 安装方式
地面安装 动作范围 (最高
运动速度)
注释1
J1轴回转
360o(60o/sec ) J2轴回转
144o(60o/sec ) J3轴回转
136o(60o/sec ) J4轴回转
540o(120o/sec )
可搬运重量
700KG
手腕部允许负载 转矩 转动惯量
490kg ·m 2 5000kgf ·cm ·s 2
搬运能力 (注释2)
700个来回/小时
驱动方式 使用AC 伺服电机进行电气伺服驱动
重复定位精度 ±0.5mm 机器人质量(注释3)
2700kg
安装条件
环境温度: 0-45oC
环境湿度:
通常在75%RH 以下(无结霜现象)
短期在95%RH 以下(1个月之内)
震动值: 0.5G 以下
注释1 短距离运动时有可能达不到各种最高速度
注释2 水平移动距离2000mm 、垂直移动距离400mm 、使用最多负载时的数据 注释3 包含控制装置的质量(120KG)
擦玻璃机器人方案
擦玻璃机器人方案 随着城市现代化发展,特别是高层建筑的兴起,以玻璃壁而为代表的壁面结构逐渐演绎成华丽的“城市外衣”,山此衍生出繁重的壁面清洗任务,并目许多国家已对建筑壁面的清洗要求做出了明确规定。另一方面,越来越奇特的建筑结构使清洗的难度成倍增加,甚至采用传统的清洗方法已无能为力。然而,在社会文明高度发展的今天,对生命的关爱达到了前所未有的高度,要求停止使用蜘蛛人的呼声不绝于耳,因此人们期待新的具有人性化的清洗方式出现。 如此,将爬壁机器人应用于高楼玻璃壁面清洗的问题就成为热点研究课题。壁面清洗机器人也属于移动式服务机器人的一种,可在垂直壁而及屋顶移动进行物体表面的清洗作业。壁面清洗机器人的使用将大大降低高层建筑的清洗成木,改善工人的劳动环境,提高劳动产生产率,具有相当的社会、经济意义和广阔的应用前景。而目前针对此类机器人的研究还没有比较成熟、可靠的方案。 创新设计的智慧型擦玻璃机器人,结合安全设计可让机器完全吸附于玻璃表面自由行。机器人除了会规则路径、侦测窗框、自动清洁窗户,并可透过手动遥控模式,让操控机器更方便,另搭配可替换的清洁布让清洁玻璃成了轻松又有趣的事。 传统擦拭玻璃除了费力外更是需要守候费时定在窗户边,擦玻璃机器人采用人工智能技术,除了会自动导航路径外,还能自动擦完整片玻璃后自动停止,让你可以一边清洁一边看报纸或者和朋友聊天。 擦玻璃机器人比你更重视安全,结合安全设计及原理让擦玻璃机器人能紧紧吸附并自由行走在垂直玻璃,擦玻璃机器人使用UPS不断电系统,就算突然断电也不会掉落,使用起来超放心。 擦玻璃机器人是新一代创新设计智慧型单面擦玻璃机器人。它具有一个真空马达可让机器完全吸附于玻璃表面,并于垂直的玻璃表面上自由行走亦无玻璃厚度值限制使用。 产品特点 采用永磁式磁铁对吸,断电不掉落 三种自动模式选择:三种芳香,自动清洁全窗三种速度选择手动操作模式遥控器操作
常用施工材料规格表整理—LXLX
常用钢的类型和防腐木的规格 一、工字钢(热轧)h X b X d (高X宽X壁厚) 工100x68x4.5 工120x74x5 工140x80x5.5 工160x88x6 工180x94x6.5 工200x100x7.0 工220x110x7.5 工240x116x8 工250x116x8 二、等边角钢(热轧) ∠25x3(4) ∠30x3(4) ∠40x3(4;5) ∠45x3(4;5;6) ∠50x3(4;5;6) ∠56x3(4;5;6) ∠63x3(4;5;8;10) ∠70x4(5;6;7;8) ∠75x5(6;7;8;10) ∠80x5(6;7;8;10) ∠90x6(7;8;10;12) ∠100x6(7;8;10;12;14;16) ∠110x8(10;12;14) ∠125x8(10;12;14) ∠140x10(12;14) ∠160x12(14;16;18) ∠180x18 ∠200x24 三、不等边角钢 ∠30x20x3(4) ∠50x32x3(4) ∠56x36x3(4;5) ∠63x40x4(5;6;7) ∠75x50x5(6;8;10) ∠90x56x5(6;7;8) ∠100x63x6(7;8;10) ∠125x80x7(8;10;12) ∠140x90x8(10;12;14) 四、方钢(冷弯方形空心型钢)
□20x20x2 □30x30x3 □40x40x4 □50x50x4 □60x60x4 □70x70x4 □80x80x4 □90x90x4 □100x100x4 □120x120x6 □125x125x6 □140x140x10 □150x150x6 □160x160x10 □180x180x8 □200x200x8□220x220x10 □250x250x10 五、矩形钢(冷弯矩形空心型钢) 40x20x2 50x30x3 60x40x3 80x40x3 90x60x4 100x60x4 110x70x5 120x80x4 140x80x4 160x80x6 180x100x6 200x100x8附表:
擦玻璃机器人报告
擦玻璃清洗机 摘要 本文主要介绍了擦玻璃清洗机结构部分和采用相关技术以及预测研究成果前景,还有设计任务分配。 关键词 擦玻璃清洗机真空吸附机器手机器脚中间体 1 引言 近年来,随着国内经济的发展,城市高层建筑成倍的增长,由于高层外壁的玻璃随着时间的延长,外壁玻璃上增加了许多的粉尘和其他污物。至今,有95%城市高楼玻璃外壁采用的是人工清洗完成,它不仅投入大,效率低,费工时时,而且极其危险,因此我们小组决定设计一种能携带清洗装置或其他功能在高楼玻璃外壁移动的机器。代替人进行高空作业,使人脱离人生安全的危险自动化的机器。我们采用了吸盘和履带合作的技术。它具有结构简单,稳定可靠,操作方便,成本低,便于大量生产等特点。对于以上特点,该机器可应用大量高楼玻璃的清洗工作,也可以再一层楼上用多个机器,这样可以大大的改善工作效率提高,具有一定的使用价值,可减少人工清洗的危险度,也大大地解放社会生产力,所以有一定的开发前景和经济市场。
擦玻璃清洗机的结构部分 擦玻璃清洗机的结构部分分二大类; 一机器本体; 二控制系统; 机器本体又分二大类; 一机器支架, 二运动动力系统。机器支架分为;擦玻璃机器手,中间体,机器脚。 2 擦玻璃机器手 对于整个擦玻璃清洗机,经过我们小组对几种擦玻璃机器手的对比加分析后,得出最优的方案,所以我们小组采用曹天真发明一种擦玻璃机械手,其特征在于它是由转盘擦头、手杆、轴承及双拉线所构成;所说的转盘擦头是一带一个直角的硬板及与之固定的擦拭软布构成,该转盘擦头的硬板面中心位置有一连接座,连接座处装有轴承,所说的手杆与轴承中的轴心相连接,手杆下端装有 呈平行板状的拉线支架,二拉线的各一端装在拉线 支架上呈可拉动状,另一端分别固定连接于转盘擦 头的直角下两端,转盘擦头依轴承、手杆及二拉线 呈180°可旋转状。 我们选择小组选择这种擦玻璃机器手的理由是:1.构造简单,使用方便、安全,可解决擦玻璃的各种情况;2.成本低。 在机器手的清洗端,我们采用市面上最新的去污方法,就是采用非接触式去污技术,采用这种技术的优点是,既无压力,又不加清洗剂,体现了简洁,环保的设计理念。
六自由度工业机器人设计
六自由度工业机器人 对于工业机器人的设计与大多数机械设计过程相同;首先要知道为什么要设计机器人机器人能实现哪些功能活动空间(有效工作范围)有多大了解基本的要求后,接下来的工作就好作了。 首先是根据基本要求确定机器人的种类,是行走的提升(举升)机械臂、还是三轴的坐标机器人、还是六轴的机器人等。选定了机器人的种类也就确定了控制方式,也就有了在有限的空间内进行设计的指导方向。 接下来的要做的就是设计任务的确定。这是一个相对复杂的过程,在实现这一复杂过程的第一步是将设计要求明确的规定下来;第二步是按照设计要求制作机械传动简图,分析简图,制定动作流程表(图),初步确定传动功率、控制流程和方式;第三步是明确设计内容,设计步骤、攻克点、设计计算书、草图绘制,材料、加工工艺、控制程序、电路图绘制;第四步是综合审核各方面的内容,确认生产。 下面我将以六轴工业机器人作为设计对象来阐明这一设计过程: 在介绍机器人设计之前我先说一下机器人的应用领域。机器人的应用领域可以说是非常广泛的,在自动化生产线上的就有很多例子,如垛码机器人、包装机器人、转线机器人;在焊接方面也有很例子,如汽车生产线上的焊接机器人等等;现在机器人的发展是非常的迅速,机器人的应用也在民用企业的各个行业得以延伸。机器人的设计人才需求也越来越大。 六轴机器人的应用范筹不同,设计形式也各不相同。现在世界上生产机器人的公司也很多,结构各有特色。在中国应用最多的如:ABB、Panasonic、FANUK、莫托曼等国外进口的机器人。 既然机器人的应用那么广泛,在我国却没有知名的生产公司。对于作为中国机械工程技术人员来说是一个值得思考的问题!有关机器人技术方面探讨太少了从业人员还不能成群体虽然在很多地方可以看到机器的论术,可是却没有真正形成普及的东西。 即然是要说设计,那我就从头一点一点的说起。力求讲的通俗简明一些,讲得不对的地方还请各位指正! 六轴机器人是多关节、多自由度的机器人,动作多,变化灵活;是一种柔性技术较高的工业机器人,应用面也最广泛。那么怎样去从头开始的设计它呢工作范围又怎样去确定动作怎样去编排呢位姿怎样去控制呢各部位的关节又是有怎么样的要求呢等等。。。。。。让我们带着众多的疑问慢慢的往下走吧! 首先我们设定:机器人是六轴多自由度的机器人,手爪夹持二氧气体保护焊标准焊枪;完成点焊、连续焊等不同要求的焊接部件,工艺要求、工艺路线变化快的自动生线上。最大伸长量:1700mm;转动270度;底座与地平线水平固定;全电机驱动。 好了,有了这样的基本要求我们就可以做初步的方案的思考了。 首先是全电机驱动的,那么我们在考虑方案的时候就不要去考虑液压和气压的各种结构了,也就是传动机构只能用齿轮齿条、连杆机构等机械机构了。 机器人是用于焊接方面的,那么我们就去考察有人工行为下的各种焊接手法和方法。这里就有一个很复杂的东西在里面,那就是焊接工艺;即然焊艺定不下来,我们就给它区分一下,在常用焊接里有单点点焊、连续断点点焊、连续平缝焊接、填角焊接、立缝焊接、仰焊、环缝焊等等。。。。。。 搞清了各种焊方法,也就明白了要实现这些复杂的动作就要有一套可行的控制方式才行;在机械没有完全设计出来之前可以不做太多的控制方案思考,有一个大概的轮廓概念就行了,待机械结构做完,各方面的驱动功率确定下来之后再做详细的程序。 焊枪是用常用的标准的焊枪,也就是说焊枪是随时可以更换下来的,也就要求我们要做到对焊枪的夹持部分进行快速锁定与松开。
常用材料对照表
NO GB 699 ГОСТASTM/AISI BS NF DIN JIS 108F 08КПUst14 SPH1208081008 040A04050A04 S9CK 310F 10КПUst13 SHP2410101010040A10045A10060A10C10,XC10 C10,CK10 S10C 515F 15КПSHP3 615 15 1015040A15050A15060A15C15,XC15C15,CK15 S15C S15CK 720201020040A20050A20060A20C20,XC18C22,CK22S20C 825251025060A25070M26C25,XC25C25,CK25S25C 930301030060A30C30,XC32C30,CK30S30C 1035351035060A35C35,XC35C35,CK35S35C 1140401040060A40C42,XC42C40,CK40S40C 1245451045060A42060A47C45,XC45C45,CK45S45C 13505010491050060A52C50,XC48C50,CK50S50C 1455551055060A57070M35C55,XC55C55,CK55S55C 1560601060060A62C60,XC60C60,CK60S58C 16656510641065060A67C65,XC65C67,CK6717707010691070060A72070A72C70,XC70C70,CK7018757510741075060A78070A78XC75C75,CK751980801080060A83XC80CK8020858510841085050A86060A86XC85CK852115Mn 15Г1016080A15080A17XC1214Mn415Mn32220Mn 20Г10191022080A20080A22XC18 19Mn520Mn521Mn42325Mn 25Г10251026 080A25080A2726Mn52430Mn 30Г 1033 080A30080M30XC3230Mn431Mn430Mn52535Mn 35Г1037080A35080M3635Mn435Mn52640Mn 40Г1039080A40080M4040M5 40Mn42745Mn 45Г1046080A47080M4646Mn5 2850Mn 50Г10531051080A52080M50XC48 50Mn552Mn52960Mn 60Г10621061080A57080A62CK603065Mn 65Г1566080A6765Mn4 3170Mn 70Г1572080A723220Mn220Г213201321150M1920M520Mn5SMn2133 30Mn2 30Г2 1330 150M28 32M5 30Mn5 SMn24 Metal materials commonly used brand of table ISO 683/1 C25,C25E4,C25M2C30,C30E4,C30M2C35,C35E4,C35M2C40,C40E4,C40M2C45,C45E4,C45M2C50,C50E4,C50M2C55,C55E4,C55M2C60,C60E4,C60M2
常用材料:园林中常用的铺地及构
常用材料:园林中常用的铺地及构筑物饰面材料 常用的铺地材料 1、花岗岩:为开采的坚硬天然石材 (1)常用规格为300*300,400*200、600*300,600*600;可使用的规格为100*100,200*200,原则上花岗岩可以定制或者现场切割成任何规格,但会造成成本的增加和人工的浪费,所以如无特殊铺装设计要求的情况下,不建议使用(做圆弧状铺装除外)。 ①当作为碎拼使用时,一般使用规格为边长300-500,设计者可以要求做成自然接缝,或者要求做成冰裂形式的直边接缝。 ②当作为汀步时,一般使用规格为600*300,800*400,或者为边长300-800的不规则花岗岩,厚度为50-60。 铺装方式:对缝、错缝、直铺、斜铺、席纹、向心(沿径环形) (2)厚度在一般情况下,人行路为30厚,车行路为50厚,在车行流量不大及不通行大型车辆的道路上也可使用30厚。 (3)常用颜色为白色、灰色、黄色、红色、绿色、黑色、青色、棕色; 白色——芝麻白、珍珠白、山东白麻 灰色——芝麻灰、鲁灰、章丘灰、珍珠灰; 黄色——黄锈石、虎皮黄、黄金麻、金钻麻、菊花黄; 红色——五莲红(浅色)、樱花红(浅色)、中国红(深色)、新疆红、绣板; 绿色——万年青、森林绿、菊花绿; 黑色——芝麻黑、中国黑、蒙古黑、福鼎黑、黑金沙; 棕色——英国棕;
(4)面层经过分为机切、自然面、抛光、烧毛、凿毛、荔枝面、机刨、剁斧等。 毛面20MM 光面20MM 荔枝面25MM 自然面30MM 蘑菇面50MM 剁斧面30MM 拉丝面大于等于25MM 斩假面30MM ; ①机切是指花岗岩经过机器切割后的面层质感,既不光滑也不粗糙。 ②自然面是指花岗岩经开采后所形成的自然形态,铺装时面层稍微经过加工,去除尖角,其他面为机切面,铺设完成后走在上面有明显的感觉。 ③抛光是指对经过机切后的花岗岩进行机器打磨后的面层质感,表面很光滑,在雨天和雪天会致使行人滑到,所以在设计时,此种花岗岩铺装面积及宽度都不宜过大。 ④烧毛是指对机切面的花岗岩高温处理,形成较规则的凹凸面层,此面层的颜色会比其它几种面层的颜色稍浅;黄色花岗岩经过烧毛处理后颜色会偏红。 ⑤凿毛是指对机切面的花岗岩开凿处理后形成较不规则的凹凸面层,粗糙程度大于烧毛,常用于黄色花岗岩的毛面处理。也可以对抛光的花岗岩进行凿毛处理。 ⑥荔枝面是指对机切面的花岗岩处理后形成不规则的凹凸面层,粗糙程度大于凿毛。 ⑦机刨是指对机切面的花岗岩进行机器的拉槽处理,若对抛光面的花岗岩拉槽处理,可以形成光面和机切面相间的质感。 (5)每块花岗岩铺装之间可以设计留缝宽度,一般图纸中不注明留缝宽度时,表示留缝宽度为3-5;设计者可以根据铺装效果要求特殊的留缝宽度,常用的宽度为6,或者密缝(留缝1,对施工工艺要求较高)。 (6)常用的铺装方式为错缝(分对中及不对中两种),齐缝,席纹,人字形,碎拼;机刨面花岗岩采用不同方向的铺装时,会产生表面纹路的变化。 2、水泥砖:为水泥和染色剂混合预制成。 (1)常用规格为200*100,400*200,也可以使用200*200,300*150,300*300。原则上水泥砖可以根据设计要求定制成任何规格。 (2)厚度一般为60厚,也有50厚。
工业机器人操作机的设计方法和步骤
工业机器人操作机的设计方法和步骤 (1)确定工作对象和工作任务开始设计操作机之前,首先要确定工作对象、工作任务。 1)焊接任务:如果工作对象是一辆汽车或是一个复杂曲面的物体,工作任务是对其进行弧焊或点焊,则要求机器人的制造精度很高,弧焊任务对机器人的轨迹精度和位姿精度及速度稳定性有很高的要求,点焊任务对机器人的位姿精度有很高的要求,两种任务都要求机器人具备摆弧的功能, 同时要能在狭小的空间内自由地运动,具备防碰撞功能,故机器人的自由度至少为六个。 2)喷漆任务:如果工作对象是一辆汽车或是一个复杂曲面的物体,工作任务是喷涂汽车的内部和车门或是复杂曲面物体的表面,则要求机器人手腕要灵活,能够在狭小的空间内自由地运动,具备防碰撞功能;要求机器人能够在长时间内连续稳定可靠地工作;同时要求机器人具备光滑的流线型外表面,漆、气管线最好能从其横臂和手腕内部通过,使机器人外表不易积漆积灰,不会污染已喷好的工作对象,且漆、气管线也不易损坏;因喷漆机器人是在易燃易爆的工作环境中工作,故要具备防爆的功能。同时对机器人的轨迹精度和位姿精度及速度稳定性也有较高的要求。机器人的自由度至少应为六个。 3)搬运任务:如果工作对象比较笨重,工作任务是定点搬运,定位精度要求高,则对机器人的承载能力和定位精度有高的要求。如果工作对象比较轻巧,工作任务也是定点搬运,但要求轻拿轻放,且定位精度要求高,则对机器人的速度稳定和定位精度有高的要求。 4)装配任务:对机器人的速度稳定密和位姿精度有很高的要求。 有些机器人能完成多种工作任务,如MOTOMAN - SKI20系列机器人,既可以用于搬运也可以用 于点焊,具有快速、精巧、强有力和安全性高的特点;另一种MOTOMAN—SK6/ SK16系列机器人, 可以完成弧焊、搬运、涂胶、喷釉和装配多种任务,具有高速、精巧和可靠性高的特点。 设计新型机器人时,要充分考虑以上诸多因素,并应多参考国内外同类产品的先进机型,参考其设计参数,经过反复研究和比较,确定出所要机械部分的特点,定出设计方案。下面以一台六自由度交流伺服通用机器人为例讲一下设计过程。 (2)确定设计要求 1 )负载:根据用户工作对象和工作任务的要求,参考国内外同类产品的先进机型,确定机器人 的负载。一般喷漆和弧焊机器人的负载为5?6kg。 2 )精度:根据用户工作对象和工作任务的要求,参考国内外同类产品的先进机型,确定机器人未端的最大复合速度和机器人各单轴的最大角速度。 3 )精度:根据用户工作对象和工作任务的要求,参考国内外同类产品的先进机型,确定机器人 的重复定位精度、如弧焊机器人的重复定位精度为土0.4mm ABB公司开发的Model 5003型喷漆机器人的重复定位精度为土1mm同时要确定构成机器人的零件的精度、臂体的尺寸精度、形位精度和传动链的间隙,如齿轮的精度和传动间隙;还要确定机器人上所用的元器件的精度,如减速器的传动精度、轴承的精度等等。
工业机器人培养方案
工业机器人技术专业人才培养方案(2016级、三年制) 专业名称:工业机器人技术 专业代码: 招生对象:普通高中毕业生及同等学历者 学制与学历:三年制大专
一、制订人才培养方案的依据 为了适应社会经济建设的高速发展,满足社会对工业机器人技术应用高技能人才的需求,进一步推动高等职业教育体制改革,根据《国家中长期教育改革和发展规划纲要(2010-2020年)》、《国民经济和社会发展第十三个五年规划》、《机械工业十三五规划》、《教育部关于加强高职高专教育人才培养工作的意见》(教高[2000]2号)、《教育部关于以就业为导向深化高等职业教育改革的意见》(教高[2004]1号)与《关于全面提高高等职业教育教学质量的若干建议》(教高[2006]16号)、《教育部财政部关于支持高等职业学校提升专业服务产业发展能力的通知》(教职成[2011]11号)、《中国制造2025》及教育部关于发展高等职业教育相关文件精神,结合我公司实际情况,加强工业机器人技术专业的建设,制定了本专业人才培养方案。 二、培养目标与规格 培养目标:本专业培养拥护党的基本路线,德、智、体、美等全面发展,具有良好的科学文化素养、职业道德和扎实的文化基础知识。具有获取新知识、新技能的意识和能力,能适应不断变化的工作需求。熟悉企业生产流程,具有安全生产意识,严格按照行业安全工作规程进行操作,遵守各项工艺流程,重视环境保护,并具有独立解决非常规问题的基本能力。掌握现代工业机器人安装、调试、维护方面的专业知识和操作技能,具备机械结构设计、电气控制、传感技术、智能控制等专业技能,能从事工业机器人系统的模拟、编程、调试、操作、销售及工业机器人应用系统维护维修与管理、生产管理及服务于生产第一线工作的高素质高技能型人才。 (一)专业知识 1.具有常用电子元器件、集成器件、单片机的应用知识; 2.具有传感器应用的基本知识; 3.具有应用机械传动、液压与气动系统的基础知识; 4.具有PLC、变频器、触摸屏、组态软件控制技术的应用知识; 5.具有交流调速技术的应用知识; 6.具有机械系统绘图与设计的知识; 7.具有计算机接口、工业控制网络和自动化生产线系统的基础知识; 8.具有工业机器人原理、操作、编程与调试的知识; 9.具有检修工业机器人系统、自动化生产线系统故障的相关知识; 10.具有安全用电及救护常识。 (二)职业能力 1.读懂机器人应用系统的结构安装图和电气原理图的能力; 2.测绘简单机械部件生成零件图和装配图,跟进非标零件加工,完成装配工作的能力;
常用法兰规格尺寸表
GB9119,2—88 GB9119,2—88 in 公称 通径 10kg= 公称 通径 16kg= 法兰 外径 螺 栓 孔 距 螺 栓 直 径 螺栓 孔数 法兰 厚度 法 兰 外 径 螺栓 孔距 螺栓 直径 螺 栓 孔 数 法兰厚度 3/ 8 DN10506014414DN10906014414㎡㎏1/ 2 DN155********DN159******** 3/ 4 DN201057514416DN201057514416 1DN251158514416DN251158514416 11/ 4 DN3214010018418DN3214010018418 11/ 2 DN4015011018418DN4015011018418 2DN5016512518420DN5016512518420
21/ 2 DN6518514518420DN6518514518420 3DN8020016018820DN8020016018820 31/ 2DN10 22018018822 DN10 22018018822 4 DN12 525021018822 DN12 5 25021018822 5 DN15 028********* DN15 28524022824 6 DN20 034029522824 DN20 34029522826 8 DN25 0395350221226 DN25 405355261229 10 DN30 0445400221228 DN30 460410261232 12 DN35 0505460221630 DN35 520470261635 14 DN40 0565515261632 DN40 580525301638
擦窗机器人
擦窗机器人 擦窗机器人,又称自动擦窗机、擦玻璃机器人、智能擦窗器、智能窗户清洁器等,是智能家用电器的一种。它能凭借自身底部的真空泵或者风机装置,牢牢地吸附在玻璃上,然后借助一定的人工智能,自动探测窗户的边角距离、规划擦窗路径。擦窗机器人一般会利用自身吸附在玻璃上的力度来带动机身底部的抹布擦掉玻璃上的脏污。 擦窗机器人的出现,主要是为了帮助人们解决高层擦窗、室外擦窗难的问题。 中文名擦窗机器人适用环境:家具空间,玻璃 外文名The Window Cleaning Robot 使用寿命:5~8年 目录 1、概述 2、原理 3、构造 4、分类 5、注意事项
1 概述 擦窗机器人是需带电工作的电器,以方形构造为主,方便清理玻璃的边角区域。工作的时候需要连接电源线工作,虽然内部有电池,但其电量仅在突发情况下做备用。擦窗机器人界面设计的比较简单,多为一键式控制面板外加单手操作设计,另配有遥控,其遥控信号可以穿透玻璃不受阻碍。擦窗机器人在底部配有清洁布,当它吸附在玻璃上行走时,带动清洁布擦过玻璃,从而达到清洁窗户的目的。 擦窗机器人是一个全新的品类,目前市场上品牌不多,最先研发出这个产品的是科沃斯机器人,大概时间在2011年,从官网上看,目前有七八个产品,价格高低不同,品类比较齐全。近两年市场上也有一些跟进者,但是都没做起来。 2 原理 启动后,擦窗机器人通过机身底部的真空吸盘或者风机在机身和玻璃之间产生真空部分,从而牢牢地吸附在玻璃上。通过一定的人工智能技术,它能够自动探测玻璃的上下边框,明确清洁范围,自动执行规划清洁(从左至右,或从下至上的擦拭顺序),并在清洁完毕之后回到初始的放置位置方便人们将其取下。 擦窗机器人底部的可拆装抹布,会在行走的过程中擦拭掉玻璃上的脏污,从而达到清洁的目的。 3构造 ●本体:以方形为主,方便清理窗户边角位置; ●电源适配器:擦窗机器人需要在链接电源线的情况下工作,虽然内部有充电电池,但仅作为突发状况(比如停电等)下的备用电量使用;
工业机器人设计方案
工业机器人设计方案 工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。在现代工业中,生产过程中的自动化已成为突出的主题。各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作。工业机器人机械手是工业自动控制领域中经常遇到的一种控制对象。工业机器人机械手可以完成许多工作,如搬物、装配、切割、喷染等等,应用非常广泛。 目录 1.工业机器人特点有以下几个 2. 工业机器组成结构及工作原理 3.工业机器人有哪些 1.工业机器人特点有以下几个
(1)可编程。生产自动化的进一步发展是柔性启动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。(2)拟人化。工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有电脑。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语言功能等。传感器提高了工业机器人对周围环境的自适应能力。(3)通用性。除了专门设计的专用的工业机器人外,一般工业机器人在执行不同的作业任务时具有较好的通用性。比如,更换工业机器人手部末端操作器(手爪、工具等)便可执行不同的作业任务。(4)工业机器技术涉及的学科相当广泛,归纳起来是机械学和微电子学的结合-机电一体化技术。第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是计算机技术的应用密切相关。因此,机器人技术的发展必将带动其他技术的发展,机器人技术的发展和应用水平也可以验证一个国家科学技术和工业技术的发展水平。
常用金属材料介绍及规格表
一、0方通规格2 方管规格壁厚规格壁厚 15×15 0.8-1.2 50×50 1.2-4.0 16×16 0.6-1.5 60×60 1.5-4.0 18×18 0.6-1.8 70×70 1.5-4.0 20×20 0.6-1.8 80×80 1.7-4.0 25×25 0.8-2.5 90×90 1.7-4.0 30×30 0.8-2.75 100×100 1.5-4.0 40×40 1.0-4.0 0 0 方管最大可做到400*400壁厚12毫米 矩形管规格壁厚规格壁厚20×10 0.8-2.5 50×40 1.5-4.0 30×20 0.8-2.5 50×70 1.5-4.0 40×20 0.8-2.75 60×30 1.5-4.0 40×25 1.2-3.0 60×80 1.5-4.0 40×30 1.5-3.75 60×90 1.5-4.0 40×60 1.5-4.0 80×100 1.5-4.0 40×80 1.0-4.0 100×40 1.5-4.0 50×25 1.0-4.0 100×50 1.5-4.0 50×30 1.0-4.0 120×50 1.5-4.0 矩形管最大到400*300壁厚12毫米 工字钢规格重量表 2008年06月23日星期一11:39
五、工字钢单位重量表热轧普通工字钢每米重量表
热轧轻型工字钢每米重量表 二、角铁规格型号大全 规格型号材质规格型号材质 25*25*3 Q235B 90*90*7 Q235B 30*30*3 Q235B 90*90*8 Q235B 30*30*4 Q235B 90*90*9 Q235B 38-*38*3 Q235B 90*90*10 Q235B 38*38*4 Q235B 100*100*8 Q235B 40*40*3 Q235B 100*100*9 Q235B 40*40*4 Q235B 100*100*10 Q235B 40*40*5 Q235B 100*100*12 Q235B 50*50*4 Q235B 125*125*8 Q235B 50*50*5 Q235B 125*125*10 Q235B
工业机器人项目策划方案
工业机器人项目 策划方案 规划设计/投资分析/实施方案
报告说明— 该工业机器人项目计划总投资13803.45万元,其中:固定资产投资10313.62万元,占项目总投资的74.72%;流动资金3489.83万元,占项目总投资的25.28%。 达产年营业收入27190.00万元,总成本费用21059.78万元,税金及附加242.82万元,利润总额6130.22万元,利税总额7218.59万元,税后净利润4597.66万元,达产年纳税总额2620.93万元;达产年投资利润率44.41%,投资利税率52.30%,投资回报率33.31%,全部投资回收期4.50年,提供就业职位424个。 工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。
目录 第一章项目总论 第二章承办单位概况 第三章背景及必要性 第四章建设规划 第五章项目选址 第六章项目工程设计说明第七章工艺可行性 第八章项目环保研究 第九章企业卫生 第十章建设风险评估分析第十一章节能说明 第十二章项目进度计划 第十三章投资方案计划 第十四章项目经营效益分析第十五章总结说明 第十六章项目招投标方案
第一章项目总论 一、项目提出的理由 工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业 加工制造功能。 二、项目概况 (一)项目名称 工业机器人项目 (二)项目选址 某某产业示范中心 所选场址应避开自然保护区、风景名胜区、生活饮用水源地和其他特 别需要保护的环境敏感性目标。项目建设区域地理条件较好,基础设施等 配套较为完善,并且具有足够的发展潜力。项目建设区域以城市总体规划 为依据,布局相对独立,便于集中开展科研、生产经营和管理活动,并且 统筹考虑用地与城市发展的关系,与项目建设地的建成区有较方便的联系。对各种设施用地进行统筹安排,提高土地综合利用效率,同时,采用先进 的工艺技术和设备,达到“节约能源、节约土地资源”的目的。 (三)项目用地规模
工业机器人设计与实现毕业设计
工业机器人毕业设计 目录 摘要 1绪论 (1) 1.1 工业机器人研究的目的和意义 (1) 1.2 工业机器人在国内外的发展现状与趋势…………………….. 1.3 工业机器人的分类 1.4 本课题研究的主要内容 2 总体方案的确定 2.1 结构设计概述 2.2 基本设计参数 2.3 工作空间的分析 2.4 驱动方式 2.5 传动方式确定 3 搬运机器人的结构设计 3.1 驱动和传动系统的总体结构设计 3.2 手爪驱动气缸设计计算 3.3 进给丝杠的设计计算 3.4 驱动电机的选型计算 3.5 手臂强度校核
4 搬运机器人的控制系统 4.1 机器人控制系统分类 4.2 控制系统方案分析 4.3 机器人的控制系统方案确定 4.4 PLC及运动控制单元选型 5 结论与展望 致谢
1 绪论 1.1 工业机器人研究的目的和意义 工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。自从1962年美国研制出世界上第一台工业机器人以来,机器人技术及其产品发展很快,已成为柔性制造系统 (FMS)、自动化工厂(FA)、计算机集成制 造系统(CIMS)的自动化工具。广泛采用 工业机器人、不仅提高产品的质量与数量而且 也保障人身安全、改善劳动环境、减轻劳动强 度、提高劳动生产率、节约材料消耗以及降低 生产成本有着十分重要的意义。与计算机、网 络技术一样,工业机器人的广泛应用正在日益 改变着人类的生产和生活方式。 20世纪80年代以来,工业机器人技术逐渐成熟、并很快得到推广,目前已经在工业生产的许多领域得到应用。在工业机器人逐渐得到推广和普及工程中,下面三个方面的技术进步起着非常重要的作用。 1驱动方式的改变 20世纪70年代后期,日本安川电动机公司研制出了第一台全自动的工业机器人而此前的工业机器人基本上采用液压驱动方式。但与采用液压驱动的机器人相比,采用伺服电动机驱动机器人在响应速度、精度、灵活性等方面都有很大的提高。因此它逐步代替了采用液压驱动的机器人成为工业机器人驱动方式的主流。在此过程中,谐波减速器、RV减速器等高性能减速机构的发展也功不可没。近年来,交流伺服驱动已经逐渐代替传统的直流伺服驱动方式,直线电动机等新型驱动方式在许多应用领域也有了长足发展。 2信息处理速度的提高 机器人的动作通常是通过机器人的各个环节的驱动电动机的运动而实现的。为了是机器人完成各种复杂动作,机器人控制器需要进行大量计算并在此基础上向机器人的各个环节的驱动电动机发出必要的控制指令。随着信息技术的不断发展,CPU的计算能力有了很大的提高,机器人控制器的性能也有了很大提高,高性能机器人控制器甚至可以同时控制20多个关节。机器人控制性能的提高,也进一步促进了工业机器人本身性能的提高并扩大了工业机器人的应用范围。近年来,随着信息技术和网络技术的发展已经出现了多台机器人通过网络共享信息并在此基础上进行协调控制的技术趋势。 1.2 工业机器人在国内外的发展现状与趋势 目前,工业机器人有很大一部分应用于制造业的物流搬运中,极大的促进物流自动化,随着生产的发展,搬运机器人的各方面的性能都得到了很大的改善和提高。气动机械手大量应用到物流搬运机器人领域。在手爪的机械结构方面根据
工业机器人应用与维修专业课程标准与方案
工业机器人应用与维修专业课程标准与方案 一、招生对象及学制 1.招生对象: 普通高中生、中等职业学校毕业生。 2.学制:三年 二、专业培养目标 本专业培养拥护党的基本路线,德、智、体、美等全面发展,具有良好的科学文化素养、职业道德和扎实的文化基础知识。具有获取新知识、新技能的意识和能力,能适应不断变化的工作需求。熟悉企业生产流程,具有安全生产意识,严格按照行业安全工作规程进行操作,遵守各项工艺流程,重视环境保护,并具有独立解决非常规问题的基本能力。掌握现代工业机器人安装、调试、维护方面的专业知识和操作技能,具备机械结构设计、电气控制、传感技术、智能控制等专业技能,能从事工业机器人系统的模拟、编程、调试、操作、销售及工业机器人应用系统维护维修与管理、生产管理及服务于生产第一线工作的高素质高技能型人才。 三、工业机器人技术专业人才培养需求分析 1.工业机器人技术专业人才的社会需求分析 (1)工业机器人技术发展现状 a.工业机器人正向全球范围内普及 生产力在不断进步,推动着科技的进步与革新。自工业革命以来,人力劳动已经逐渐被机械所取代,工业机器人的出现是人类在利用机械进行社会生产史上的一个里程碑。全球诸多国家近半个世纪的工业机器人的使用实践表明,工业机器人的普及是实现自动化生产,提高社会生产效率,推动企业和社会生产力发展的有效手段。随着工业机器人向更深更广方向的发展以及机器人智能化水平的提高,机器人的应用范周还在不断地扩大,已从汽车制造业推广到其他制造业,进而推广到诸如采矿机器人、建筑业机器人以及水电系统维护维修机器人等各种非制造行业。此外,在国防军事、医疗卫生、生活服务等领域机器人的应用也越来越多,如无人侦察机(飞行器)、警备机器人、医疗机器人、家政服务机器人等均有应用实例。机器人正在为提高人类的生活质量发挥着重要的作用。 “工业4.0”两大主题,“智慧工厂”重点研究智能化生产系统及过程,以及网络化分布式生产设施的实现;“智能生产”主要涉及整个企业的生产物流管理、人机互动以及3D技术在工业生产过程中的应用等。工业机器人属于上述信息物理融合系统(CPS)或"物理计算"理念或课题(Physical Computing)。据统计,目前全世界大约有100万机器人在世界各个角落辛勤工作,特别是在人类难以胜任的危险环境里。日本是机器人密度最高的国家,每10万人中就有295个机器人。目前,全球工业机器人装机总量已达到100多万台,主要分布在日本、美国、德国等发达国家。机器人新增的需求主要来自中国等新兴市场,日本等发达国家的保有量较为平稳。 在我国,工业机器人的最初规模应用是在汽车和工程机械行业,主要用于汽车及工程机械的喷涂及焊接。工业机器人主要以点焊、弧焊、装配和搬运机器人为主,我国的工业机器人市场已经开始形成,特别是加入WTO以后,对各种以工业机器人为主的先进自动化装备的需求日益迫切。我国现有的机器人研究开发和应用的工程单位超过200家,其中从事工业机器人研究和应用的超过80家。基本掌握了操作机的设计制造技术、控制系统硬件和软件设计技术、运动学和轨迹规划技术,开发出弧焊、点焊、装配、搬运等机器人,目前生产的各类工业机器人中有90%以上用于生产中。 b.中国将成为全球最大的机器人市场 近年来,中国已成为工业机器人增长最快的国家之一。2004年以来,国内机器人市场年均增长率达到40%以上。2011年,我国工业机器人市场增长率更是高达51%,位居全球第一。23000台的绝对增量也仅次于日韩,排在全球第三位。中国工业机器人几年内或将迎来井喷式发展,而非简单的线性增长。这种井喷式增长,与我国人口和经济现状密切相关。过去我们曾依靠低廉而充沛的人力资源,将中国发展为世界最大制造业大国。但随着用工成本的增长,“人才红利”取代“人口红利”,
铝板规格型号及工业常用铝板规格表
铝板规格型号及工业常用铝板规格表 一.铝板规格型号 一. 铝板: 1、纯铝板:材质:1050/1060/1070/1100/ 1200/厚度:0.1---20mm 宽度:800---2200mm 2、合金铝板:材质:2A21/3003/5052/5083/6061/6082 /8011厚度:0.5---260mm宽度:800---2800mm 3、幕墙开平铝板:材质:1060/1100 厚度0.95、1.35、1.85、 2.35、2.7、2.85mm宽度0.8---1.5m 二.铝卷: 材质:1060/1100/8011/3003/3004/5052 厚度:0.1---10mm宽度:600---2000mm 1、防腐防锈保温专用铝卷材质:1060/3003 厚度:0.3---3.0mm 宽度:600---2000mm 2、电厂专用铝卷材质:1060/3003 厚度:0.5、0.6、0.75、0.8mm 宽度:600---1200mm 3、彩涂铝卷/压花铝卷材质:1100/1060 /3003厚度: 0.02---1.2mm宽度:600-1370mm 三.铝箔: 1、家用箔/餐具箔材质:8011--0态厚度:0.009---0.08mm 2、食品软包装箔材质:8011/1235/1060 厚度:0.009---0.23mm 3、空调箔(亲水箔)材质:8011/3003/1100 厚度:0.07---0.25mm
四.铝槽/角铝(交通标牌): 材质:6063,壁厚:0.8mm---4mm,底槽宽度:5cm、6cm、7cm、8cm、10cm长度:3---8米/支 五.花纹铝板(防滑铝板): 1、厚度:0.8-12mm,宽度:1000---1900mm,材质:1060/5052/5754 2、花纹类型:大五条筋、小五条筋、三条筋、指针型、菱形、桔皮纹 六.铝圆片: 1、材质:1060/3003/5052,冷轧料、热轧料,状态:硬态、软态、可拉伸状态 2、厚度:0.4---10mm,直径:Φ100---1250mm均可加工 3、铝三角牌:△边长60cm,边长70cm,边长90cm均可加工 七.铝带: 1.变压器专用铝带材质:1060--O态厚度:0.08---3.0mm 2..铝塑复合管用铝带材质:8011--O态厚度::0.12---0.3mm 3.电缆包覆用铝箔带材质:8011--O态或1060--O态厚度: 0.12---0.27mm 八.压花铝板(卷): 1、材质:1060/3003 厚度:0.08---2.0mm 宽度:100---1370mm 2、压花花型:经典橘皮纹、虫纹、水滴纹、菱形纹、锤纹、豆纹、钻石纹、鹅卵石纹、水波纹、贝雕 二. 工业常用铝板规格表
工业机器人设计说明书
目录 1. 设计背景 (2) 2. 设计思路 (3) 3. 设计方案 (7) 4. 循环动作 (8) 5. 设计心得体会 (9) 6. 参考文献 (10) 1. 设计背景 随着社会的进步和科技的发展, 机器人产品开始进入到生产过程和日常生活中, 各种类型的机器人在特定的工作环境下发挥着越来越重要的作用。但是目前对于移动式机器人多采用轮式移动机构, 在适应复杂地形时无法满足路况的要求, 由此设计一种灵活的、行走平稳和对路况适应性强的机器人成为解决此类问题的关键。 (1)为了对工业生产进一步了解,了解机器人工作原理 (2)由于组装复杂要求实践性更强,这样提高学生动手能力在传统实验里,主要是课程中的具体原理或理论的验证性实验,如机械原理中齿轮范成实验,主要是为了验证齿轮的加工原理;再如机械设计中的带传动实验主要是为了验证带传动中的两个重要的现象——弹性滑动和打滑。这些传统型实验对学生更好的理解课本的理论知识有很大的帮助,具有课本结合性强的特点。
(3)安装过程中应用知识面更广,培养综合素质实验的内容涉及面极广,不仅包括传统机械相关的实验内容,而且还涉及到了电动机、自动控制、软件编程(慧鱼公司自带的编辑软件)等多学科的知识,最重要是它能够把这些很好地知识结合起来,并体现到某个模型中。 (4)组建灵活性大,可以自行设计装配创新性高,增加学生研究性思维而在慧鱼实验中,学生不仅可以对教具所提供的样本模型进行验证式实验(通过这些模型实验可以使学生掌握机械、电子和自动化等的相关知识),而且可以把这些不同模型的特点结合起来,进行自主设计,设计出新的作品来,因此慧鱼实验具有较高的创新性。 2. 设计思路 该机器人的工作空间形式主要有四个自由度的运动和机械手的 夹松运动。 1.机械手的夹紧运动(如下图所示) 机械手结构简图