机器学习MLib+Spark
1、机器学习概念
1.1机器学习的定义
在维基百科上对机器学习提出以下几种定义:
●“机器学习是一门人工智能的科学,该领域的主要研究对象是人工智能,特别
是如何在经验学习中改善具体算法的性能”。
●“机器学习是对能通过经验自动改进的计算机算法的研究”。
●“机器学习是用数据或以往的经验,以此优化计算机程序的性能标准。”一
种经常引用的英文定义是:A computer program is said to learn from
experience E with respect to some class of tasks T and performance measure P, if its performance at tasks in T, as measured by P,
improves with experience E。
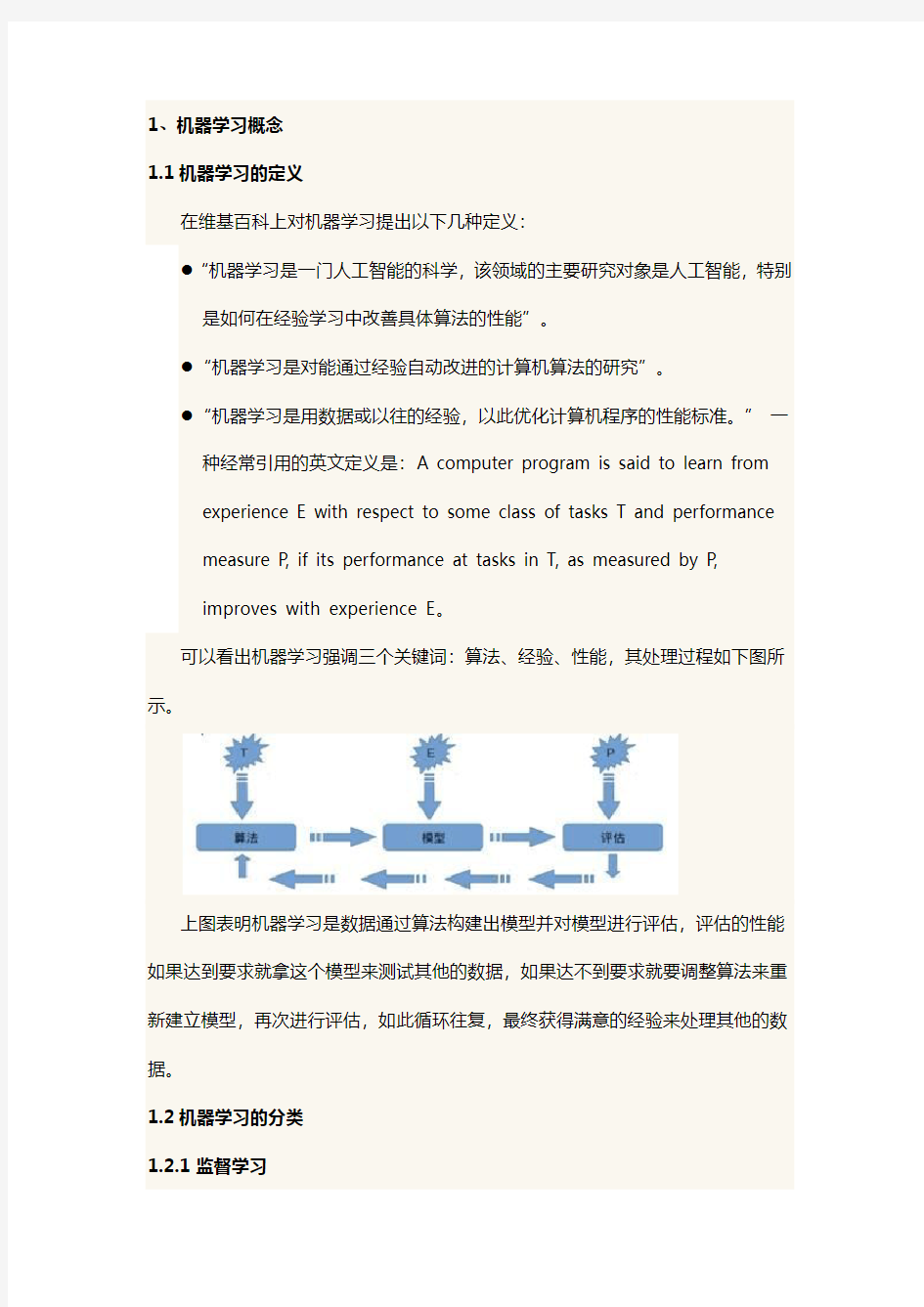
可以看出机器学习强调三个关键词:算法、经验、性能,其处理过程如下图所示。
上图表明机器学习是数据通过算法构建出模型并对模型进行评估,评估的性能如果达到要求就拿这个模型来测试其他的数据,如果达不到要求就要调整算法来重新建立模型,再次进行评估,如此循环往复,最终获得满意的经验来处理其他的数据。
1.2机器学习的分类
1.2.1 监督学习
监督是从给定的训练数据集中学习一个函数(模型),当新的数据到来时,可以根据这个函数(模型)预测结果。监督学习的训练集要求包括输入和输出,也可以说是特征和目标。训练集中的目标是由人标注(标量)的。在监督式学习下,输入数据被称为“训练数据”,每组训练数据有一个明确的标识或结果,如对防垃圾邮件系统中“垃圾邮件”、“非垃圾邮件”,对手写数字识别中的“1”、“2”、“3”等。在建立预测模型时,监督式学习建立一个学习过程,将预测结果与“训练数据”的实际结果进行比较,不断调整预测模型,直到模型的预测结果达到一个预期的准确率。常见的监督学习算法包括回归分析和统计分类:
●二元分类是机器学习要解决的基本问题,将测试数据分成两个类,如垃圾邮
件的判别、房贷是否允许等问题的判断。
●多元分类是二元分类的逻辑延伸。例如,在因特网的流分类的情况下,根据
问题的分类,网页可以被归类为体育、新闻、技术等,依此类推。
监督学习常常用于分类,因为目标往往是让计算机去学习我们已经创建好的分类系统。数字识别再一次成为分类学习的常见样本。一般来说,对于那些有用的分类系统和容易判断的分类系统,分类学习都适用。
监督学习是训练神经网络和决策树的最常见技术。神经网络和决策树技术高度依赖于事先确定的分类系统给出的信息。对于神经网络来说,分类系统用于判断网络的错误,然后调整网络去适应它;对于决策树,分类系统用来判断哪些属性提供了最多的信息,如此一来可以用它解决分类系统的问题。
1.2.2 无监督学习
与监督学习相比,无监督学习的训练集没有人为标注的结果。在非监督式学习中,数据并不被特别标识,学习模型是为了推断出数据的一些内在结构。常见的应用场景包括关联规则的学习以及聚类等。常见算法包括Apriori算法和k-Means算法。这类学习类型的目标不是让效用函数最大化,而是找到训练数据中的近似点。聚类常常能发现那些与假设匹配的相当好的直观分类,例如基于人口统计的聚合个体可能会在一个群体中形成一个富有的聚合,以及其他的贫穷的聚合。
非监督学习看起来非常困难:目标是我们不告诉计算机怎么做,而是让它(计算机)自己去学习怎样做一些事情。非监督学习一般有两种思路:第一种思路是在指导Agent时不为其指定明确的分类,而是在成功时采用某种形式的激励制度。需要注意的是,这类训练通常会置于决策问题的框架里,因为它的目标不是产生一个
分类系统,而是做出最大回报的决定。这种思路很好地概括了现实世界,Agent可以对那些正确的行为做出激励,并对其他的行为进行处罚。
因为无监督学习假定没有事先分类的样本,这在一些情况下会非常强大,例如,我们的分类方法可能并非最佳选择。在这方面一个突出的例子是Backgammon(西洋双陆棋)游戏,有一系列计算机程序(例如neuro-gammon和TD-gammon)通过非监督学习自己一遍又一遍地玩这个游戏,变得比最强的人类棋手还要出色。这些程序发现的一些原则甚至令双陆棋专家都感到惊讶,并且它们比那些使用预分类样本训练的双陆棋程序工作得更出色。
1.2.3 半监督学习
半监督学习(Semi-supervised Learning)是介于监督学习与无监督学习之间一种机器学习方式,是模式识别和机器学习领域研究的重点问题。它主要考虑如何利用少量的标注样本和大量的未标注样本进行训练和分类的问题。半监督学习对于减少标注代价,提高学习机器性能具有非常重大的实际意义。主要算法有五类:基于概率的算法;在现有监督算法基础上进行修改的方法;直接依赖于聚类假设的方法等,在此学习方式下,输入数据部分被标识,部分没有被标识,这种学习模型可以用来进行预测,但是模型首先需要学习数据的内在结构以便合理地组织数据来进行预测。应用场景包括分类和回归,算法包括一些对常用监督式学习算法的延伸,这些算法首先试图对未标识数据进行建模,在此基础上再对标识的数据进行预测,如图论推理算法(Graph Inference)或者拉普拉斯支持向量机(Laplacian SVM)等。
半监督学习分类算法提出的时间比较短,还有许多方面没有更深入的研究。半监督学习从诞生以来,主要用于处理人工合成数据,无噪声干扰的样本数据是当前
机器人的动力学控制
机器人的动力学控制 The dynamics of robot control 自123班 庞悦 3120411054
机器人的动力学控制 摘要:机器人动力学是对机器人机构的力和运动之间关系与平衡进行研究的学科。机器人动力学是复杂的动力学系统,对处理物体的动态响应取决于机器人动力学模型和控制算法。机器人动力学主要研究动力学正问题和动力学逆问题两个方面,需要采用严密的系统方法来分析机器人动力学特性。本文使用MATLAB 来对两关节机器人模型进行仿真,进而对两关节机器人进行轨迹规划,来举例说明独立PD 控制在机器人动力学控制中的重要作用。 Abstract: for the robot dynamics is to study the relation between the force and movement and balance of the subject.Robot dynamics is a complex dynamic system, on the dynamic response of the processing object depending on the robot dynamics model and control algorithm.Kinetics of robot research dynamics problem and inverse problem of two aspects, the need to adopt strict system method for the analysis of robot dynamics.This article USES MATLAB to simulate two joints, the robot, in turn, the two joints, the robot trajectory planning, to illustrate the independent PD control plays an important part in robot dynamic control. 一 动力学概念 机器人的动力学主要是研究动力学正问题和动力学逆问题两个方面,再进一步研究机器人的关节力矩,使机器人的机械臂运动到指定位臵,其控制算法一共有三种:独立PD 控制,前馈控制和计算力矩控制,本文主要介绍独立PD 控制。 动力学方程:)()(),()(q G q F q q q C q q M +++=? ????τ
支持向量机算法
支持向量机算法 [摘要] 本文介绍统计学习理论中最年轻的分支——支持向量机的算法,主要有:以SVM-light为代表的块算法、分解算法和在线训练法,比较了各自的优缺点,并介绍了其它几种算法及多类分类算法。 [关键词] 块算法分解算法在线训练法 Colin Campbell对SVM的训练算法作了一个综述,主要介绍了以SVM为代表的分解算法、Platt的SMO和Kerrthi的近邻算法,但没有详细介绍各算法的特点,并且没有包括算法的最新进展。以下对各种算法的特点进行详细介绍,并介绍几种新的SVM算法,如张学工的CSVM,Scholkopf的v-SVM分类器,J. A. K. Suykens 提出的最小二乘法支持向量机LSSVM,Mint-H suan Yang提出的训练支持向量机的几何方法,SOR以及多类时的SVM算法。 块算法最早是由Boser等人提出来的,它的出发点是:删除矩阵中对应于Lagrange乘数为零的行和列不会对最终结果产生影响。对于给定的训练样本集,如果其中的支持向量是已知的,寻优算法就可以排除非支持向量,只需对支持向量计算权值(即Lagrange乘数)即可。但是,在训练过程结束以前支持向量是未知的,因此,块算法的目标就是通过某种迭代逐步排除非支持向时。具体的做法是,在算法的每一步中块算法解决一个包含下列样本的二次规划子问题:即上一步中剩下的具有非零Lagrange乘数的样本,以及M个不满足Kohn-Tucker条件的最差的样本;如果在某一步中,不满足Kohn-Tucker条件的样本数不足M 个,则这些样本全部加入到新的二次规划问题中。每个二次规划子问题都采用上一个二次规划子问题的结果作为初始值。在最后一步时,所有非零Lagrange乘数都被找到,因此,最后一步解决了初始的大型二次规划问题。块算法将矩阵的规模从训练样本数的平方减少到具有非零Lagrange乘数的样本数的平方,大减少了训练过程对存储的要求,对于一般的问题这种算法可以满足对训练速度的要求。对于训练样本数很大或支持向量数很大的问题,块算法仍然无法将矩阵放入内存中。 Osuna针对SVM训练速度慢及时间空间复杂度大的问题,提出了分解算法,并将之应用于人脸检测中,主要思想是将训练样本分为工作集B的非工作集N,B中的样本数为q个,q远小于总样本个数,每次只针对工作集B中的q个样本训练,而固定N中的训练样本,算法的要点有三:1)应用有约束条件下二次规划极值点存大的最优条件KTT条件,推出本问题的约束条件,这也是终止条件。2)工作集中训练样本的选择算法,应能保证分解算法能快速收敛,且计算费用最少。3)分解算法收敛的理论证明,Osuna等证明了一个定理:如果存在不满足Kohn-Tucker条件的样本,那么在把它加入到上一个子问题的集合中后,重新优化这个子问题,则可行点(Feasible Point)依然满足约束条件,且性能严格地改进。因此,如果每一步至少加入一个不满足Kohn-Tucker条件的样本,一系列铁二次子问题可保证最后单调收敛。Chang,C.-C.证明Osuna的证明不严密,并详尽地分析了分解算法的收敛过程及速度,该算法的关键在于选择一种最优的工
数学建模方法及其应用
一、层次分析法 层次分析法[1] (analytic hierarchy process,AHP)是美国著名的运筹学家T.L.Saaty教授于20世纪70年代初首先提出的一种定性与定量分析相结合的多准则决策方法[2,3,4].该方法是社会、经济系统决策的有效工具,目前在工程计划、资源分配、方案排序、政策制定、冲突问题、性能评价等方面都有广泛的应用. (一) 层次分析法的基本原理 层次分析法的核心问题是排序,包括递阶层次结构原理、测度原理和排序原理[5].下面分别予以介绍.1.递阶层次结构原理 一个复杂的结构问题可以分解为它的组成部分或因素,即目标、准则、方案等.每一个因素称为元素.按照属性的不同把这些元素分组形成互不相交的层次,上一层的元素对相邻的下一层的全部或部分元素起支配作用,形成按层次自上而下的逐层支配关系.具有这种性质的层次称为递阶层次. 2.测度原理 决策就是要从一组已知的方案中选择理想方案,而理想方案一般是在一定的准则下通过使效用函数极大化而产生的.然而对于社会、经济系统的决策模型来说,常常难以定量测度.因此,层次分析法的核心是决策模型中各因素的测度化.
3. 排序原理 层次分析法的排序问题,实质上是一组元素两两比较其重要性,计算元素相对重要性的测度问题. (二) 层次分析法的基本步骤 层次分析法的基本思路与人对一个复杂的决策问题的思维、判断过程大体上是一致的[1]. 1. 成对比较矩阵和权向量 为了能够尽可能地减少性质不同的诸因素相互比较的困难,提高结果的准确度.T .L .Saaty 等人的作法,一是不把所有因素放在一起比较,而是两两相互对比,二是对比时采用相对尺度. 假设要比较某一层n 个因素n C C ,,1 对上层一个因素O 的影响,每次取两个因素i C 和j C ,用ij a 表示i C 和j C 对 O 的影响之比,全部比较结果可用成对比较阵 ()1 ,0,ij ij ji n n ij A a a a a ?=>= 表示,A 称为正互反矩阵. 一般地,如果一个正互反阵A 满足: ,ij jk ik a a a ?=,,1,2, ,i j k n = (1) 则A 称为一致性矩阵,简称一致阵.容易证明n 阶一致阵A 有下列性质:
2017模拟试题 小小科学家机器人
2017“小小科学家”学生科技教育体验活动 模拟题 机器人 (考试时间50分钟,满分100分) 学校 年级 姓名 座位号 (注:不会写的字可以用拼音替代) 【笔试部分】(共30分) 一、判断题,对的打“√”,错的打“×”(每小题2分,共10分) 1.机器人无需下载程序即可正常运行 ( ) 2.组装前进后退小车属机械部分,编辑前进后退小车程序属程序部分 ( ) 3.机器人底板有3种尺寸,而连杆类包括扁端连杆共有6种尺寸 ( ) 4.四边形构件属于不稳定结构 ( ) 5.光控风车用到异性杆件2x5转向板 ( ) 二、选择题(每小题2分,共10分) 1、如图1所示,这个构件属于( ) A 、重心稳定结构 B 、中心稳定结构 C 、稳定结构 D 、不稳定结构 2、如图2所示,循迹小车机器人前端感光部件为( ) A 、光敏电阻 B 、接触传感器 C 、双光反射传感器 D 、单光反射传感器 3、机器人程序界面可划分为4个功能区域,其中① 区域称为“编辑功能区”,剩下三个区域分别称 为( ) A 、②属性区 ③命令区 ④程序编写区 B 、②命令区 ③程序编写区 ④命令区 C 、②属性区 ③程序编写区 ④命令区 D 、②命令区 ③属性区 ④程序编写区 4、当我们正确给机器人下载程序时,机器人主板上下载的指示灯会不会闪?( ) A 、会一闪一闪 B 、不会一闪一闪 C 、有时会一闪一闪,有时不会 D 、不知道 5、美国送上火星的探测器属于智能机器人,它可以帮助科学家 了解和分析火星的各种数据,如图4所示,它成为当今美国 科技的象征,中国也在不断研究此类高科技智能机器人,以 下各项哪一项中国技术与火星探测器类似?( ) A 、小汽车 B 、高速铁路 C 、嫦娥号月球探测器 D 、原子弹 三、填空题(第1、2小题2分,第3小题每空1分,共10分) 1、组装光控六脚爬虫机器人需要用到多种配件,其中包括 块主板, 个变速箱。 2、当机器人程序无法下载时,经检查为某一驱动未更新,这一电脑驱动软件为 (选填“光驱驱动”、“USB 驱动”、“显卡驱动”) 3、写出下面6个部件名称。 (1) (2) (3) (4) (5) (6) 笔试部分 操作部分 总 分 统分人签字 题目 判断题 选择题 填空题 实验操作 得分 图2 图4 图1 图3 ① ② ③ ④ ① ② ③ ④
机器学习SVM(支持向量机)实验报告
实验报告 实验名称:机器学习:线性支持向量机算法实现 学员:张麻子学号: *********** 培养类型:硕士年级: 专业:所属学院:计算机学院 指导教员: ****** 职称:副教授 实验室:实验日期:
一、实验目的和要求 实验目的:验证SVM(支持向量机)机器学习算法学习情况 要求:自主完成。 二、实验内容和原理 支持向量机(Support V ector Machine, SVM)的基本模型是在特征空间上找到最佳的分离超平面使得训练集上正负样本间隔最大。SVM是用来解决二分类问题的有监督学习算法。通过引入了核方法之后SVM也可以用来解决非线性问题。 但本次实验只针对线性二分类问题。 SVM算法分割原则:最小间距最大化,即找距离分割超平面最近的有效点距离超平面距离和最大。 对于线性问题: 假设存在超平面可最优分割样本集为两类,则样本集到超平面距离为: 需压求取: 由于该问题为对偶问题,可变换为: 可用拉格朗日乘数法求解。 但由于本实验中的数据集不可以完美的分为两类,即存在躁点。可引入正则化参数C,用来调节模型的复杂度和训练误差。
作出对应的拉格朗日乘式: 对应的KKT条件为: 故得出需求解的对偶问题: 本次实验使用python 编译器,编写程序,数据集共有270个案例,挑选其中70%作为训练数据,剩下30%作为测试数据。进行了两个实验,一个是取C值为1,直接进行SVM训练;另外一个是利用交叉验证方法,求取在前面情况下的最优C值。 三、实验器材 实验环境:windows7操作系统+python 编译器。 四、实验数据(关键源码附后) 实验数据:来自UCI 机器学习数据库,以Heart Disease 数据集为例。 五、操作方法与实验步骤 1、选取C=1,训练比例7:3,利用python 库sklearn 下的SVM() 函数进
谈谈你对机器人的认识
认识机器人 机器人的发展史: 认识机器人首先先了解下robot机器人这一词是怎么来的。1920年捷克作家卡雷尔·卡佩克发表了科幻剧本《罗萨姆的万能机器人》。在剧本中,卡佩克把捷克语“Robota”写成了“Robot”,“Robota”是奴隶的意思。该剧预告了机器人的发展对人类社会的悲剧性影响,引起了大家的广泛关注,被当成了机器人一词的起源。从此,“robot”以及相对应的中文“机器人”一词开始在全世界流行。 上个世纪60年代前后,随着微电子学和计算机技术的迅速发展,自动化技术也取得了飞跃性的变化,开始出现了现在普遍意义上的机器人。1959年,美国英格伯格和德沃尔制造出世界上第一台工业机器人,取名“尤尼梅逊”,意为“万能自动”。尤尼梅逊的样子像一个坦克炮塔,炮塔上伸出一条大机械臂,大机械臂上又接着一条小机械臂,小机械臂再安装着一个操作器。这三部分都可以相对转动、伸缩,很像是人的手臂了。它的发明人专门研究了运动机构与控制信号的关系,编制出程序让机器记住并模仿、重复进行某种动作。英格伯格和德沃尔认为汽车制造过程比较固定,适合用这样的机器人。于是,这台世界上第一个真正意义上的机器人,就应用在了汽车制造生产中。 经过近百年来的发展,机器人已经在很多领域中取得了巨大的应用成绩,其种类也不胜枚举,几乎各个高精尖端的技术领域更是少不了它们的身影。在这期间,机器人的成长经历了三个阶段。第一个阶段中,机器人只能根据事先编好的程序来工作,这时它好像只有干活
儿的手,不懂得如何处理外界的信息。打个比方,如果让这样的机器人去抓会损坏它的东西,它也一定会去做。第二个阶段中,机器人好像有了感觉神经,具有了触觉、视觉、听觉、力觉等功能,这使得它可以根据外界的不同信息做出相应的反馈。如果再让它去抓某些东西,它可能就不干啦。第三个阶段,机器就真正长大成人啦,这时它不仅具有多种技能,能够感知外面的世界,而且它还能够不断自我学习,用自己的思维来决策该做什么和怎样去做。第一阶段的机器人,是小孩子,人们称它为“示教再现型”;第二阶段的机器人是一个青年,人们称它为“感觉型”;第三阶段的机器人则是成年人,称为“智能型”。1968年,美国斯坦福研究所研制出世界上第一台智能型机器人。这个机器人可以在一次性接受由计算机输出的无线遥控指令后,自己找到目标物体并实施对该物体的某些动作。1969年,该研究所对机器人的智能进行测定。他们在房间中央放置了一个高台,在台上放一只箱子,同时在房间一个角落里放了一个斜面体。科学家命令机器人爬上高台并将箱子推到地下去。开始,这个机器人绕着台子转了20分钟,却无法登上去。后来,它发现了角落里的斜面体,于是它走过去,把斜面体推到平台前并沿着这个斜面体爬上了高台将箱子推了下去。这个测试表明,机器人已经具备了一定的发现、综合判断,决策等智能。 到了上个世纪70年代,第二代机器人开始迅速发展并进入实用和普及的阶段,而第三代机器人在今天也已经得到了突飞猛进的变化。它能够独立判断和行动,具有记忆、推理和决策的能力,在自身
支持向量机算法学习总结
题目:支持向量机的算法学习 姓名: 学号: 专业: 指导教师:、 日期:2012年6 月20日
支持向量机的算法学习 1. 理论背景 基于数据的机器学习是现代智能技术中的重要方面,研究从观测数据 (样本) 出发寻找规律,利用这些规律对未来数据或无法观测的数据进行预测。迄今为止,关于机器学习还没有一种被共同接受的理论框架,关于其实现方法大致可以分为三种: 第一种是经典的(参数)统计估计方法。包括模式识别、神经网络等在内,现有机器学习方法共同的重要理论基础之一是统计学。参数方法正是基于传统统计学的,在这种方法中,参数的相关形式是已知的,训练样本用来估计参数的值。这种方法有很大的局限性,首先,它需要已知样本分布形式,这需要花费很大代价,还有,传统统计学研究的是样本数目趋于无穷大时的渐近理论,现有学习方法也多是基于此假设。但在实际问题中,样本数往往是有限的,因此一些理论上很优秀的学习方法实际中表现却可能不尽人意。 第二种方法是经验非线性方法,如人工神经网络(ANN。这种方法利用已知样本建立非线性模型,克服了传统参数估计方法的困难。但是,这种方法缺乏一种统一的数学理论。 与传统统计学相比,统计学习理论( Statistical Learning Theory 或SLT) 是一种专门研究小样本情况下机器学习规律的理论。该理论针对小样本统计问题建立了一套新的理论体系,在这种体系下的统计推理规则不仅考虑了对渐近性能的要求,而且追求在现有有限信息的条件下得到最优结果。V. Vapnik 等人从六、七十年代开始致力于此方面研究[1] ,到九十年代中期,随着其理论的不断发展和成熟,也由于神经网络等学习方法在理论上缺乏实质性进展,统计学习理论开始受到越来越广泛的重视。 统计学习理论的一个核心概念就是VC维(VC Dimension)概念,它是描述函数集或学习机器的复杂性或者说是学习能力(Capacity of the machine) 的一个重要指标,在此概念基础上发展出了一系列关于统计学习的一致性(Consistency) 、收敛速度、推广性能(GeneralizationPerformance) 等的重要结论。 支持向量机方法是建立在统计学习理论的VC 维理论和结构风险最小原理基础上的,根据有限的样本信息在模型的复杂性(即对特定训练样本的学习精度,Accuracy) 和学习能力(即无错误地识别任意样本的能力)之间寻求最佳折衷,以
支持向量机
支持向量机 支持向量机模型选择研究 摘要:统计学习理论为系统地研究有限样本情况下的机器学习问题提供了一套 比较完整的理论体系。支持向量机 (suPportvectorMachine,SVM)是在该理论体系下产生的一种新的机器学习方法,它能较好地解决小样本、非线性、维数灾难和局部极小等问题,具有很强的泛化能力。支持向量机目前已经广泛地应用于模式识别、回归估计、概率密度估计等各个领域。不仅如此,支持向量机的出现推动了基于核的学习方法(Kernel-based Learning Methods) 的迅速发展,该方法使得研究人员能够高效地分析非线性关系,而这种高效率原先只有线性算法才能得到。目前,以支持向量机为主要代表的核方法是机器学习领域研究的焦点课题之一。 众所周知,支持向量机的性能主要取决于两个因素:(1)核函数的选择;(2)惩罚 系数(正则化参数)C的选择。对于具体的问题,如何确定SVM中的核函数与惩罚系 数就是所谓的模型选择问题。模型选择,尤其是核函数的选择是支持向量机研究的中心内容之一。本文针对模型选择问题,特别是核函数的选择问题进行了较为深入的研究。其中主要的内容如下: 1.系统地归纳总结了统计学习理论、核函数特征空间和支持向量机的有关理论与算法。 2.研究了SVM参数的基本语义,指出数据集中的不同特征和不同样本对分类结 果的影响可以分别由核参数和惩罚系数来刻画,从而样木重要性和特征重要性的考察可以归结到SVM的模型选择问题来研究。在
对样本加权SVM模型(例如模糊SVM)分析的基础上,运用了特征加权SVM模型,即FWSVM,本质上就是SVM与特征加权的结合。 3,在系统归纳总结SVM模型选择。尤其是核函数参数选择的常用方法(例如交叉验证技术、最小化LOO误差及其上界、优化核评估标准)。关键词:机器学习;模式分类;支持向量机;模型选择;核函数;核函数评估 支持向量机基础 引言 机器学习的科学基础之一是统计学。传统统计学所研究的是渐近理论,即当样本数目趋于无穷大时的极限特性。基于传统统计学的机器学习,也称为统计模式识别,由Duda等人提出。Duda的贡献主要是以经典统计理论为工具刻画了模式识别与机器学习的各类任务,同时暗示了对所建模型的评价方法。然而,在实际应用中,学习样本的数目往往是有限的,特别当问题处于高维空问时尤其如此。统计学习理论研究的是有限样本情况下的机器学习问题,它基于PAC(Probably Approximately Correct)框架给出关于学习算法泛化性能的界,从而可以得出误差精度和样木数目之间的关系。这样,样木集合成为泛化指标的随机变量,由此建立了结构风险理论。 Minsky和PaPert在20世纪60年代明确指出线性学习机计算能力有限。总体上,现实世界复杂的应用需要比线性函数更富有表达能力的假设空间"多层感知器可以作为这个问题的一个解,由此导向了 多层神经网络的反向传播算法。核函数表示方式提供了另一条解决途径,即将数据映射到高维空间来增强线性学习机的计算能力。核函数的引入最终使得在适当的特征空间中使用人们熟知的线性算法高效地检测非线性关系成为一可能。SVM是建立在统计学习理论(包括核函数的表示理论)基础上的第一个学习算法,目前主要应用于求解监督学习问题,即分类和回归问题。SVM以泛化能力为目标,其目的不是
认识工业机器人
认识工业机器人 机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多种学科而形成的高新技术,是当代研究十分活跃、应用日益广泛的领域。而且,机器人应用情况是反映一个国家工业自动化水平的重要标志。本次任务的主要内容就是了解工业机器人的现状和发展趋势;通过现场参观,认识工业机器人相关企业;现场观摩或在技术人员的指导下操作ABB工业机器人,了解其基本组成。 一、工业机器人的定义及特点 1.工业机器人的定义 国际上对机器人的定义有很多。 美国机器人协会(RIA)将工业机器人定义为:“工业机器人是用来进行搬运材料、零部件、工具等可再编程的多功能机械手,或通过不同程序的调用来完成各种工作任务的特种装置。” 日本工业机器人协会(JIRA)将工业机器人定义为:“工业机器人是一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器。” 在我国1989年的国际草案中,工业机器人被定义为:“一种自动定位控制,可重复编程、多功能的、多自由度的操作机。操作机被定义为:具有和人手臂相似的动作功能,可在空间抓取物体或进行其他操作的机械装置。” 国际标准化组织(ISO)曾于1984年将工业机器人定义为:“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助于可编程的操作来处理各种材料、零件、工具和专用装置,以执行各种任务。” 2.工业机器人的特点 (1)可编程
生产自动化的进一步发展是柔性自动化。工业机器人可随其工作环境变化的需要而再编程,因此它在小批量、多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。 (2)拟人化 工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有计算机。此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语音功能传感器等。 (3)通用性 除了专门设计的专用的工业机器人外,一般机器人在执行不同的作业任务时具有较好的通用性。例如,更换工业机器人手部末端执行器(手爪、工具等)便可执行不同的作业任务。 (4)机电一体化 第三代智能机器人不仅具有获取外部环境信息的各种传感器,而且还具有记忆能力、语言理解能力、图像识别能力、推理判断能力等人工智能,这些都是微电子技术的应用,特别是与计算机技术的应用密切相关。工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化及精细物流等先进制造技术,技术综合性强。 二、工业机器人的历史和发展趋势 1. 工业机器人的诞生 “机器人”(Robot)这一术语是1921年捷克著名剧作家、科幻文学家、童话寓言家卡雷尔·恰佩克首创的,它成了“机器人”的起源,此后一直沿用至今。不过,人类对于机器人的梦想却已延续数千年之久。如古希腊古罗马神话中冶炼之神用黄金打造的机械仆人、希腊神话《阿鲁哥探险船》中的青铜巨人泰洛斯、犹太传说中的泥土巨人、我国西周时代能歌善舞的木偶“倡者”和三国时期诸葛亮的“木牛流马”传说等。而到了现代,人类对于机器人的向往,从机器人频繁出现在科幻小说和电影中已不难看出,科技的进步让机器人不仅停留在科幻故事
最新“小小科学家”广东省少年儿童科学教育体验活动 第三届天文试题初中组
学校:班级:姓名: “小小科学家”广东省少年儿童科学教育体验活动 天文试题(初中年级组)B卷(考试时间40分钟,满分100分)【基础知识部分】(共30分) 一.选择题(每空1分,共5分) 1.距离地球最近的天体是()A.太阳B.金星 C.月球 D.北极星 2.著名的织女星位于下列星座中的哪一个() A. 天鹰座 B.天琴座 C.大熊座 D.小熊座 3.潮汐即海水有规律的涨落现象,当地球上产生大潮时,日地月的位置关系是()A.三者在同一直线上且月球位于日、地中间 B.太阳和地球的连线与地球和月亮的连线成一个直角 C.三者在同一直线上且地球位于月球和太阳的中间 D.A和C都正确 4.地球上日夜交替的原因主要是由于() A.地球的公转 B. 地轴是倾斜的 C.地球的自转 D.月亮绕地球运动 5.中秋节晚上九点,佛山的小王陪家人赏月,此时月亮位于天空的方位大致是()A.东南方 B.西南方 C.正东方 D.正西方 二.填空题(每空0.5分,共5分) 1.2010年10月1日18时59分57秒我国在成功发射“嫦娥二号”探月卫星。 2.地球上重量120千克的物体,到了月球上重量只有千克。 3.根据日食和月食的产生原因可知日食发生在农历前后,月食发生在农历前后。 4.当北斗星的“斗柄”指向东方时的季节为。 5.人们在天气晴朗的清晨可以看到太阳和月亮同时出现在天空中,请问这个时候的月相是,晴朗的傍晚的也可以见到这种现象,请问这个时候的月相是。 6.天文实验箱里给大家提供了光学望远镜,使观察物体变得清晰,在目镜中观察物体,它(填“能”或“不能”)使物体变大。 7.著名的哈雷彗星最近一次回归是在1986年,下次回归的时间是年。 8.首次在太空行走的中国航天员是。 三.实验数据题(共10分) 太阳系,由太阳、大行星及其卫星、小行星、彗星、流星体和行星际物质构成的天体系统。太阳是太阳系的中心天体,占总质量的99.86%,其他天体都在太阳的引力作用下绕其公转。太阳系中的八大行星,
机器学习SVM习题集
SVM 1.判断题 (1) 在SVM训练好后,我们可以抛弃非支持向量的样本点,仍然可以对新样本进行分类。(T) (2) SVM对噪声(如来自其他分布的噪声样本)鲁棒。(F) 2.简答题 现有一个点能被正确分类且远离决策边界。如果将该点加入到训练集,为什么SVM的决策边界不受其影响,而已经学好的logistic回归会受影响? 答:因为SVM采用的是hinge loss,当样本点被正确分类且远离决策边界时,SVM给该样本的权重为0,所以加入该样本决策边界不受影响。而logistic回归采用的是log损失,还是会给该样本一个小小的权重。 3.产生式模型和判别式模型。(30分,每小题10分) 图2:训练集、最大间隔线性分类器和支持向量(粗体) (1)图中采用留一交叉验证得到的最大间隔分类器的预测误差的估计是多少(用样本数表示即可)? 从图中可以看出,去除任意点都不影响SVM的分界面。而保留所有样本时,所有的样本点都能被正确分类,因此LOOCV的误差估计为0。 (2)说法“最小结构风险保证会找到最低决策误差的模型”是否正确,并说明理由。(F) 最小结构风险(SRM)只能保证在所有考虑的模型中找到期望风险上界最小的模型。 (3)若采用等协方差的高斯模型分别表示上述两个类别样本的分布,则分类器的VC维是多少?为什么? 等协方差的高斯模型的决策边界为线性,因为其VC维维D+1。题中D=2.
4、SVM 分类。(第1~5题各4分,第6题5分,共25分) 下图为采用不同核函数或不同的松弛因子得到的SVM 决策边界。但粗心的实验者忘记记录每个图形对应的模型和参数了。请你帮忙给下面每个模型标出正确的图形。 (1)、211min , s.t.2N i i C ξ=??+ ? ?? ∑w ()00, 1, 1,....,, T i i i y w i N ξξ≥+≥-=w x 其中0.1C =。 线性分类面,C 较小, 正则较大,||w||较小,Margin 较大, 支持向量较多(c ) (2)、211min , s.t.2N i i C ξ=??+ ? ?? ∑w ()00, 1, 1,....,, T i i i y w i N ξξ≥+≥-=w x 其中1C =。 线性分类面,C 较大, 正则较小,||w||较大,Margin 较小 支持向量的数目少(b ) (3)、()111 1max ,2N N N i i j i j i j i i j y y k ααα===?? - ??? ∑∑∑x x 1 s.t. 0, 1,....,, 0N i i i i C i N y αα=≤<==∑ 其中()()2 ,T T k '''=+x x x x x x 。 二次多项式核函数,决策边界为二次曲线 (d)
浅谈对工业机器人的认识
浅谈对工业机器人的认识 人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据 。,工业机器人做为完成任务的机具,按用途包括以下几种:(a)搬运、上料机器人;(b)喷涞机器人;(c)焊接与切割机器人,点焊与弧焊;(d)装配机器人;(e)最后工序机器人,完成打毛剌、分类、检验、包装等工作。可见工业机器人的用途实为广泛。 工业机器人技术特点: (1)技术先进工业机器人集精密化、柔性化、智能化、软件应用开发等先进制造技术于一体,通过对过程实施检测、控制、优化、调度、管理和决策,实现增加产量、提高质量、降低成本、减少资源消耗和环境污染,是工业自动化水平的最高体现。 (2)技术升级工业机器人与自动化成套装备具备精细制造、精细加工以及柔性生产等技术特点,是继动力机械、计算机之后,出现的全面延伸人的体力和智力的新一代生产工具,是实现生产数字化、自动化、网络化以及智能化的重要手段。
(3)应用领域广泛工业机器人与自动化成套装备是生产过程的关键设备,可用于制造、安装、检测、物流等生产环节,并广泛应用于汽车整车及汽车零部件、工程机械、轨道交通、低压电器、电力、IC装备、军工、烟草、金融、医药、冶金及印刷出版等众多行业,应用领域非常广泛。 (4)技术综合性强工业机器人与自动化成套技术,集中并融合了多项学科,涉及多项技术领域,包括工业机器人控制技术、机器人动力学及仿真、机器人构建有限元分析、激光加工技术、模块化程序设计、智能测量、建模加工一体化、工厂自动化以及精细物流等先进制造技术,技术综合性强。 工业机器人,对我国的经济所做出的贡献是可想而知的。随着我国的建筑业、采矿业、铁路和公共建设、水力工程建设和工程机械、建筑机械等其他制造行业的规模扩大和技术升级也将对工业机器人产业起到推动作用。建筑工程机械的结构件多为焊接件,通过工业机器人焊接可提高焊接质量和效率,满足市场的需求。 我国工业机器人的发展趋势:根据2l世纪初我国国民经济对先进制造及自动化技术的需求,瞄准国际前沿高技术发展方向创新性地研究和开发工业机器人技术领域的基础技术、产品技术和系统技术。我国对未来工业机器人技术发展的重点有: 1、危险,恶劣环境作业机器人:主要有防暴、高压带电清扫、星球检测、油汽管道等机器人; 2、,医用机器人:主要有脑外科手术辅助机器人,遥控操作辅助正骨等; 3、仿生机器人:主要有移动机器人,网络遥控操作机器人等。其发展趋势是智能化、低成本、高可靠性和易于集成。
小小科学家
小小科学家 在21世纪50年代初,诞生了一个伟大的小天才—奇奇。她喜欢研究大自然,对一切都非常好奇,而且心地非常善良,总喜欢发明一些新奇、古怪的玩意儿,帮助遇到困难的人。她还有一个远大的理想——让恐龙再生,与人类和平相处。 有一个星期天的下午,太阳火辣辣的,奇奇想到公园里透透气,走着走着,突然听到“咔嚓、咔嚓”的声音,寻声走去,发现一个老爷爷在修剪树叶,虽然头上的汗水像雨点一样落下来,但他毫不在意,不停地使唤着手中的大剪刀。奇奇觉得很好奇,问:“老爷爷,你在干什么呀?”老爷爷说:“我在把树剪成动物的样子,让这个城市更美丽。”“这多累呀!”奇奇想,“要是能发明出一种动物树种子,那老爷爷就不用忙了!”想到这儿,奇奇决定去研究一下。 奇奇来到她的专门研究室,捉了一只蝗虫,又要了一粒树种子,先取出蝗虫的基因,然后用多功能电脑把树种制成了蝗虫的形状,接着把树种和基因都放入同一个实验瓶中,紧接着,取出融合药水,把药水注入到实验瓶中,两样东西融合后,再把它取出来,种到花园中,在土壤中注入超级生长素,几分钟后,实验宣告失败。到底是什么原因呢??奇奇百思不得其解,她毫不灰心,通过不分昼夜地查资料、做实验,终于成功了,奇奇从兔子的汗水中提炼出了一种氧化物,这种氧化物居然能影响动物的生长基因,使树的基因发生突变,这样,第一棵兔树就诞生了,照这个方法,奇奇还培育出了青蛙、大象、章鱼、天鹅等动物树种子。奇奇把研究成果在环境报上发表,在科学界引起了一阵轰动。国家环境组织连忙采纳这个报告,进行种子培育,生产出了各种种子,运往世界各地。 在一些风沙比较大的地方,人们种上体积庞大的大象树,有效地抵御了风沙,使城市更整洁,在海洋公园里,种上章鱼、乌龟、企鹅树,使海洋公园更加美丽,在游泳池边,种上天鹅树,让人们跟天鹅共舞。 而奇奇呢?仍然在实验室里为自己的梦想奋斗着,他到底还会发明出什么东西呢?我也不知道,请关心奇奇的小朋友继续期待!有人想做救死扶伤的医生,有人想做保家卫国的战士,有人想做让人神采飞扬的美容师,还有人想做替人量体裁衣的裁缝,我却想做一位科学家。 小小科学家 假如我是一位科学家,我会发明一种神奇的大药丸,甜丝丝的,无论得了什么病,只要吃下它,都能治愈。那样老年人更加健康,成年人更加生机勃勃,小朋友更加活泼可爱。大家就都不用为生病发愁了。 假如我是一位科学家,我会开着我的“聪明女孩号”宇宙飞船,和杨利伟叔叔一起探索宇宙的奥秘,去空间站,与世界各国的航天员一起去参加建设。为祖国的航天事业做出自己的贡献。 假如我是一位科学家,看到辛勤的园丁为了我们呕心沥血,日夜操劳,吸食着粉笔灰尘,有损健康,我就会发明一种神气的粉笔,它没有灰尘,让使用它的每一位老师,都能感觉到清凉与芬芳,这就是神奇粉笔的小小功效! 不过,要梦想成真,千里之行,始于足下;九层之台,起于累土。从现在起,我应抓住分分秒秒,好好学习,从一点一滴做起!让假设变成现实,梦想成真! 小小科学家 人类生活在群居的社会里,所以每个人都应该做一些对社会有贡献的事。因为人各有志,所以他们选择的职业也各有不同。例如,有人想做富有的商人,友人希望做有权势的大官,有的人喜欢做救人济世的医生,有的人喜欢做培养人才的老师,我却希望做一个科学家。 假如我是一个科学家,我要研制一种廉价而能调节冷暖的衣服,使人穿了在酷热的天气里也会感到清凉,在严寒的时候也能觉得温暖如春,使贫穷的人免受寒冻之苦
支持向量机(SVM)算法推导及其分类的算法实现
支持向量机算法推导及其分类的算法实现 摘要:本文从线性分类问题开始逐步的叙述支持向量机思想的形成,并提供相应的推导过程。简述核函数的概念,以及kernel在SVM算法中的核心地位。介绍松弛变量引入的SVM算法原因,提出软间隔线性分类法。概括SVM分别在一对一和一对多分类问题中应用。基于SVM在一对多问题中的不足,提出SVM 的改进版本DAG SVM。 Abstract:This article begins with a linear classification problem, Gradually discuss formation of SVM, and their derivation. Description the concept of kernel function, and the core position in SVM algorithm. Describes the reasons for the introduction of slack variables, and propose soft-margin linear classification. Summary the application of SVM in one-to-one and one-to-many linear classification. Based on SVM shortage in one-to-many problems, an improved version which called DAG SVM was put forward. 关键字:SVM、线性分类、核函数、松弛变量、DAG SVM 1. SVM的简介 支持向量机(Support Vector Machine)是Cortes和Vapnik于1995年首先提出的,它在解决小样本、非线性及高维模式识别中表现出许多特有的优势,并能够推广应用到函数拟合等其他机器学习问题中。支持向量机方法是建立在统计学习理论的VC 维理论和结构风险最小原理基础上的,根据有限的样本信息在模型的复杂性(即对特定训练样本的学习精度,Accuracy)和学习能力(即无错误地识别任意样本的能力)之间寻求最佳折衷,以期获得最好的推广能力。 对于SVM的基本特点,小样本,并不是样本的绝对数量少,而是与问题的复杂度比起来,SVM算法要求的样本数是相对比较少的。非线性,是指SVM擅长处理样本数据线性不可分的情况,主要通过松弛变量和核函数实现,是SVM 的精髓。高维模式识别是指样本维数很高,通过SVM建立的分类器却很简洁,只包含落在边界上的支持向量。
支持向量机模型的研究与设计
百度文库- 让每个人平等地提升自我 支持向量机实验模型的研究与设计 用户手册 1.简介 本模型是基于SVM(即支持向量机)的机器学习模型,能够将线性可分的和非线性可分的两种情况下的两类数据集进行分类,并对分类结果进行分析。用户可以选择装载已有的数据进行分类,也可以手动创建两类数据集进行分类。用户根据要分类的数据集,从两个训练算法中选择适当的训练算法,并且从三个核函数中选择适当的核函数对数据集进行分类。 2.系统要求 操作系统方面:Windows 98,Windows NT,Windows ME,Windows 2000, Windows XP及Windows 2003系统; 应用软件方面:必须安装MATLAB 或以上版本 3.使用说明 (1)首先运行或者文件,进入模型主界面,如下图: 用户在进入实验前必须先按“设置路径”按钮设置路径,然后就可以通过“进入支持向量机模型”按钮进入模型。
百度文库- 让每个人平等地提升自我(2)进入支持向量机机器学习模型后,界面如下图:用户可以通过各个按钮对模型进行操作 (3)装载或创建数据 a.通过“装载数据”按钮装载数据,用户选择数据所在的文件 b.通过“创建数据”按钮创建数据
百度文库- 让每个人平等地提升自我 可以创建线性可分数据集如下: 可以创建非线性可分数据集如下: C.装载数据或创建数据后的界面上显示数据点,如下图:
百度文库- 让每个人平等地提升自我 (4)通过“训练SVM”按钮对数据集进行分类 在此仅介绍了对线性可分数据集分类的情况,对其他的数据集,操作也跟如下类似。在数据集线性可分情况下,使用不同算法的分类结果: 选择SMO训练算法和Linear核函数的分类结果: (5)通过“重新设置”按钮,重新选择SMO训练算法和Polynomial核函数的分类结果
机器人动力学汇总
机器人动力学研究的典型方法和应用 (燕山大学 机械工程学院) 摘 要:本文介绍了动力学分析的基础知识,总结了机器人动力学分析过程中比较常用的动力学分析的方法:牛顿—欧拉法、拉格朗日法、凯恩法、虚功原理法、微分几何原理法、旋量对偶数法、高斯方法等,并且介绍了各个方法的特点。并通过对PTl300型码垛机器人弹簧平衡机构动力学方法研究,详细分析了各个研究方法的优越性和方法的选择。 前 言:机器人动力学的目的是多方面的。机器人动力学主要是研究机器人机构的动力学。机器人机构包括机械结构和驱动装置,它是机器人的本体,也是机器人实现各种功能运动和操作任务的执行机构,同时也是机器人系统中被控制的对象。目前用计算机辅助方法建立和求解机器人机构的动力学模型是研究机器人动力学的主要方法。动力学研究的主要途径是建立和求解机器人的动力学模型。所谓动力学模指的是一组动力学方程(运动微分方程),把这样的模型作为研究力学和模拟运动的有效工具。 报告正文: (1)机器人动力学研究的方法 1)牛顿—欧拉法 应用牛顿—欧拉法来建立机器人机构的动力学方程,是指对质心的运动和转动分别用牛顿方程和欧拉方程。把机器人每个连杆(或称构件)看做一个刚体。如果已知连杆的表征质量分布和质心位置的惯量张量,那么,为了使连杆运动,必须使其加速或减速,这时所需的力和力矩是期望加速度和连杆质量及其分布的函数。牛顿—欧拉方程就表明力、力矩、惯性和加速度之间的相互关系。 若刚体的质量为m ,为使质心得到加速度a 所必须的作用在质心的力为F ,则按牛顿方程有:ma F = 为使刚体得到角速度ω、角加速度εω= 的转动,必须在刚体上作用一力矩M , 则按欧拉方程有:εωI I M += 式中,F 、a 、M 、ω、ε都是三维矢量;I 为刚体相对于原点通过质心并与刚
支持向量机训练算法综述_姬水旺
收稿日期:2003-06-13 作者简介:姬水旺(1977)),男,陕西府谷人,硕士,研究方向为机器学习、模式识别、数据挖掘。 支持向量机训练算法综述 姬水旺,姬旺田 (陕西移动通信有限责任公司,陕西西安710082) 摘 要:训练SVM 的本质是解决二次规划问题,在实际应用中,如果用于训练的样本数很大,标准的二次型优化技术就很难应用。针对这个问题,研究人员提出了各种解决方案,这些方案的核心思想是先将整个优化问题分解为多个同样性质的子问题,通过循环解决子问题来求得初始问题的解。由于这些方法都需要不断地循环迭代来解决每个子问题,所以需要的训练时间很长,这也是阻碍SVM 广泛应用的一个重要原因。文章系统回顾了SVM 训练的三种主流算法:块算法、分解算法和顺序最小优化算法,并且指出了未来发展方向。关键词:统计学习理论;支持向量机;训练算法 中图分类号:T P30116 文献标识码:A 文章编号:1005-3751(2004)01-0018-03 A Tutorial Survey of Support Vector Machine Training Algorithms JI Shu-i wang,JI Wang -tian (Shaanx i M obile Communicatio n Co.,Ltd,Xi .an 710082,China) Abstract:Trai n i ng SVM can be formulated into a quadratic programm i ng problem.For large learning tasks w ith many training exam ples,off-the-shelf opti m i zation techniques quickly become i ntractable i n their m emory and time requirem ents.T hus,many efficient tech -niques have been developed.These techniques divide the origi nal problem into several s maller sub-problems.By solving these s ub-prob -lems iteratively,the ori ginal larger problem is solved.All proposed methods suffer from the bottlen eck of long training ti me.This severely limited the w idespread application of SVM.T his paper systematically surveyed three mains tream SVM training algorithms:chunking,de -composition ,and sequenti al minimal optimization algorithms.It concludes with an illustrati on of future directions.Key words:statistical learning theory;support vector machine;trai ning algorithms 0 引 言 支持向量机(Support Vector M achine)是贝尔实验室研究人员V.Vapnik [1~3]等人在对统计学习理论三十多年的研究基础之上发展起来的一种全新的机器学习算法,也使统计学习理论第一次对实际应用产生重大影响。SVM 是基于统计学习理论的结构风险最小化原则的,它将最大分界面分类器思想和基于核的方法结合在一起,表现出了很好的泛化能力。由于SVM 方法有统计学习理论作为其坚实的数学基础,并且可以很好地克服维数灾难和过拟合等传统算法所不可规避的问题,所以受到了越来越多的研究人员的关注。近年来,关于SVM 方法的研究,包括算法本身的改进和算法的实际应用,都陆续提了出来。尽管SVM 算法的性能在许多实际问题的应用中得到了验证,但是该算法在计算上存在着一些问题,包括训练算法速度慢、算法复杂而难以实现以及检测阶段运算量大等等。 训练SVM 的本质是解决一个二次规划问题[4]: 在约束条件 0F A i F C,i =1,, ,l (1)E l i =1 A i y i =0 (2) 下,求 W(A )= E l i =1A i -1 2 E i,J A i A j y i y j {7(x i )#7(x j )} = E l i =1A i -1 2E i,J A i A j y i y j K (x i ,x j )(3)的最大值,其中K (x i ,x j )=7(x i )#7(x j )是满足Merce r 定理[4]条件的核函数。 如果令+=(A 1,A 2,,,A l )T ,D ij =y i y j K (x i ,x j )以上问题就可以写为:在约束条件 +T y =0(4)0F +F C (5) 下,求 W(+)=+T l -12 +T D +(6) 的最大值。 由于矩阵D 是非负定的,这个二次规划问题是一个凸函数的优化问题,因此Kohn -Tucker 条件[5]是最优点 第14卷 第1期2004年1月 微 机 发 展M icr ocomputer Dev elopment V ol.14 N o.1Jan.2004