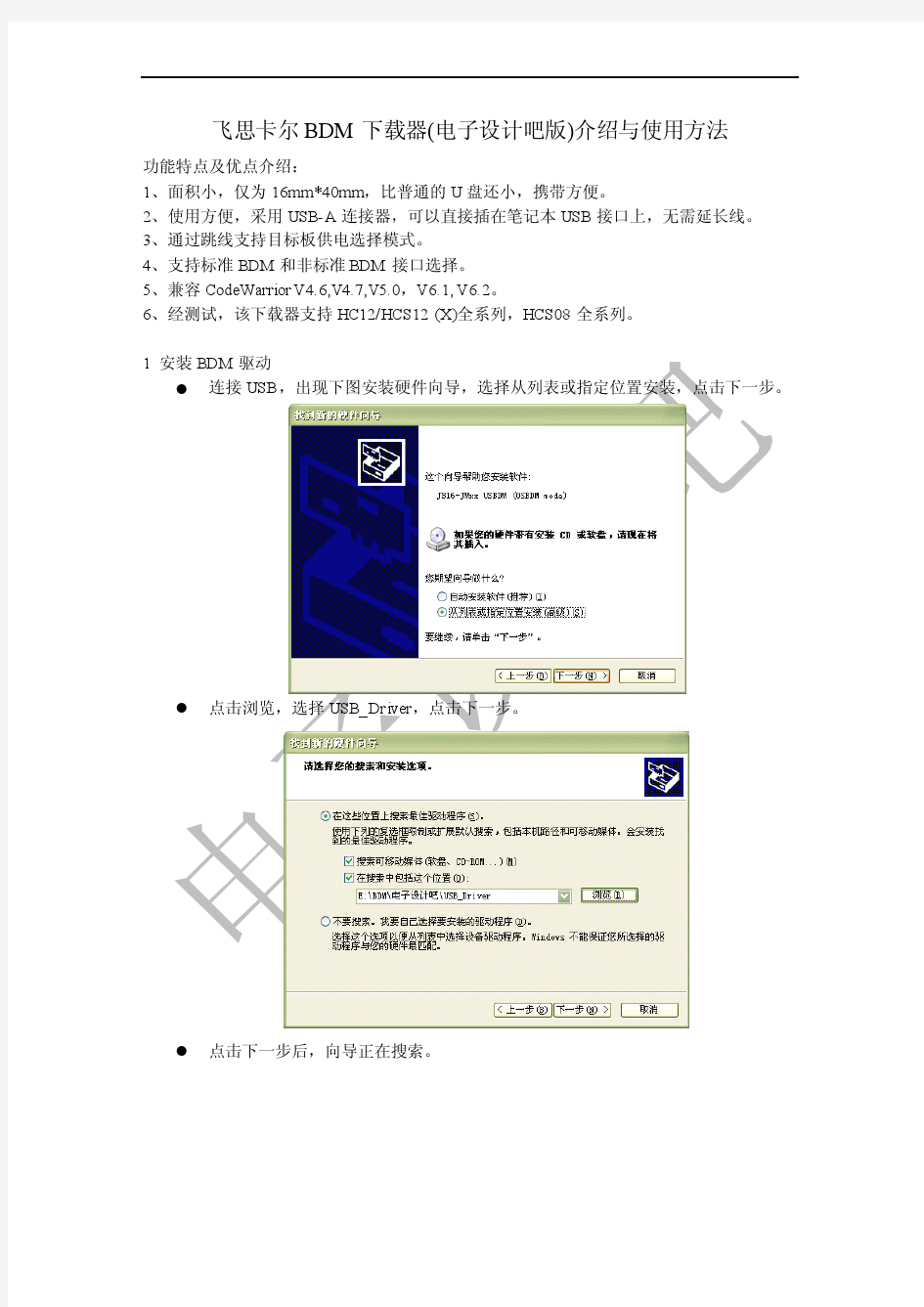
飞思卡尔BDM下载器的使用

飞思卡尔单片机问题总结
飞思卡尔单片机问题总结 常见问题回答精华列表 为了方便网友查询相关问题,特将常见问题精华帖整理归类 本帖不断更新,欢迎网友们给出建议 另外,在提问时,请在标题中选用具体问题的字眼避免使用请问某某、请教、紧急求助等作为标题。对于具体器件,可以直接把器件类型写上,比如HC08QY4等;对于具体技术,比如CAN/LIN/ZigBee等也直接写明,便于版主分类回答,也便于其他网友查询。 一、flash/EEPROM的操作 Tips: a、HC08系列MCU中,很多Monitor ROM中固化了对flash操作的函数,用户只需调用即可,参考AN2874等应用笔记 b、HCS08系列和HCS12系列MCU对flash的操作十分类似,可以参考 AN2140 1、FLASH操作函数 (HCS08系列)
https://www.360docs.net/doc/bf884808.html,/dispbbs.asp?boardID=3&RootID=111907&ID= 111907 2、如何将flash中的程序copy至ram中 https://www.360docs.net/doc/bf884808.html,/dispbbs.asp?boardID=3&RootID=104074&ID= 104074 3、S12内部寄存器的映射 https://www.360docs.net/doc/bf884808.html,/dispbbs.asp?boardID=3&RootID=103261&ID= 103261 4、S12EEPROM的使用、 INITRG,INITRM,INITEE寄存器的说明https://www.360docs.net/doc/bf884808.html,/dispbbs.asp?boardID=3&RootID=102260&ID= 102260 5.INITRM寄存器的使用 https://www.360docs.net/doc/bf884808.html,/dispbbs.asp?boardID=3&RootID=103214&ID= 103214 二、编程技巧
飞思卡尔单片机编程
关于Codewarrior 中的 .prm 文件 网上广泛流传的一篇文章讲述的是8位飞思卡尔单片机的内存映射,这几天,研究了一下Codewarrior 5.0 prm文件,基于16位单片机MC9S12XS128,一点心得,和大家分享。有什么错误请指正。 正文: 关于Codewarrior 中的.prm 文件 要讨论单片机的地址映射,就必须要接触.prm文件,本篇的讨论基于Codewarrior 5.0 编译器,单片机采用MC9S12XS128。 通过项目模板建立的新项目中都有一个名字为“project.prm”的文件,位于Project Settings->Linker Files文件夹下。一个标准的基于XS128的.prm文件起始内容如下: .prm文件范例: NAMES END SEGMENTS RAM = READ_WRITE DATA_NEAR 0x2000 TO 0x3FFF;
READ_ONLY DATA_NEAR IBCC_NEAR 0x4000 TO 0x7FFF; ROM_C000 = READ_ONLY DATA_NEAR IBCC_NEAR 0xC000 TO 0xFEFF; //OSVECTORS = READ_ONLY 0xFF10 TO 0xFFFF; EEPROM_00 = READ_ONLY DATA_FAR IBCC_FAR 0x000800 TO 0x000BFF; EEPROM_01 = READ_ONLY DATA_FAR IBCC_FAR 0x010800 TO 0x010BFF; EEPROM_02 = READ_ONLY DATA_FAR IBCC_FAR 0x020800 TO 0x020BFF; EEPROM_03 = READ_ONLY DATA_FAR IBCC_FAR 0x030800 TO 0x030BFF; EEPROM_04 = READ_ONLY DATA_FAR IBCC_FAR 0x040800 TO 0x040BFF; EEPROM_05 = READ_ONLY DATA_FAR IBCC_FAR 0x050800 TO 0x050BFF; EEPROM_06 = READ_ONLY DATA_FAR IBCC_FAR 0x060800 TO 0x060BFF; EEPROM_07 = READ_ONLY DATA_FAR IBCC_FAR 0x070800 TO 0x070BFF; PAGE_F8 = READ_ONLY DATA_FAR IBCC_FAR 0xF88000 TO 0xF8BFFF;
飞思卡尔单片机LED控制例程详解
我的第一个LED程序 准备工作: 硬件:Freescale MC9S08JM60型单片机一块; 软件:集成开发环境codewarrior IDE; 开发板上有两个LED灯,如下图所示: 实验步骤: 1.首先,确保单片机集成开发环境及USBDM驱动正确安装。其中USBDM的安装步骤如下:?假设之前安装过单片机的集成开发环境6.3版本:CW_MCU_V6_3_SE; ?运行USBDM_4_7_0i_Win,这个程序会在c盘的程序文件夹下增加一个目录C:\Program Files\pgo\USBDM 4.7.0,在这个目录下: 1〉C:\ProgramFiles\pgo\USBDM 4.7.0\FlashImages\JMxx下的文件 USBDM_JMxxCLD_V4.sx是下载器的固件文件; 2〉C:\Program Files\pgo\USBDM 4.7.0\USBDM_Drivers\Drivers下有下载器的usb 驱动 所以在插入usb下载器,电脑提示发现新的usb硬件的时候,选择手动指定驱动 安装位置到以上目录即可。 ?运行USBDM_4_7_0i_Win之后,还会在目录: C:\Program Files\Freescale\CodeWarrior for Microcontrollers V6.3\prog\gdi 下增加一些文件,从修改时间上来看,增加了6个文件,这些文件是为了在codewarrior 集成开发环境下对usb下载器的调试、下载的支持。
2.新建一个工程,工程建立过程如下: ?运行单片机集成开发环境codewarrior IDE ?出现如下界面 ●Create New Project :创建一个新项目工程 ●Load Example Project :加载一个示例工程 ●Load Previous Project :加载以前创建过的工程 ●Run Getting started Tutorial:运行CodeWarrior软件帮助文档 ●Start Using CodeWarrior:立刻使用CodeWarrior ?点击Create New project按钮,以创建一个新的工程,出现选择CPU的界面 如下,请选择HCS08/HCS08JM Family/MC9S08JM60,在右边的Connection窗口
飞思卡尔MC9S12XS128技术手册翻译AD
飞思卡尔MC9S12XS128技术手册(AD转换部分) 英文资料:飞思卡尔MC9S12XS256RMV1官方技术手册 1.1 XS12系列单片机的特点 XS12系列单片机特点如下: ·16位S12CPU —向上支持S12模糊指令集并去除了其中的MEM, WAV, WAVR, REV, REVW 五条指令; —模块映射地址机制(MMC); —背景调试模块(BDM); ·CRG时钟和复位发生器 —COP看门狗; —实时中断; ·标准定时器模块 —8个16位输入捕捉或输出比较通道;; —16位计数器,8位精密与分频功能; —1个16位脉冲累加器; ·周期中断定时器PIT —4具有独立溢出定时的定时器; —溢出定时可选范围在1到2^24总线时钟; —溢出中断和外部触发器; ·多达8个的8位或4个16位PWM通道 —每个通道的周期和占空比有程序决定; —输出方式可以选择左对齐或中心对其; —可编程时钟选择逻辑,且可选频率范围很宽; ·SPI通信模块 —可选择8位或16位数据宽度;
—全双工或半双工通信方式; —收发双向缓冲; —主机或从机模式; —可选择最高有效为先输出或者最低有效位先输出; ·两个SCI串行通信接口 —全双工或半双工模式 ·输入输出端口 —多达91个通用I/O引脚,根据封装方式,有些引脚未被引出; —两个单输入引脚; ·封装形式 —112引脚薄型四边引线扁平封装(LQFP); —80引脚扁平封装(QFP); —64引脚LQFP封装; ·工作条件 —全功率模式下单电源供电范围3.15V到5V; —CPU总线频率最大为40MHz —工作温度范围–40 C到125 C 第十章模拟—数字转换 10.1 介绍 ADC12B16C是一个16通道,12位,复用方式输入逐次逼近模拟—数字转换器。 ATD的精度由电器规格决定。 10.1.1 特点 ·可设置8位、10位、12位精度 ·在停止模式下,ATD转换使用内部时钟 ·转换序列结束后自动进入低耗电模式 ·可编程采样时间 ·转化结果可选择左对齐或右对齐
2011飞思卡尔问题官方回答汇总(1)
所属赛区: 华南赛区 提问时间: 2010年11月16日 18:22:33 问题标题: A 车模问题 问题内容: 如老师所言,A 车模在承轴等一些小方面做了改动,那以前买的A 车模能不能用于参加第六届的比赛? 回 答: 可以。秘书处 队伍名称: 风之子 所属赛区: 华北赛区 提问时间: 2010年11月24日 20:38:55 问题标题: 去年车模 问题内容: 请问去年的B 型车模能参赛吗?能的话,能参加哪个组别的? 回 答: 去年B 型车模由于质量不稳定,今年已经取消该车莫,所以今年 不能参加比赛了。而规定使用新型的B 型车模。 队伍名称: 光电一队 所属赛区: 华东赛区 提问时间: 2010年12月03日 16:56:39 问题标题: 禁止使用D C -D C 升压电路直接为驱动电机以及舵机提供动力 问题内容: 规则的这句话是什么意思,舵机可不可以用开关稳压芯片供电? 谢谢。 回 答: 规定禁止使用D C -D C 升压电路为点电机和舵机供电指的是电机和 舵机的供电电压不得高于电池的电压(7.2V )。 舵机可以使用开 关降压稳压电路供电。 队伍名称: 追风队 所属赛区: 西部赛区 提问时间: 2010年12月03日 22:21:53 问题标题: C 车模 问题内容: 请问C 车模的电机的电压,电流等参数是多少啊?我们好准备。 谢谢! 回 答: C 型车模的电机(马达)参数如下: 额定工作电压:7.2V ,最大工作电压 9.6V 最大效率点: 电流:0.679A ,转速:13050p r m 最大功率点: 电流1.537A ,转速:8044 堵转电流:2.916A C 型车模马达到后轮的传动比为7.46
飞思卡尔--智能车舵机讲解
飞思卡尔--智能车舵机讲解
2.2 舵机的安装 完成了玩具车的拆卸之后要做的第二步就是安装舵机,现在市场上卖的玩具车虽然也具有转向 功能,但是前轮的转向多是依靠直流电机来驱动,无论向哪个方向转都是一下打到底,无法控制转 过固定的角度,因此根据我们的设计需求,需要将原有的转向部分替换成现有的舵机,以实现固定 转角的转向。舵机的实物图如图 2.1所示。 需要说明的是由于小车系玩具车改装,在安装舵机是需要合理的利用小车的结构,将舵机安装 牢固,同时还需注意合理利用购买舵机是附赠的齿轮,从而将舵机固定在合适的位置。舵机的安装 方式有俯式、卧式多种,不同的安装方法力臂长短、响应速度都有所不同,这一点请自己根据实际 情况合理选择,图 2.2 为舵机的安装图。 5
图 2.1 舵机实物图图 2.2 舵机安装图 舵机安装过程中有一点需要尤其注意,由于舵机不是360°可转的,因此必须保证车轮左右转 的极限在舵机的转角范围之内。 舵机安装完毕之后就可以对小车的转角进行控制了,但是由于玩具车的车体设计往往限制了小 车的转角,因此可以对小车进行局部的“破坏”来增大前轮的转角,要知道在比赛中追求速度的同 时一个大的转角对小车的可控性会有一个很大的提升,如图2.3 所示,就是对增加小车转角的一个 改造,这是我在去年小车比赛中的用法。将阻碍前轮转角的一部分用烙铁直接烫掉。 但是这种做法也有风险,由于你的改造会破坏小车的整体 7
结构,有可能会对小车的硬件结构造 成破坏,因此如果你的小车在改造之后显得过于脆弱的话那你就要对你的小车采取些加固措施了。 3.4 舵机转向模块设计 舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特 点,无论是在硬件还是软件舵机设计是小车控制部分的重要组成部分,舵机的主要工作流程 为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。图 3.11 为舵机的实物图。 7
第二届全国大学生“飞思卡尔杯”智能汽车竞赛背景介绍概要
第二届全国大学生“飞思卡尔杯”智能汽车竞赛 背景介绍 全国大学生智能汽车竞赛于2005年11月正式启动,去年的第一届“飞思卡尔杯”全国大学生智能汽车邀请赛共有来自全国59所大学的112支队伍参加。今年,第二届全国大学生“飞思卡尔杯”智能汽车竞赛将规模扩大到全国超过100所院校,参赛队将近240支,并在全国分成五个赛区进行预赛,各区按照参赛队数量根据一定比例选拔出共76支队参加8月底在上海交通大学进行的全国总决赛。比赛将决出特等奖、一等奖和二等奖等奖项若干名。 该项竞赛是教育部为了加强大学生实践、创新能力和团队精神的培养而设立的。旨在进一步深化高等工程教育改革,培养本科生获取知识、应用知识的能力及创新意识;培养硕士生从事科学和技术研究能力,知识和技术创新能力。 全国大学生智能汽车竞赛与已在全国举办的数学建模、电子设计、机械设计、结构设计等专业竞赛不同,是以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的科技创意性比赛。教育部委托高等学校自动化专业教学指导分委员会主办每年一度的全国大学生智能汽车竞赛;高等学校自动专业教学指导分委员会决定飞思卡尔半导体公司为协办单位,赛事冠名为“飞思卡尔杯”。第二届“飞思卡尔杯”全国大学生智能汽车竞赛分赛区和决赛的承办院校从自愿报名的院校中竞争选拔产生。 竞赛组委会成员 “飞思卡尔杯”全国大学生智能汽车竞赛组织委员会由高等学校自动化专业教学指导分委员会主任委员吴澄院士任主任委员,教育部高等教育司张尧学司长、飞思卡尔高级副总裁兼汽车与标准产品部总经理Paul Grimme先生、飞思卡尔高级副总裁兼亚太区主席姚天丛先生、清华大学副校长汪劲松教授、高等学校自动化专业教学指导分委员会副主任委员申功璋教授任副主任委员。 参赛队组成
飞思卡尔单片机寄存器及汇编指令详解
附录I:寄存器地址列表 直接页面寄存器总结
高页面寄存器总结
非易失寄存器总结 注:直接页面寄存器表地址的低字节用粗体显示,直接寻址对其访问时,仅写地址低字节即可。第2列中寄存器名用粗体显示以区别右边的位名。有0的单元格表示未用到的位总是读为0,有破折号的单元格表示未用或者保留,对其读不定。
附录II 指令接与寻址方式 HCS08指令集概括 运算符 () = 括号种表示寄存器或存储器位置的内容 ← = 用……加载(读: “得到”) & = 布尔与 | = 布尔或 ⊕= 布尔异或 ×= 乘 ÷ = 除 : = 串联 + = 加 - = 求反(二进制补码) CPU registers A =>累加器 CCR =>条件代码寄存器 H =>索引寄存器,高8位 X => 索引寄存器,低8位 PC =>程序计数器 PCH =>程序计数器,高8位 PCL =>程序计数器,低8位 SP =>堆栈指针 存储器和寻址 M =>一个存储区位置或者绝对值数据,视寻址模式而定 M:M + 0x0001 => 两个连续存储位置的16位值.高8位位于M的地址,低8位位于更高的连续地址. 条件代码寄存器(CCR)位 V => 二进制补码溢出指示,第7位 H => 半进位,第4位 I => 中断屏蔽,第 3位 N => 求反指示器, 第2位 Z => 置零指示器, 第1位 C => 进/借, 第0位 (进位第 7位 ) CCR工作性符号 – => 位不受影响 0 = > 位强制为0 1 = > 位强制为1
= >根据运算结果设置或清除位 U = > 运算后没有定义 机器编码符号 dd =>一个直接寻址0x0000–0x00FF的低8位(高字节假设为0x00) ee => 16位偏移量的高8位 ff => 16位偏移量的低8位 ii => 立即数的一个字节 jj => 16位立即数值的高位字节 kk => 16位立即数值的低位字节 hh => 16位扩展寻址的高位字节 ll => 16位扩展寻址的低位字节 rr => 相对偏移量 n —任何表达范围在0–7之间的一个有符号数的标号或表达式 opr8i —任何一个表达8位立即值的标号或表达式 opr16 —任何一个表达16位立即值的标号或表达式 opr8a —任何一个表达一个8位值的标号或表达式.指令对待这个8位值为直接页面64K 字节地址空间(0x00xx)中地址的低8位. opr16a —任何一个表达16位值的标号或表达式.指令对待这个值为直接页面64K字节地址空间. oprx8 —任何一个表达8位无符号值的标号或表达式,用于索引寻址. oprx16 —任何一个16位值的标号或表达式.因为HCS08有一个16位地址总线,这可以为一个有符号或者无符号值. rel —任何指引在当前指令目标代码最后一个字节之后–128 to +127个字节之内的标号或表达式.汇编器会计算包括当前指令目标代码在内的8位有符号偏移量. 寻址方式 隐含寻址(Inherent)如CLRA,只有操作码,无操作数,需要操作的数据一般为CPU寄存器,因此不需要再去找操作数了。(INH) 立即寻址 (Immediate)如LDA #$0A,“$”表示16进制,此时操作数位于FLASH空间,与程序一起存放。(IMM) 直接寻址 (Direct)如 LDA $88,只能访问$0000-$00FF的存储器空间,指令短速度快; (DIR) 扩展寻址 (Extended)如果操作数地址超出了$00FF,自动为扩展寻址;(EXT) 相对寻址(Relative)如BRA LOOP,指令中一般给出8位有符号数表示的偏移量。(REL) 变址寻址 (Indexed) 采用[H:X]或SP作为指针的间接寻址方式。( IX )( IX1 )( IX2 ) 变址寻址 (Indexed) 1〉无偏移量:CLR ,X 简写(IX) 2〉无偏移量,指令完成后指针加1(H:X = H:X + 0x0001) ,简写(IX+)只用于指令MOV和CBEQ指令中;
外文翻译----- Freescale单片机在汽车控制中的应用
附录A 原文: FreescaleSingle-chip Microcomputer 's in automobile control application Freescale has the rich micro processing unit (MCU), but widely uses in the automobile electrically controlled engine, the automobile body, the crew member safety, the vehicle door and the chair, the glass, ventilation and air conditioning, skylightand light control, automobile local area network's gateway, communication facility, global positioning system and in other automobile control unit. Its product mainly includes 8/16 bit micro controller (including HC08/HCS08, HC12/HCS12 and so on), 32 bit micro controllers (including PowerPC, ColdFire, ARM and so on) 1. 8 bit Single-chip Microcomputer MC68HC11F1 and application 1.1 Characteristicsof MC68HC11F1 8 bit micro controllerMC68HC11F1 is high performance flash memory technology low cost chip based on the CPU of 8 bit HC08 the CPU . Its dozens of kind of different specification's product may cause the user to make a choice conveniently, the superior price performance ratio may cause the cost of the automobile electronic products to be more inexpensive. Chief feature of MC68HC11F1 : Two kind of power saving mode, stop and waiting; working normal in 3.0-5.0V voltage ; 0, 256b, 512b or 768b in on-chip RAM, Data of RAM will be retained in standby; 0, 12kb or 20kb inon-chip RAM or EPROM; Serical Communication InterfaceSCI,8 channel, 8 bit A/D transducer ; 16 bit timer systems; 8 bit pulse accumulators, real-time interrupt electric circuit and so on. 1.2 MC68HC11F1is employed inin automobile electronic control system Since Marelli simple point electronic fuel injectionn engine management system is promoted based on MC68HC11F1,our country Shenyang gold cup sea lion passenger car , the gold cup China passenger vehicle, AnhuiChery passenger vehicle, the Tianjin Xiali passenger vehicle and so on has used this kind of engine management system . Below to take gold cup simple point Marelli logic circuit for an example, I introducesMC68HC11F1 employed inin automobile electronic control system. 1.2.1 Compositions of system As shown in Figure 1, gold cup simple point Marelli logic circuit is mainly composed of the below part: 1.Electric circuit's control core MC68HC11F1 (CPU), is Freescale 8 bit MCU of automobile special-purpose ; 2.Tristate bus driver 74HC244 with enable, is the switch of status information input for air conditioning, oil pump, EVAP solenoid valve, idling motor and so on ; 3.8 groups rises along D trigger74HC273 with reset , isdriving signaltake-off valves for idling motor, host relay, trouble lamp, air conditioning relay power and so on;
基于飞思卡尔单片机的智能汽车设计毕业设计(论文)
基于飞思卡尔单片机的智能汽车设计 摘要 本智能车系统设计以 MC9S12DG128B 微控制器为核心,通过一个CMOS 摄像头检测模型车的运动位置和运动方向,使用LM1881视频分离芯片对图像进行处理,用光电传感器检测模型车的速度并使用PID 控制算法调节驱动电机的转速和舵机的方向,完成对模型车运动速度和运动方向的闭环控制。为了提高智能车的行驶速度和可靠性,采用了自制的电路板,在性能和重量上有了更大的优势,对比了各种方案的优缺点。实验结果表明,系统设计方案可行 关键词:MC9S12DG128,CMOS 摄像头,PID
The Research of Small and Medium-sized Electric Machines in Fuan City Author:Yao fang Tutor:Ma shuhua Abstract Fujian Fuan City industry of electric motor and electrical equipment is the one of the most representative phenomenon of industry cluster in Fujian Province mechanical industry. Its output value of small and medium-sized electric machines accounts for 20% of the whole province’s electrical equipment indu stry. The output amount of small and medium-sized electric machines from this region takes up 1/3 of that of the whole nation. Fuan electric motor and electrical equipment industry plays a significant role in the development of local national economy, being considered to be the main growth point of local economy and called "the Chinese electric motor and electrical equipment city ". This paper launched a research on small and medium- sized electric machines in Fuan city from two angles. The first one inferred the situation of Fuan electric machine industrial cluster as well as the analysis of the temporary existed problems, and then propose a few of suggestions on the part of local government. The second part focus on the improvement of the competitiveness of Fuan electric machine enterprises, through the application of Michael Porter's Five Forces Model into the local industry of electric machine, consequently carried out some strategies local enterprises should take. Key Words: small and medium-sized electric machines, Five Forces Model, industrial cluster
飞思卡尔S12系列寄存器和中断讲解
S12的输入/输入端口(I/O口) I/O端口功能 可设置为通用I/O口、驱动、内部上拉/下拉、中断输入等功能。 设置I/O口工作方式的寄存器有: DDR、IO、RDR、PE、IE和PS。 DDR:设定I/O口的数据方向。 IO :设定输出电平的高低。 RDR:选择I/O口的驱动能力。 PE:选择上拉/下拉。 IE:允许或禁止端口中断。 PS:1、中断允许位置位时,选择上升沿/下降沿触发中断;2、中断禁止时且PE有效时,用于选择上拉还是下拉。 I/O端口设置 1、A口、B口、E口寄存器 (1)数据方向寄存器DDRA、DDRB、DDRE DDRA、DDRB、DDRE均为8位寄存器,复位后其值均为0。 当DDRA=0、DDRB=0、DDRE=0 时A口、B口和E口均为输入口。 否则,A口、B口、E口为输出口。当DDRA、DDRB、DDRE的任何一 位置1时,则该位对应的引脚被设置为输出。 例如,将A口设置为输出口,则其C语言程序的语句为:DDRA=0xff;(2)A口、B口、E口上拉控制寄存器PUCR PUCR为8位寄存器,复位后的值为0。当PUPAE、PUPBE、PUPEE被设置为1时,A口、B口、E口具有内部上拉功能;为0时,上拉无效。当A口、B口、E口为地址/数据总线时,PUPAE和PUPBE无效。 (3)A口、B口、E口降功率驱动控制寄存器RDRIV RDRIV为8位寄存器,复位后的值为0,此时,A口、B口、E口驱动保持全功率;当RDPA、RDPB、RDPE为1时,A口、B口、E口输出引脚的驱动功率下降 (4)数据寄存器PORTA、PORTB、PORTE PORTA、PORTB、PORTE均为8位寄存器,复位后的值为0,端口引脚输出低电平;要使引脚输出高电平,相应端口对应位应该置1。 由于PE0是/XIRQ、PE1是IRQ,因此,PE0和PE1只能设置为输入。
飞思卡尔智能车竞赛策略和比赛方案综述
飞思卡尔智能车竞赛策略和比赛方案综述 一、竞赛简介 起源: “飞思卡尔杯”智能车大赛起源于韩国,是韩国汉阳大学汽车控制实验室在飞思卡尔半导体公司资助下举办的以HCSl2单片机为核心的大学生课外科技竞赛。组委会提供一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路径的智能车,在专门设计的跑道上自动识别道路行驶,谁最快跑完全程而没有冲出跑道并且技术报告评分较高,谁就是获胜者。其设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械、能源等多个学科的知识,对学生的知识融合和实践动手能力的培养,具有良好的推动作用。 全国大学生“飞思卡尔”杯智能汽车竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。因而该竞赛是涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的比赛。 该竞赛以飞思卡尔半导体公司为协办方,自2006年首届举办以来,成功举办了五届,得到了教育部吴启迪副部长、张尧学司长及理工处领导、飞思卡尔公司领导与各高校师生的高度评价,已发展成全国30个省市自治区200余所高校广泛参与的全国大学生智能汽车竞赛。2008年第三届被教育部批准列入国家教学质量与教学改革工程资助项目中9个科技人文竞赛之一(教高函[2007]30号文,附件2),2009年第四届被邀申请列入国家教学质量与教学改革工程资助项目。 分赛区、决赛区比赛规则 在分赛区、决赛区进行现场比赛规则相同,都分为初赛与决赛两个阶段。在计算比赛成绩时,分赛区只是通过比赛单圈最短时间进行评比。决赛区比赛时,还需结合技术报告分数综合评定。 1.初赛与决赛规则 1)初赛规则 比赛场中有两个相同的赛道。 参赛队通过抽签平均分为两组,并以抽签形式决定组内比赛次序。比赛分为两轮,两组同时在两个赛道上进行比赛,一轮比赛完毕后,两组交换场地,再进行第二轮比赛。在每轮比赛中,每辆赛车在赛道上连续跑两圈,以计时起始线为计时点,以用时短的一圈计单轮成绩;每辆赛车以在两个单轮成绩中的较好成绩为赛车成绩;计时由电子计时器完成并实时在屏幕显示。 从两组比赛队中,选取成绩最好的25支队晋级决赛。技术评判组将对全部晋级的赛车进行现场技术检查,如有违反器材限制规定的(指本规则之第一条)当时取消决赛资格,由后备首名晋级代替;由裁判组申报组委会执委会批准公布决赛名单。 初赛结束后,车模放置在规定区域,由组委会暂时保管。
飞思卡尔智能车比赛个人经验总结
先静下心来看几篇技术报告,可以是几个人一起看,边看边讨论,大致了解智能车制作的过程及所要完成的任务。 看完报告之后,对智能车也有了大概的了解,其实总结起来,要完成的任务也很简单,即输入模块——控制——输出。 (1)输入模块:各种传感器(光电,电磁,摄像头),原理不同,但功能都一样,都是用来采集赛道的信息。这里面就包含各种传感器的原理,选用,传感器电路的连接,还有传感器的安装、传感器的抗干扰等等需要大家去解决的问题。 (2)控制模块:传感器得到了我们想要的信息,进行相应的AD转换后,就把它输入到单片机中,单片机负责对信息的处理,如除噪,筛选合适的点等等,然后对不同的赛道信息做出相应的控制,这也是智能车制作过程中最为艰难的过程,要想出一个可行而又高效的算法,确实不是一件容易的事。这里面就涉及到单片机的知识、C语言知识和一定的控制算法,有时为了更直观地动态控制,还得加入串口发送和接收程序等等。 (3)输出模块:好的算法,只有通过实验证明才能算是真正的好算法。经过分析控制,单片机做出了相应的判断,就得把控制信号输出给电机(控制速度)和舵机(控制方向),所以就得对电机和舵机模块进行学习和掌握,还有实现精确有效地控制,又得加入闭环控制,PID算法。 明确了任务后,也有了较为清晰的控制思路,接下来就着手弄懂每一个模块。虽然看似简单,但实现起来非常得不容易,这里面要求掌握电路的知识,基本的机械硬件结构知识和单片机、编程等计算机知识。最最困难的是,在做的过程中会遇到很多想得到以及想不到的事情发生,一定得细心地发现问题,并想办法解决这些问题。 兴趣是首要的,除此之外,一定要花充足的时间和精力在上面,毕竟,有付出就会有收获,最后要明确分工和规划好进度。
第四届全国大学生“飞思卡尔”杯智能汽车竞赛
比赛规则与赛场纪律 参赛选手须使用竞赛秘书处统一指定并负责采购竞赛车模套件,采用飞思卡尔半导体公司的8位、16位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、动力电机驱动、转向舵机控制以及控制算法软件开发等,完成智能车工程制作及调试,于指定日期与地点参加各分赛区的场地比赛,在获得决赛资格后,参加全国决赛区的场地比赛。参赛队伍之名次(成绩)由赛车现场成功完成赛道比赛时间为主,技术报告、制作工程质量评分为辅来决定。大赛分为光电与摄像头两个赛题组,在车模中使用透镜成像进行道路检测方法属于摄像头赛题组,除此之外则属于光电赛题组。 竞赛秘书处制定如下比赛规则适用于各分赛区预赛以及全国总决赛。在实际可操作性基础上力求公正与公平参与。秘书处将邀请独立公证人监督现场赛事及评判过程。 一、器材限制规定 1. 须采用统一指定的车模,细节及改动限制见附件一; 2. 须采用飞思卡尔半导体公司的 8 位、 16 位处理器 ( 单核 ) 作为唯一的微控制器,推荐使用 9S12XS128 , 9S08AW60 微控制器。有关细节及其它电子器件使用的限制见附件二; 3. 参加光电赛题组中不允许传感器获取道路图像信息进行路径检测,参加摄像头赛题组可以使用光电管作为辅助检测手段. 其他事项 ?如果损毁车模中禁止改动的部件,需要使用相同型号的部件替换; ?车模改装完毕后,尺寸不能超过:250mm 宽和400mm长。 二、有关赛场的规定 1. 赛道基本参数(不包括拐弯点数、位置以及整体布局)见附件三; 2. 比赛赛道实际布局将在比赛当日揭示,在赛场内将安排采用制作实际赛道的材料所做的测试赛道供参赛队进行现场调试; 三、裁判及技术评判 竞赛分为分赛区和全国总决赛两个阶段。其中全国总决赛阶段是在竞赛组委会和秘书处指导下,由决赛承办学校成立竞赛执行委员会,下辖技术租、裁判组和仲裁委员会,统一处理竞赛过程中遇到的各类问题。 所有竞赛组织委员会工作人员,包括技术评判组及现场裁判组人员均不得参与任何针对个别参赛队的指导或辅导工作(提供微控制器培训除外),不得泄
飞思卡尔智能车程序
Main.c #include
飞思卡尔错误Symbol _FMUL--1822解决方法
这是飞思卡尔 XS128平台比较常见的LINK错误。 但是要解决起来也比较头疼。 很多人也许有这样的经历,整个工程目录是在别人做过的所有文件拷贝过来然后修改代码符合自己项目要求而产生的。这就发生了一个问题, 当初新建工程时的很多配置,比如预处理器配置,就会出现不适用当前项目。比如,本文所要提到的链接错误。 这个错误发生于: 原工程在新建的时候在某一步有与float相关的三个选项,如图: 如果你选择了none,那么不幸的是,如果在代码中加入关于float的四则运算等代码,就会出现该链接错误。 然而,新建一个带float的工程然后把代码文件都添加进去是不是就能解决该链接错误呢?答案是不一定的。 笔者做了一个测试,发现在Make的时候会死机,整个IDE就卡在这儿了。 当然,也不一定会出现这种情况,原因还是在原先的工程配置你并不清楚什么样的,或者其它原因也说不定.
那么,该如何解决LINK错误并通过编译呢? 先看下飞思卡尔官方的解释: Basically for HC12 you have to remove the option -D__NO_FLOAT__ from compile r command line and add floating point format option (if needed) then replace ansi libr ary file. To retrieve the appropriate ansi library file check the file readme.txt from {Install}\lib \hc12c. 按照提示,第一步 将编译器命令进行修改: 按第二个按钮进入标准设置。 然后在命令行参数设置框里将-D__NO_FLOAT__命令删除: