滤波反投影图像重建算法分析及MATLAB现实
图像重建是CT技术的一个研究热点。重建算法的现实是对算法研究的一个重要环节。由Math Works公司推出的MATLAB工具软件具有强大的数学计算和图像处理功能,并为算法提供了
一个方便有效的研究和实现的平台。本文在图像重建分析的基础上,运用MATLAB实现了基于扇
束的滤波反投影重建算法的计算机模拟。
引言
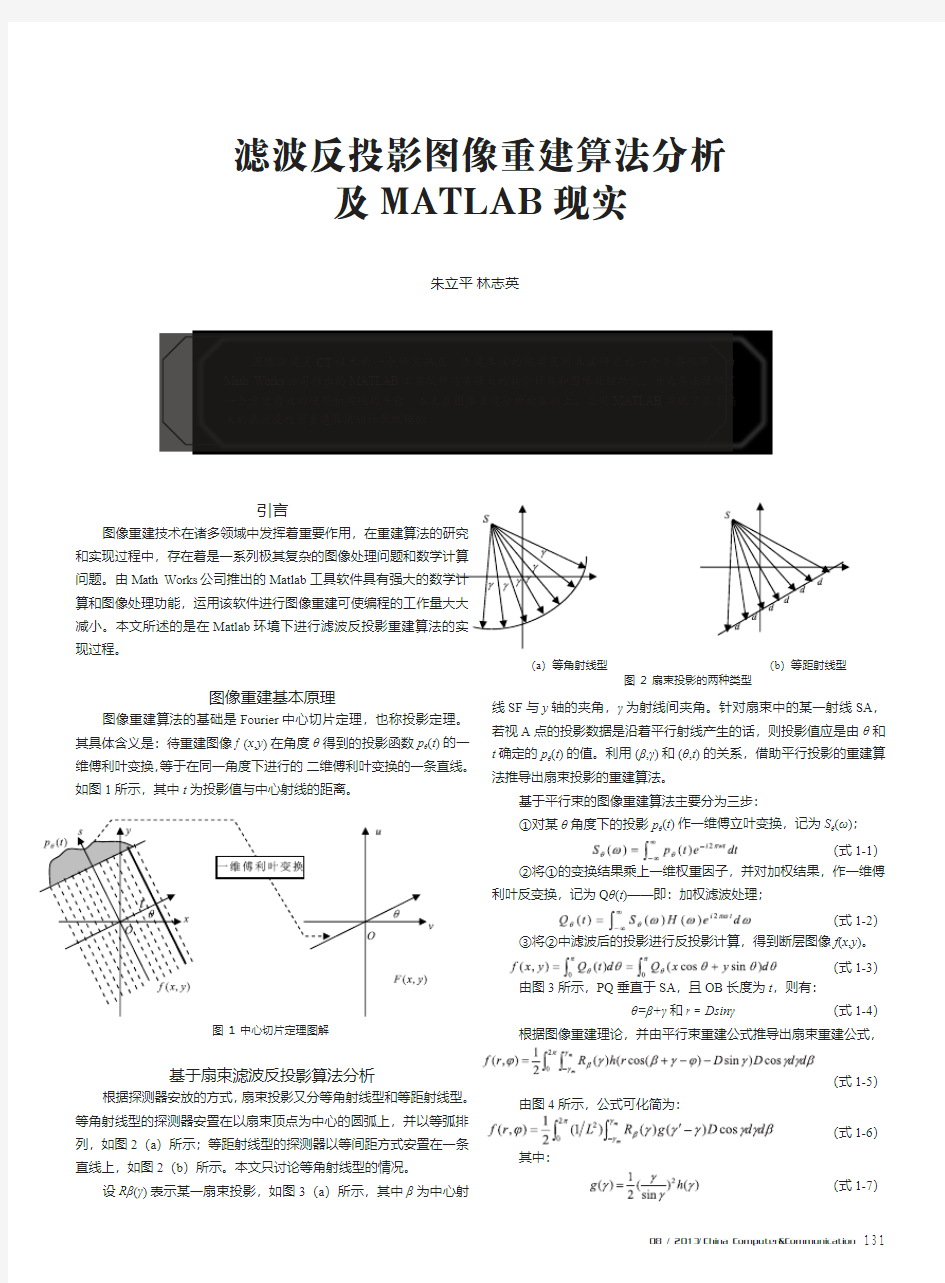
图像重建技术在诸多领域中发挥着重要作用,在重建算法的研究
和实现过程中,存在着是一系列极其复杂的图像处理问题和数学计算
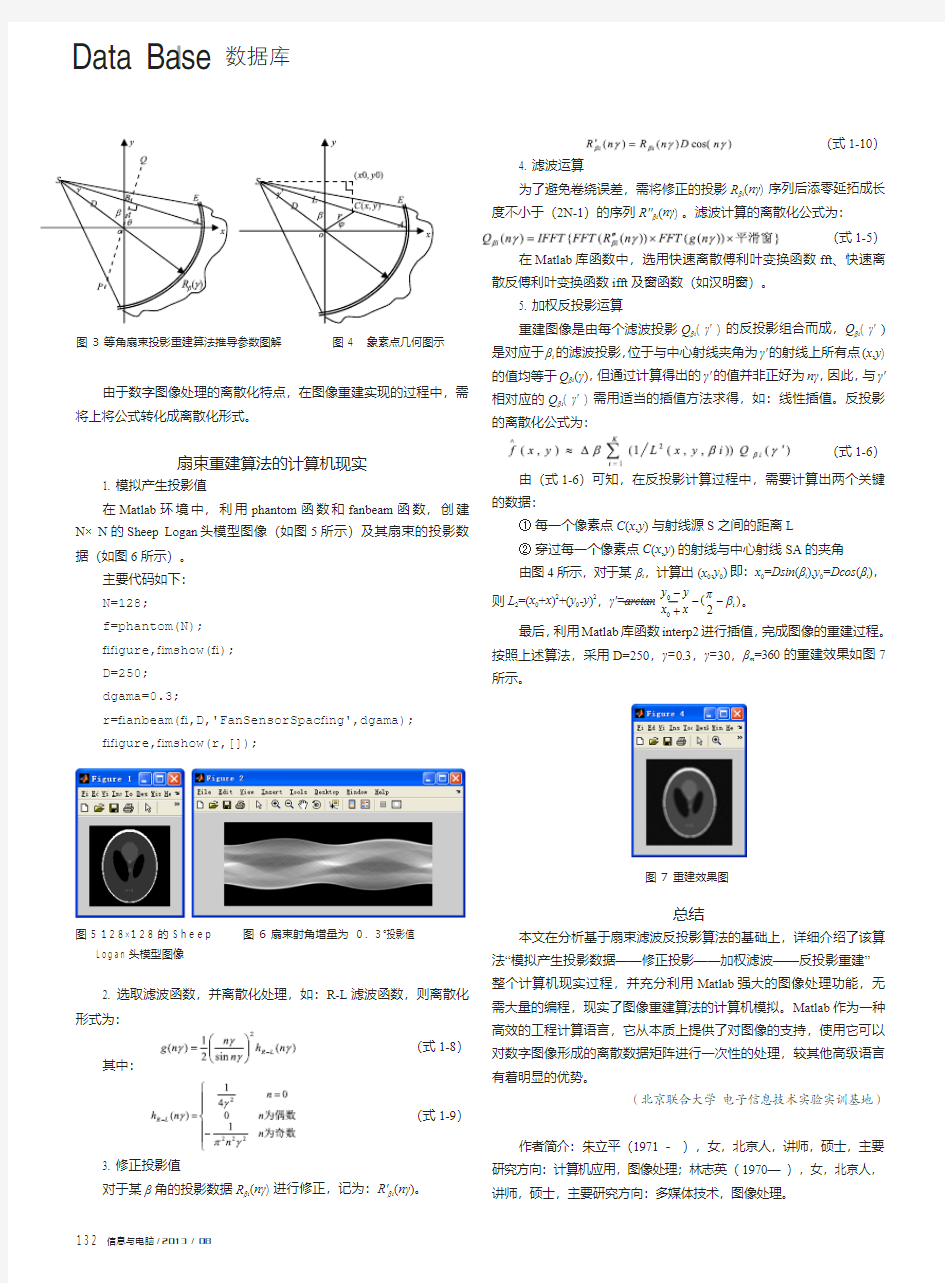
图5 128×128的Sheep
Logan头模型图像
图6 扇束射角增量为0.3°投影值
2. 选取滤波函数,并离散化处理,如:R-L滤波函数,则离散化形式为:
(式1-8)其中:
(式1-9)
图7 重建效果图
总结
本文在分析基于扇束滤波反投影算法的基础上,详细介绍了该算法“模拟产生投影数据——修正投影——加权滤波——反投影重建”整个计算机现实过程,并充分利用Matlab强大的图像处理功能,无需大量的编程,现实了图像重建算法的计算机模拟。
高效的工程计算语言,它从本质上提供了对图像的支持,使用它可以对数字图像形成的离散数据矩阵进行一次性的处理,较其他高级语言
卡尔曼滤波算法与matlab实现
一个应用实例详解卡尔曼滤波及其算法实现 标签:算法filtermatlabalgorithm优化工作 2012-05-14 10:48 75511人阅读评论(25) 收藏举报分类: 数据结构及其算法(4) 为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。 在介绍他的5条公式之前,先让我们来根据下面的例子一步一步的探索。 假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就是下一分钟的温度等于现在这一分钟的温度(假设我们用一分钟来做时间单位)。假设你对你的经验不是100%的相信,可能会有上下偏差几度。 我们把这些偏差看成是高斯白噪声(White Gaussian Noise),也就是这些偏差跟前后时间是没有关系的而且符合高斯分配(Gaussian Distribution)。另外,我们在房间里放一个温度计,但是这个温度计也不准确的,测量值会比实际值偏差。我们也把这些偏差看成是高斯白噪声。 好了,现在对于某一分钟我们有两个有关于该房间的温度值:你根据经验的预测值(系统的预测值)和温度计的值(测量值)。下面我们要用这两个值结合他们各自的噪声来估算出房间的实际温度值。 假如我们要估算k时刻的是实际温度值。首先你要根据k-1时刻的温度值,来预测k时刻的温度。因为你相信温度是恒定的,所以你会得到k时刻的温度预测值是跟k-1时刻一样的,假设是23度,同时该值的高斯噪声的偏差是5度(5是这样得到的:如果k-1时刻估算出的最优温度值的偏差是3,你对自己预测的不确定度是4度,他们平方相加再开方,就是5)。然后,你从温度计那里得到了k时刻的温度值,假设是25度,同时该值的偏差是4度。 由于我们用于估算k时刻的实际温度有两个温度值,分别是23 度和25度。究竟实际温度是多少呢?相信自己还是相信温度计呢?究竟相信谁多一点,我们可以用他们的covariance(协方差)来判断。因为Kg^2=5^2/(5^2+4^2),所以Kg=0.78,我们可以估算出k时刻的实际温度值是:23+0.78*(25-23)=24.56度。 可以看出,因为温度计的covariance比较小(比较相信温度计),所以估算出的最优温度值偏向温度计的值。 现在我们已经得到k时刻的最优温度值了,下一步就是要进入k+1时刻,进行新的最优估算。到现在为止,好像还没看到什么自回归的东西出现。对了,在进入k+1时刻之前,我们还要算出k时刻那个最优值(24.56 度)的偏差。算法如下:((1-Kg)*5^2)^0.5=2.35。这里的5就是上面的k时刻你预测的那个23度
采用差分滤波算法改进最大投影差值故障选线
第46卷 第4期 电力系统保护与控制 V ol.46 No.4 2018年2月16日 Power System Protection and Control Feb. 16, 2018 DOI: 10.7667/PSPC170139 采用差分滤波算法改进最大投影差值故障选线 杨正理,黄其新,王长鹏,王 欣 (三江学院,江苏 南京 210012) 摘要:为了提高最大投影差值()sin (?I ?)方法在故障选线中的可靠性和运算速度,在分析了最大投影差值方法和差分滤波算法的原理后,提出了采用差分滤波算法改进最大投影差值进行故障选线的新方法。利用差分滤波算法对最大投影差值方法进行优化,优化后算法避免了引入中间参考正弦信号并减少了乘法运算量,可靠性和运算速度都得到了提高。理论分析和大量仿真结果表明,新算法不受故障角、过渡电阻、故障位置和电弧接地等参数的影响,故障选线正确率能达到100%。 关键词:小电流接地系统;差分滤波算法;最大投影差值优化;单相接地故障;故障选线 A new fault line selection method of the maximizing shadow difference optimized by differential filter algorithm YANG Zhengli, HUANG Qixin, WANG Changpeng, WANG Xin (Sanjiang University, Nanjing 210012, China) Abstract: In order to improve the reliability and calculating speed of the maximizing shadow difference ()sin (?I ?) method in fault line selection, the principles of the maximizing shadow difference method and the differential filter algorithm are analyzed in detail, and a new fault line selection method of the maximizing shadow difference optimized by differential filter algorithm is proposed. The maximizing shadow difference method is optimized by differential filter algorithm. The optimized method avoids the intermediate referenced sine signal and reduces the multiplication calculation, which improves both the reliability and calculating speed. Theoretical analysis and simulation results show that the new method is immune to the parameters, such as the fault angle, transition resistance, fault distance, fault arc, and so on. The fault line selection accuracy rate can reach to 100%. This work is supported by Natural Science Foundation of Jiangsu Universities (No. 15KJD510006). Key words: networks with un-ground neutral; differential filter algorithm; the maximizing shadow difference optimized; single-phase ground fault; fault line selection 0 引言 我国小电流接地系统中进行故障选线的方法很多[1-6] , 最大投影差值()sin (?I ?)方法因其能够在架空/电缆出线的有/无消弧线圈的各种电力系统中应用[7],能够克服电流互感器(Current Transformer, CT)不平衡电流所产生的不利影响,具有灵敏性高和应用范围广的优势,因而在各种类型的微机继电保护装置中得到广泛应用。但是,最大)sin (?I ?法具有两个较大缺点:1) 该方法需要从电压互感器(Potential Transformer, PT)二次侧引入一个正弦电压 基金项目:江苏高校自然科学研究面上项目(15KJD510006) 作为参考信号,当变电所所用交流电失压或PT 二次侧发生断线时,参考信号丢失,该方法不能正常实现,可靠性降低;2) 需要对电压和电流的相位差进行多次求取,并需要对信号进行多次投影处理,这就引入了较多的乘法运算,使该方法的运算量加大,延迟时间增长。 针对上述缺点,在分析了最大投影差值方法和差分滤波算法的原理后,提出了采用差分滤波算法改进最大投影差值进行故障选线的新方法。一方面不再需要从PT 二次侧引入正弦电压信号,较大程度地提高新方法的可靠性;另一方面,新方法减少了求取电压和电流相位差的次数,并避免了多次对信号进行投影的过程,使新方法的乘法运算量减少, 万方数据
卡尔曼滤波入门简介及其算法MATLAB实现代码
卡尔曼滤波入门: 卡尔曼滤波是用来进行数据滤波用的,就是把含噪声的数据进行处理之后得出相对真值。卡尔曼滤波也可进行系统辨识。 卡尔曼滤波是一种基于统计学理论的算法,可以用来对含噪声数据进行在线处理,对噪声有特殊要求,也可以通过状态变量的增广形式实现系统辨识。 用上一个状态和当前状态的测量值来估计当前状态,这是因为上一个状态估计此时状态时会有误差,而测量的当前状态时也有一个测量误差,所以要根据这两个误差重新估计一个最接近真实状态的值。 信号处理的实际问题,常常是要解决在噪声中提取信号的问题,因此,我们需要寻找一种所谓有最佳线性过滤特性的滤波器。这种滤波器当信号与噪声同时输入时,在输出端能将信号尽可能精确地重现出来,而噪声却受到最大抑制。 维纳(Wiener)滤波与卡尔曼(Kalman)滤波就是用来解决这样一类从噪声中提取信号问题的一种过滤(或滤波)方法。 (1)过滤或滤波 - 从当前的和过去的观察值x(n),x(n-1),x(n-2),…估计当前的信号值称为过滤或滤波; (2)预测或外推 - 从过去的观察值,估计当前的或将来的信号值称为预测或外推; (3)平滑或内插 - 从过去的观察值,估计过去的信号值称为平滑或内插; 因此,维纳过滤与卡尔曼过滤又常常被称为最佳线性过滤与预测或线性最优估计。这里所谓“最佳”与“最优”是以最小均方误差为准则的。 维纳过滤与卡尔曼过滤都是解决最佳线性过滤和预测问题,并且都是以均方误差最小为准则的。因此在平稳条件下,它们所得到的稳态结果是一致的。然而,它们解决的方法有很大区别。 维纳过滤是根据全部过去的和当前的观察数据来估计信号的当前值,它的解是以均方误差最小条件下所得到的系统的传递函数H(z)或单位样本响应h(n)的形式给出的,因此更常称这种系统为最佳线性过滤器或滤波器。 而卡尔曼过滤是用前一个估计值和最近一个观察数据(它不需要全部过去的观察数据)来估计信号的当前值,它是用状态方程和递推的方法进行估计的,它的解是以估计值(常常是状态变量值)形式给出的。因此更常称这种系统为线性最优估计器或滤波器。 维纳滤波器只适用于平稳随机过程,而卡尔曼滤波器却没有这个限制。维纳过滤中信号和噪声是用相关函数表示的,因此设计维纳滤波器要求已知信号和噪声的相关函数。 卡尔曼过滤中信号和噪声是状态方程和量测方程表示的,因此设计卡尔曼滤波器要求已知状态方程和量测方程(当然,相关函数与状态方程和量测方程之间会存在一定的关系。卡尔曼过滤方法看来似乎比维纳过滤方法优越,它用递推法计算,不需要知道全部过去的数据,从而运用计算机计算方便,而且它可用于平稳和不平稳的随机过程(信号),非时变和时变的系统。 但从发展历史上来看维纳过滤的思想是40年代初提出来的,1949年正式以书的形式出版。卡尔曼过滤到60年代初才提出来,它是在维纳过滤的基础上发展起来的,虽然如上所述它比维纳过滤方法有不少优越的地方,但是最佳线性过滤问题是由维纳过滤首先解决的,维纳过滤的物理概念比较清楚,也可以认为卡尔曼滤波仅仅是对最佳线性过滤问题提出的一种新的算法。 卡尔曼滤波在数学上是一种统计估算方法,通过处理一系列带有误差的实际量测数据而得到的物理参数的最佳估算。例如在气象应用上,根据滤波的基本思想,利用前一时刻预报误差的反馈信息及时修正预报方程,以提高下一时刻预报精度。作温度预报一般只需要连续两个月的资料即可建立方程和递推关系。
CT反投影滤波重建算法设计(汇编)
地理与生物信息学院 2011 / 2012 学年第二学期 实验报告 课程名称:医学图像处理和成像技术实验名称:CT反投影滤波重建算法设计 班级学号: B090903** 学生姓名: **** 指导教师: **** 日期:2012 年 4 月
一、实验题目:CT反投影滤波重建算法设计 二、实验内容: 1.显示图像; 2.获得仿真投影数据; 3.基于获得的仿真投影数据重建图像。 三、实验要求: 1.画出Shepp-Logan头模型,显示尺寸为128×128; 2.从头模型中获得投影数据,投影数据格式为180×185; 3.基于获得的仿真投影数据重建图像,使用R-L卷积函数,重建 尺寸为128×128。 四、实验过程: 1.显示图像: ①算法实现流程: I. S-L头模型由10个位置、大小、方向、密度各异的椭圆组成, 象征一个脑断层图像。将模型中的椭圆参数写入一个p矩阵中,方便使用其中的数据,并设定所需参数。 II. 使用循环语句给像素赋值: for i=1:10 for x…. for y….. 判断点(x, y)是否在第i个椭圆内;
如是,则将第i个椭圆折射指数赋给点(x, y); end end end III. 显示仿真头模型,使用imshow(f,[])函数显示出图像。 ②实验代码: clear all; p=[0 0 0.92 0.69 pi/2 1 0 -0.0184 0.874 0.6624 pi/2 2 0.22 0 0.31 0.11 72/180*pi 0 -0.22 0 0.41 0.16 108/180*pi 4 0 0.35 0.25 0.21 pi/2 5 0 0.1 0.046 0.046 0 6 0 -0.1 0.046 0.046 0 7 -0.08 -0.605 0.046 0.023 0 8 0 -0.605 0.023 0.023 0 8 0.06 -0.605 0.046 0.023 pi/2 8]; N=256; x=linspace(-1,1,N); y=linspace(-1,1,N); f=zeros(N,N); for i=1:N for j=1:N for k=1:10 A=p(k,3); B=p(k,4); x0=p(k,1); y0=p(k,2); x1=(x(i)-x0)*cos(p(k,5))+(y(j)-y0)*sin(p(k,5)); y1=-(x(i)-x0)*sin(p(k,5))+(y(j)-y0)*cos(p(k,5)); if((x1*x1)/(A*A)+(y1*y1)/(B*B)<=1) %判断条件 f(i,j)=p(k,6); end end end end f=rot90(f); imshow(f,[])
卡尔曼滤波器及其简matlab仿真
卡尔曼滤波器及其简matlab仿真
卡尔曼滤波器及其简matlab仿真 一、卡尔曼滤波的起源 谈到信号的分析与处理,就离不开滤波两个字。通常,信号的频谱处于有限的频率范围内,而噪声的频谱则散布在很广的频率范围内,为了消除噪声,可以进行频域滤波。但在许多应用场合,需要直接进行时域滤波,从带噪声的信号中提取有用信号。虽然这样的过程其实也算是对信号的滤波,但其所依据的理论,即针对随机信号的估计理论,是自成体系的。人们对于随机信号干扰下的有用信号不能“确知”,只能“估计”。为了“估计”,要事先确定某种准则以评定估计的好坏程度。 1960年卡尔曼发表了用递归方法解决离散数据线性滤波问题的论文A New Approach to Linear Filtering and Prediction Problems (线性滤波与预测问题的新方法),在这篇文章里一种克服了维纳滤波缺点的新方法被提出来,这就是我们今天称之为卡尔曼滤波的方法。卡尔曼滤波应用广泛且功能强大,它可以估计信号的过去和当前状态甚至能估计将来的状态即使并不知道模型的确切性质。 其基本思想是以最小均方误差为最佳估计准则,采用信号与噪声的状态空间模型利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值。算法根据建立的系统方程和观测方程对需要处理的信号做出满足最小均方误差的估计。 对于解决很大部分的问题,它是最优,效率最高甚至是最有用的。它的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。 卡尔曼滤波不要求保存过去的测量数据,当新的数据到来时,根据新的数据和前一时刻的储值的估计,借助于系统本身的状态转移方程,按照一套递推公式,即可算出新的估值。卡尔曼递推算法大大减少了滤波装置的存储量和计算量,并且突破了平稳随机过程的限制,使卡尔曼滤波器适用于对时变信号的实时处理。
卡尔曼滤波器及其简matlab仿真.
卡尔曼滤波器及其简matlab仿真 一、卡尔曼滤波的起源 谈到信号的分析与处理,就离不开滤波两个字。通常,信号的频谱处于有限的频率范围内,而噪声的频谱则散布在很广的频率范围内,为了消除噪声,可以进行频域滤波。但在许多应用场合,需要直接进行时域滤波,从带噪声的信号中提取有用信号。虽然这样的过程其实也算是对信号的滤波,但其所依据的理论,即针对随机信号的估计理论,是自成体系的。人们对于随机信号干扰下的有用信号不能“确知”,只能“估计”。为了“估计”,要事先确定某种准则以评定估计的好坏程度。 1960年卡尔曼发表了用递归方法解决离散数据线性滤波问题的论文A New Approach to Linear Filtering and Prediction Problems(线性滤波与预测问题的新方法),在这篇文章里一种克服了维纳滤波缺点的新方法被提出来,这就是我们今天称之为卡尔曼滤波的方法。卡尔曼滤波应用广泛且功能强大,它可以估计信号的过去和当前状态甚至能估计将来的状态即使并不知道模型的确切性质。 其基本思想是以最小均方误差为最佳估计准则,采用信号与噪声的状态空间模型利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值。算法根据建立的系统方程和观测方程对需要处理的信号做出满足最小均方误差的估计。 对于解决很大部分的问题,它是最优,效率最高甚至是最有用的。它的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。 卡尔曼滤波不要求保存过去的测量数据,当新的数据到来时,根据新的数据和前一时刻的储值的估计,借助于系统本身的状态转移方程,按照一套递推公式,即可算出新的估值。卡尔曼递推算法大大减少了滤波装置的存储量和计算量,并且突破了平稳随机过程的限制,使卡尔曼滤波器适用于对时变信号的实时处理。 二、卡尔曼滤波的原理
(完整word版)扩展卡尔曼滤波算法的matlab程序
clear all v=150; %%目标速度 v_sensor=0;%%传感器速度 t=1; %%扫描周期 xradarpositon=0; %%传感器坐标yradarpositon=0; %% ppred=zeros(4,4); Pzz=zeros(2,2); Pxx=zeros(4,2); xpred=zeros(4,1); ypred=zeros(2,1); sumx=0; sumy=0; sumxukf=0; sumyukf=0; sumxekf=0; sumyekf=0; %%%统计的初值 L=4; alpha=1; kalpha=0; belta=2; ramda=3-L; azimutherror=0.015; %%方位均方误差rangeerror=100; %%距离均方误差processnoise=1; %%过程噪声均方差 tao=[t^3/3 t^2/2 0 0; t^2/2 t 0 0; 0 0 t^3/3 t^2/2; 0 0 t^2/2 t]; %% the input matrix of process G=[t^2/2 0 t 0 0 t^2/2 0 t ]; a=35*pi/180; a_v=5/100; a_sensor=45*pi/180; x(1)=8000; %%初始位置
y(1)=12000; for i=1:200 x(i+1)=x(i)+v*cos(a)*t; y(i+1)=y(i)+v*sin(a)*t; end for i=1:200 xradarpositon=0; yradarpositon=0; Zmeasure(1,i)=atan((y(i)-yradarpositon)/(x(i)-xradarpositon))+random('Normal',0,azimutherror,1,1); Zmeasure(2,i)=sqrt((y(i)-yradarpositon)^2+(x(i)-xradarpositon)^2)+random('Normal',0,rangeerror,1,1); xx(i)=Zmeasure(2,i)*cos(Zmeasure(1,i));%%观测值 yy(i)=Zmeasure(2,i)*sin(Zmeasure(1,i)); measureerror=[azimutherror^2 0;0 rangeerror^2]; processerror=tao*processnoise; vNoise = size(processerror,1); wNoise = size(measureerror,1); A=[1 t 0 0; 0 1 0 0; 0 0 1 t; 0 0 0 1]; Anoise=size(A,1); for j=1:2*L+1 Wm(j)=1/(2*(L+ramda)); Wc(j)=1/(2*(L+ramda)); end Wm(1)=ramda/(L+ramda); Wc(1)=ramda/(L+ramda);%+1-alpha^2+belta; %%%权值 if i==1 xerror=rangeerror^2*cos(Zmeasure(1,i))^2+Zmeasure(2,i)^2*azimutherror^2*sin(Zmeasure(1,i))^2; yerror=rangeerror^2*sin(Zmeasure(1,i))^2+Zmeasure(2,i)^2*azimutherror^2*cos(Zmeasure(1,i))^2; xyerror=(rangeerror^2-Zmeasure(2,i)^2*azimutherror^2)*sin(Zmeasure(1,i))*cos(Zmeasure(1,i)); P=[xerror xerror/t xyerror xyerror/t; xerror/t 2*xerror/(t^2) xyerror/t 2*xyerror/(t^2); xyerror xyerror/t yerror yerror/t;
滤波反投影
平行束滤波反投影 1100500121 赵伟伦 准备知识: 一维Fourier 变换: dt e t f f f F t i ?+∞ ∞--?==πωω2)()(~)( 一维逆Fourier 变换: ωωπωd e f f F x f t i ?+∞ ∞--?==21)(~)~()( 且有:)~(~),(11f F F f f F F f --?=?= 重要的性质:(卷积特性) )(~)(~)*(ωωg f g f F ?=; )(~)(~)(ωωg f g f F *=? 二维Fourier 变换: dX e x x f f f F x x i R ),(),(22121221212),(),(~)(?-?= =ωωπωω; 逆二维Fourier 变换: Ω==?-?d e f f F x x f x x i R ),(),(22 1122121212),(~)~(),(ωωπωω; 中心切片定理: ),)(?()(2?ωωf F f F r =Φ, 其中),(??r f 是),(2 1x x f 的Radon 变换: 解释:一个二元函数的Radon 变换关于r 的一维Fourier 变换与这个二元函数的二维Fourier 变换形式相等。 滤波反投影: 思路: )(),(121f F F x x f ?=-
() ()[][]? ?ωω? ω?ω?ωω?ω?ω?ωωω?ωω?ω? ωω?ω?ωωω?ωωωππωωππωωππωωππωωπd r f F r d f F F d d e f F x x r d d e f F d d e f F d d e f d d e f F X r x x r r r r i r x x i r x x i r x x i x x i R Φ?=-Φ?=-∞+∞-?∞ +∞-?∞ +?∞+?*?=???Φ?=Φ=??? ? ???????????)(H ),(?fourier fourier ),()(H ),)(?(]),)(?([) ,),(),(),(),)(?(),)(?()(~)(1),(1202121),(),(20),(),(2200),(),(2200221),(),(222121212121212121212变化变化等于函数点乘后的个函数的卷积的并根据卷积的性质:两设旋转角为为坐标映射到探测器上,设为用极坐标方式表示出来(把,可知),(由于中心切片定理)(),(~),(r H r f r G *=?? )(r H 是滤波器 总结: ? ??ωω?ωππωπ d r H r f d d e f F X f X r X r r i r Φ?=Φ ?=+∞∞-???=???????=)(*),(?),)(?()(020 解释为: 投影数据),(??r f 先进行滤波)(*),(?r H r f ? 在对滤波数据进行投影??π d r H r f X r Φ?=?)(*),(?0
卡尔曼滤波简介及其算法实现代码
卡尔曼滤波简介及其算法实现代码 卡尔曼滤波算法实现代码(C,C++分别实现) 卡尔曼滤波器简介 近来发现有些问题很多人都很感兴趣。所以在这里希望能尽自己能力跟大家讨论一些力所能及的算法。现在先讨论一下卡尔曼滤波器,如果时间和能力允许,我还希望能够写写其他的算法,例如遗传算法,傅立叶变换,数字滤波,神经网络,图像处理等等。 因为这里不能写复杂的数学公式,所以也只能形象的描述。希望如果哪位是这方面的专家,欢迎讨论更正。 卡尔曼滤波器– Kalman Filter 1.什么是卡尔曼滤波器 (What is the Kalman Filter?) 在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。1957年于哥伦比亚大学获得博士学位。我们现在要学习的卡尔曼滤波器,正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems》(线性滤波与预测问题的新方法)。如果对这编论文有兴趣,可以到这里的地址下载: https://www.360docs.net/doc/b48117768.html,/~welch/media/pdf/Kalman1960.pdf。 简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。 2.卡尔曼滤波器的介绍 (Introduction to the Kalman Filter) 为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。 在介绍他的5条公式之前,先让我们来根据下面的例子一步一步的探索。 假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就
文档CT图像滤波反投影重建算法的研究
西北工业大学学位论文知识产权声明书本人完全了解学校有关保护知识产权的规定,即:研究生在校攻读学位期间论文工作的知识产权单位属于西北工业大学。学校有权保留并向国家有关部门或机构送交论文的复印件和电子版。本人允许论文被查阅和借阅。学校可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。同时本人保证,毕业后结合学位论文研究课题再撰写的文章一律注明作者单位为西北工业大学。保密论文待解密后适用本声明。学位论文作者签名::《!!!塑L指导教师签名。>况订年弓月多D日聊年岁月歹口日西北工业大学学位论文原创性声明秉承学校严谨的学风和优良的科学道德,本人郑重声明:所呈交的学位论文,是本人在导师的指导下进行研究工作所取得的成果。尽我所知,除文中已经注明引用的内容和致谢的地方外,本论文不包含任何其他个人或集体己经公开发表或撰写过的研究成果,不包含本人或其他已申请学位或其他用途使用过的成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式表明。本人学位论文与资料若有不实,愿意承担一切相关的法律责任。学位论文作者签名网年;月如日西北〕=业大学硕士学位论文第一章绪论第一章绪论本章首先概述了图像重建和CT技术的基本概念及图像重建方法的分类,然后介绍了CT的发展及国内外研究现状,最后阐明了本文的研究目的与意义、主要工作和内容安排。1.1图像重建与CT技术概述由物体的二维截面或断面向该平面内的各个方向作投影,可获得一系列一维投影函数。由这些一维投影函数来重建该二维截面则称为图像重建。该技术是随着计算机技术的进步而发展起来并获得广泛应用的图像处理技术,其最典型的应用是医学上的计算机断层成像术(computedT0mo鲫hy或cc胁puterized.Ibmo肿pby),简称为cT技术。它用于获取人体头颅、心肺、腹部等内部器官的二维断层图像(故亦称断层摄影技术),对于x射线放射诊断是一个重大突破,具有深远的实际意义,因而受到普遍的重视。1.1.1图像重建图像重建是图像处理中一个重要研究分支,是指根据对物体的探测获取的数据来重新建立图像,其重要意义在于获取被检测物体内部结构的图像而不对物体造成任何物理上的损伤。由于具备无损检测技术的显著优点,它在各个不同的应用领域中都显示出独特的重要性。例如:在医疗放射学、核医学、电子显微、无线电雷达天文学、光显微和全息成像学及理论视觉等领域都多有应用。在上述的众多领域中,图像重建在医学方面的应用最为显著。它大大丰富了对于人体内部器官进行无损检测的方法和手段,为疾病的早期正确诊断提供了科学的、准确的依据。根据原始数据获取方法及重建原理的不同可分为如下几种:发射断层重建成像(Emj醛i∞computcdTomography,Ec砷,透射断层重建成像frfansmissioncc吼plItcdTomo掣aphy,1∞,反射断层重建成像(Reflecti∞Cc粕puted劢衄ography,RcI)及核磁共振重建成像(Ma印eticRes∞卸cclIIIaging,MRn。西北工业大学硕士学位论文第一章绪论1.1.2CT技术在各种图像重建算法中,计算机断层成像术即CT技术占有重要的地位。cT技术的功能是将人体中某一薄层中的组织分布情况,通过射线对该薄层的扫描、检测器对透射信息的采集、计算机对数据的处理,并利用可视化技术在显示器或其他介质上显示出来。1.1.3图像重建的方法图像重建是CT技术中的一个重要问题。它的实质是按照采集后的数据,求解图像矩阵中象素,然后重新构造图像的过程;而图像矩阵的求解由计算机完成。图像重建问题的求解方法根据其特点可分为2大类。第1类是变换重建方法f也叫解析法呐,其特点是先在连续域解析处理,最后离散化以利用计算机计算。其中又可分成傅里叶反变换重建法和滤波(或卷积)反投影重建法。第2类是级数展开重建法12j13l(也叫代数重建法、迭代算法、优化技术等),其特点是从开始就离散化进行分析,从而直接得到数值解。另外还有将变换法和级数展开法相结合的综合方法,如:迭代变换法、迭代重建重投影、角谐函数重建法和正交多项式展开重建。变换法的突出优点是实现简单,速度快,对足够精确的投影数据能获得很好的重建质量。因此目前实用CT系统中,尤其是医用cT系统中广泛采用变换法,特别是滤波反投影类型的算法来进行图像重建。变换法在技术上有两个主要的限制:(1)噪声特性不好。因为变换法是基于解析求反公式的闭合形式,要求投影数据是精确的。对于数据中的噪声,可以通过滤波步骤来适当解决。如果我们能在投影数据输入给变换法之前,将影响投影数据不精确性的诸多物理因素进行足够的校正,则便可以认为投影数据是相当准确的,从而得到满意的重建。(乃正因为变换法基于解析求反公式的闭合形式,所以变换法的简单与复杂强烈地依赖于数据采集扫描方
滤波反投影
滤波反投影法重建CT 图像实验指导书 一、 实验目的 1. 了解傅立叶变换法、直接反投影法重建CT 图像的原理; 2. 掌握滤波反投影法重建CT 图像的原理和基本方法。 二、 实验器材 装有MATLAB 程序的PC 机,滤波反投影法图像重建演示软件,投影数据。 三、 实验原理 CT 图像重建问题实际上就是如何从投影数据中解算出成像平面上各像素点的衰减系数。图像重建的算法有多种,如反投影法、傅立叶变换法、迭代法、滤波反投影法等。在介绍算法前,有必要先介绍从投影重建图像的重要依据,即中心切片定理。 1. 中心切片定理 密度函数(,)f x y 在某一方向上的投影函数()g R θ的一维傅立叶变换函数()g θρ是原密度函数(,)f x y 的二维傅立叶变换函数(,)F ρθ在(,)ρθ平面上沿同一方向且过原点的直线上的值。 图1 中心切片定理 2.傅立叶变换法 如果在不同角度下取得足够多的投影函数数据,并作傅立叶变换,根据中心切片定理,变换后的数据将充满整个(,)u v 平面。一旦频域函数(,)F u v 或(,)F ρβ的全部值都得到后,将其做傅立叶反变换,就能得到原始的密度函数(,)f x y ,即所要重建的图像。
上述图像重建算法称为傅立叶变换法,图2给出了傅立叶变换重建方法的流程图。图中指出,对于每次测得的投影数据先作一维傅立叶变换。根据中心切片定理,可将此变换结果看成二维频率域中同样角度下过原点的直线上的值。在不同投影角下所得的一维变换函数可在频域中构成完整的二维傅立叶变换函数,将此二维变换函数做一次逆变换,就得到了所要求的空间域中的密度函数。为了在二维逆变换中采用快速傅立叶变换算法,通常在逆变换前要将极坐标形式的频域函数变换成直角坐标形式的数据。 图2 傅立叶变换重建图像的过程 采用傅立叶变换法重建图像时,投影函数的一维傅立叶变换在频域中为极坐标形式,把极坐标形式的数据通过插补运算转换为直角坐标形式的数据时,计算工作量较大。此外,在极坐标形式的频域数据中,离原点较远的频率较高的部分数据比较稀疏,当这些位置上的数据转换到直角坐标下时,需经插补,这将引入一定程度的误差。即,在重建的图像中,高频分量可能有较大失真。 3.直接反投影法 直接反投影法把每次测得的投影数据“原路”反投影到投影线的各个像素上。即指定投影线上所有各点的值等于所测得的投影值。如图3所示的例子中,被探查物体只是在原点位置上的一个致密点。在一个角度上测量到其投影值时,就把这个值赋给投影线上的所有点。于是,从不同角度进行反投影后的重建图像是由以原点为中心的一系列辐射线。显然,原点位置上的分布密度最高;愈往四周,密度愈低。这当然可以说是粗略地把图像恢复出来了。但问题是除了密度最大的中心点,四周出现了逐渐变浅的云晕状阴影。 图3直接反投影重建法
卷积反投影重建(二维)
卷积反投影图像重建 1 反投影重建基本介绍[1] 设待重建图像为),(y x a ,它的二维傅氏变换为^ 1 2 (,)(,)A A ωωρφ=。根据中心切片定理,^ (,)A ρφ可通过),(y x a 在不同视角φ下的投影()r p x φ的 一维傅氏变换求得。即: 待建图像: 12^ 1212()1212 2 ^2cos()0 2cos()02cos()0(,)(,)(,)1(,)4(,)(,)(,)i x y i r i r i r a r a x y F A A e d d A e d d P e d d d P e d ωωππρθφπ πρθφπ πρθφθωωωωωωπρφρρφ ρφρρφ φρρφρ -∞∞ +-∞-∞ ∞--∞ ∞ --∞ ∞ --∞======?? ??? ? ?? [] (1.1) 因为cos()r x r θφ=-,所以有: 122(cos sin )22cos()r x y x y x r ωωπρφφπρπρθφ+=+==- 同时: 12d d J d d ωωρφ= 11222//2cos 2sin 4//2sin 2cos J ωρωφπφ πρφ πρωρωφπφ πρφ ????-= = =???? (1.2) 先来看该式的第二个积分: [] 22cos() cos()cos()cos()(,)(,)|()(,)|(,)|cos(),r r r r i x i r x r r r x r r x r P e d P e d h x p x g x g r πρπρθφθφθφθφρρφρρρφρ φφθφφ∞ ∞ -=--∞ -∞ =-=-==*==-? ? (1.3) 式中:(,)()(,)r r r g x h x p x φφ=* (1.4) ^ 121(,)(,)()()(,)r A A F p x P P φφωωρφρρφ??====??
matlab对卡尔曼滤波的仿真实现
MATLAB 对卡尔曼滤波器的仿真实现 刘丹,朱毅,刘冰 武汉理工大学信息工程学院,武汉(430070) E-mail :liudan_ina@https://www.360docs.net/doc/b48117768.html, 摘 要:本文以卡尔曼滤波器原理为理论基础,用MATLAB 进行卡尔曼滤波器仿真、对比卡尔曼滤波器的预测效果,对影响滤波其效果的各方面原因进行讨论和比较,按照理论模型进行仿真编程,清晰地表述了编程过程。 关键词:数字信号处理;卡尔曼滤波器;MATLAB ;仿真过程 中图分类号: TN912.3 1. 引言 随着信息时代和数字世界的到来,数字信号处理已成为当今一门极其重要的学科和技术领域。数字信号处理已在通信、语音、图像、自动控制、雷达、军事、航空航天、医疗和家用电器等众多领域得到了广泛的应用。在数字信号处理中,数字滤波占有极其重要的地位,目前对数字滤波器的设计有多种方法,其中著名的MATLAB 软件包在多个研究领域都有着广泛的应用,它的频谱分析[1]和滤波器的分析设计功能很强,从而使数字信号处理变得十分简单、直观。本文分析了数字滤波器的设计方法,举出了基于MATLAB 软件的信号处理工具在数字滤波器设计中的应用。 2. 卡尔曼滤波基本原理 卡尔曼滤波过程实际上是获取维纳解的递推运算过程[2]。从维纳解导出的卡尔曼滤波器实际上是卡尔曼滤波过程结束后达到稳态的情况,这时Kalman Filtering 的结果与Wiener Solution 是相同的[3]。具体推导如下: )()1|1(?)|(?n Gy n n x f n n x +??= )|(?)()(n n x n x n e ?= 已知由此求c a cG a f F G n e E n ,)1(( ..min )]([)(2?=??→?==ε 由 f G f G ,0??????????=??εε ⑴ )]1|1(?)()[()1|1(?)|(????+??=n n x ac n y n G n n x a n n x 可以是时变的,非平稳的随机信号 ⑵ Q n a n P +?=)1()(2 ε均为正数。 ⑶ ) () ()(2n P C R n CP n G += ⑷ )()](1[)()(n P n CG n G C P n ??== ε )(n G 是个随时间变化的量,每次输入输出,)(n G 就调整一次,并逐渐逼近Kalman Filter 的增益G ,而)1()(? 信息融合大作业 ——维纳最速下降法滤波器,卡尔曼滤波器设计及Matlab仿真 1.滤波问题浅谈 估计器或滤波器这一术语通常用来称呼一个系统,设计这样的系统是为了从含有噪声的数据中提取人们感兴趣的,接近规定质量的信息。由于这样一个宽目标,估计理论应用于诸如通信、雷达、声纳、导航、地震学、生物医学工程、 金融工程等众多不同的领域。例如,考虑一个数字通信系统,其基本形式由发 射机、信道和接收机连接组成。发射机的作用是把数字源(例如计算机)产生的0、1符号序列组成的消息信号变换成为适合于信道上传送的波形。而由于符号间干扰和噪声的存在,信道输出端收到的信号是含有噪声的或失真的发送信号。接收机的作用是,操作接收信号并把原消息信号的一个可靠估值传递给系统输出端的某个用户。随着通信系统复杂度的提高,对原消息信号的还原成为通信系统中最为重要的环节,而噪声是接收端需要排除的最主要的干扰,人们也设计出了针对各种不同条件应用的滤波器,其中最速下降算法是一种古老的最优化技术,而卡尔曼滤波器随着应用条件的精简成为了普适性的高效滤波器。2.维纳最速下降算法滤波器 2.1 最速下降算法的基本思想 考虑一个代价函数,它是某个未知向量的连续可微分函数。函数 将的元素映射为实数。这里,我们要寻找一个最优解。使它满足如下条件 (2.1) 这也是无约束最优化的数学表示。 特别适合于自适应滤波的一类无约束最优化算法基于局部迭代下降的算法: 从某一初始猜想出发,产生一系列权向量,使得代价函数在算法的每一次迭代都是下降的,即 其中是权向量的过去值,而是其更新值。 我们希望算法最终收敛到最优值。迭代下降的一种简单形式是最速下降法,该方法是沿最速下降方向连续调整权向量。为方便起见,我们将梯度向量表示为 Kalman滤波和MATLAB实现 卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理算法(optimal recursive data processing algorithm)。对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等 简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。 为了可以更加容易的理解卡尔曼滤波器,这里应用形象的描述方法讲解,不像参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。 假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就是下一分钟的温度等于现在这一分钟的温度。假设你对你的经验不是100%的相信,可能会有上下偏差几度。我们把这些偏差看成是高斯白噪声,也就是这些偏差跟前后时间是没有关系的而且符合高斯分配。另外,我们在房间里放一个温度计,但是这个温度计也是不准确的,测量值会比实际值有偏差。我们也把这些偏差看成是高斯白噪声。 好了,现在对于某一分钟我们有两个有关该房间的温度值:你根据经验的预测值(系统的预测值)和温度计的值(测量值)。下面我们要用这两个值结合他们各自的噪声来估算出房间的实际温度值。 假如我们要估算k时刻的实际温度值。首先你要根据k-1时刻的温度值,来预测k时刻的温度。因为你相信温度是恒定的,所以你会得到k时刻的温度预测值是跟k-1时刻一样的,假定是23度,同时该值的高斯噪声的偏差是5度(5是这样得到的:如果k-1时刻估算出的最优温度值的偏差是3,你对自己预测的不确定度是4度,他们平方相加再开方,就是5)。然后,你从温度计那里得到了k时刻的温度值,假设是25度,同时该值的偏差是4度。 由于我们用于估算k时刻的实际温度有两个温度值,分别是23度和25度。究竟实际温度是多少呢?相信自己还是相信温度计呢?究竟相信谁多一点,我们可以用他们的协方差(covariance)来判断。因为Kg^2=5^2/(5^2+4^2),所以Kg=0.78,我们可以估算出k时刻的实际温度值是:23+0.78*(25-23)=24.56度。可以看出,因为温度计的covariance比较小(比较相信温度计),所以估算出的最优温度值偏向温度计的值。 现在我们已经得到k时刻的最优温度值了,下一步就是要进入k+1时刻,进行新的最优估算。到现在为止,好像还没看到什么自回归的东西出现。对了,在进入k+1时刻之前,我们还要算出k时刻那个最优值(24.56度)的偏差。算法如下:((1-Kg)*5^2)^0.5=2.35。这里的5就是上面的k时刻你预测的那个23度温度值的偏差,得出的2.35就是进入k+1时刻以后k时刻估算出的最优温度值的偏差(对应于上面的3)。维纳最速下降法滤波器卡尔曼滤波器设计及Matlab仿真
Kalman 滤波和MATLAB 实现