MSC.Patran中体单元与壳单元的连接方法的探索
MSC.Patran 中体单元与壳单元的连接方法的探索*
陈继华 杜家政 隋允康 管昭
(北京工业大学数值模拟中心)
摘要:本文对用MSC.Patran 建立体壳混合模型时,就怎样使体壳连接边的节点相互对应协调;以及怎样解决因为体壳单元自由度不同而使得两者之间用Equivalence (节点相等)不能固定的问题进行了些使用上的摸索;同时对该软件在计算应力集中问题的可靠性进行了检验,为用本软件建模提供了些可借鉴的方法。
Research of joint solid-element & shell element in PATRAN
Jihua Chen Jiazheng Du Yunkang Sui Zhao Guan
(Numerical Simulation Center for Engineering
Beijing Polytechnic University)
Abstract :This paper is about how to make nodes of the mutual edges of the solids and the shells to assort with each other and how to solve the problem which is aroused by the difference of the free degrees of the solid and the shell so that “Equivalence ” could not be used to solve it, when the compound model is founded by using MSC.Patran. Moreover, the paper makes some practices to test the software ’s reliability of the calculational stress concentrate and gives some referenced methods for modeling with the software.
一、 前言
在对一些工程实际问题建模时发现不能用单一的某种单元来处理,而是体、壳、梁或杆的混合模型。但由于这些单元的自由度上的差异造成点对点之间不能用Equivalence 直接连接,比如体单元只有平动三个自由度,而壳单元有五个自由度,用Equivalence 只能保证两者的连接没有相互移动,不能保证两者之间没有转动。本文就这个问题就怎样使用MPC (multitude point control )做了些实践性的摸索。
二、模型的建立和单元的划分
在建立单一的体、壳模型时,只要保证
各个几何实体之间有公共的边、面或用
Associate 使之相互协调,以保证划分网格后
用Equivalence 命令来得到期望的有限元模
型。但要建立体壳混合的有限元模型时,仅
仅这样是不够的(对于B-rep 体),因为这
*国家自然科学基金委资助的课题(10072005)、北京市自然科学基金委资助的课题(3002002)
图1
第3行 第2行 第1行
样并不能保证体和壳的公共边上的节点相互对应。通过反复的摸索发现可以在先保证体边和壳边协调的前提下,对体的表面及壳面先划分单元,然后再对体划分单元,这样体壳公共边上有位置相同的接点,如图1,然后删除体上的面单元或对这些单元不加属性。同理,当体的表面是比较复杂的曲面时,为了保证有限元模型与几何模型更接近也得用这种方法。
三、用MPC 点连接体壳
建立如图2所视的体壳混合模型,体的长宽高分别为10、3、4,面的长为20,宽为3,两者的过度处用圆角连接,在壳的最右边施加与壳面垂直的均布力,其和为44,体的左端面固定。要实现体和壳的连接可以选用RSCCON Surf-Vol 和Rigid 之一。两者有所不同,前者dependent 点是一项,independent 点是两项,后者dependent 点的项数不定,但independent 点是一项;但两者每项的点数都必须相等,都必须在体上选至少两组点。前者必须使壳上的点作为dependent 中的项,体上的两组点都是independent 中的项;后者壳上的点可以在dependent 中也可在independent 中。
1. 交接面单元的不同划分的比较
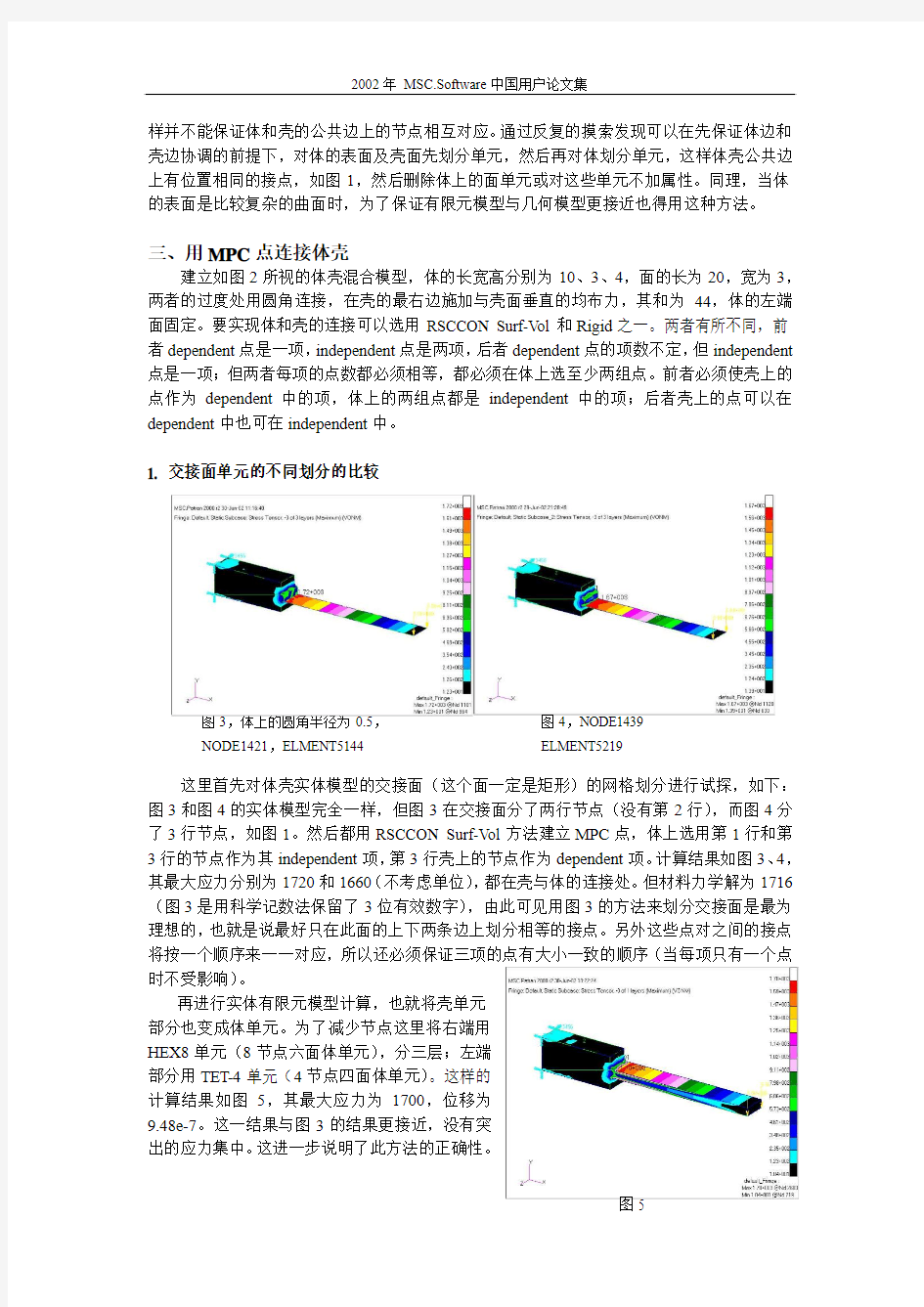
这里首先对体壳实体模型的交接面(这个面一定是矩形)的网格划分进行试探,如下: 图3和图4的实体模型完全一样,但图3在交接面分了两行节点(没有第2行),而图4分了3行节点,如图1。然后都用RSCCON Surf-Vol 方法建立MPC 点,体上选用第1行和第3行的节点作为其independent 项,第3行壳上的节点作为dependent 项。计算结果如图3、4,其最大应力分别为1720和1660(不考虑单位),都在壳与体的连接处。但材料力学解为1716(图3是用科学记数法保留了3位有效数字),由此可见用图3的方法来划分交接面是最为理想的,也就是说最好只在此面的上下两条边上划分相等的接点。另外这些点对之间的接点将按一个顺序来一一对应,所以还必须保证三项的点有大小一致的顺序(当每项只有一个点时不受影响)。
再进行实体有限元模型计算,也就将壳单元
部分也变成体单元。为了减少节点这里将右端用
HEX8单元(8节点六面体单元),分三层;左端
部分用TET-4单元(4节点四面体单元)。这样的
计算结果如图5,其最大应力为1700,位移为
9.48e-7。这一结果与图3的结果更接近,没有突
出的应力集中。这进一步说明了此方法的正确性。
图4,NODE1439 ELMENT5219
图5
图3,体上的圆角半径为0.5,
NODE1421,ELMENT5144
2. 两种体壳连接方法的比较
图6、7的有网格划分完全一样,但图6是用RSCCON Surf-V ol 建立MPC 点连接交界面的上下两排节点,图7是用Rigid 建立MPC 点,其计算的最大应力都是1720,最大位移都是
9.45e-7,与完全用体单元的计算结果很相近。也就是说在此对称模型中,当两种方法选用同样的点对,且在用Rigid 建MPC 点时,使体上的两组点都是dependent 中的项,这时模型的计算结果基本一样。但体与壳的连接部分的应力略有变化,交接面上的最大应力前者为923后者为920。
当建立如图8的模型,也就是图2的模型由壳
体所在的平面剪去体的下部分,并且去掉圆角而成
的模型(这个模型为了突出连接处的应力集中),
边界条件不变。用Hex8划分体单元,除最下层体
单元高度为1之外,其他单元尺寸0.2。然后分别
用RSCCON Surf-V ol 和Rigid 建立MPC 点连接交
界面的上下两排节点,其计算结果分别为图9和图
10。
前者的最大应力为2170,后者的最大应力为1710(与材力解近似),这里应力出现了很大的差异,但位移相差不到1%
再将模型拓成实体用边长为0.2的Hex8单元进行计算,其结果如图11,其最大应力为2090,这与图9的应力相差只有4%,位移都一样,但与图10相差18%。由此可见要考虑应力集中时用RSCCON Surf-V ol 建立MPC 点是正确的。
图7,体上的圆角半径为0.5, NODE1421,ELMENT5144
图6,体上的圆角半径为0.5,
NODE1421,ELMENT5144 图
8 图
9 图10
3. 对应力集中系数的验证
这里选用《应力集中》中的一个模型,即两侧有圆角的带板的平面
弯曲模型,如图12。左边宽为5长为10,右边宽为3长为20,板厚为1,中间用0.5的圆弧光滑连接。
为了计算精确选用Quad8单元。边界条件为左端固定,左端加垂直于板面的均布弯矩,其和为52。由于壳单元缺少与壳面垂直轴绕动的自由度,所以不能直接将纯弯矩加在壳单元节点上,这里要用Rigid 选项建立MPC 点将要加载的节点连起来(也就是建立刚性边)再加载。对体单元也有类似情况,由于体单元只有平动自由度所以不能直接加纯弯矩,需要用Rigid 选项建立MPC 点将要加载的节点连起来,当连的点在一条线上时,加的纯弯矩的方向不能与这条线平行。这里也可以将弯矩转化成一对相反力系来加载,但这样对力作用处的应力有一定影响。图13为单元边长0.1时的计算结果,其最大应力为56.1,在圆角处,而材力解在圆角处的应力为34.7,约增大了61.6%。
这里用Heywood 的光弹实验公式来计算应力集中系数。以窄端带板所承受的最大平面弯矩而产生的应力206th M =σ为基准应力(t 为板厚,h 为窄端板高)
,取最大应力0σσ对A 之比为应力集中系数:85.08.437.511??????-?-+=ρb b B b B a ,计算得54.0=a 。
式中B 代表左端高,b 代表右端高,ρ为圆弧半径。按此计算出的最大应力为53.438,以此值为基准,计算值增大了约5%,在允许范围内。
图11
图12
图13
由后面三项可以知道这个应力集中值在51--57之间,基本收敛。而本身光弹实验值也是有一定误差的,所以这个计算值应该是相当不错的结果。
为了进一步验证RSCCON Surf-V ol 选项的功能,将图12的1、2部分用TET4单元,而第3部分用壳单元(请注意交接面的单元划分)来进行计算。其结果如下:
图14的TET 单元长度为0.2,图15的单元长度为0.15,其计算结果的最大值分别为49.7、54.9,与理论值相差分别为7%和2.7%
四、结论
通过上面多种模型的计算分析让我们对RSCCON Surf-V ol 和Rigid 两个选项的功能和用法技巧有了比较全面的掌握,对体和壳的连接有了合理的方法。同时验证了该软件在计算应力集中问题上的可靠性,得到了在缺少某个转动自由度的情况下在该自由度方向上加纯弯矩方法,为这方面的模拟计算提供了参考。
参 考 文 献
1. [日]西天正孝著, 李安定、郭廷玮等译. 应力集中. 机械工业出版社, 1986年12月北京
2. MSC-NASTRAN&PATRAN 技术手册
图
14 图15
高中物理常见连接体问题总结知识分享
常见连接体问题 (一)“死结”“活结” 1.如图甲所示,轻绳AD跨过固定在水平横梁BC右端的定滑轮挂住一个质量为10 kg 的物体,∠ACB=30°;图乙中轻杆HG一端用铰链固定在竖直墙上,另一端G通过细绳EG拉住,EG与水平方向也成30°,轻杆的G点用细绳GF拉住一个质量也为10 kg 的物体.g取10 m/s2,求 (1)细绳AC段的张力FAC与细绳EG的张力FEG之比; (2)轻杆BC对C端的支持力; (3)轻杆HG对G端的支持力. (二)突变问题 2。在动摩擦因数μ=0.2的水平 质量为m=1kg的小球,小球与水平轻弹簧及与竖直方向成θ=45°角的不可伸长的轻绳一端相连,如图所示,此时小球处于静止 平衡状态,且水平面对小球的弹力恰好为零,当剪断轻绳的瞬间,取g=10m/s2,求: (1)此时轻弹簧的弹力大小 (2)小球的加速度大小和方向.(三)力的合成与分解 3.如图所示,用一根细线系住重力为、半径为的球,其与倾角为的光滑斜面劈接触, 处于静止状态,球与斜面的接触面非常小, 当细线悬点固定不动,斜面劈缓慢水平向左 移动直至绳子与斜面平行的过程中,下述正确的是(). A.细绳对球的拉力先减小后增大 B.细绳对球的拉力先增大后减小 C.细绳对球的拉力一直减小 D.细绳对球的拉力最小值等于G (四)整体法 4.如图所示,质量分别为m1、m2的两个物体通过轻弹簧连接。在力F的作用下一起沿水平方向做匀速直线运动(m1在地面,m2在空中),力F与水平方向成θ角,则m1所受支持力N 和摩擦力f正确的是() A.N=m1g+m2g-Fsinθ B.N=m1g+m2g-Fcosθ C.f=Fcosθ D.f=Fsinθ (五)隔离法 5.如图所示,水平放置的木板上面放置木块,木板与木块、木板与地面间的摩擦因数分别为μ1和μ2。已知木块质量为m,木板的质量为M,用定滑轮连接如图所示,现用力F匀速拉动木块在木板上向右滑行,求力F的大小?
一级倒立摆的建模与控制分析
控制工程与仿真课程设计报告 报告题目直线一级倒立摆建模、分析及控制器的设计 组员1专业、班级14自动化1 班姓名朱永远学号1405031009 组员1专业、班级14自动化1 班姓名王宪孺学号1405031011组员1专业、班级14自动化1 班姓名孙金红学号1405031013 报告评分标准 评分项目权重评价内容评价结果项目得分 内容70设计方案较合 理、正确,内容 较完整 70-50分 设计方案基本合 理、正确,内容 基本完整 50-30分 设计方案基本不 合理、正确,内 容不完整 0-30分 语言组织15语言较流顺,标 点符号较正确 10-15分语言基本通顺, 标点符号基本正 确 5-10分 语言不通顺,有 错别字,标点符 号混乱 5分以下 格式15 报告格式较正 确,排版较规范 美观 10-15分 报告格式基本正 确,排版不规范 5-10分 报告格式不正 确,排版混乱 5分以下总分
直线一级倒立摆建模、分析及控制器的设计 一状态空间模型的建立 1.1直线一级倒立摆的数学模型 图1.1 直线一级倒立摆系统 本文中倒立摆系统描述中涉及的符号、物理意义及相关数值如表1.1所示。
图1.2是系统中小车的受力分析图。其中,N 和P 为小车与摆杆相互作用力的水平和垂直方向的分量。 图1.2 系统中小车的受力分析图 图1.3是系统中摆杆的受力分析图。F s 是摆杆受到的水平方向的干扰力, F h 是摆杆受到的垂直方向的干扰力,合力是垂直方向夹角为α的干扰力F g 。
图1.3 摆杆受力分析图 分析小车水平方向所受的合力,可以得到以下方程: ()11- 设摆杆受到与垂直方向夹角为α 的干扰力Fg ,可分解为水平方向、垂直方向的干扰力,所产生的力矩可以等效为在摆杆顶端的水平干扰力FS 、垂直干扰力Fh 产生的力矩。 ()21- 对摆杆水平方向的受力进行分析可以得到下面等式: ()θsin 22 l x dt d m F N S +=- ()31- 即: αθθθθsin sin cos 2f F ml ml x m N +-+= ()41- 对图1.3摆杆垂直方向上的合力进行分析,可以得到下面方程: ()θcos 22 l l dt d m F mg P h -=++- ()51- 即 θθθθ αcos sin cos 2 ml ml F mg P g +=++- ()61- 力矩平衡方程如下: 0cos sin sin cos cos sin =++++θθθθαθα I Nl Pl l F l F g g ()71- 代入P 和N ,得到方程: () 0cos 2sin sin 2cos sin cos 2cos sin 2222=+-++++θθθθθθθαθαx ml ml mgl ml I l F l F g g ()81- 设φπθ+=,(φ是摆杆杆与垂直向上方向之间的夹角,单位是弧度),代入上式。假设φ<<1,则可进行近似处理: φφφφφφφ===?? ? ??==2sin ,12cos ,0,sin ,1cos 2 dt d N x f F x M --= α sin g S F F =α cos g h F F =
届一轮复习 连接体问题 教案
考点三连接体问题 基础点 知识点1 连接体 1.定义:多个相互关联的物体连接(叠放、并排或由绳子、细杆联系)在一起构成的物体系统称为连接体。连接体一般具有相同的运动情况(速度、加速度)。如下图所示:
2.处理连接体问题的方法:整体法与隔离法,要么先整体后隔离,要么先隔离后整体。 (1)整体法是指系统内(即连接体内)物体间无相对运动时(具有相同加速度),可以把连接体内所有物体组成的系统作为整体考虑,分析其受力情况,对整体列方程求解的方法。 整体法可以求系统的加速度或外界对系统的作用力。 (2)隔离法是指当我们所研究的问题涉及多个物体组成的系统时,需要求连接体内各部分间的相互作用力,从研究方便出发,把某个物体从系统中隔离出来,作为研究对象,分析其受力情况,再列方程求解的方法。 隔离法适合求系统内各物体间的相互作用力或各个物体的加速度。 3.整体法、隔离法的选取原则
(1)整体法的选取原则 若连接体内各物体具有相同的加速度,且不需要求物体之间的作用力,可以把它们看成一个整体,分析整体受到的合外力,应用牛顿第二定律求出加速度(或其他未知量)。 (2)隔离法的选取原则 若连接体内各物体的加速度不相同,或者要求出系统内各物体之间的作用力时,就需要把物体从系统中隔离出来,应用牛顿第二定律列方程求解。 (3)整体法、隔离法的交替运用 若连接体内各物体具有相同的加速度,且要求出物体之间的作用力时,可以先用整体法求出加速度,然后再用隔离法选取合适的研究对象,应用牛顿第二定律求作用力。即“先整体求加速度,后隔离求内力”。 知识点2 临界与极值 1.临界问题 物体由某种物理状态转变为另一种物理状态时,所要经历的一种特殊的转折状态,称为临界状态。这种从一种状态变成另一种状态的分界点就是临界点,此时的条件就是临界条件。
倒立摆姿态控制模型
倒立摆 倒立摆百度文库解释: 倒立摆系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值,计算机在每一个采样周期中采集来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。 倒立摆系统简介 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。平面倒立摆可以比较真实的模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。 倒立摆分类
学法指导的研究
“学法指导的研究”结题报告 素质教育是一种新的教育思想和教育教学改革的实践,必须在科研上下功夫,在教学领域深化,才能取得突破性进展。我校自1999年9月开始,开展了数学“自学,讨论、质疑、练习”学法的指导课题的研究与实验,作为县教育教学改革的研究课题,在我校中高年级各个班级推开。我们认为,搞好本课题的研究与实验,将有助于我校素质教育实现大面积推进,并形成我校实施素质教育的特色。作为“自学,讨论、质疑、训练”教研课题的子课题“学法指导的研究”的研究人员,我们作了以下几点思考: 一、子课题实验的理论依据 埃德加·富尔在《学会生存》一书中指出:“未来社会的文盲不再是目不识丁的人,而是没有学会怎样学习的人”。“教会学生学习”已成为当今世界流行的口号。顺应时代的发展,就要求我们充分发挥学生的自主性,把学习的主动权交给学生。“外因是变化的条件,内因是变化的依据。”只有自身产生了强烈的求知欲望,才会自觉地积极主动地去学习,才会表现出良好的注意力和克服困难的意志,才会参与教学活动的全过程,才能成为学习的主体,并 具有创造的积极性。 《学记》曰:“君子之教,喻也。道而弗牵则和,强而弗抑则易,开而弗达则思。和易以思,可谓善喻也”。也就是说:要引导而不是牵着学生走;要鼓励而不是压抑学生;要指导学生的学习方法而不是代替学生做出结论。这样才不至于压抑学生,而促使学生真正开动脑筋独 立思考。 1、教育主体自主性发展的教育理念。教育是培养人的活动,现代教育是以现代生产和现代生活方式为基础,以现代科技和现代文化为背景,坚持与社会实践相结合,以培养自主性发展的个人为目的的教育。现代社会发展需要现代教育培养的人必须具有创新精神和创新能 力。 当前,我们的教育理论和教育实践存在着种种弊端,其中之一是在培养人的过程中轻视乃至忽视了教育主体的自主性发展。表现为实行整齐划一的模式化的教育,只重视知识的掌握,忽视创新精神、创新能力和个性发展的培养,造成学生被动地学习,动手与实践能力差,参与意识和参与能力不强等。自学能力的养成教育作为教育改革的起点和依据,对现行教育中不合理的观念、思维方式和行为方式进行根本性改造,力图实现教育理论和教育观念的变 革。 2、以学习论为核心的现代教育教学理念。适应知识经济时代和学习社会的需要,传统的教育教学理念需要根本性变革。变革的重点表现在三个方面。一是要以教育主体自主性发展和创新教育为中心来构建现代教育的理论体系,建立以“学会学习”为中心内容的现代教育理论。二是以“学习论”改造现行的“教学论”,建立“学习论”为中心的现代教学观念。三是以学 法研究为中心带动教学法观念的根本性变革。 3、科学的以理解为核心的学习观。教师要使学生成为自学的主体,必须确立学习是一个理解、记忆、运用过程的观念,学生对知识的掌握是一个初步理解、强化记忆、学会应用、加深理解的过程。自学过程的实质和核心在于理解,而不是记忆。确立这样的学习现才能使学到的知识更稳固、更灵活,才有可能使知识成为创造力的翅膀。 4、动态的结构化的知识观。在自学的过程中,教师要确立科学的结构化的知识现,既要重视书本知识的教学,又要注意引导学生对经验的积累和理论化:学生既要重视学习"是什么"和"为什么"的知识,更要重视对"怎么做"的知识的学习。 让学生自觉地学习,把学习主动权交给学生,这是素质教育和社会发展的要求,是培养21 世纪高素质建设人才的要求。 二、子课题研究内容 (一)、自学能力的培养
(完整版)高中物理连接体问题精选(含答案),推荐文档
题型一 整体法与隔离法的应用 例题1 如图所示,光滑水平面上放置质量分别为m 和2m 的四个木块,其 中两个质量为m 的木块间用一不可伸长的轻绳相连,木块间的最大静摩擦 力是μmg 。现用水平拉力F 拉其中一个质量为2 m 的木块,使四个木块以 同一加速度运动,则轻绳对m 的最大拉力为 A 、5mg 3μ B 、4mg 3μ C 、2mg 3μ D 、mg 3μ变式1 如图所示的三个物体A 、B 、C ,其质量分别为m 1、m 2、m 3,带有滑轮 的物体B 放在光滑平面上,滑轮和所有接触面间的摩擦及绳子的质量均不 计.为使三物体间无相对运动,则水平推力的大小应为F =__________ 2.如图,质量为2m 的物块A 与水平地面的摩擦可忽略不计,质量为m 的物块B 与地面的动摩擦因数为μ,在已知水平推力F 的作用下,A 、B 做加速运动,A 对B 的作用力为多少? 3.如图所示,质量为M 的木箱放在水平面上,木箱中的立杆上套着一个质量为m 的小球,开始时小球在杆的顶端,由静止释放后,小球沿杆下滑的加速度为a = g ,则小球在下滑的2 1过程中,木箱对地面的压力为多少?4.两个质量相同的小球用不可伸长的细线连结,置于场强为E 的匀强电场中,小球1和小球 2均带正电,电量分别为q 1和q 2(q 1>q 2)。将细线拉直并使之与电场方向平行,如图所示。若将两小球同时从静止状态释放,则释放后细线中的张力T 为(不计重力及两小球间的库仑力)( ) A . B . 121()2 T q q E =-12()T q q E =-C . D .121()2T q q E =+12()T q q E =+5.如图所示,光滑水平面上放置质量分别为m 、2m 和3m 的三个木块,其中质量为2m 和3m 的木块间用一不可伸长的轻绳相连,轻绳能承受的最大拉力为F T 。现用水平拉力F 拉质量为3m 的木块,使三个木块以同一加速度运动,则以下说法正确的是( ) A .质量为2m 的木块受到四个力的作用 B .当F 逐渐增大到F T 时,轻绳刚好被拉断 C .当F 逐渐增大到1.5F T 时,轻绳还不会被拉断 D .轻绳刚要被拉断时,质量为m 和 2m T 1 2-图E 球1
倒立摆建模
系统建模 系统建模可以分为两种:机理建模和实验建模.实验建模就是通过在研究对象上加上一系列的研究者先确定的输入信号,激励研究对象并通过传感器的检测其可观测的输出,应用数学手段建立起系统输入---输出关系.这里包括输入信号的设计选取,输出信号的精确检测,数学算法的研究等等内容.机理建模就是在了解研究对象在运动规律基础上,通过物理,化学的知识和数学手段建立起的系统内部的输入输出状态关系.系统的建模原则: 1) 建模之前,要全面了解系统的自然特征和运动机理,明确研究目的和准确性要求,选择合适的分析方法。 2) 按照所选分析法,确定相应的数学模型的形式; 3) 根据允许的误差范围,进行准确性考虑,然后建立尽量简化的合理的数学模型。 小车—倒立摆系统是各种控制理论的研究对象。只要一提小车—倒立摆系统,一般均认为其数学模型也已经定型。事实上,小车—倒立摆的数学模型与驱动系统有关,常见到的模型只是对应于直流电机的情况,如果执行机构是交流伺服电机,就不是这个模型了。本文主要分析由直流电机驱动的小车—倒立摆系统。小车倒立摆系统是检验控制方式好坏的一个典型对象,其特点是高阶次、不稳定、非线性、强耦合,只有采取有效的控制方式才能稳定控制. 在忽略空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车忽然均匀质杆组成的系统,如下图所示: 图中F 是施加于小车的水平方向的作用力,x 是小车的位移,φ是摆的倾斜角。若不给小车施加控制力,倒摆会向左或向右倾斜,控制的目的是当倒摆出现偏角时,在水平方向上给小车以作用力,通过小车的水平运动,使倒摆保持在垂直的位置。即控制系统的状态参数,以保持摆的倒立稳定。 M 小车的质量 0.5Kg m 摆杆的质量 0.2Kg X φ F M 图1 直线一级倒立摆系统 θ
孙维刚教学思想之学法指导初探精品文档5页
孙维刚教学思想之学法指导初探 1 引言 孙维刚老师带领的班级,全班40人,38人达重点线,22人考入清华、北大(达55%),100%上大学,破天荒地创造了“真实的神话”,一直是教育界崇拜学习的对象!孙维刚因而被中国教育界誉为传奇教师,有“中国数学教育之父”的称号。孙维刚的教育教学思想内容十分丰富,在这里本文只是就他在数学教学中所体现的学法指导方面来进行探讨,以有助于了解和把握数学教学与指导学生学习的方向。 2 孙维刚教学法分析 在教学中,孙老师让学生主动学习、探索学习,做学习的主人,积极思考与老师互动教学。教学中他想尽办法培养和激发学生学习的欲望和探索精神,让学生积极参与教学,充分思考,锻炼多向思维,鼓励学生有自己的思想和独到见解。他觉得做题不能题海战术,要精简更要经典,培养学生的发散思维和聚合思维,使学生觉得学习数学是极大的轻松、快乐和富有成就感。 孙老师最善于归纳总结,他把中学数学总结出四个“大规律”、十五个“中规律”、还有三四十个“小规律”,他把知识形成网络,四通八达,真是“条条大路通罗马”,使得中学数学的学习变得简单有趣,易于掌握。更重要的是,他将这种方法迁移到各学科的学习,给予学生的是一种可持续发展的能力。具体学法指导如下。 1)引导学生自己动手证明每个公式、每个定理,独立做题,善于归纳总结。
2)在课堂学习中,他营造民主的学习氛围,让学生对知识进行质疑和挑战,与老师互动、与同学互动,训练发达思维,真正做课堂的主人,以便促进学生之间聪明才智的相互影响。 3)时时注意寻找知识之间的联系和规律。 ①世上不存在“没有为什么的事物”。孙维刚常说世上不存在“没有为什么的事物”,他让学生探索其中的奥妙,培养学生的探索精神和创新意识;对知识展开争论,鼓励百花齐放,百家争鸣。 下面举一个例子[1]。在高等数学里,函数级数(ancosnx+bnsinnx)为什么起名为三角级数呢?因为这个级数是以三角函数列1,cosx,sinx,cos2x,sin2x,...,cosnx,sinnx, ...为基础所做成的函数级数。 为什么该数列称作三角函数列呢?是因为数列的项是三角函数sinnx 和cosnx。为什么sinnx和cosnx称作“三角”函数呢?是因为一方面f (x)=sinx和f(x)=cosx符合函数的定义;另一方面,它们是“三角学”里的函数。为什么它们所在的数学分支称作“三角学”?也就是说,它们为什么产生于“三角学”中?即这个分支为什么称作“三角学”呢? “三角学”的建立产生于测量计算的需要,面临“解三角形”的课题,故而称之“三角学”,尽管它后来的发展已远远超出“解三角形”的范围。 问到何时为止呢?问到1+2=3时才罢休。这样追根溯源的结果是什么?一是八方联系,导致浑然一体。原以为离散的知识,原来都有条不紊地联系在一起。二是通过追问,可以找出事物之间的联系,有助于形成学生的联想习惯和联想能力,形成知识网络。三是渐渐形成一种好的学习方
苏教版生物七1-2-2探索生命的方法 教案设计
第二章第二节探索生命的方法 【教学目标】 知识目标:分析科学探究故事,说出科学探究的一般方法 尝试理解提出问题、作出假设、确定变量及设计对照实验在科学探究 中的重要作用 能力目标:初步学会运用科学探究的方法解决生活中的简单问题 情态目标:感受探究的快乐,体验集体合作的乐趣;培养实事求是、一丝不苟的严谨科学态度。 【教学重点】 掌握科学探究的一般方法,体验科学探究过程,学会确定实验变量、设计对照实验。 【教学难点】 提出问题、做出假设、确定变量及设计对照实验 【教学流程】 一、导入新课 图片:显微镜及实验室一些常用探究器具。让学生辨认 师:经过前几节课的学习,我们学会了使用显微镜和制作临时拨片标本,使我们看到了肉眼看不到的微观世界,扩大了眼界,开阔了视野。但要学好生物学,光有这些还不够,我们还必须掌握探索生命的方法--------科学探究。 二、学习新课 案例一:已知案例 出示鼠妇图片,请学生回忆探究实验:影响鼠妇分布的环境因素 学生回答过程中注意引导学生:提出了什么问题?做出了怎样的假设?怎么验证的? 师:生产和生活中有很多令人疑惑不解的问题,善于发现、提出问题,是进行科学探究的第一步。
过渡:出示图片:秋天开放的菊花、食物在冰箱冷藏;发霉的橘子 引导学生对这些常见的生活现象提出感兴趣的问题 案例二:腐肉生蛆 出示图片:腐肉生蛆,让学生提出问题 ●提出问题:蛆是从哪儿来的? ●作出假设:蛆是由腐烂的肉变来的。(蛆是由苍蝇的卵孵化来的) (经过前面的训练,学生基本可以提出具有探究意义的问题,但是作出假设时,可能需要教师引导。当然也有的同学基于生活经验或已有的知识可以做出假设) 师强调:在进行科学探究时,对问题要做出合理的假设,绝不可以毫无根据的猜想。 活动一:自主学习教材P28页4-5段 思考,交流:什么是变量? 本实验的变量是什么? 如何设置对照? ●实验设计—确定变量 出示实例:例:探究光对鼠妇生活的影响。(变量是光) 例:探究水对鼠妇生活的影响。(变量是水) 例:探究温度对种子萌发的影响。(变量是温度) 让学生通过一些简单的训练学习如何确定变量。进而发现本实验的变量:是否与外界接触 ●实验设计-----设计对照 让学生在自主学习的基础上,说出“腐肉生蛆”实验的实验步骤,在这个过程中让学生体会:实验组和对照组的设计,体会单一变量原则。
连接体问题含答案
牛顿第二定律的应用――― 连接体问题 【自主学习】 一、连接体与隔离体 两个或两个以上物体相连接组成的物体系统,称为 。如果把其中某个物体隔离出来,该物体即为 。 二、外力和内力 如果以物体系为研究对象,受到系统之外的作用力,这些力是系统受到的 力,而系统内各物体间的相互作用力为 。 应用牛顿第二定律列方程不考虑 力。如果把物体隔离出来作为研究对象,则这些内力将转换为隔离体的 力。 三、连接体问题的分析方法 1.整体法:连接体中的各物体如果 ,求加速度时可以把连接体作为 一个整体。运用 列方程求解。 2.隔离法:如果要求连接体间的相互作用力,必须隔离其中一个物体,对该物体应用 求解,此法称为隔离法。 3.整体法与隔离法是相对统一,相辅相成的。本来单用隔离法就可以解决的连接体问 题,但如果这两种方法交叉使用,则处理问题就更加方便。如当系统中各物体有相同的加速度,求系统中某两物体间的相互作用力时,往往是先用 法求出 ,再用 法求 。 【典型例题】 例1.两个物体A 和B ,质量分别为m 1和m 2,互相接触放在光滑水平面上,如图所示, 对物体A 施以水平的推力F ,则物体A 对物体 B 的作用力等于( ) A. F m m m 211+ B.F m m m 2 12 + C.F D. F m 2 1 扩展:1.若m 1与m 2与水平面间有摩擦力且摩擦因数均为μ则对B 作用力等于 。 2.如图所示,倾角为α的斜面上放两物体m 1和m 2,用与斜面 平行的力F 推m 1,使两物加速上滑,不管斜面是否光滑,两物体 之间的作用力总为 。 例2.如图所示,质量为M 的木板可沿倾角为θ的光滑斜面下滑, 木板上站着一个质量为m 的人,问(1)为了保持木板与斜面相 班级 姓名
20112515直线一级倒立摆机理建模
上海电力学院课程设计报告 课名:自动控制原理应用实践 题目:倒立摆控制装置 院系:自动化工程学院 专业:测控技术与仪器 班级:2011151班 姓名:马玉林 学号:20112515 时间:2014年1月14日
倒立摆系统按摆杆数量的不同,可分为一级,二级,三级倒立摆等,多级摆的摆杆之间属于自有连接(即无电动机或其他驱动设备)。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。通过对倒立摆的控制,用来检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力。 倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。 1.1 倒立摆的控制方法 倒立摆系统的输入来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。 本次设计中我们采用其中的牛顿-欧拉方法建立直线型一级倒立摆系统的数学模型,然后通过开环响应分析对该模型进行分析,并利用学习的古典控制理论和Matlab /Simulink仿真软件对系统进行控制器的设计,主要采用根轨迹法,频域法以及PID(比例-积分-微分)控制器进行模拟控制矫正。 2 直线倒立摆数学模型的建立 直线一级倒立摆由直线运动模块和一级摆体组件组成,是最常见的倒立摆之一,直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,在小车上装载不同的摆体组件。 系统建模可以分为两种:机理建模和实验建模。实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对象并通过传感器检测其可观测的输出,应用数学手段建立起系统的输入-输出关系。这里面包括输入
苏教初中生物七上《探索生命的方法》word教案 (1)
探索生命的方法 教学内容探索生命的方法(1课时) 1、举例说出科学探究的一般方法,并体验其过程。 教学目标 2、认同实事求是的重要性,确立实事求是的科学态度。 教学重点举例说出科学探究的一般方法,并体验其过程。 教学难点尝试确定实验变量,设计对照实验。 教学策略启发教学、自主学习、小组合作、展示交流。 课时安排1课时 二次备课 一、导入 首先由学生阅读书本上的内容,感受书本对于“蛆从哪儿来”这 样问题的探究过程,并讨论科学探究方法的一般步骤 二、教学过程 教师总结:科学探究的一般过程包括: 提出问题 作出假设 实验(包括制定计划,实施计划) 得出结论 表达与交流 2 探究:蚯蚓在什么样的物体表面爬得快 学生根据书本提示总结出这个问题探究的过程,并实施其过 程。 提出问题:蚯蚓在什么样的物体表面爬得快? 作出假设:蚯蚓在硬纸板上爬得快或蚯蚓在玻璃板上爬得 快。 实验:(分工合作) (1)制作计划:
选面积一样的玻璃板和硬纸板,大小差不多的蚯蚓,使蚯蚓分别在玻璃板和硬纸板上爬动,观察记录现象。 (2)实施计划: 及时记录所观察到的现象 得出结论:蚯蚓在硬纸板上爬时可听到沙沙的声音,在玻璃板 上时只见身体在舒缩,变粗,变细,却不 能前进,所以说在硬纸板上爬得快。 表达与交流:实验出现这种结论是正确的,因为在硬纸板上 蚯蚓的刚毛在起支撑和固定的作用,移动 容易,而在玻璃板上由于玻璃光滑,刚毛 无法支撑和固定身体,移动比较困难。 3 从这两个探究过程可以看出所作的实验只有实验变量是不同 的,其他的量都相同,这样的实验是对照实验 4 以书本自我评价来巩固这堂课的知识 作业设计 板书设计 课后反思
(完整版)高中物理连接体问题精选(含答案),推荐文档
题型一 整体法与隔离法的应用例题1 如图所示,光滑水平面上放置质量分别为m 和2m 的四个木块,其中两个质量为m 的木块间用一不可伸长的轻绳相连,木块间的最大静摩擦力是μmg 。现用水平拉力F 拉其中一个质量为2 m 的木块,使四个木块以同一加速度运动,则轻绳对m 的最大拉力为A 、5mg 3μ B 、4mg 3μ C 、2mg 3μ D 、 mg 3μ变式1 如图所示的三个物体A 、B 、C ,其质量分别为m 1、m 2、m 3,带有滑轮 的物体B 放在光滑平面上,滑轮和所有接触面间的摩擦及绳子的质量均不 计.为使三物体间无相对运动,则水平推力的大小应为F =__________ 2.如图,质量为2m 的物块A 与水平地面的摩擦可忽略不计,质量为m 的物块B 与地面的 动摩擦因数为μ,在已知水平推力F 的作用下,A 、B 做加速运动,A 对B 的作用力为多少? 3.如图所示,质量为M 的木箱放在水平面上,木箱中的立杆上套着一个质量为m 的小球, 开始时小球在杆的顶端,由静止释放后,小球沿杆下滑的加速度为a = g ,则小球在下滑的2 1过程中,木箱对地面的压力为多少?4.两个质量相同的小球用不可伸长的细线连结,置于场强为E 的匀强电场中,小球1和小 球 2均带正电,电量分别为q 1和q 2(q 1>q 2)。将细线拉直并使之与电场方向平行,如图所示。 若将两小球同时从静止状态释放,则释放后细线中的张力T 为(不计重力及两小球间的库 仑力)( ) A . B . 121()2 T q q E =-12()T q q E =-C . D .121()2T q q E =+12()T q q E =+5.如图所示,光滑水平面上放置质量分别为m 、2m 和3m 的三个木块,其中质量为2m 和3m 的木块间用一不可伸长的轻绳相连,轻绳能承受的最大拉力为F T 。现用水平拉力F 拉质量为3m 的木块,使三个木块以同一加速度运动,则以下说法正确的是( )A .质量为2m 的木块受到四个力的作用B .当F 逐渐增大到F T 时,轻绳刚好被拉断C .当F 逐渐增大到1.5F T 时,轻绳还不会被拉断 D .轻绳刚要被拉断时,质量为m 和 2m T 1 2-图E 球1 建议收藏下载本文,以便随时学习!
一级倒立摆物理建模、传递函数和状态方程的推导
一级倒立摆物理建模和传递函数的推导 设定: M 小车质量 m 摆杆质量 b 小车摩擦系数 l 摆杆转动轴心到杆质心的长度 I 摆杆惯量 F 加在小车上的力 x 车位置 φ 摆杆与垂直向上方向的夹角
图1、2是系统中小车和摆杆的受力分析图。其中,N 和P 为小车与摆杆相互作用。 分析小车水平方向所受的合力,可以得到以下方程: N x b F x M --=? ?? (1) 由摆杆水平方向的受力进行分析可以得到下面等式: )sin (22 θl x dt d m N += (2) 即: θθθθsin cos 2 ?? ???-+=ml ml x m N (3) 把这个等式代入式(3)中,就得到系统的第一个运动方程: F ml ml x b x m M =-+++?? ????θθθθsin cos )(2 (4) 对摆杆垂直方向上的合力进行分析,可以得到下面方程: )cos (2 2 θl dt d m mg P =- (5) θθθθcos sin 2 ?? ?--=-ml ml mg P (6) 力矩平衡方程: ? ?=--θθθI Nl Pl cos sin (7)
此方程中力矩的方向,由于φπθ+=,θφcos cos -=,θφsin sin -=,故等式前面有负号。 合并这两个方程,约去 P 和N ,得到第二个运动方程: θ θθcos sin )(2 ? ???-=++x ml mgl ml I (8) 设θ =π +φ, 假设φ 与1(单位是弧度)相比很小,即c <<1,则可以进行近似处理:1cos -=θ,φθ-=sin ,0)(2 =dt d θ。用u 来代表被控对象的输入力F ,线性化后两个运动方程如下: { u ml x b x m M x ml mgl ml I =-++=-+? ?? ? ?? ???φφφ)()(2 (9) 假设初始条件为0,对式(9)进行拉普拉斯变换: { ) ()()()()()()()()(22222s U s s ml s s bX s s X l M s s mlX s mgl s s ml I =Φ-++=Φ-Φ+ (10) 由于输出为角度φ ,求解方程组的第一个方程,可以得到: )(])([)(22s s g ml ml I s X Φ-+= (11) 或 mgl s ml I mls s X s -+=Φ2 22)()()( (12) 令? ?=x v ,则有: mgl s ml I ml s V s -+=Φ22)()()( (13) 把上式代入方程组的第二个方程,得到:
“五、四、三自主式学法指导”教学模式初探
“五、四、三自主式学法指导”教学模式初探 在全面推进素质教育的进程中,学生在课堂教学的主体地位,越来越得到人们的重视。本人就“自主式学法指导”的实践,撰文以飨同仁。 一、基本结构程序 “五、四、三自主式学法指导”教学模式是把课堂教学分成五个阶段:复习铺垫,引入新知;自学探究,内化新知;反馈练习,强化新知;当堂作业,巩固新知;全课小结,构建新知。四次练习是指铺垫性练习、尝试性练习、反馈性练习、达成性练习。三个环节是指自学尝试,讨论交流,点拨归纳。 1.复习铺垫,引入新知。 这一教学过程是新知识的生长点,是认知的起点和依据,是形成新知结构的根基。教师必须根据知识之间的内在联系,选准为新知识提供最佳关系的旧知识,设计铺垫性练习,唤起学生的原认知。为“同化”“顺应”“新知准备知识基础和思维导向”,采用实物、故事、游戏、设疑等形成,为学生创设富有激发性的教学情境,诱发学生主动探知的动因,使学生一开始就进入自觉学习的状态。这一过程是学生自主学习新知的前提。 2.自学探究,内化新知。 这一过程是学生在教师的启发引导,通过积极主动地自学尝试,自己发现问题——小组探究讨论问题——全班合作交流解决问题。这一过程是教学的关键,教师要把握探索性问题的“度”,要有意识地设置问题情境,激发学生的认识冲突,这是学生心理发展的动力。学生在探索问题的过程中会遇到这样或那样的困难,也会产生种种情感。对教师要注意因势利导,不断加强学法的点拨,为学生思维“铺路架桥”,帮助学生克服认知上的障碍,强化积极的情感,坚定克服困难的信心,建立良好的数感。 3.反馈练习,强化新知。 这一教学过程既是了解学生对新知掌握的情况和检测掌握运用学法的效度,又是形成技能技巧的训练。教师要根据本节课的教学目标,重点、难点设计好练习,练习的内容要面向全体学习难易适度有趣味性,习题既要有强化新知的单一基础题,又要有动手操作的实践题;既要有突破难点的针对题,又要有克服思维定势的变式题,既要有以新带旧的综合题,又要有一题多解的开放题。力求学生通过不同形式,多个层次的练习,认知得到强化,思维得到发展。 4.当堂作业,巩固新知。 这一教学过程是达成目标的主要环节。为了及时了解每个学生的学习效果。必须让学生在课内完成一定量的作业。根据实际,作业内容要充分体现因材施教,照顾到不同层次的学生,有一定的弹性。作业完成后,4人小组的学生互批、互
七年级生物上册《探索生命的方法》教案 苏教版
探索生命的方法 1设计依据与思路 本设计是江苏版七上第二章《探索生命》第二节《探索生命的方法》的内容,一个课时。 课标分析:本章内容与一般的概念知识不同,课标建议,让学生理解重要概念科学探究的方法,教师应积极提供机会和情境,让学生应积极参与、动手、动脑,亲身经历观察、实验、探究等过程,在实践中参与探究的完整过程,树立实事求是的科学态度。 教材地位:本节介绍了重要概念科学探究的一般方法,并让学生亲身参与和经历科学探究的一般过程,进而使学生初步理解科学探究的一般方法,为以后的探究活动提供系统的探究思路。 学情分析:初一的学生好奇心强,探究兴趣浓厚,但实践经验和生活经验不足,缺乏对事物本质的细致探究,需要教师积极创设丰富的探究情境,最大可能地提供探究的空间和机会,培养学生的探究意识,让学生充分享受探究的乐趣,为今后的自主学习提供最大可能性。 设计思路:创设丰富的探究情境,层层深入,让学生充分理解和掌握科学探究的一般方法。1.鼓励学生在“青霉素的发现”探索故事中,发现和了解科学家探索中的科学探究的一般过程,初步获得一定的感性认识。2.鼓励学生参与,引导学生走向团队“小弗莱明”的探究“生蛆”之旅,通过分析其过程,获得一定的理性认识,初步理解科学探究的一般过程。即通过不断的设问追问和答疑,让学生参与其中,初步理解提出问题、作出假设、设置对照实验、控制唯一变量和重复实验等具体方法以及在科学探究中的重要作用,同时培养学生在探索中所必备的精神和素养。3.联系生活,关注社会焦点。通过小组合作,体验探究环节,在“蚯蚓对不同的两种刺激有怎样的反应”的探究情境中,让学生体验一次探究的全过程,通过探究过程中蚯蚓在自来水和洗洁精稀释液不同刺激下的两种反应状态的对比,能使学生理解实验变量的含义并初步学会设计对照实。初步掌握科学探究的一般方法。4.雁过留声,适时总结。5.创设新情境进行拓展与迁移:关注学生的兴趣和个性,沿着科学家的足迹,创设课外拓展新情境,探究“光对植物的生长有没有影响”,为部分学生的科学探究能力提供再提升和发展的空间,进一步激发学生学习和探究的热情。 2 教学目标 2.1 知识目标 1.分析科学探究故事,说出科学探究的一般过程。 2. 从“小弗莱明”团队的具体探究情境(生蛆)展示和学生参与中,初步理解提出问题、作出假设、设置对照实验和控制唯一变量的具体方法和在科学探究中的重要作用。 3. 在“蚯蚓对不同的液体刺激有怎样的反应”的探究情境中,让学生亲身体验和感悟科学探究的一般过程。 2.2 能力目标 1.通过鼓励学生在“青霉素的发现”探索故事中,发现和了解科学探究的 一般过程,提高学生善于观察,处理信息,分析和概况总结的能力。 2.从“小弗莱明”团队的具体探究情境(生蛆)展示中,通过不断的设问 答疑,提高学生的分析、推理、质疑、评价和理解科学探究的能力。 3.在提供多种生活情境中,初步培养学生提出问题的能力。 4.通过小组合作,体验探究环节,在“蚯蚓对不同的两种液体刺激有怎样的反应”的探究情境中,在培养与他人合作能力,并初步学会运用科学探究的方法解决生活的社会关注的简单问题。 5.在创设的课外拓展新情境中,培养和发展学生的科学探究能力。
连接体问题专题详细讲解
连接体问题 一、连接体与隔离体 两个或两个以上物体相连接组成的物体系统,称为连接体。如果把其中某个物体隔离出来,该物体即为隔离体。 二、外力和内力如果以物体系为研究对象,受到系统之外的作用力,这些力是系统受到的外力,而系统内各物体间的相互作用力为内力。应用牛顿第二定律列方程不考虑内力。如果把物体隔离出来作为研究对象,则这些内力将转换为隔离体的外力。 三、连接体问题的分析方法 1.整体法连接体中的各物体如果加速度相同,求加速度时可以把连接体作为一个整体。运用牛顿第二定律列方程求解。 2.隔离法如果要求连接体间的相互作用力,必须隔离其中一个物体,对该物体应用牛顿第二定律求解,此法称为隔离法。 3.整体法与隔离法是相对统一,相辅相成的。本来单用隔离法就可以解决的连接体问题,但如果这两种方法交叉使用,则处理问题就更加方便。如当系统中各物体有相同的加速度,求系统中某两物体间的相互作用力时,往往是先用整体法法求出加速度,再用隔离法法求物体受力。 简单连接体问题的分析方法 1.连接体:两个(或两个以上)有相互作用的物体组成的具有相同大小加速度的整体。 2.“整体法”:把整个系统作为一个研究对象来分析(即当做一个质点来考虑)。 注意:此方法适用于系统中各部分物体的加速度大小方向相同情况。 3.“隔离法”:把系统中各个部分(或某一部分)隔离作为一个单独的研究对象来分析。 注意:此方法对于系统中各部分物体的加速度大小、方向相同或不相同情况均适用。 4.“整体法”和“隔离法”的选择 求各部分加速度相同的连结体的加速度或合外力时,优选考虑“整体法”;如果还要求物体之间的作用力,再用“隔离法”,且一定是从要求作用力的那个作用面将物体进行隔离;如果连结体中各部分加速度不同,一般都是选用“隔离法”。 5.若题中给出的物体运动状态(或过程)有多个,应对不同状态(或过程)用“整体法”或“隔离法”进行受力分析,再列方程求解。 针对训练 1.如图用轻质杆连接的物体AB沿斜面下滑,试分析在下列条件下,杆受到的力是拉力还是压力。 (1)斜面光滑;
体育课学法指导研究初探--张素珍
体育课学法指导研究 体育教学包括教师的“教”和学生的“学”两个方面,而学生是学习的主体,因此,体育教学在搞好教法的同时,更应重视学生学法指导的研究,针对学生在学习过程中存在的问题、研究、制定一些有效措施,帮助和指导他们掌握学习方法,使学生乐学、会学,从而不断提高教学效果。 一、体育学法指导的特殊性 体育学法指导主要是指教师通过一定的途径,对学生进行体育学习方法的传授、诱导、诊治,使学生掌握科学的体育学习方法,并灵活运用到体育学习的锻炼中去,逐步形成较强的自学、自评、自练的能力。 学法指导是一项系统工程,学法的形成是一个由间到繁,由易到难,由表及里的渐进过程,每一个具体学习方法的形成与发展,都呈现出连续性,阶段性和递进性,并将经历感知——模仿——内化——应用与创新四个阶段,四个阶段的心理水平是不同的,处于不同的心理层次上,以感知为起点,以灵活运用与创新为目标。 二、学法指导的途径 学法指导的途径是多种多样的,但主要的途径仍然是课堂教学。此外,教师还可开设专门的学法指导课,结合教材的特点进行指导。也可以在教师的指导下,由学生进行总结,还可以召开学生的学法经验交流会。 三、学习方法指导 1、教学点拨。教学过程中,当学生每学习或完成一项动作练习后,教师有意识地指导进行学习方法的分析总结,或在学习过程中发现学生运用了某一成功的学习方法就及时给予肯定和归纳等,这样尽力使学生增加重视学习方法的意识,培养学生学习能力。 2、设置情境。就是设置学法指导活动的场面或环境,把体育学习的方法形象而直观的展示出来。体育教学一个最显著的特点就是直观教学,教师要充分利用各种教具、图片、录像等现代化教学手段,设置情境,向学生展示学习方法,让学生身临其境,心受其境,不断地得到感化和启示。 3、想练结合。教师在教完一个动作技术后,要让学生自己去体会,尝试成败,在教师的指导下,给学生自由想象的时间和空间,发展体育能力。 4、根据存在问题进行指导。在教学过程中,对于学生表现出来的弱点和存在问题,是教师指导的重点。要让学生多动脑筋,较难的技术动作和关键的地方要组织学生讨论,使每个学生都能积极思维,使其达到解决问题、掌握知识的能力。 5、提供学生展示的舞台。在教学过程中,教师要采用多种方法,为学生创造更多的实践机会,按性格、兴趣、体能、特长及学生间的关系自由组合,互帮互学,提供学生自我表现的舞台。 四、体育各教学环节的学法指导 学生的学习环节主要包括视听环节、自学自练环节和总结评价环节等,体育教学应加强这些环节的学法指导。 1、视听环节 视听环节的指导,首先要排除外界环境的干扰和影响。因为体育教学的一个特点是在室外进行,容易受外界环境的干扰和影响。因此应加强组织管理,保证良好的教学秩序,引导学生的思维活动与身体活动和教学内容紧密结合起来,