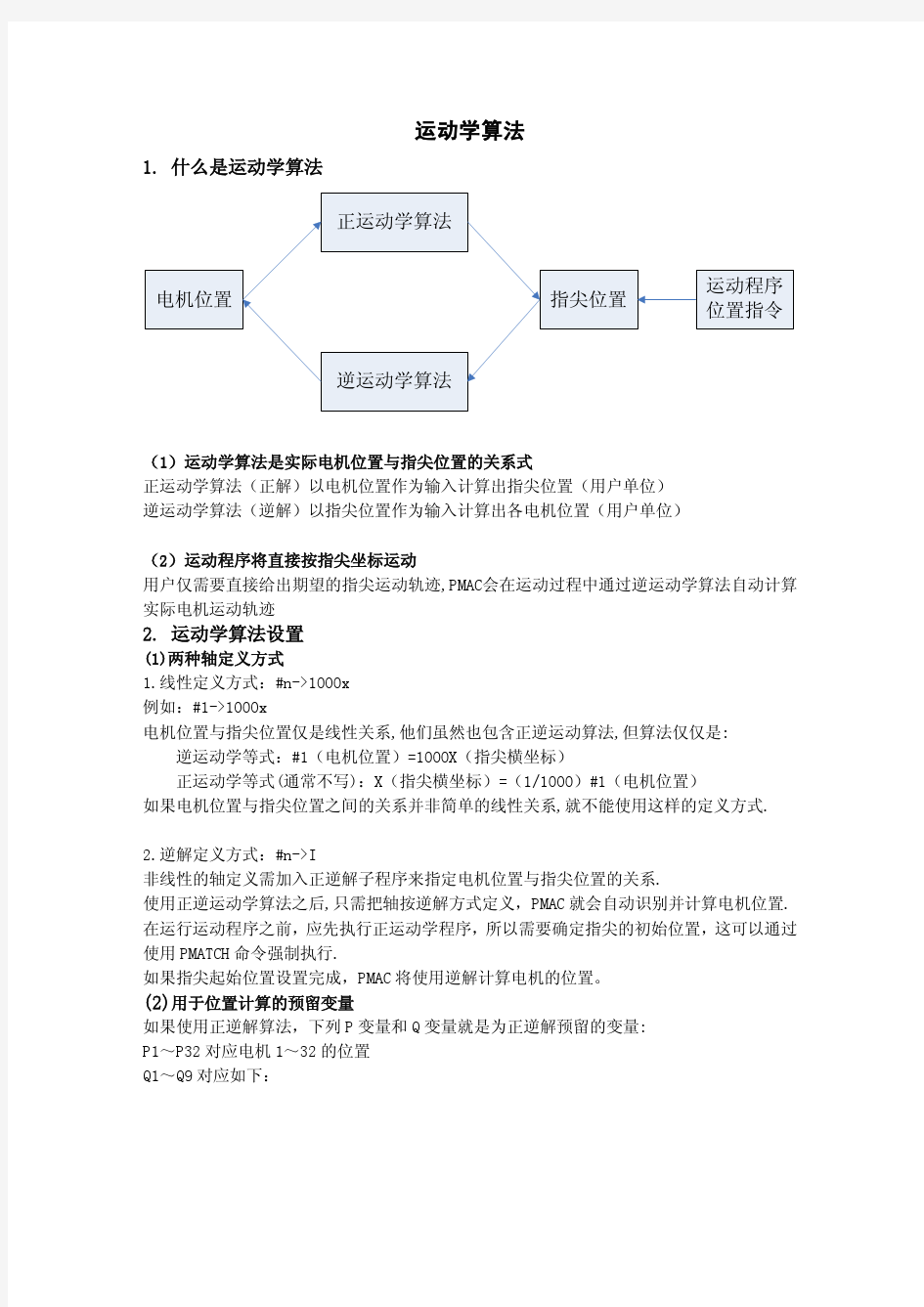
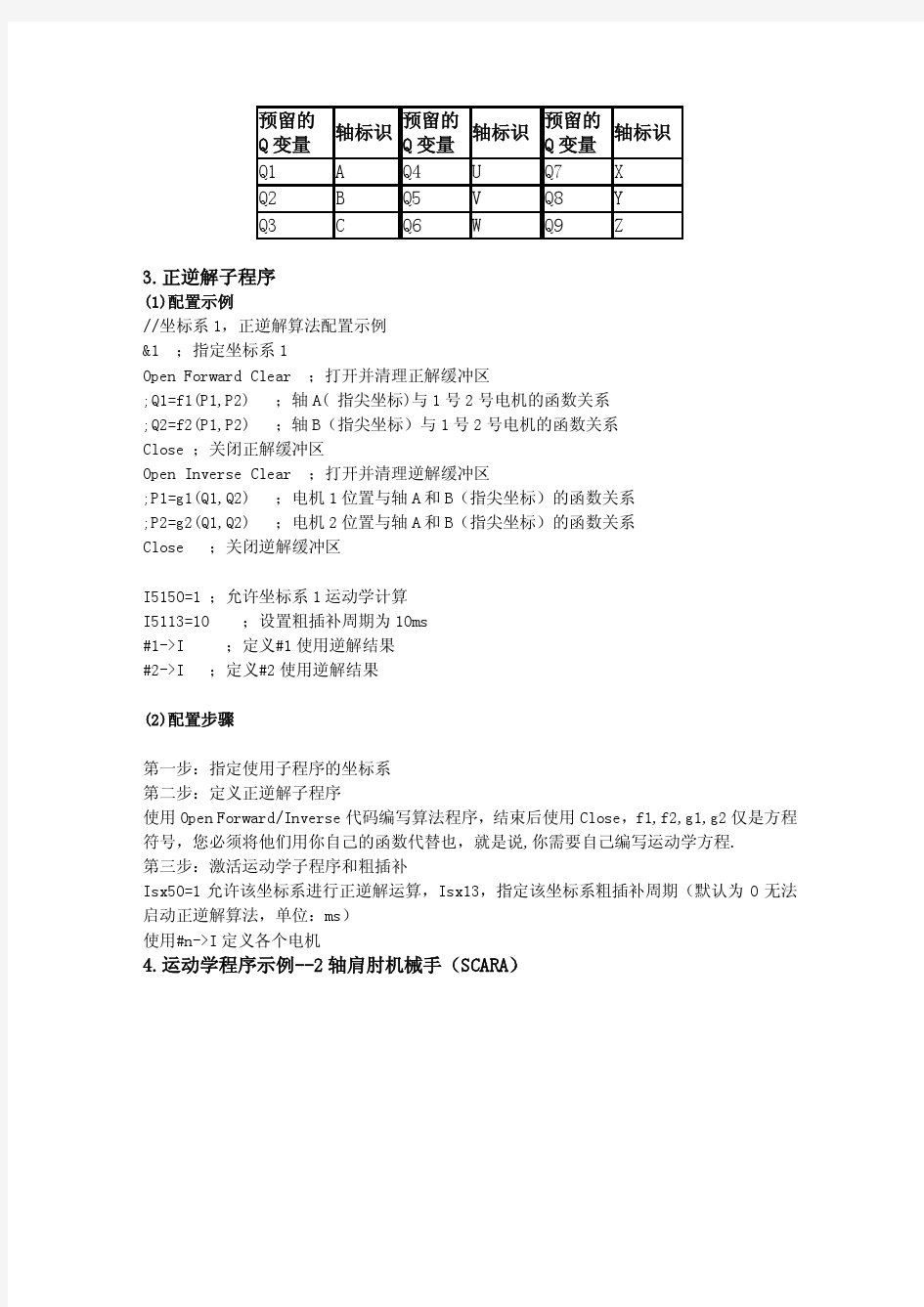
运动学算法
高中物理运动学公式总结
高中物理运动学公式总结 The Standardization Office was revised on the afternoon of December 13, 2020
高中物理运动学公式总结 一、质点的运动——直线运动。 1)匀变速直线运动。 1、平均速度;t x V =定义式平均速率;t s V = 2、有用推理ax Vo Vt 222=- 3、中间时刻速度;202V Vt V Vt +==平 4、末速度Vt=V0+at 5、中间位置速度2 2220Vt V Vx += 6、位移 t 2t 2a t 0t t 2V V V s =+==平 7、加速度t V Vt a 0 +=(以V0为正方向,a 与V0同向[加速]a ?0,反向则a <0) 8、实验推论;S1-S2=S3-S2=S4-S3= =?x=a t 2 9、初速度为0n 个连续相等的时间内s 的比;s1:s2:s3 :Sn=1:3:5 :(2n-1) 10、初速度为0的n 个连续相等的位移内t 之比; t1:t2:t3 :tn=1:(12-0):(23-): :(1--n n ) 11、a=t n m Sn Sm 2--(利用上个段位移,减少误差---逐差法) 12、主要物理量及单位:初速度V0= s m ;加速度a=s m 2;末速度Vt= s m 1s m =h k m 注; 1平均速度是矢量, 2物体速度大,加速度不一定加大 2)自由落体运动 1初速度V0=0 2末速度Vt=gt 23下落高度)位置向下计算从00(22V g h t = 4推论t 2V =2gh 注; 1自由落体运动是初速度为0的匀加速直线运动,遵循匀变速直线运动规律。
运动学问题的处理方法
运动学问题的处理方法 怎样合理地选用运动学规律解题呢?首先要根据题意找准研究对象,明确已知和未知条件,复杂的题可画出运动过程图,并在图中标明此位置和物理量。再根据公式特点选用适当的公式或推论解题。如果题目涉及不同的运动过程,则重点要寻找各段运动的速度、位移、时间等方面的关系。在解决这类问题时如果巧用图像法、巧选参考系等方法会使问题变得简单易解,这需要同学们在今后的实践中逐步体会。 一、 巧用图像解决运动学问题 运用s-t 和v-t 图像时,要理解图像的正确含义,看清坐标轴的物理意义。在具体解决有些问题时,如果能够根据题意画出图像,解题就方便了。 例1一宇宙空间探测器从某一星球的表面垂直升空,宇宙探测器升到某一高度,发动机关闭,其速度随时间变化如图1所示, ⑴升空后8秒,24秒,32秒时的探测器运动速度分别是多少? ⑵探测器所能达到的最大高度是多少? ⑶该行星表面的重力加速度是多少,上升加速过程中的加速度是多少? 解析:⑴由图像可知升空后,8s,24s,32s 的速度分别是64m/s,0,-32m/s ⑵探测器达到的高度,可以从0—24秒内图线与坐标轴围成的面积表示, m s 7682 24 64=?= ⑶探测器上升加速过程的加速度21/88 64 s m a == 关闭发动机后仅探测器仅在重力作用下运动,其加速度即为该星球的重力加速度, 则由图像可知222/4/24 640s m s m t v a -=-=??= 负号表示其方向与运动方向相反。 例2 一个质点沿直线运动,第1s 内以加速度a 运动,位移s 1=10m ,第2s 内以加速度-a 运动,第3s 、第4s 又重复上述的运动情况,以后如此不断地运动下去,当经历T = 100s 时,这个质点的位移是多少? 解析:画出质点运动的v –t 图像,如图2所示,由于每1s 内的加速度相等,即每1s 内v-t 图线的斜率相等,因此,图像呈 -32 O 8 16 24 32 32 64 v/(m.s -2) s/t 图1 图2 V t v 0 O
iNVENTOR 运动仿真分析
第1章运动仿真 本章重点 应力分析的一般步骤 边界条件的创建 查看分析结果 报告的生成和分析 本章典型效果图 1.1机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Pro/ engineer 中“机构”模块是专门用来进行运动仿真和动态分析的模块。 PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定
可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。也可创建轨迹曲线和运动包络,用物理方法描述运动。 使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。 如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。 1.2总体界面及使用环境 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图
运动学基本公式运用
运动学基本公式运用 一、选择题 1、做匀加速直线运动的物体的加速度为3 m/s 2,对任意1 s 来说,下列说法中不正确的是( ) A.某1 s 末的速度比该1 s 初的速度总是大3 m/s B.某1 s 末的速度比该1 s 初的速度总是大3倍 C.某1 s 末的速度比前1 s 末的速度大3 m/s D.某1 s 末的速度比前1 s 初的速度大6 m/s 2、a 、b 两个物体从同一地点同时出发,沿同一方向做匀变速直线运动,若初速度不同,加速度相同,则在运动过程中( ) ①a 、b 的速度之差保持不变 ②a 、b 的速度之差与时间成正比 ③a 、b 的位移之差与时间成正比 ④a 、b 的位移之差与时间的平方成正比 A.①③ B.①④ C.②③ D.②④ 3、一小球从A 点由静止开始做匀变速直线运动,若到达B 点时速度为v ,到达C 点时速度为2v ,则AB ∶BC 等于( ) A.1∶1 B.1∶2 C.1∶3 D.1∶4 4、物体的初速度为v 0,以加速度a 做匀加速直线运动,如果要它的速度增加到初速度的n 倍,则物体的位移是( ) A.a v n 2)1(2 02- B.a v n 22 02 C.a v n 2)1(2 0- D.a v n 2)1(2 02- 5、做匀加速运动的列车出站时,车头经过站台某点O 时速度是1 m/s ,车尾经过O 点时的速度是7 m/s ,则这列列车的中点经过O 点时的速度为( ) A.5 m/s B.5.5 m/s C.4 m/s D.3.5 m/s 6、一物体以5m/s 的初速度、大小为2m/s 2 的加速度在粗糙的水平面上匀减速滑行,在4s 内通过的路程为( ) A 、4m B 、6.25m C 、16m D 、以上答案都不对 7、汽车刹车后做匀减速直线运动,最后停下来,在刹车过程中,汽车前半程的平均速度与后半程的平均速度之比是( ) A. 1:)12(+
运动学测量方法
各位同学,大家早上好,今天我们来继续学习运动技术分析与诊断这门课程,在学习本节课之前,我们先来回顾一下,上节课学习的人体运动的运动学分析的主要内容。 复习:一、人体关节的相关概念 二、人体关节运动的基本形式 三、人体运动链的分类 四、人体运动的自由度 一、人体关节的相关概念 关节:骨与骨以结缔组织相连结构成关节。根据连结组织的性质和活动情况,关节可分为不动关节(韧带联合、软骨结合和骨性结合)、动关节(肩、肘、腕、髋、膝、踝关节)和半关节(耻骨联合)。 二、人体关节运动的基本形式 1)角度运动 邻近两骨间产生角度改变的相对转动,称为角度运动。通常有屈、伸和收、展两种运动形态。 2)旋转运动 骨绕垂直轴的运动称为旋转运动,由前向内的旋转称为旋内,由前向外的旋转称之旋外。 三、人体运动链的分类 开放运动链末端呈游离状态,它的某一关节固定,其余各关节产生运动。 如果运动链首尾相连,形成闭合状态,末端无游离的环节,称为闭合运动链。 四、人体运动的自由度 假如物体不受任何限制(约束),它可以在三度空间运动,也既是相对于三个相互垂直轴的平动及绕三个轴的转动,物体有六个自由度。 当把物体某一点固定时,其自由度为三个,这时不能产生平动,只能以三个坐标轴为轴发生转动(可把原点放在固定点)。 当物体的某两点固定时,只有一个自由度,既以两点的连线为轴的转动。
当物体上任意三点固定时,则自由度为零,不产生任何方向的平动和转动。 在前面运动技术分析与诊断中我们所讲的是一些运动学、动力学和肌肉力学的一些理论知识,通过上半程的学习对技术分析有个理论上的知识,在后面的学习中将主要进行的是一些实际的应用操作。那么,今天所要学习的就是运动技术分析与诊断的工作环节以及现场数据采集。 第六章运动技术分析与诊断的工作环节及现场数据采集 第一节运动技术数据的意义 运动技术数据是指从人体运动过程中采集到得能够准确描述其运动状态的相关性息。人体运动与时间、空间相关的信息称之为运动学数据;人体运动与作用力、时间相关的信息称之为动力学数据。 一、运动学数据对运动技术的意义 运动学数据包括关节位置和关节角度、位移和角位移、速度和角速度、加速度和角加速度。 1)关节位置和关节角度 人体关节位置和关节角度数据可以准确描述人体运动的姿势。 A.关节位置 人体运动系统的支架是由骨骼和关节组成的一种链状结构,当这种链状结构的枢纽位置(关节位置)发生变化时,便会引起整个支架的形态发生变化。因此,人体运动时身体姿势可以看成是由各个关节在空间位置决定的。 图中显示了关节位置与动作姿态相关的情况。从图中可以看出,当人体任何一个关节点的位置发生变化时,都必然会引起动作姿态发生变化;反之,当人体动作姿态发生变化时,也必然会伴随关节位置的变化。 B.关节角度 人体每个关节的角度决定相邻两个运动环节之间的相互关系,关节角度数据直接描述动作姿态中每个关节的伸展和弯曲状况。在分析评价运动技术姿势时,关节角度也是一个重要的指标。 2)位移和角位移 A.位移 人体动态运动过程可以看成是由一系列有序的静态姿势所组成,当人体从一个姿势连续变化到另一个姿势时,肢体各部位的位置会发生一系列的连续变化,位置变化的距离称之为位移。 我们以100米途中跑时人体总重心的位移情况为例,通过运动员途中跑的影像资料求出途中跑每个瞬时的总重心位置坐标,便可以在坐标中做出途中跑人体
高考运动学解题方法总结
匀变速直线运动的规律及方法 2.【2016·全国新课标Ⅲ卷】一质点做速度逐渐增大的匀加速直线运动,在时间间隔t 内位移为s ,动能变为原来的9倍。该质点的加速度为 A . 2 s t B . 2 32s t C . 2 4s t D . 2 8s t 【答案】A 【解析】设初速度为1v ,末速度为2v ,根据题意可得22 1211922 mv mv ? =,解得213v v =,根据0+v v at =,可得113+v v at =,解得12at v = ,代入2112s v t at =+可得2s a t =,故A 正确。 8.(多选)对于如图所示的情境,交通法规定“斑马线礼让行人”,否则驾驶员将受到罚款200元扣除3分的处罚。若以 匀速行驶的汽车即将通过路口,有行人正在过斑马线,此时汽车的前端距停车线12m ,该车减 速时的加速度大小为 ,下列说法中正确的是( ) A. 在距停车线 处才开始刹车制动,汽车前端恰能止于停车线处 B. 驾驶员立即刹车制动,则至少需汽车才能停止 C. 若经后才开始刹车制动,汽车前端恰能止于停车线处 D. 若经 后才开始刹车制动,汽车前端恰能止于停车线处 【来源】湖南省(长郡中学、株洲市第二中学)、江西省(九江一中)等十四校2018届高三第一次联考物理试题 【答案】 BC 【解析】AB 、若汽车做匀减速运动,速度减为零的时间为 ,在t 时间内运动过的位移为: ,故A 错误;B 正确; CD 、若车恰好停在停车线处,则匀速运动的时间为 ,故C 正确;D 错误; 综上所述本题答案是:BC 10.ETC 是日前世界上最先进的路桥收费方式,它通过安装在车辆挡风玻璃上的车载电子标签与设在收费站ETC 通道上的微波天线进行短程通信,利用网络与银行进行后台结算处理,从而实现车辆不停车就能支付路桥费的目的.2015年我国ETC 已实现全国联网,大大缩短了车辆通过收费站的时间.假设一辆汽车以10m/s 的速度驶向收费站,若进入人工收费通道,它从距收费窗口20m 处开始减速,至窗口处恰好停止,再用10s 时间完成交费;
运动学矢量法一般解题方法(修改稿)
运动学概念及矢量法解题一般方法 (132492629群主) 运动学是定律描述物体运动状态和过程的数学理论。 学生在学习运动学知识时,一定要掌握一般解题方法;在掌握一般解题方法后,再学习一些技巧;而不要反过来,否则,技巧越多,需要记忆的越多,最后负担过重,弄巧成拙。 下面,我讲讲运动学解题的基本方法。 一、 基本概念 1、 矢量 位移、速度、加速度,都是矢量,因为它们都有大小和方向。 2、 位置矢量 由坐标原点向位置点作有向线段,如右图,O A 、OB 都 是位 置点A 、B 的位置矢量。 位置矢量有大小,有方向。如O A ,大小就是OA 的长度, 方向 就是由O 指向A 。 3、 位移 一段时间内质点位置矢量的变化量,就是位移。如右图 中, AB 就是位移矢量。 位移是矢量,既有大小,又有方向。大小,就是起点至终点的(直线)距离;方向,就是起点朝着终点的指向。 位移,就是一条起点指向终点的线段。 【点睛】位移只与两点有关:起点,终点。
前面说过,位移是有方向的。通常,方向要事前进行设定。如上图,向右的方向(数轴方向)被设定为正方向。 左图Δx = x 2 – x 1 > 0,表示物体位移方向与数轴方向一致;右图Δx = x B – x A < 0,表示物体位移方向与数轴方向相反。 4、 速度 速度是矢量,既有大小,又有方向。 从公式可以看出,速度的方向,就是位移方向。 5、 加速度 加速度是矢量,既有大小,又有方向。 加速度方向,和速度的改变Δv 方向一致。 右图,位移(数轴)方向为右向,速度的方向也是右向;上图的汽车加速度为右向,即a >0;下图的汽车加速度为左向,即 a <0。 二、学会看懂图像(匀速、匀变速直线运动) 1、位移时间图像都告诉你什么? ①(横轴)时间: 甲的起始时刻0s ,结束时刻25s ; 乙的起始时刻10s ,结束时刻25s 。
运动学推导公式
学生姓名年级授课时间教师姓名课时 教学目标掌握匀变速运动位移与时间的关系并运用(知道其推导方法);掌握位移与速度的关系并运用。重点难点表达式:x = v0 + at2/2、v2 - v02 = 2ax .运用公式解决具体问题。 自由落体运动 对于自由落体运动,我们有哪些方法来获得(测量到)它的运动信息? 利用打点计时器纸带法。 实验(记录自由落体的运动信息) 分析实验结果: 思考 1、位移与时间的关系? 2、速度如何算?速度与时间的关系? 3、加速度如何算?加速度与时间的关系? 作业 教学效果/ 课后反思 学生自评针对本堂收获和自我表现(对应指数上打√) ①②③④⑤⑥⑦⑧⑨⑩ 签名
2 gt v t = 自由落体运动规律的公式: 221gt s = gs v t 22= g :自由落体的加速度,重力加速度 说明:在同一地点,从同一高度同时自由下落的同物体,下落快慢相同,同时到达地面。 ①定义:在同一地点,做自由落体运动的物体均具有相同的加速度,这个加速度叫 自由落体加速度,也叫重力加速度,通常用g 表示。 ②方向:竖直向下,它的标准值:g=9.8m/s 2 ③经过对不同地区g 值的精确测量,可以发现地球上不同地方g 值不同。 应用: 1、 一个小球在离地面200米处以Vo 的速度向上运动,9秒末的速度大小是2Vo,求几秒后落 地? 2.一条铁链长5米,铁链上端悬挂在某一点,放开后让它自由下落,铁链经过悬点正下方 25米处某一点所用的时间是多少。(取g=10m/s) 3.一物体从某一高度自由下落,经过一高度为2米的窗户用时间0.4秒,g 取10m/s.则物体 开始下落时的位置距窗户上檐的高度是多少米。 4、有两个小球,一个小球从屋顶往下放,另一个小球在距离屋顶b 米处,当屋顶的小球下 落到a 米时,开始放另一个小球,最后两个小球同时落地。求屋的高度 5、一物体自由下落,先后经过A.B.C 三点,经过ab 和bc 相隔时间相等,已知ab=23m,bc=33m, 求物体开始下落点离A 点的高度.
运动学四个基本公式
匀变速直线运动速度与时间关系练习题 1、物体做匀加速直线运动,已知加速度为2m/s2,那么() A.在任意时间内,物体的末速度一定等于初速度的2倍 B.在任意时间内,物体的末速度一定比初速度大2m/s C.在任意一秒内,物体的末速度一定比初速度大2m/s D.第ns的初速度一定比第(n-1)s的末速度大2m/s 2、物体做匀加速直线运动,初速度v0=2m/s,加速度a=0.1m/s2,求(1)第3s末的速度? (2)5s末的速度? 3、质点作匀减速直线运动,加速度大小为3m/s2,若初速度大小为20m/s,求经4s质点的速度? 4、质点从静止开始作匀变速直线运动,若在3s内速度变为9m/s,求物体的加速度大小? 5、飞机以30m/s的速度降落在跑道上,经20s停止下来,若加速度保持不变,则加速度大小是? 6、质点作初速度为零的匀变速直线运动,加速度为3m/s2,则(1)质点第3s的初速度和末速度分别为多少? 7、汽车在平直的公路上以10m/s作匀速直线运动,发现前面有情况而刹车,获得的加速度大小为2m/s2,则: (1)汽车经3s的速度大小是多少? (2)经5s汽车的速度是多少? (3)经10s汽车的速度是多少? 8、质点从静止开始作匀加速直线运动,经5s速度达到10m/s,然后匀速度运动了20s,接着经2s匀减速运动到静止,则质点在加速阶段的加速度大小是多少?在第26s末的速度大小是多少?
9、质点在直线上作匀变速直线运动,若在A点时的速度是5m/s,经3s到达B点速度是14m/s,若再经4s到达C点,则在C点的速度是多少? 10、一物体做直线运动的速度方程为v t=2t+4. (1)说明方程中各字母或数字的物理意义. (2)请画出物体运动的v-t图象. 11、一质点从静止开始以1m/s2的加速度匀加速运动,经5s后作匀速运动,最后2s的时间使质点匀减速到零,则质点匀速运动的速度是多大?减速运动时的加速度是多大?从开始运动到静止的平均速度是多少?
1.运动学测试题
必修一运动学专题训练提升卷 一、单选题 1.下列说法正确的是() A.加速度为零的质点一定处于静止状态 B.质点的加速度不变时,速度也一定不变 C.质点的加速度发生变化时,速度一定变化 D.质点做曲线运动时,它的加速度一定是变化的 2.一个质点做方向不变的直线运动,加速度的方向始终与速度方向相同,但加速度大小逐渐减小直至为零,在此过程中() A.速度逐渐减小,当加速度减小到零时,速度达到最小值 B.速度逐渐增大,当加速度减小到零时,速度达到最大值 C.位移逐渐增大,当加速度减小到零时,位移将不再增大 D.位移逐渐减小,当加速度减小到零时,位移达到最小值 3.a、b、c三个物体在同一条直线上运动,三个物体的x-t图象如图所示,图象c是一条抛物线,坐标原点是抛物线的顶点,下列说法中正确的是() A.a、b两物体都做匀速直线运动,两个物体的速度相同 B.a、b两物体都做匀速直线运动,两个物体的速度大小相等,方向相同 C.在0~5 s内,当t=5 s时,a、b两个物体相距最近 D.物体c一定做变速直线运动 4.一观察者站在第一节车厢前端,当列车从静止开始做匀加速运动时,下列说法正确的是() A.每节车厢末端经过观察者的速度之比是1∶2∶3… B.每节车厢末端经过观察者的时间之比是1∶3∶5… C.在相等时间里经过观察者的车厢数之比是1∶3∶5… D.在相等时间里经过观察者的车厢数之比是1∶2∶3… 5.如图所示是体育摄影中“追拍法”的成功之作,摄影师眼中清晰的运动员是静止的,而模糊的背景是运动的,摄影师用自己的方式表达了运动的美.请问摄影师选择的参考系是() A.大地 B.太阳 C.运动员 D.步行的人
高中物理运动学公式总结
高中物理运动学公式总结 一、质点的运动——直线运动。 1)匀变速直线运动。 1、平均速度; t x V = 定义式平均速率; t s V = 2、有用推理ax Vo Vt 22 2 =- 3、中间时刻速度;2 2V Vt V Vt += =平 4、末速度Vt=V0+at 5、中间位置速度2 2 2 2 Vt V Vx += 6、位移 t 2t 2 a t 0t t 2 V V V s = +==平 7、加速度t V Vt a 0 += (以V0为正方向,a 与V0同向[加速]a ?0,反向则a <0) 8、实验推论; S1-S2=S3-S2=S4-S3= =? x=a t 2 9、初速度为0n 个连续相等的时间内s 的比;s1:s2:s3 :Sn=1:3:5 :(2n-1) 10、初速度为0的n 个连续相等的位移内t 之比; t1:t2:t3 :tn=1:(12-0):(23- ): :( 1-- n n ) 11、a= t n m Sn Sm 2 --(利用上个段位移,减少误差---逐差法) 12、主要物理量及单位:初速度V0=s m ;加速度a=s m 2 ;末速度Vt= s m 1 s m =3.6 h km 注; 1平均速度是矢量, 2物体速度大,加速度不一定加大 2)自由落体运动 1初速度V0=0 2末速度Vt=gt 23下落高度 ) 位置向下计算 从00(2 2 V g h t = 4推论t 2 V =2gh
注; 1自由落体运动是初速度为0的匀加速直线运动,遵循匀变速直线运动规律。 2a=g=9.8s 2 m ≈10s 2 m (重力加速度在赤道附近较小,在高山处比平底小,方向竖直向下) 3)竖直上抛运动 1位移S=V o t- 22 gt 2末速度Vt=V o-gt 3有理推论0 2 2 V Vt -=-2gs 4上升最大高度H m= g Vo 22 (从抛出到落回原位置的时间) 5往返时间g t Vo 2 2= 注; 1全过程处理:是匀减速直线运动,以向上为正方向,加速度取负值。 2分段处理:向上为匀减速直线运动,向下为自由落体运动,具有对称性。 称性上升与下落过程具有对 3:1如在同点,速度等值反向。 2上升过程经过两点所用时间与下落过程经过这两点所 用时间相等。 物理规律汇总 1)相互作用力 1重力 【1】方向竖直向下,但不一定与接触面垂直,不一定指向地心。(除赤道与两级) 【2】重力是由地球的引力而产生,但重力≠引力(除两级) 2弹力 【1】绳子的拉力方向总是沿着绳,且指向绳子收缩的方向。、 【2】同一根绳子上的力相同。 【3】杆的力可以是拉力,也可以是推力。方向可以沿各个方向。 3摩擦力 【1】摩擦力不一定是阻力,也可以使动力。 【2】受滑动摩擦力的物体也可能是静止的。 【3】受静摩擦力的物体也可能是运动的。 2)牛顿运动定律 1力是改变物体运动状态的原因, 2力是产生加速度的原因, 3物体具有加速度,则物体一定具有加速度,物体具有加速度,则一定受力。 4质量是惯性大小的唯一量度, 5物体具有向下的加速度时,物体处于失重状态, 6物体具有向上的加速度时,物体处于超重状态。
基于D-H模型的机器人运动学参数标定方法
基于D-H模型的机器人运动学参数标定方法 摘要:通用机器人视觉检测站中的机器人是整个测量系统中产生误差的最主要环节,而机器人的连杆参数误差又是影响其绝对定位精度的最主要因素。借助高精度且可以实现绝对坐标测量的先进测量设备——激光跟踪仪,及其功能强大的CAM2 Measure 4.0配套软件,并利用串联六自由度机器人运动的约束条件,重新构建起D-H模型坐标系,进而对运动学参数进行修正,获得关节变量与末端法兰盘中心位置在基坐标系下的准确映射关系,以提高机器人的绝对定位精度,最后通过进一步验证,证明取得了较为理想的标定结果。 关键词:视觉检测站;工业机器人;绝对定位精度;激光跟踪仪;D-H模型; Robot kinematic parameters calibration based on D-H model Wang Yi (State key laboratory of precision measuring technology and instruments, Tianjin University, 300072,China) Abstract:Robot for universal robot visual measurement station is the most primary part causing errors in the entire system and link parameter errors of industrial robot have a great influence on accuracy. Employing laser tracker, which can offer highly accurate measurement and implement ADM (absolute distance measurement), as well as relevant software, making use of movement constrain of series-wound six-degree robot, D-H model coordinates were rebuilt. Accordingly, kinematic parameters were modified, and precise mapping from joint variables to the center of the end-effector in base coordinate was obtained and accuracy got improved. At last, result is proved acceptable by validation. Keywords: visual measurement station; industrial robot; accuracy; laser tracker; D-H model; 引言:随着立体视觉技术的不断完善与发展,利用机器人的柔性特点,发展基于立体视觉的通用测量机器人三维测试技术逐渐成为各大机器人生产厂家非常重视的市场领域。机器人的运动精度对于工业机器人在生产中的应用可靠性起着至关重要的作用。机器人各连杆的几何参数误差是造成机器人系统误差的主要环节,它主要是由于制造和安装过程中产生的连杆实际几何参数与理论参数值之间的偏差造成的。通常,机器人以示教再现的方式工作,轨迹设定好之后,只在某些固定点之间运动,这种需求使得机器人的重复性精度被设计得很高,可以达到0.1毫米以下,但是绝对定位精度很差,可以到2、3毫米,甚至更大[1]。常见的标定方法可分为三类:一、建立微分运动学模型,然后借助标定工具测量一定数目的机器人姿态,最后用反向求解的方法得到真实值与名义值之间的偏差[2]。二、使用标定工具获得一系列姿态的数据,然后对数据用线性或非线性迭代求解的方法得到机器人几何参数的修正值[3],[4]。 三、建立机器人运动学模型,用直接测量的方法修正模型参数[5],[6],[7],[8]。最近,世界著名工业机器人生厂商ABB公司运用了莱卡激光跟踪仪以保证其产品的精度。使用激光跟踪仪标定机器人不再需要其它的测量工具,从而也就省去了标定测量工具的繁琐工作;同时,这一方法是对机器人的各个运动学几何参数进行修正,结果会使机器人在整个工作空间内的位姿得到校准,而不会像用迭代求解的方法那样,只是对某些测量姿态进行优化拟合,可能会造成在非测量点处残留比较大的误差;再者,随着机器人的机械磨损,机器人的运动学参数需要重新标定,而激光跟踪仪测量系统配置起来简单,特别适合于工业现场标定。正是鉴于以
高一物理运动学公式整理(打印部分)
第一章 1、平均速度定义式:t x ??=/υ ① 当式中t ?取无限小时,υ就相当于瞬时速度。 ② 如果是求平均速率,应该是路程除以时间。请注意平均速率与平均速度在大小上面的区别。 2、两种平均速率表达式(以下两个表达式在计算题中不可直接应用) ③ 如果物体在前一半时间内的平均速率为1υ,后一半时间内的平均速率为2υ,则整个过程中的 平均速率为2 2 1υυυ+= ④ 如果物体在前一半路程内的平均速率为1υ,后一半路程内的平均速率为2υ,则整个过程中的 平均速率为2 12 12υυυυυ+= ⑤ ??? ????====t x t x 路位时间路程平均速率时间位移大小平均速度大小 3、加速度的定义式:t a ??=/υ ⑥ 在物理学中,变化量一般是用变化后的物理量减去变化前的物理量。 ⑦ 应用该式时尤其要注意初速度与末速度方向的关系。 ⑧ a 与υ同向,表明物体做加速运动;a 与υ反向,表明物体做减速运动。 ⑨ a 与υ没有必然的大小关系。 第二章 1、匀变速直线运动的三个基本关系式 ⑩ 速度与时间的关系at +=0υυ ? 位移与时间的关系2 02 1at t x + =υ (涉及时间优先选择,必须注意对于匀减速问题中给出的时间不一定就是公式中的时间,首先运用at +=0υυ,判断出物体真正的运动时间) 一般规定0v 为正,a 与v 0同向,a >0(取正);a 与v 0反向,a <0(取负) 同时注意位移的矢量性,抓住初、末位置,由初指向末,涉及到x 的正负问题。 注意运用逆向思维: 当物体做匀减速直线运动至停止,可等效认为反方向初速为零的匀加速直线运动。 (1)深刻理解: ? ??要是直线均可。运动还是往返运动,只轨迹为直线,无论单向指大小方向都不变 加速度是矢量,不变是加速度不变的直线运动 (2)公式 (会“串”起来)
FMS功能性运动测试评价方法(具体)
FMS功能性运动测试评价方法 功能性动作模式筛查(Functional Movement Screen,FMS)是由美国着名理疗专家和训练学专家Gray Cook和Lee Burton等人研究创新,广泛应用于美国职业运动员运动能力评估中,旨在发现人体基本动作模式障碍或缺陷的一种测试方法。 FMS在国外职业竞技体育中被广泛应用于理疗康复和体能训练领域,在欧洲以各足球队为主,在美国四大联盟(NBA、NHL、NFL 和MLB)的球队几乎都在应用FMS的测试和训练。作为对传统测试训练方法的一个有益补充,以此作为检测运动员潜在伤病并进行伤病预防训练的依据,并通过训练提高运动员的竞技能力,延长运动员的运动寿命。 FMS测试通过7个基本动作检测人体运动的对称性、弱链以及局限性,对运动代偿进行跟踪测试,并通过相应的动作训练来解决身体的弱链和局限性,以减少运动员的运动损伤,提高运动员的竞技能力。FMS测试在运动医学和体能训练之间架起了一座桥梁,使教练员在身体训练中更为自觉地使用康复知识为运动员健康服务。 FMS测试方法 1、过顶深蹲动作模式
测试目的:评价肩、胸椎、髋、膝和踝关节双侧对称性、灵活性和躯干稳定性。 测试方法: (1)运动员两脚分开与肩同宽,双手以相同间距握测试杆(测试杆与地面平行) (2)双臂伸直举杆过顶,慢慢下蹲,尽力保持脚后跟着地。 (3)测试允许试三次,如果还是不能完成这个动作,将测试板垫在运动员的脚跟下再进行以上动作测试。 评分标准: 3分:测试杆在头的正上方;躯干与小腿平行或与地面垂直;下蹲时大腿低于水平线;保持双膝与双脚方向一致。 2分:脚跟下垫上木板之后按照以上要求完成动作。 1分:脚跟下垫上木板之后还不能按要求完成动作。 0分:测试过程中任何时候,运动员感觉身体某部位出现疼痛。2、跨栏上步动作模式 测试目的:评价髋、膝、踝关节的灵活性和稳定性、身体核心部位的控制能力以及身体两侧在运动中的对称性。
运动学综合测试题
运动学综合测试题 本卷分第Ⅰ卷(选择题)和第Ⅱ卷(非选择题)两部分.满分100分,时间90分钟. 说明:所有答案均填写在答题纸上,否则不得分。 第Ⅰ卷(选择题共56分) 一、选择题(共14小题,每小题4分,共56分,在每小题给出的四个选项中,有的小题只有一个选项符合题目要求,有些小题有多个选项符合题目要求,全部选对的得4分,选不全的得2分,有选错或不答的得0分) 1.关于参考系的选择,下列说法正确的是() A.在空中运动的物体不能作为参考系 B.参考系必须选取与地面连在一起的物体 C.参考系的选择应该以能准确而方便地描述物体的运动为原则 D.对于同一个运动,选择的参考系不同,观察和描述的结果仍然相同 2.关于质点,下列说法正确的是() A.任何静止的物体都可以视为质点 B.研究电子自旋时,电子可以视为质点 C.在平直的高速公路上行驶的小汽车,可视为质点 D.质点是一个无大小形状的理想化模型 3.以下的计时数据指的是时间的是() A.列车在9时45分到达途中的南京站 B.在某场足球赛中,甲队于开赛10min后攻入1球 C.中央电视台的新闻联播节目于19时开播 D.某短跑运动员用11.5秒跑完了100m 4.一辆汽车从甲地驶向乙地以速度V行驶了2/3的路程,接着以20km/h的速度行驶到达乙 地,后以36km/h的速度返回甲地,则全程中的平均速度 v为() A.0 B.48km/h C.24km/h D.36km/h 5.关于位移和路程,下列说法错误 ..的是() A.位移与运动路径无关,仅由初末位置决定 B.位移的大小等于路程 C.路程是标量,位移是矢量,位移的运算遵循平行四边行定则 D.位移是由初位置指向末位置的有向线段,路程是物体运动轨迹的长度 6.以下对于加速度和速度的认识中,错误 ..的有() A.物体加速度的方向,就是物体速度方向 B.物体的速度为零,加速度可以不为零C.物体的速度很大,加速度可以为零 D.物体的速度变化越大,则加速度越大7.下图表示A、B两运动物体相对于同一参考系的的s-t图象,下列说法正确的是()
机器人逆运动学求解的可视化算法
2006年7月 July 2006 计 算 机 工 程 Computer Engineering 第 第14期Vol 32卷 .32 № 14 ·多媒体技术及应用· 文章编号:1000—3428(2006)14—0193—03 文献标识码:A 中图分类号:TP249 机器人逆运动学求解的可视化算法 周芳芳,樊晓平,赵 颖 (中南大学信息科学与工程学院自动化工程研究中心,长沙 410075) 摘 要:机器人逆运动学求解的可视化算法包含两部分,数值求解两个(或一个)非线性方程和4(或5)自由度机器人封闭解,实现了任意结构的6自由度机器人的逆运动学方程的求解,根据D-H 参数表生成机器人三维模型实现机器人结构的可视化,有效地判断逆解的合理性,并为机器人学习提供了辅助工具。 关键词:机器人;逆运动学;可视化;数值计算 Visual Algorithm of Robot Inverse Kinematics ZHOU Fangfang, FAN Xiaoping, ZHAO Ying (Research Center for Automation Engineering, College of Information Science and Engineering, Central South University, Changsha 410075) 【Abstract 】This paper introduces the robotic inverse kinematics visual algorithm which includes two parts. Firstly two (or one) non-linear equations are numerically computed, and then the remaining four (or five) joint values are determined in closed form once two (or one) joint values are known. And the visualization of the robot models produced by D-H parameters is used to determine the solutions effectively. 【Key words 】Robot manipulator; Inverse kinematics; Visualization; Numerical computer 机器人的可视化技术的研究可以帮助学习和研究机器人,减少分析和学习的时间,深入理解机器人的基本概念和研究的难点。机器人逆运动学求解的可视化算法通过数值计算快速求解任意结构的6自由度机器人的逆解,并将求解的结果可视化,有效地判断逆解的合理性,同时为机器人运动学的学习提供了辅助工具。 Pieper 最早提出含有3个相邻关节轴互相垂直(或平行)的6自由度机器人可以求逆运动学封闭解[1],求解的过程被简化为计算四元多项式方程。为了机器人的学习和研究需要求解一般结构的6自由度机器人的逆运动学方程,目前多采用数值计算的方法通过计算逆Jacobin 矩阵求解任意结构的6自由度机器人的运动学方程[3,4]。但该方法需要数值求解6个非线性方程,不仅计算量大,而且会产生不符合实际物理约束的多余解。 本论文介绍的求解方法建立在4、5自由度机器人的运动学求解的基础之上[5],将6自由度机器人逆运动学方程求解的过程简化为计算两个非线性方程。并且利用D-H 参数表产生机器人模型,利用解的可视化来判断解的有效性,排除不合理的逆解。 1运动学的定义 机器人运动学方程定义为 123456A A A A A A P = (1) 矩阵A i 定义为 00 1i i i i i i i i i i i i i i i i i i C S C a S S C S a C A d γσσγσγ????????=?????? 其中C i =cos θi ,S i =sin θi ,σi =sin αi ,γi =cos αi 。已知方程(1)中的角度θ,求解目标点的位姿P 为正运动学求解。 末端执行器的位姿矩阵可表示为 00010 1x x x x y y y y z z z z n b t p n b t p n b t p P n b t p ????????== ?????? ???? 其中n ,b ,t ,p 是3×1向量。已知末端执行器的位姿P 求解关节变量角θ为逆运动学求解。 2 机器人逆运动学求解 本文求解的是任意结构的6自由度机器人的逆运动学方程。求解的方法有以下3个特点: (1)该方法建立在4、5自由度机器人的运动学求解的基础之上[5],可以更好地理解6自由度机器人的结构和计算; (2)把6自由度机器人逆运动学方程求解的过程简化为数值计算两个非线性方程; (3)利用末端执行器的非完整性约束可进一步简化求解过程。 求解思路:考虑6自由度机器人杆件结构,对不同的结构采用不同的求解方法。通过分析主要有3种情况,如图1。 (1)对无垂直或无平行关节轴的6自由度机器人,首先化简为4自由度机器人,然后二维迭代求解2个关节变量,最后封闭求解其余4个变量; (2)对包含一对垂直或平行的关节轴的机器人,则化简为5自由度机器人,一维迭代求解1个关节变量,封闭求解另外5个变量; (3)对于包含3个相邻或3个以上的垂直或平行的关节轴机器人,可以直接求解6个关节变量。 基金项目:国家自然科学基金资助项目(69975003) 作者简介:周芳芳(1980—),女,博士,主研方向:虚拟现实技术,计算机网络,机器人仿真;樊晓平,博士、教授、博导;赵 颖,硕士 收稿日期:2005-07-27 E-mail :zff@https://www.360docs.net/doc/ea7945771.html, —193—
运动学推导公式
分析实验结果: 思考 1、位移与时间的关系? 2、速度如何算?速度与时间的关系? 3、加速度如何算?加速度与时间的关系?
2 gt v t = 自由落体运动规律的公式: 22 1gt s = gs v t 22 = g :自由落体的加速度,重力加速度 说明:在同一地点,从同一高度同时自由下落的同物体,下落快慢相同,同时到达地面。 ①定义:在同一地点,做自由落体运动的物体均具有相同的加速度,这个加速度叫自由落体加速度,也叫重力加速度,通常用g 表示。 ②方向:竖直向下,它的标准值:g=9.8m/s 2 ③经过对不同地区g 值的精确测量,可以发现地球上不同地方g 值不同。 应用: 1、 一个小球在离地面200米处以Vo 的速度向上运动,9秒末的速度大小是2Vo,求几秒后落 地? 2.一条铁链长5米,铁链上端悬挂在某一点,放开后让它自由下落,铁链经过悬点正下方25米处某一点所用的时间是多少。(取g=10m/s) 3.一物体从某一高度自由下落,经过一高度为2米的窗户用时间0.4秒,g 取10m/s.则物体开始下落时的位置距窗户上檐的高度是多少米。 4、有两个小球,一个小球从屋顶往下放,另一个小球在距离屋顶b 米处,当屋顶的小球下落到a 米时,开始放另一个小球,最后两个小球同时落地。求屋的高度 5、一物体自由下落,先后经过A.B.C 三点,经过ab 和bc 相隔时间相等,已知ab=23m,bc=33m,求物体开始下落点离A 点的高度.
一.匀变速直线运动规律的推导: 自由落体运动是一种特殊的匀变速直线运动。代数法 几何法Array 二.匀变速直线运动规律小结: 3
运动学公式计算
基础概念的判断 1 做下列运动的物体,能当做质点处理的是( C ) A 自转中的地球 B 自转中的风力发电机叶片 C 匀速直线运动的火车 D 在冰面上旋转的花样滑冰运动员 三个基本公式的应用 1 质点做直线运动的位移x与时间t的关系为x=5t+t2(各物理量均采用国际制单位),则该质点( D ) A 第1s内的位移是5m B 前2s的平均速度是6m/s C任意相邻的1s内位移差都是1m D 任意1s内的速度增量都是2m/s 2一物体作匀加速直线运动,通过一段位移Δx所用的时间为t1,紧接着通过下一段位移Δx 所用时间为t2,则物体运动的加速度为( C ) A.B.C.D. 3 某人估测一竖直枯井深度,从井口静止释放一石头并开始计时,经2s听到石头落底声。由此可知井深约为(不计声音传播时间,重力加速度为g去10m/s2)( B ) A 10m B 20m C 30m D 40m 4 四个小球在离地面不同高度处同时从静止释放,不计空气阻力,从开始运动时刻起每个相等的时间间隔小球一次碰到地面,图中能反映出刚开始运动时各小球相对地面的位置的是( C ) 5在一次交通事故中,交通警察测量出肇事车辆的刹车痕迹是30 m,该车辆最大刹车加速度是15 m/s2,该路段的限速为60 km/h.则该车(A) A.超速B.不超速C.无法判断D.速度刚好是60 km/h
B 6 物体静止在光滑水平面上,先对物体施一水平向右的恒力F 1,经t 秒后物体的速率为v 1时撤去F 1,立即再对它施一水平向左的水平恒力F 2,又经2 t 秒后物体回到出发点,此时速率为v 2,则v 1、v 2间的关系是 ( C ) A .21v v = B .221v v = C .3212v v = D .5213v v = 7 做初速度不为零的匀加速直线运动的物体,在时间T 内通过位移s 1到达A 点,接着在时间T 内又通过位移s 2到达B 点,则以下判断正确的是 ( AC ) A .物体在A 点的速度大小为 122s s T + B .物体运动的加速度为122s T C .物体运动的加速度为212s s T - D .物体在B 点的速度大小为212s s T - 8 如图所示,A 、B 两物体相距s =7m ,物体A 以v A =4m/s 的速度向右匀速运动。而物体B 此时的速度v B =10m/s ,向右做匀减速运动,加速度a =-2m/s 2。那么物体A 追上物体B 所用的时间为( A ) A .7s B .8s C .9s D 10s 9 物体以速度v 匀速通过直线上的A 、B 两点,所用时间为t ;现在物体从A 点由静止出发,先匀加速直线运动(加速度为a 1 )到某一最大速度v m 后立即做匀减速直线运动(加速度大小为a 2)至B 点速度恰好减为0,所用时间仍为t 。则物体的 ( AD ) A .v m 只能为2v ,与a 1、a 2的大小无关 B .v m 可为许多值,与a 1 、a 2的大小有关 C .a 1、a 2须是一定的 D .a 1、a 2必须满足 t v a a a a 22121= +? 10 物体由静止开始做加速度大小为a 1的匀加速直线运动,当速度达到v 时,改为加速度大 小为a 2的匀减速直线运动,直至速度为零。在匀加速和匀减速运动过程中物体的位移大小和所用时间分别为x 1、x 2和t 1、t 2,下列各式成立的是( ACD ) A . 1122x t x t = B . 1122a t a t = C . 12121212x x x x t t t t +==+ D .1212 2()x x v t t +=+ 11一个物体从某一高度做自由落体运动, 已知它第一秒内的位移恰为它最后一秒内位移的 一半, g 取10m/s 2 , 则它开始下落时距地面的高度为: ( B ) A .5m B .11.25m C .20m D .31.25m 12 打开水龙头,水顺流而下,仔细观察将会发现连续的水流柱的直径在流下的过程中,是逐渐减小的(即上粗下细),设水龙头出口处半径为1cm ,安装在离接水盆75cm 高处,如果 测得水在出口处的速度大小为1m/s ,g=10m/s 2 ,则水流柱落到盆中的直径( A ) A .1cm B .0.75cm C .0.5cm D .0.25cm