在 MATLAB 2012a 上配置 MATLAB Distributed
在MATLAB 2012a 上配置MATLAB Distributed Computing Server过程详解
最近在做一个关于分布式人脸识别的研究,利用MATLAB自带工具箱(distcomp)实现分布式计算从而达到提高人脸识别速度的效果。今天下午对采用分布式架构和不采用分布式架构的两种表情识别算法进行了测试。在只创建4个分布式任务的情况下,时间有很明显的提高,而且对算法的识别率没有任何影响。
利用MATLAB实现分布式计算的前提是配置好 MATLAB Distributed Computing Server 的环境。配置的方法有两种:基于可视化界面的配置和基于控制台命令行的配置。前几天mathwork公司发布的 MATLAB 2012a在多个方面都了升级和优化其中MATLAB Distributed Computing Server的版本现在已经升级为6.0了。下面就分享一下基于可视化界面(主要)和控制台命令行相结合方式的MATLAB 2012a中MATLAB Distributed Computing Server 6.0的详细配置过程。
一、安装MATLAB 2012a,详细步骤这里就不说了,相信看这篇文章的博友都会的。
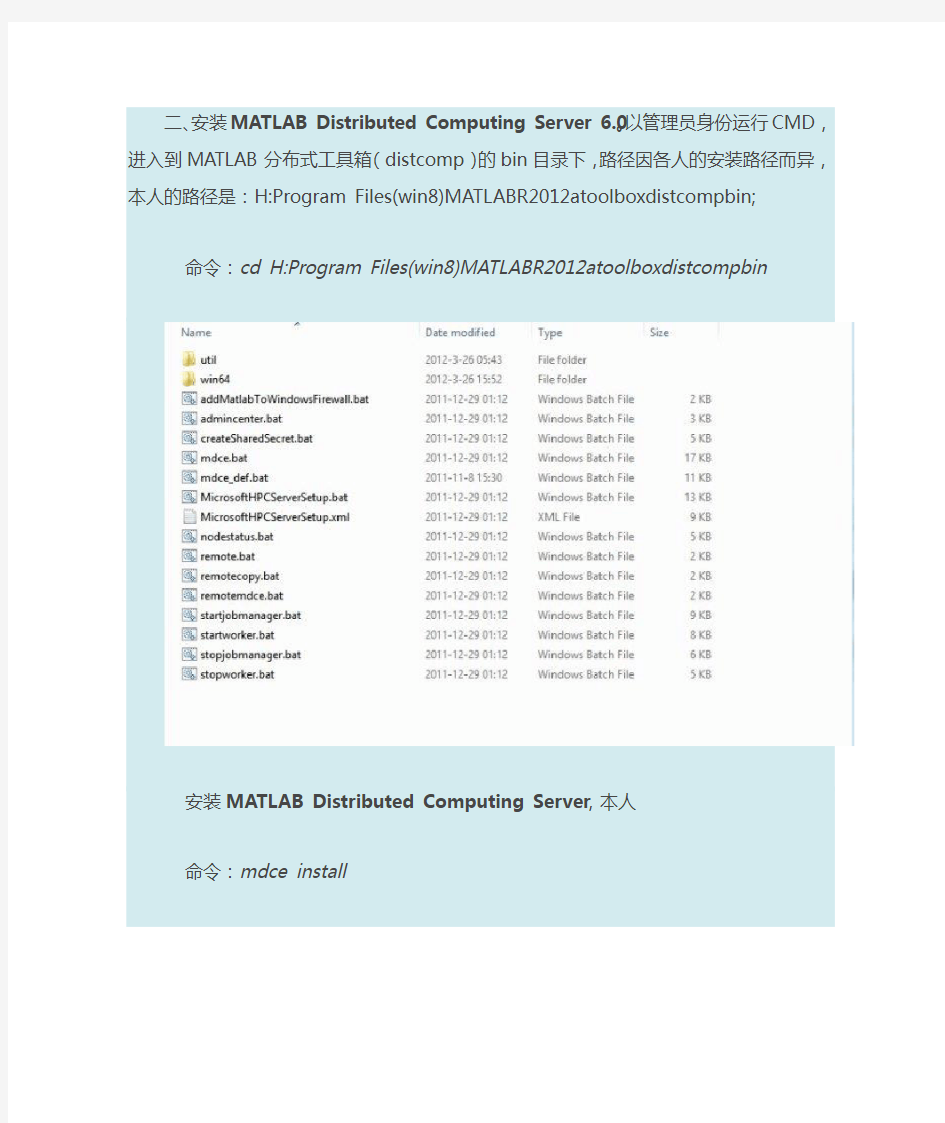
二、安装MATLAB Distributed Computing Server 6.0。以管理员身份运行CMD,进入到MATLAB分布式工具箱(distcomp)的bin目录下,路径因各人的安装路径而异,本人的路径是:H:Program Files(win8)MATLABR2012atoolboxdistcompbin;
命令:cd H:Program Files(win8)MATLABR2012atoolboxdistcompbin
安装MATLAB Distributed Computing Server,本人
命令:mdce install
此时可以打开Windows 服务管理器,查看MATLAB Distributed Computing Server服务是否已经开启,若未开启可在cmd中输入:mdce start开启服务
三、创建和配置分布式任务管理。先准备几台将用来做分布式计算的计算机构建一个成局域网。打开Admin Center可视化界面进行配置。可以直接双击分布式工具箱(distcomp)的bin目录下的admincenter.bat文件也可以输入以下命令行
命令:admincenter.bat
弹出界面,配置主机:
点击Add or Find按钮,再出来的界面中输入你将用来做分布式计算的计算机的IP地址,这里我只配了两台,IP地址分别为192.168.0.104,192.168.0.105。输完所有的IP地址后,点击Ok。
接下来一直下一步(Next),最后Start。
配置完主机后,开始创建任务管理。在MATLAB Job Scheduler(MJS)中,点击Start,为MJS输入一个名称:例如myjob。
创建worker,selectAll,为每台主机创建2个workers,总共6个workers,ok!
至此MATLAB Distributed Computing Server的环境已经搭建完好,写好的分布式程序就可以开始工作啦!
10.0.0.222 Nova-PC
10.0.0.223 WIN-FJGAP7HGSTV
控制器极点配置方法
控制器极点配置方法 如果已知系统的模型或传递函数,通过引入某种控制器,使得闭环系统的极点可以移动到指定的位置,从而使系统的动态性能得到改善。这种方法称为极点配置法。 例6-12 有一控制系统如图6-38,其中,要求设计一个控制器,使系统稳定。 图6-38 解:(1)校正前,闭环系统的极点: > 0 因而控制系统不稳定。 (2)在控制对象前串联一个一阶惯性环节,c>0,则闭环系统极点: 显然,当,时,系统可以稳定。但此对参数c 的选择依赖于 a 、b 。因而,可 选择控制器,c 、d ,则有特征方程: 当,时,系统稳定。 本例由于原开环系统不稳定,因而不能通过简单的零极点相消方式进行控制器的设计,其原因在于控制器的参数在具体实现中无法那么准确,从而可能导致校正后的系统仍不稳定。 例6-13 已知一单位反馈控制系统的开环传递函数:
要求设计一串联校正装置Gc(s) ,使校正后系统的静态速度误差系统,闭环主导极点在 处。 解:首先,通过校正前系统的根轨迹可以发现,如图6-39所示,其主导极点为: 。 图6-39 为使主导极点向左偏移,宜采用超前校正装置。 (2)令超前校正装置,可采用待定系数法确定相关参数: 又
其中、、、为待定系数。 进一步可得: 即 将代入式子可以得到:,,,。进一步可得超前校正装置的传递函数: 校正后系统的根轨迹如图6-39所示。 该校正装置与例6-7中由超前装置获取的校正装置结果基本相同,说明结果是正确的。 在matlab中,亦有相应的命令可进行极点配置,主要有三个算法可实现极点配置算法:Bass-Gura算法、Ackermann 算法和鲁棒极点配置算法。这些算法均以状态空间进行表征,通过设定期望极点位置,获取状态反馈矩阵K。下面通过示例介绍其中的一种算法。 例6-14 考虑给定的系统,其状态方程模型如下:
CADWORX安装及汉化说明
安装 选择CADWORX安装盘上的安装文件setup.exe可将CAWORX软件安装到硬盘上,安装过程比较简单。根据软件提示完成整个安装过程。 注意:当你把安装盘放入光驱,软件会自动运行安装文件,如果没有自动运行,则双击setup.exe文件。 Plant_PID文件夹下的setup.exe文件包含CADWorx Plant Professional 2013、CADWorx P&ID Professional 2013、CADWorx P&ID 2013三个文件的安 装 Steel文件夹下的setup.exe文件包含CADWorx Steel Professional Plus 2013的安装 CDR文件夹下的setup.exe文件包含CADWorx Design Review 2013和CADWorx Design Create 2013的安装 快速启动: 1.运行setup.exe文件 2.点击安装过程创建的图标,启动CADWORX 3.按照对话框的提示,完成剩下部分的安装 4.第一次运行需要设置一些参数,一般选择默认值就好 CADWORX安装 安装类似于大部分软件的安装,以下是安装要求 安装驱动器是什么? CADWorx使用哪个版本的AutoCAD? CADWorx安装在什么位置 安装CADWorx: 1.把光盘放入光驱 2.点击开始 3.选择运行,或在搜索程序和文件“框中键入以下信息。 4.在
采购设备的技术参数及标准配置要求
技术参数要求 一、平板电脑 1、操作系统:Android 5.1 2、★处理器型号:海思麒麟930 3、★内存容量:3GB 4、★存储容量:64GB 5、GPU型号:Mali-T628 6、显示屏:电容式触摸屏,多点式触摸屏 7、屏幕类型:十点式触摸屏,IPS屏幕 8、★屏幕尺寸:10.1英寸 9、★屏幕分辨率:1920×1200 10、★屏幕像素密度:224PPI 11、★指取设备:触摸屏,主动笔 12、★WiFi功能:WIFI无线上网 13、★网络模式:移动4G(TD-LTE),联通4G(TD-LTE/FDD-LTE),移动3G (TD-SCDMA),联通3G(WCDMA),联通2G/移动2G(GSM) 14、麦克风:内置麦克风 15、扬声器:内置4颗高功率喇叭,SWS2.0和Harman Kardon音效技术 16、数据接口:1×Micro-USB2.0 17、音频接口:3.5mm耳机接口 18、★摄像头:双摄像头(前置500W,后置1300W),LED辅助灯,自动对焦,F2.4光圈,F2.0光圈,蓝玻璃滤光 19、蓝牙:支持,蓝牙4.0模块 20、★GPS:内置GPS导航 21、★内置感应:智能重力感应,三轴陀螺仪,指南针 22、★通讯功能:支持通话功能 23、指纹识别功能 24、★电池类型:锂电池,6660毫安 25、续航时间:525小时左右
二、打印机 1、分辨率要求 黑白:不低于1,200 x 1,200 dpi,彩色不低于4,800 x 1,200 dpi 2、打印速度要求 黑白:草稿模式下使用AC电源不低于20页/分钟,使用电池不低于18页/分钟;标准模式下使用AC 电源不低于10页/分钟,使用电池不低于9页/分钟。彩色:草稿模式使用AC电源不低于19页/分钟,使用电池时不低于17页/分钟;标准模式下使用AC 电源不低于7页/ 分钟,使用电池不低于6页/分钟。 3、支持纸张尺寸要求 适用A4;A5;A6;B5 (ISO);B5 (JIS);信封(A2;C5;C6;DL);相纸(10 x 15厘米。 4、要求内置电池,尺寸接近于(长x 宽x 高) 364 x 186 x 69毫米,重量不大于2.3千克(含电池)。要求标配无线功能,支持云打印,支持移动打印,支持自动无线连接功能。要求标配一个USB接口,支持现在办公系统及软件。 三、测距仪 参数要求:测量范围0.05m-100m,精度不低于+-1.5mm,测量速度6-10/秒 四、高拍仪 1、对焦模式:定焦 2、操作方式:直立式、90度角折叠 3、高度:480mm 4、主感应器解析度:不低于2594x1944 (5 million pixels)可辨识小五号字体 5、辅感应器解析度:不低于1600X1200 (2 million pixels)拍摄人脸功能 6、最大拍摄尺寸:不低于A4幅面 7、拍摄速度:不大于1秒/张 8、图像色彩要求:RGB24,一千六百万色全彩模式 9、★水平方向270°旋转无死角拍摄,垂直方向≧45°向下倾斜并可以旋转,方便采集人像。 10、二次开发WDM Driver / VFW Driver / 标准TWAIN 接口 SDK支持B/S和C/S软件系统的无逢集成,并提供B/S和C/S软件系统的内置拍照
实验二 状态反馈与极点配置
实验二 状态反馈与极点配置 一、实验目的 a) 掌握状态反馈极点配置的设计方法。 b) 掌握运用模拟运算放大电路实现状态反馈。 c) 验证极点配置理论。 二、实验仪器 a) TDN —AC/ACS 型自动控制系统实验箱一台 b) 示波器 c) 万用表 三、实验原理和电路 为了更好地达到系统所要求的各种性能指针,需要通过设计系统控制器,改善原有系统的性能。由于系统的性能与其极点分布位置有密切关系,因而极点配置是系统设计的关键。极点配置就是利用状态反馈或输出反馈使闭环系统的极点位于所希望的极点位置。在系统综合设计中,状态反馈和输出反馈是两种常用的反馈形式,而在现代控制理论中系统的物理特性是采用系统内部状态变量来描述的,利用内部状态变量乘以系数(向量)与系统参考输入综合构成的反馈系统,具有更优的控制效果。 1、单输入单输出状态反馈的极点配置 受控系统如图2-1, 图2-1受控系统 其中状态变量1()1/G S S =,2()1/(0.051)G S S =+,状态变量1x 、2x ,对系统进行极点配置,达到系统期望的性能指针:输出超调量5%P M ≤;峰值时间 0.5p t s ≤;系统频宽10b ω≤;跟踪误差0p e =(对于阶跃输入)。 i. 确定受控系统的状态空间模型 211()()x u x G S =-,122()x x G S =,1y x =,系统的状态方程为: .11.2220200101x x u x x ??-?????? ??=+????????-????????? ?;[]1210x y x ??=???? ii. 确定期望的极点 P M = p t = ;b n ωω=可解得0.707ζ≥,选0.707ζ=;9n ω≥由10b ω≤选10n ω=。 这样期望极点为:* 17.077.07j λ=-+
设备主要技术规格及配置要求
附件:设备主要技术规格及配置要求包件一:低频电子脉冲治疗仪
包件二:生物刺激反馈治疗仪 1.生物刺激反馈仪 1.1 反馈模式:肌电触发电刺激模式 1.2 通道数:2 2.神经肌肉电刺激 2.1 刺激频率:2—100 HZ 2.2 脉冲宽度:50—400 US *2.3 输出电流:0—100 MA (1KΩ负载) 2.4 刺激持续时间:1—80 S 2.5 刺激间隙时间:1—80 S 2.6 上升和下降时间可调:0—10 S 3.表面肌电数据采集 3.1 EMG灵敏度:0.1 UV 3.2 EMG 量程:0—2000 UV 4.整机功能 *4.1 触摸控制屏 4.2 声音反馈功能 4.3 三种存贮方式:存贮器、CF卡、USB卡 4.4 工作软件:包括open session和script session工作模式4.5 嵌入式软件包括治疗尿失禁和便秘。
包件三:12导联手持心电分析系统 *1 采样频率:每通道≥1000Hz; 2 导联:12导心电图导联; 3 标准灵敏度:10mm/mV,误差不大于±5%; 4 输入回路电流:各输入回路电流不大于0.1μA; 5 输入阻抗:输入阻抗不小于5MΩ; 6 噪音电平:折合到输入端的噪声电压不大于15μV ; p-p 7 共模抑制比:不小于 80dB; 8 50HZ干扰抑制滤波器:≥20dB; 9 低频特性:时间常数不小于3.2s; 10 记录速度:有12.5mm/s、25mm/s、50mm/s、100mm/s四档选择,误差不大于±5%; 11 最小检测信号:对10HZ,20μV峰峰值的正弦信号能检测; 12 道间干扰:由于道间影响而产生的描迹偏转必须不大于0.5mm; 13十二导同步采集 *14 自定义12导联心电图(可延展十八导联心电图) 15 各导联心电波形的P波、QRS波和T波的起点和终点由分析程序自动定位 *16 蓝牙PDA手持心电采集系统。 *17 医院信息化同步功能:可升级为心电信息整体网络化解决方案中的设备终端; 18 具有3C强制认证 19 配记录盒4只,四付导联线。
全状态反馈系统极点配置的数字仿真(终)
实验一 全状态反馈系统极点配置的数字仿真 一、实验目的 1掌握全状态反馈系统的极点配置方法; 2研究不同极点配置对系统特性的影响。 二、实验原理 闭环系统性能与闭环极点(特征值)密切相关,在状态空间的分析和综合中,除了利用输出反馈以外,主要利用状态反馈来配置极点,它能提供更多的校正信息。 利用状态反馈任意配置闭环极点的充要条件是:受控系统可控。 设SIMO (Single Input-Multi Output )受控系统的动态方程为 u A b x x += ,x y C = 状态向量x 通过状态反馈矩阵k ,负反馈至系统参考输入v ,于是有 u v kx =+ 这样便构成了状态反馈系统,其结构图如图1-1所示 图1-1 SIMO 状态反馈系统结构图 状态反馈系统动态方程为 x ()A bk x bv =++,x y C = (1-1) 闭环系统特征多项式为 ()()f I A bk λλ=-+ (1-2) 设闭环系统的期望极点为1λ,2λ,…,n λ,则系统的期望特征多项式为 )())(()(21*n f λλλλλλλ---= (1-3) 欲使闭环系统的极点取期望值,只需令式(1-2)和式(1-3)相等,即 )()(*λλf f = (1-4) 利用式(1-4)左右两边对应λ的同次项系数相等,可以求出状态反馈矩阵 []n k k k 21=k 例如SISO (Single Input-Single Output )受控系统的开环传递函数为 3 1)(s s G = 若采用输出单位反馈构成闭环系统,则该系统显然是不稳定的,若按指定的极点配置,采用
全状态反馈构成闭环系统,则可以满足给定的性能要求。 原系统可控标准形形式的状态方程和输出方程为 u x x x u A ???? ? ?????+????????????????????=+=100000100010321b x x []???? ??????==321001x x x C y x 由于本系统是完全可控的,能够通过反馈向量k 的选择,使闭环系统的极点置于所希望的位置上,以满足系统的性能指标要求。 若根据系统的性能指标,希望配置的极点为31-=p ,2j 23,2±-=p ,则采用状态反馈后系统的特征多项式为 32321()det[I ()]f A bk k k k λλλλλ=-+=--- 希望的系统特征多项式为 *32()(3)(2j2)(2j2)72024f λλλλλλλ=++-++=+++ 比较上述两个多项式得系统状态反馈向量为 [][]123k 24207k k k ==--- 因此,加入状态反馈后,闭环系统的状态方程为 u x x x u A ???? ??????+????????????????????---=+=10072024100010321b x x 其结构图如图1-2所示 图1-2 状态反馈系统结构图 三、实验内容及步骤 实验通过MATLAB 软件实现。 1. 双击MATLAB 图标或单击开始菜单,依次指向“程序”、“MATLAB ”,单击MATLAB ,进入MATLAB 命令窗口。单击MATLAB 工具条上的Simulink 图标 ,运行后出现Simulink 模块库浏览器,并单击其工具条左边的图标,弹出新建模型窗口。
关于CADWorx等级库的制作流程
关于CADWorx等级库的制作流程 各位有什么问题的话可以直接回复讨论。有些地方我写得还不是很准确,大家可以将疑惑的地方指出来。 2013年5月18日更新 以下文章中出现的目录均为CADWorx安装在默认路径即C盘根目录的情况。请根据自己软件的安装位置对号入座。 CADWorx的元件库(Catalog)包含了所有的尺寸、材料、壁厚等级、壁厚、端点类型、元件类别等数据,分为Global、Industry和Company三个层次,分别使用.cat、.ids和.cmp 作为后缀名,等级库存放在等级库项目中,后缀名.prj,在之前的版本中,没有这么分,后缀名全部为.gbb,跟PDS的PCD文件有点类似。这些文件都可以直接用记事本或者notepad 等工具打开进行编辑,如果你后面对它们的学习深入以后,其实通过编辑这些文本都可以实现制作元件和等级。而我们一般情况下都会选择使用软件的SpecEditor工具来进行元件库与等级库的制作。如下图,软件安装好以后,默认自带的管道数据库以及SpecEditor启动程序存放在 C:\CADWorx 2013\Plant\Spec下面。这个目录下面还存放着一些自定义元件的图形文件和一些配置和预设数据的XML文件。有意思的事情是,其实安装好以后SpecEditor工具的使用是不需要授权的,这一点和P3D的SpecEditor使用一样。于是,我们直接可以复制目录下的Spec文件夹到自己的电脑上,即可开始数据库的制作,电脑上可以不用安装CADWorx。这里给同学们提供单独的最新Spec文件夹下载:SpecEditor下载连接 钢结构的数据库后缀名全部为.dat文件,这些文件分别存放在C:\CADWorx 2013\Plant\Steel_I和C:\CADWorx 2013\Plant\Steel_M下,这里面存放了很多种类的型钢,
华为ME60-BRAS设备配置规范
河南网通城域网华为ME60 BRAS设备配置规范 华为技术有限公司 二00八年6月
1、系统简介 (4) 1.1 河南网通宽带城域网建设概况 (4) 1.2 河南网通华为ME60系统组网方式 (4) 1.2.1 网络概述 (4) 1.2.1 组网方式 (5) 1.3 VLAN规划原则 (6) 1.4 IP地址规划原则 (7) 2、BAS配置规范(ME60) (7) 2.1 设备基本配置 (7) 2.1.1 设置主机名 (7) 2.1.2 时区和时钟校准 (8) 2.1.3 配置管理员及其密码 (8) 2.1.4 启用服务 (8) 2.1.5 对管理员地址范围进行限定 (9) 2.1.6 timeout 时间设置 (9) 2.1.7 ACL 配置范例 (9) 2.1.8 用户域基本配置 (12) 2.1.9 安全基本配置 (13) 2.1.10 设备配置保存 (14) 2.2 设备接口配置 (14) 2.2.1 网络侧接口配置 (14) 2.2.2 loopback接口配置及描述 (15) 2.2.3 地址池的配置 (20) 2.2.4 VLAN及QINQ接口配置 (21) 2.3 路由协议配置 (22) 2.3.1 OSPF协议配置 (22) 2.4 RADIUS配置 (29) 2.4.1 本次项目中RADIUS配置参数 (30) 2.4.2 RADIUS配置范例及注释 (30) 2.4.3 RADIUS状态查看 (32) 2.4.4 RADIUS故障排除方法 (36) 2.5 QOS带宽管理 (36) 2.5.1 两类QOS配置 (36) 2.5.2 配置设备接收RADIUS服务器策略配置 (37) 2.5.3 ME60本机QOS策略配置 (37) 2.6 PPPOE配置 (39) 2.6.1 概述 (39) 2.6.2 PPPOE相关配置 (40) 2.7 用户认证域选择 (41) 2.8 反向路由检测 (42) ME60所支持的URPF (42) 2.9 DHCP RELAY配置 (43) 2.10 IP综合网管设备配置要求 (44)
极点配置直接自校正控制最小相位确定性系统Word文档
%极点配置直接自校正控制(最小相位确定性系统) 设被控对象为开环不稳定最小相位系统: ()2(1) 1.1(2)(3)0.5(4)y k y k y k u k u k --+-=-+- 期望传递函数分母多项式为: 112()1 1.32050.4966m A z z z ---=-+ 取遗忘因子=1,期望输出y r (k )为幅值为10的方波信号。 clear all;close all; a=[1 -2 1.1];b=[1 0.5];d=3; %对象参数 Am=[1 -1.3 0.5]; %期望闭环特征多项式 na=length(a)-1;nb=length(b)-1; nam=length(Am)-1; nf=nb+d-1;ng=na-1; %确定多项式A0 na0=2*na-nam-nb-1; %观测器最低阶次 A0=1; for i=1:na0 A0=conv(A0,[1 0.3-i*0.1]); %生成观测器 end AA=conv(A0,Am);naa=na0+nam;
nfg=max(naa,max(nf,ng)); %用于ufk, yuf更新 nr=na0; %R的阶次 L=400; uk=zeros(d+nb,1); ufk=zeros(d+nfg,1); %滤波输入的初值 yk=zeros(max(na,d),1); yfk=zeros(d+nfg,1); yrk=zeros(max(na,d),1); yr=10*[ones(L/4,1);-ones(L/4,1);ones(L/4,1);-ones(L/4+d,1)] ; %RELS初值设定 thetae_1=0.001*ones(nf+ng+2,1); P=10^6*eye(nf+ng+2); lambda=1; %遗忘因子 for k=1:L time(k)=k; y(k)=-a(2:na+1)*yk(1:na)+b*uk(d:d+nb); ufk(d)=-AA(2:naa+1)*ufk(d+1:d+naa)+uk(d); %滤波输入输出
CadWorx培训教程
CADWorx 培训教程 目录 系统设置 (2) Steel钢结构 (4) 1.生成柱网 (4) 2.加入钢结构 (5) 3.梯子和护栏 (5) Equipment设备 (13) 1.设备属性 (13) 2.卧式容器 (14) 3.塔 (20) 4.泵 (21) 配管 (23) 1.系统初始化 (23) 2.设定管线号 (24) 3.配管 (34) 4.中心线法绘制管道 (37) 5.Line Isolate (40) 6.Continuity连续性检测 (41) 7.ISOGEN单管图 (42) 8.平面图 (51) 管道等级和元件库 (56) 一、元件库 (56) 二、管道等级 (58)
系统设置 在桌面上双击图标,软件自动打开AUTOCAD ,并加载Plant 程序。 首先把常用的工具栏拿出来 请依照个人习惯安排ToolBars 的位置。 UCS 坐标系
加载设备模块,点击右键选择“Options”-“Files”点击“Add”找到Equipment的安装目录中Support目录,确定即可。 ADD新的 目录 然后到Plant安装目录下如:C:\CADWorx Plant 2006\Support 找到Acad.rx文件可用记事本打开,打开后新添加一行“CADWorxEquipment2006.arx”。 再启动时就会发现“Equipment”设备模块就加载上来了。
Steel钢结构1.生成柱网 点击“OK”后将自动按照定义尺寸生成柱网(由Line组成)。 可以保存设置好的 结构尺寸属性。 如果设置了偏移量 则图形可绘制梯形
自校正控制系统分析
自校正控制系统分析 摘要:本文介绍了自校正控制系统的基本结构,主要介绍了基于PID 结构的间接自校正控制系统的控制算法,并通过实例仿真结果,表明了自校正PID 控制不仅需要调整的参数少,而且还能够根据对象特性的变化在线修改这些参数,增强了控制器的自适应能力。 关键字:自校正控制系统;PID 控制;自适应能力 1 引言 自校正控制系统主要由参数估计器、控制器设计、控制器和被控对象4部分组成,如图1所示。该系统内环由被控对象和可调控制器组成,外环则由过程模型参数估计器和控制器参数计算器所组成,其任务是辨识过程参数再按选定的设计方法综合出控制器参数,用以修改内环的控制器。这类系统的特点是必须对过程或者被控对象进行在线辨识估计器,然后用对象参数估计值和事先规定的性能指标在线综合出调节器的控制参数,并根据此控制参数产生的控制作用对被控对象进行控制经过多次地辨识和综合调节参数可以使系统的性能指标趋于最优。 图1 自适应控制系统结构图 自适应控制算法对于复杂系统能够达到较好的控制精度跟踪速度以及稳定性,其实时性好,算法简单,易于实现。然而,在PID 控制中,一个至关重要的问题就是PID 参数的整定。典型的PID 参数整定方法是在获取被控对象数学模型的基础上,根据某一整定规则来确定参数。PID 参数整定的优劣,不但会影响到控制质量,而且会影响到控制系统的稳定性和鲁棒性。本文介绍了基于PID 结构的间接自校正控制。 2 基于PID 结构的间接自校正控制 自校正PID 控制算法的设计思想是: 以极点配置控制律为控制器基本形式,引入递推算法估计对象参数,并将估计结果按极点配置法进行控制器参数的设计。下面介绍自校正PID 控制器。 被控对象为 )()()()()(11k e k u z B z k y z A d +=--- (1) 式中,u(k),y(k)表示系统的输入和输出,e(k)为外部扰动,d ≥为纯延迟,且221111)(---++=z a z a z A ,21101)(---+???++=z b z b b z B b n 。 对系统(1)采用PID 控制,此时,对应的PID 控制器可表示为 )()()()()()(1111k y z R k y z R t u z F r ----= (2) ?=--)()(1 11z F z F (3) 过 程过程模型参数估计器 可调控制器 输出控制量输入 过程参数 控制器 参 数 控制器参数 计算器
DR设备配置及技术参数要求
D R设备配置及技术参 数要求 内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)
D R设备配置及技术参数要求 一、设备名称:多功能数字化X射线摄影系统(DR) 二、数量:一台 三、设备用途说明:能给病人进行全身各部位立位和卧位投照摄影 四、设备主要构成: 数字化非拼接平板探测器 X光球管 高频高压发生器及曝光控制系统 振动式滤线栅 满足立、卧位检查需要的自动化机械床台系统 专用图像采集/诊断工作站 五、主要技术及系统概述: 直接数字化平板探测器 ★5.1.1探测器类型:非晶硅平板探测器 ★5.1.2探测器TFT成像板结构:非拼接TFT整板 ★5.1.3探测器有效成像尺寸:17″×17″(43cm×43cm) 5.1.4探测器检测像素矩阵:≥3000×3000,即900万像素 5.1.5探测器检测单元尺寸:≤139um 5.1.6动态范围:≥14bit 5.1.7自曝光至图像在监视器上显示的时间:≤5s 5.1.8 DQE值(量子转换效率):≥70% 5.1.9最大空间分辨率:≥mm 数字平板探测器冷却方式为自然冷却,无须额外辅助冷却 X光球管 5.2.1功率:≥50KW 5.2.2阳极热容量:≥230kHu 5.2.3球管阳极旋转速度:3000转/分钟 5.2.4双焦点:0.6mm(小焦点)/ 1.2mm(大焦点) 5.2.5焦点功率:22/54kW 5.2.6阳极靶角:度靶角 5.2.7管电压范围:40~150kVp 高压发生器及曝光控制系统 5.3.1 类型:高频高压发生器 ★5.3.2 发生器具有网络化控制功能,与图像采集工作站及悬吊架机械系统集成控制
Intergraph CADWorx version 15.0.0.67安装教程
Intergraph CADWorx 2015 version 15.0.0.67安装教程 1、首先看一下没有安装“Intergraph CADWorx 2015 version 15.0.0.67”软件时的Autocad软 件的启动画面,如下(安装完后工具栏会有不同,请注意比较) 2、在群共享里下载:Intergraph CADWorx 2015 version 15.0.0.67.part1(约705MB)、Intergraph CADWorx 2015 version 15.0.0.67.part2(约2.18MB)两个文件。 3、右击“Intergraph CADWorx 2015 version 15.0.0.67.part1”压缩包,解压到:“Intergraph CADWorx 2015 version 15.0.0.67”文件夹。 4、打开上述文件夹,双击“setup”文件,会弹出下面对框,点next安装(可能有的机器没 有此步骤,说明之前装其它软件时,可能已经装好了,直接跳入第5步)。 5、上述https://www.360docs.net/doc/e913802381.html, Framework 4.0安装完后会出现下面对话框:
点击next出现: 确定后,
6、点上图“Yes”后,出现下面对话框: 7、再点击图标,表示嵌入到AutoCAD软件里了,后出现下面对话框:
8、点击“next”后出现下面对话框: 9、勾选,后,出现下面对话框: 向你要Serial。
10、此时打开上述文件夹“Intergraph CADWorx 2015 version 15.0.0.67”中的Crack文件夹中的“Seriall”记事本文件,输入对应的Serial号。
三、设备配置和技术要求
三、设备配置和技术要求 3.1、架构要求 本次整个基础存储体系的架构设计采用业界主流IP SAN存储区域网络架构,包括在线集中存储和近线备份存储系统建设,本次系统建设围绕着保证数据中心各类业务连续性、数据安全性和传输保证等关键要素展开,要求如下:★一、业务连续性: 1、存储设备可靠性:在线集中存储和近线备份存储设备均为双控制器冗余架构中高端存储产品,且为支持iSCSI协议的SAN存储架构,从控制器接口到后端磁盘通道,磁盘柜接口到磁盘接口均为冗余架构,控制器之间采用缓存镜像技术,同时提供缓存掉电保护,充分保证了单台设备的可靠性。 2、存储链路冗余:链路需满足双冗余要求,包括在线集中存储设备、近线备份存储设备都要求双链路接入二台存储交换机,且各接入应用服务器(共41台服务器,其中小型机8台)均需双链路接入二台存储交换机;要求整个SAN 存储区域网络为冗余架构,可实现从一台服务器到其对应的数据卷至少2条以上的访问通道(每台应用服务器需要新增二个独立服务器专用千兆网卡,共需82块网卡),其中有一条链路故障不会造成业务中断。 3、存储设备冗余:此方案中不仅在线存储设备本身可靠性高,同时建设近线备份存储设备,通过基于存储控制器的数据复制功能,保证了在线存储设备数据大集中的完整备份副本;当现在线集中存储设备出意外时,业务可切换至近线备份存储设备运行,极大保证业务连续性,不需等待数据恢复过程。 ★二、数据安全性: 1、对于在线集中存储设备的各类业务数据,通过基于存储控制器的数据复制技术实现数据在近线备份存储设备上保留一份完整数据副本,整个备份过程不影响各前端应用服务器的运行,由存储控制器独立完成,不占用各应用主机资源,对业务系统无影响。且需要完全确保近线备份存储设备上的数据副本是成功,要求备份数据是还可被应用主机读写,用于检查备份数据的正确性和完整性。 2、对于近线备份存储设备中的数据,提供基于存储控制器的连续时间点数据快照保护功能,可实现多个不同的快照时间点;可以有效防止“软灾难”的发生,如在人为发生误操作、病毒等引起数据丢失时,可以快速将数据恢复到之前的某一合适时间点,确保数据的安全性。
设备技术参数与配置要求
设备技术参数与配置要求: 序号产品名称规格参数 仰卧起坐板(平台)锻炼腹部、背部肌肉力量及柔韧性。主立柱采用Φ*优质钢管;人体易接触区域不存在卡夹、钩挂、缠绕结构;开口向上且角度小于°的型结构;仰卧平台边框采用大圆角弧形过渡,圆角半径;台面边框规格为*方管,壁厚;仰卧板面为厚度的整体优质钢板,板面焊接内加底衬管支撑,圆孔直径小于;采用直埋式结构。器材地面以上尺寸:长*宽*高**() 上肢牵引器产品规格:(长宽高):×× 不允许存在衣服、头发钩挂或缠绕危险。 牵引把手质量不应超过 牵引结构应设置内限位结构。 器材其它结构应符合中的相关规定. 有明确的安装日期、安全使用年限及器材生产编码安装方式:直埋 三位压腿器增强人体腰、腿部的肌肉力量及柔韧性,消除下肢疲劳。四主立柱结构,满足人同时使用;横杠管材为(Φ*)优质钢管,杠面宽度;主立柱采用Φ*优质钢管;立柱顶端低于横杠,不存在钩挂突出物; 采用直埋式结构。器材地面以上尺寸:长*宽*高**() 太极推揉器锻炼肩、肘、髋、腕、膝等关节部位的活动能力,对肩周疾病有一定的辅助治疗作用。主立柱采用Φ*优质钢管;立柱管端采用钢制盖帽,避免雨水淋入;推揉盘设置两组,每组个,适合不同高度的人群使用,推揉盘采用优质钢板拉伸成型,全封闭式,直径为,全封闭式的推揉盘避免了条幅旋转的剪切力伤害;推揉盘两内侧之间距离(>),内加阻尼器(阻尼力),使用更安全;推揉盘支撑管规格为Φ* 优质钢管;转轴直径,材质为钢,调质处理;器材中各开口符合中的规定。器材地面以上尺寸:长*宽*高**() 双位太空漫步机提高人体有氧运动能力和身体平衡能力,增强身体协调性,使功能性和趣味性相结合。主立柱采用Φ*优质钢管,满足标准中的静载荷、稳定性试验要求;摆杆有可靠内限位装置,且单侧摆动幅度不大于°;摆杆为Φ*,扶手管尺寸为Φ*;摆杆与主立柱内侧的距离为(>);踏板主运动方向和易滑脱方向设置高度不小于、长度大于踏板周长的防滑脱凸台,凸台棱边倒角;踏板单脚防滑面不小于(*)2,摩擦系数不小于;摆动部件下缘距地面高度为(>);相邻运动的两踏板间距为(>);转轴直径,材料为钢,并调质处理;踏板前后设置防止碰撞第三者的缓冲垫;采用直埋式结构。器材地面以上尺寸:长*宽*高**()注:本项目须以件的单位价格作为单品报价。 双人大转轮锻炼人体上肢肌肉,增强肩关节柔韧性和灵活性。主立柱采用Φ*优质钢管,满足标准中的静载荷、稳定性试验要求;立柱管端采用钢制盖帽,避免雨水淋入;大转轮设置个,适合不同高度的人群使用,大转轮盘采用优质钢板拉伸成型,卷边设计,全封闭式,直径为,全封闭式的大转轮避免了条幅旋转的剪切力伤害;大转轮内侧与立柱之间距离为(>),内加阻尼器(),使用更安全;大转轮支撑管为Φ*优质无缝钢管;转轴直径为,材质为,调质处理;采用直埋式结构。器材地面以上尺寸:长*宽*高**() 双杠可进行双杠臂屈伸、双杠举腿等多种训练,增强上肢肌群力量及腰腹肌力量,对提升整体耐力及肺活量也有一定帮助。主立柱采用Φ*优质钢管,满足标准中的静载荷、稳定性试验要求;两杠内侧距离,缸长,纵向立柱中心距为;杠
基于输出反馈的区域极点配置
第22卷第2期南 京 理 工 大 学 学 报Vol.22No.21998年4月 Journal of Nanjing University of Science and Technology Apr.1998 基于输出反馈的区域极点配置 X 王子栋X X 郭 治 (南京理工大学信息学院,南京210094)摘要 该文研究输出反馈情形下线性定常连续及离散系统区域极点配置的统一代数刻划问题,即利用完全参数化方法,设计输出反馈控制器,使闭环极点配置于指定圆形区域内。文中导出了期望输出反馈控制器存在的充要条件,并进一步给出了这类控制器的全部参数化刻划。最后,得到了若干有益的推论,包括线性离散及连续系统稳定化控制器的统一代数表示等。 关键词 线性系统,输出反馈,极点配置,参数法,代数刻划 分类号 TP 202.1,T P 214.1 众所周知,线性定常系统的稳态及动态特性直接受其极点所在位置的影响,因而极点配置问题一直是控制理论研究中基本而重要的课题之一,其在工程实践中也具有明显的应用背景,如飞行控制系统的设计以及柔性结构的振动控制等[1]。迄今为止,精确极点的配置问题已得到了很好的研究。在过去的十年中,区域极点的配置问题也开始受到充分的注意,涌现出一批成果[2][3]。 目前,区域极点配置的相关文献中的大部分均是针对某性能指标给出具体的设计方法,且均集中于状态反馈情形,缺乏一定的通用性。本文对连续及离散线性定常系统使用统一的代数方法,给出了配置闭环极点至给定圆形区域的输出反馈控制器的全部参数化刻划,为区域极点配置问题提供了一条具有理论意义及应用价值的新途径。 1 问题的描述 考虑线性定常连续系统x a (t )=A x (t )+B u (t ),y (t )=Cx (t )及线性定常离散系统x (k +1)=A x (k )+Bu (k ),y (k )=Cx (k ),其中x ∈R n 为状态,u ∈R m 为控制输入,y ∈R p 为测量输出,A 、B 、C 为适维已知常数阵。(A ,B )及(A ,C )分别为可控和可观的。 考虑圆形区域D (A ,r ),其中在连续时间情形D (A ,r )表示圆心在A +j 0(A <0)处、半径为r (r <-A )的圆,在离散时间情形D (A ,r )表示单位圆内圆心位于A +j 0、半径为r 的圆。这里均考虑复平面。 X X XX 王子栋 男 32岁 副教授 国家自然科学基金及高校博士学科点专项科研基金资助项目 本文于1997年1月14日收到
CADWorx2013 简易操作手册
Intergraph CADWorx Plant Suite 三维工厂设计软件
基于AutoCAD平台的三维工厂设计软件 CADWorx 2013 Plant Suite Intergraph公司即将推出新一代基于AutoCAD平台的CADWorx Plant Suite三维工厂设计套装软件。CADWorx Plant Pro采用全新的建模模式,是继Smart Plant 3D,PDS后又一款具有超前革新意识的力作。Intergraph将继续开发并增强CADWorx软件功能,并努力将其变成设计师手中最好的工具。最新版本的CADWorx 2013已经发布,几大重要功能更新如下: 新的等级、库文件:整合库和等级文件,使界面更加人性化,便于用户管理。用户可以选择不同的管道等级,设计各种类型的管道,如对焊,丝扣,承插焊,法兰管道,FRP/PVC管道,卫生级食品,医药,消防管道设计和布置。软件内置了美标、德标、国标、石化、化工的等级和库文件。 智能建模:完全智能化建模,可以随时拖拉出任何需要的元件,并能自动匹配等级与尺寸。用户可以采用智能拖拽、搭积木法、中心线法等多种方式进行管道建模。 组件功能:常用的阀组、泄放装置、配管布置可以做成组件,多次使用,减少重复的建模过程。 改变尺寸、等级:根据项目需求,如需更改管道的尺寸和等级,只需一个命令即可完成,并保证布置的准确性。 软件集成功能:与管道应力分析软件CAESAR II和压力容器强度设计软件PV Elite双向接口,与SmartPlant 3D、Foundation的集成功能。
亲身体验 介绍 本次交流会的主要体验内容有创建如下的三维工厂模型: z钢结构模型 z设备模型 z智能管道建模 z支吊架 z保温材料 z碰撞检查 z连续性检查 z生成单线图,平面布置图 熟悉最新软件CADWorx Plant Professional 2013的新功能(库和等级的创建、智能建模、更改尺寸、更改等级、组件功能等)。希望在本次交流会结束后,您会对CADWorx Plant Pro有一个全新的了解。
控制系统的极点配置设计法
控制系统的极点配置设计法 一、极点配置原理 1.性能指标要求 2.极点选择区域 主导极点: n s t ζω 4 = ;当Δ=0.02时,。 n s t ζω 3 = 当Δ=0.05时,
3.其它极点配置原则 系统传递函数极点在s 平面上的分布如图(a )所示。极点s 3距虚轴距离不小于共轭复数极点s 1、s 2距虚轴距离的5倍,即n s s ξω5Re 5Re 13=≥(此处ξ,n ω对应于极点s 1、s 2) ;同时,极点s 1、s 2的附近不存在系统的零点。由以上条件可算出与极点s 3所对应的过渡过程分量的调整时间为 135 1 451s n s t t =?≤ ξω 式中1s t 是极点s 1、s 2所对应过渡过程的调整时间。 图(b )表示图(a )所示的单位阶跃响应函数的分量。由图可知,由共轭复数极点s 1、s 2确定的分量在该系统的单位阶跃响应函数中起主导作用,即主导极点。因为它衰减得最慢。其它远离虚轴的极点s 3、s 4、s 5 所对应的单位阶跃响应衰减较快,它们仅在极短时间内产生一定的影响。因此,对系统过渡过程进行近似分析时。可以忽略这些分量对系统过渡过程的影响。 n x o (t) (a ) (b ) 系统极点的位置与阶跃响应的关系
二、极点配置实例 磁悬浮轴承控制系统设计 1.1磁悬浮轴承系统工作原理 图1是一个主动控制的磁悬浮轴承系统原理图。主要由被悬浮转子、传感器、控制器和执行器(包括电磁铁和功率放大器)四大部分组成。设电磁铁绕组上的电流为I0,它对转子产生的吸力F和转子的重力mg相平衡,转子处于悬浮的平衡位置,这个位置称为参考位置。 (a)(b) 图1 磁悬浮轴承系统的工作原理 Fig.1 The magnetic suspension bearing system principle drawing 假设在参考位置上,转子受到一个向下的扰动,转子就会偏离其参考位置向下运动,此时传感器检测出转子偏离其参考位置的位移,控制器将这一位移信号变换成控制信号,功率放大器又将该控制信号变换成控制电流I0+i,控制电流由I0增加到I0+i,因此,电磁铁的吸力变大了,从而驱动转子返回到原来的平衡位置。反之,当转子受到一个向上的扰动并向上运动,此时控制器使得功率放大器的输出电流由I0,减小到I0-i,电磁铁的吸力变小了,转子也能返回到原来的平衡位置。因此,不论转子受到向上或向下的扰动,都能回到平衡状态。这就是主动磁轴承系统的工作原理。即传感器检测出转子偏移参考点的位移,作为控制器的微处理器将检测到的位移信号变换成控制信号,然后功率放大器将这一控制信号转换成控制电流,控制电流在执行磁铁中产生磁力从而使转子维持其悬浮位置不变。悬浮系统的刚
系统稳定性分析 、利用MATLAB 实现极点配置、设计状态观测器
实验报告 实验名称系统稳定性分析、利用MATLAB实现极点配置、设计状态观测器系专业班 姓名学号授课老师 预定时间实验时间实验台号 一、目的要求 掌握系统稳定性的概念。学会使用MATLAB确定线性定常系统和非线性定常系统的稳定性。 掌握状态反馈和输出反馈的概念及性质。 掌握利用状态反馈进行极点配置的方法。学会用MATLAB求解状态反馈矩阵。 掌握状态观测器的设计方法。学会用MATLAB设计状态观测器。 熟悉分离定理,学会设计带有状态观测器的状态反馈系统。 二、原理简述 函数eig()的调用格式为V=eig(A)返回方阵A的特征值。 函数roots()的调用格式为roots(den),其中den为多项式的系数行向量。计算多项式方程的解。 函数pole()的调用格式为pole(G),其中G为系统的LTI对象。计算系统传递函数的极点。 函数zpkdata()的调用格式为[z,p,k]=zpkdata(G,’v’),其中G为系统LTI对象。返回系统的零点、极点和增益。 函数pzmap()的调用格式为pzmap(G),其中G为LTI对象。绘制系统的零点和极点。 对于线性定常连续系统x Ax,若A是非奇异矩阵,则原点是其唯一的平衡状态。统在原点处大范围渐近稳定的充分条件是:存在李氏函数v(x)x T px,且v(x)正定,v(x)负定。 如果SISO线性定常系统完全能控,则可通过适当的状态反馈,将闭环系统极点配置到 任意期望的位置。 MATLAB提供的函数acker()是用Ackermann公式求解状态反馈阵K。 MATLAB提供的函数place()也可求出状态反馈阵K。 如果线性定常系统完全能观测,则可构造全维(基本)观测器。全维(基本) 状态观测器的状态方程为观测器的反馈矩阵L为 其中为系统的能观测矩阵。 其中为期望的状态观测器的极点。观测器设计是极点配置的对偶问题,故可利用函数acker()和place()进行求解。