Object-Detection
目标检测(Object Detection)原理与实现
目标检测(Object Detection)原理与实现基于阈值图像处理的目标检测从今天起开始要写一些关于目标检测的文章,涵盖从简单的阈值图像处理检测、霍夫变换(hough transform)检测、模版匹配检测(刚体匹配)、AAM+ASM+ACM(非刚体)匹配检测到近代机器学习方法检测,尽量贴一些代码,这些很实用。
本篇就从阈值图像处理检测开始。
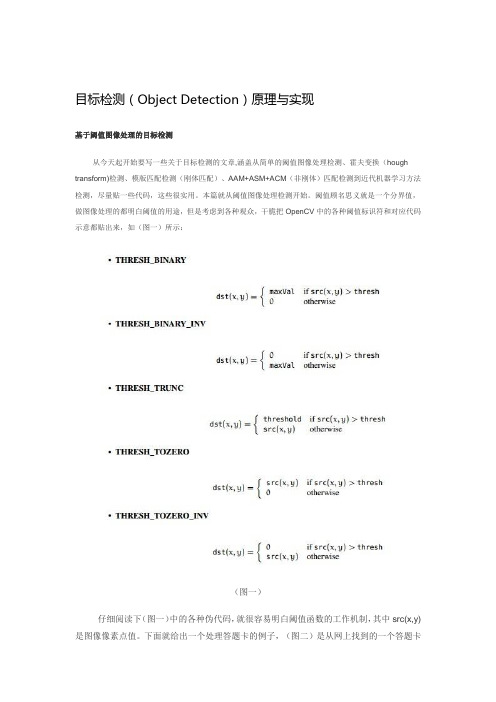
阈值顾名思义就是一个分界值,做图像处理的都明白阈值的用途,但是考虑到各种观众,干脆把OpenCV中的各种阈值标识符和对应代码示意都贴出来,如(图一)所示:(图一)仔细阅读下(图一)中的各种伪代码,就很容易明白阈值函数的工作机制,其中src(x,y)是图像像素点值。
下面就给出一个处理答题卡的例子,(图二)是从网上找到的一个答题卡样图,我们的目标是检测到哪些选项被涂黑了,然后根据坐标判定是哪个数字,其实根据坐标是有依据的,因为答题卡四个角有一些对准线,对齐后用扫描仪扫描后紧跟着经过算法处理就可以判断出考生选项,本篇文章就简化流程,考虑到涂的选项是黑色的,因此我们使用第二个阈值方法,经过处理后如(图三)所示。
(图二)(图三)几乎perfect,嘿嘿,下面把代码也贴出来,python版本的。
import numpy as npimport cv2img=cv2.imread('anwser_sheet.jpg')grey=cv2.cvtColor(img,cv2.cv.CV_BGR2GRAY)retval,grey=cv2.threshold(grey,90,255,cv2.cv.CV_THRESH_BINARY_INV)grey=cv2.erode(grey,None)grey=cv2.dilate(grey,None)contours,hierarchy=cv2.findContours(grey.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMP LE)newimg=np.zeros_like(grey)cv2.drawContours(newimg, contours, -1, 255)cv2.imshow('test',newimg)cv2.imwrite("processed.jpg",newimg)cv2.waitKey()代码流程先是读取图像文件,接着转成灰度图,接着做个开运算(腐蚀后再膨胀),接着阈值处理,最后把目标轮廓画出,根据目标块的坐标可以大概的推算出对应的数字,接着秀一下打印出某个涂项,比如最后一个,那么只需要把cv2.drawContours(newimg, contours, -1, 255) 改成cv2.drawContours(newimg, contours, 0, 255)第三个参数为负数表示打印所有轮廓,0表示打印最后一个选项,打印是倒着数的。
Object Detection with Discriminatively Trained Part Based Models【中文译】【转】

使用判别训练的部件模型进行目标检测Pedro F. Felzenszwalb, Ross B.Girshick, David McAllester and Deva Ramanan使用判别训练的部件模型进行目标检测 Object Detection with Discriminatively Trained Part Based Models摘要本文介绍了一个基于混合多尺度可变形部件模型(mixtures of multiscale deformablepart model) 的目标检测系统。
此系统可以表示各种多变的目标并且在PASCAL目标检测挑战赛上达到了目前最优结果(state-of-the-art)。
虽然可变形部件模型现在很流行,但它的价值并没有在类似PASCAL这种较难的测试集上进行展示。
此系统依赖于使用未完全标注(partially labeled)的样本进行判别训练的新方法。
我们提出了一种间隔敏感(margin-sensitive)的难例挖掘方法(data-mining hard negativeexample),称为隐藏变量SVM(latent SVM, LSVM),是MI-SVM 加入隐藏变量后的重新表示。
LSVM的训练问题是一个半凸规划(semi-convex)问题,但如果将正样本的隐藏变量的值指定后,LSVM的训练问题变为凸规划问题。
最终可以使用一个迭代训练方法来解决,此迭代算法不断交替地固定正样本的隐藏变量和最优化目标函数。
关键词目标识别(ObjectRecognition),可变形模型(Deformable Models),图结构模型(Pictorial Structures),判别训练(Discriminative Training),隐藏变量SVM(Latent SVM)1 引言目标检测是计算机视觉领域内一项基础性的工作。
本论文研究在静态图片中检测并定位某一类目标(例如人或车)的问题。
few-shot object detection,讲解 -回复

few-shot object detection,讲解-回复什么是few-shot目标检测?目标检测是计算机视觉领域的一项关键任务,其目的是通过算法和模型来识别图像中特定物体的位置和类别。
传统的目标检测方法通常依赖于大规模标注数据进行训练,这对于许多应用而言是一种挑战,因为获取大量标注数据是非常耗时和昂贵的。
而few-shot 目标检测是一种解决这一问题的方法,它可以在只有少量标注样本的情况下进行目标识别。
Few-shot 目标检测可以通过学习从已有的多个类别中分类样本的能力,来实现在新类别上的目标检测。
通常,few-shot 目标检测包含两个主要阶段:预训练和微调。
在预训练阶段,模型通过大规模标注数据进行训练,学习从图像中提取目标特征和分类样本的能力。
在微调阶段,模型通过使用少量标注样本来适应新的目标类别。
实现few-shot 目标检测的方法可以分为基于检测器和基于分类器的方法。
基于检测器的方法通常是在目标检测模型的基础上进行改进,以实现few-shot 目标检测任务。
这些方法尝试通过增强模型的感知能力来减少对于大量标注数据的依赖。
例如,可以利用注意力机制来引导模型关注新类别的目标。
基于分类器的方法则将few-shot 目标检测任务转化为few-shot 分类任务。
这些方法首先通过预训练一个分类器模型,然后通过微调该分类器来实现目标检测。
除了基于模型的方法外,还有一些基于生成对抗网络(GAN)的方法用于few-shot 目标检测。
GAN 是一种生成模型,通过使用从噪声中生成样本的能力来进行训练。
在few-shot 目标检测中,可以使用GAN 来生成新目标的特征,以扩充训练数据集,从而提高目标检测的性能。
分析现有的few-shot 目标检测方法,我们可以发现一些共同的挑战。
首先,样本之间的差异性是一个重要的挑战。
在少样本的情况下,不同目标之间可能具有很大的差异性,模型需要学习如何在不同目标之间建立通用的特征表示。
coco 2017 object detection task划分

coco 2017 object detection task划分Coco 2017数据集是一个广泛使用的通用目标检测数据集。
该数据集包含超过33万张图像,共标注了超过80种不同的物体类别,旨在支持目标检测、实例分割、关键点检测等任务。
Coco 2017数据集的划分主要包括训练集、验证集和测试集。
训练集是用于模型训练的数据集,Coco 2017训练集共包含超过110,000张图像,标注了超过860,000个物体实例。
在训练过程中,可以使用这个数据集来学习目标检测模型的参数,以便模型能够准确地检测和分类不同物体。
验证集是用于调整和优化模型参数的数据集,Coco 2017验证集包含了超过5,000张图像,标注了超过40,000个物体实例。
在训练过程中,可以使用这个数据集来评估模型的性能,并采取相应的措施进行改进。
例如,可以根据验证集上的性能指标来调整学习率、添加正则化等。
测试集是用于评估模型在未知数据上的泛化能力的数据集,Coco 2017测试集共包含超过20,000张未标注图像。
在测试过程中,可以使用训练好的模型对这些图像进行目标检测,并将检测结果提交到Coco评测服务器进行评估。
通过对测试集上的评估,可以了解模型在真实场景中的性能,并与其他模型进行比较。
为了评估目标检测模型的性能,Coco 2017数据集提供了一些评测指标,包括准确率、召回率、平均精确度等。
在目标检测任务中,准确率是指检测到的物体中正确分类的比例;召回率是指正确分类的物体与实际物体数目的比例;平均精确度是计算每个类别的平均精确度,并将其平均值作为最终的评估指标。
在文献中,可以参考以下几类相关内容来获取更多关于Coco 2017 object detection task划分的信息。
1. 论文和学术文章: 关于Coco 2017数据集以及目标检测任务的划分,有很多研究人员在论文和学术文章中进行了深入讨论和研究。
可以搜索相关的学术论文,查找关于Coco 2017数据集划分和目标检测任务划分的内容。
目标检测模型之YOLO系列

目标检测模型之YOLO系列摘要:目标检测(Object Detection)是计算机视觉领域的基本任务之一,学术界已有较长时间深入地研究历史。
近些年随着深度学习技术的火热发展,目标检测算法也从基于手工特征的传统算法转向了基于深度神经网络的检测技术。
本文广泛调研国内外目标检测方法,主要介绍一阶段目标检测算法——YOLO(You Only Look Once)系列的发展历程。
关键词:目标检测,YOLO,发展历程一、研究背景从 2006 年以来,在 Hinton、Bengio、Lecun 等人的引领下,大量深度神经网络的论文被发表,尤其是 2012 年,Hinton课题组首次参加 ImageNet图像识别比赛,其通过构建的 CNN 网络AlexNet[1]一举夺魁,从此神经网络开始受到广泛的关注。
深度学习利用多层计算模型来学习抽象的数据表示,能够发现大数据中的复杂结构,目前,这项技术已成功地应用在计算机视觉、自然语言处理、语音识别等领域在内的多种模式分类问题上。
目标检测的任务是找出图像或视频中感兴趣的物体,同时能够定位出其位置。
Joseph Redmon于2015年提出YOLO算法[2]是单阶段目标检测算法的开山鼻祖,跟R.Girshick于2014年提出的RCNN[3]系列两阶段目标算法一起引领基于深度学习的目标检测算法的发展。
两者的主要区别在于两阶段算法需要先生成候选框(一个有可能包含待检物体的预选框),然后进一步实现目标检测。
而一阶段算法会直接在网络中提取特征来预测目标所属的类别和位置。
两者优缺点及主要算法汇总如下表1所示:表1 One-stage和Two-stage算法比较从目前的研究来看,部署端一般使用One-stage算法,而在One-stage算法中应用最多的是具备实时检测能力的YOLO系列,因此本文着重介绍YOLO系列。
二、YOLO的设计思想YOLO,即神经网络只需要看一次图片,就能输出结果。
目标检测大模型预训练框架

目标检测大模型预训练框架Title: Object Detection Large Model Pre-training Framework目标检测大模型预训练框架Object detection is an important task in computer vision, and large models have shown great advantages in this field.However, training large models for object detection is challenging due to the high computational cost and the need for large-scale annotated data.In this paper, we propose an Object Detection Large Model Pre-training Framework, which aims to address these challenges.目标检测是计算机视觉领域的一个重要任务,大型模型在此领域表现出巨大的优势。
然而,由于计算成本高昂和需要大规模标注数据,训练大型模型进行目标检测是一项挑战。
本文提出了一种目标检测大型模型预训练框架,旨在解决这些挑战。
Our framework first pre-trains a large model on a large-scale image dataset, which provides a strong base for the subsequent object detection task.Then, we finetune the pre-trained model on a target detection dataset, and use a series of techniques to improve the model"s performance.Our experiments show that our framework can achieve state-of-the-art results on various object detection benchmarks.我们的框架首先在大规模图像数据集上预训练一个大型模型,这为后续的目标检测任务提供了强大的基础。
机器学习模型的迁移学习技术及应用案例研究

机器学习模型的迁移学习技术及应用案例研究迁移学习是指通过将从一个领域获得的知识或经验应用于另一个领域的过程。
在机器学习领域,迁移学习已经成为一项重要的研究课题,并且在实际应用中取得了广泛的成功。
本文将介绍机器学习模型中常用的迁移学习技术,并以几个应用案例来展示其实际应用的效果。
一、迁移学习技术1. 领域适应(Domain Adaptation)领域适应是迁移学习中一种常见的技术方法,它通过在源领域训练的模型上进行调整,以使其适应目标领域的数据分布。
具体而言,领域适应可以通过特征选择、特征映射和分布匹配等方式来实现。
其中,特征选择和特征映射主要用于有效地选择和转换源领域的特征,使其在目标领域上能够起到更好的效果。
分布匹配则是通过最小化源领域和目标领域的分布差异来实现对模型的调整。
2. 迁移学习网络(Transfer Learning Network)迁移学习网络是一种特殊的神经网络结构,它将源领域和目标领域的数据分别输入到网络中,从而同时学习两者之间的共享特征和领域特定特征。
通过这种方式,模型可以同时在源领域和目标领域中进行学习,从而提高在目标领域上的性能。
迁移学习网络的关键是设计合适的网络结构和损失函数,以有效地利用源领域的知识和数据。
3. 增量学习(Incremental Learning)增量学习是一种特殊的迁移学习技术,它可以在已有模型的基础上继续学习新的知识和数据。
通常情况下,增量学习需要设计适应性的模型结构和参数更新策略,以适应新的数据和任务。
增量学习在实际应用中非常有用,特别是在涉及到大规模数据和长期学习的场景下。
二、应用案例研究1. 目标检测(Object Detection)目标检测是计算机视觉中的一个重要任务,它可以识别图像或视频中的特定对象并标注出其位置。
在目标检测中,迁移学习技术被广泛应用于提高模型的性能和泛化能力。
例如,可以使用在大规模图像数据集上预训练的模型作为初始模型,然后通过微调或特征提取的方式将其应用于目标检测任务。
目标检测学术英语
目标检测学术英语Object detection is a fundamental task in computer vision, which aims to locate and classify objects within an image or video. It has a wide range of applications, including autonomous vehicles, surveillance systems, and augmented reality. In recent years, deep learning-based object detection methods have achieved remarkable performance, outperforming traditional methods in terms of accuracy and efficiency.There are several popular object detection frameworks, such as YOLO (You Only Look Once), SSD (Single Shot Multibox Detector), and Faster R-CNN (Region-based Convolutional Neural Network). These frameworks differ in their approach to object detection, with some prioritizing speed and others prioritizing accuracy. YOLO, for example, is known for its real-time performance, while Faster R-CNN is renowned for its accuracy.One of the key challenges in object detection is handling occlusions, variations in scale, and cluttered backgrounds. This requires the use of sophisticated algorithms and network architectures to effectively detectobjects under these conditions. Additionally, object detection models need to be robust to changes in lighting, weather, and other environmental factors.In recent years, there has been a surge of interest in improving object detection performance through the use of attention mechanisms, which allow the model to focus on relevant parts of the image. This has led to the development of attention-based object detection models, such as DETR (DEtection TRansformer) and SETR (SEgmentation-TRansformer).Furthermore, the integration of object detection with other computer vision tasks, such as instance segmentation and pose estimation, has become an active area of research. This integration allows for a more comprehensive understanding of the visual scene and enables more sophisticated applications.In conclusion, object detection is a critical task in computer vision with a wide range of applications. Deep learning-based methods have significantly advanced the state-of-the-art in object detection, and ongoing researchcontinues to push the boundaries of performance and applicability.目标检测是计算机视觉中的一个基本任务,旨在定位和分类图像或视频中的对象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
it has been difficult to establish their value in practice. On difficult datasets deformable part models are often outperformed by simpler models such as rigid templates [10] or bag-of-features [44]. One of the goals of our work is to address this performance gap. While deformable models can capture significant variations in appearance, a single deformable model is often not expressive enough to represent a rich object category. Consider the problem of modeling the appearance of bicycles in photographs. People build bicycles of different types (e.g., mountain bikes, tandems, and 19th-century cycles with one big wheel and a small one) and view them in various poses (e.g., frontal versus side views). The system described here uses mixture models to deal with these more significant variations. We are ultimately interested in modeling objects using “visual grammars”. Grammar based models (e.g. [16], [24], [45]) generalize deformable part models by representing objects using variable hierarchical structures. Each part in a grammar based model can be defined directly or in terms of other parts. Moreover, grammar based models allow for, and explicitly model, structural variations. These models also provide a natural framework for sharing information and computation between different object classes. For example, different models might share reusable parts. Although grammar based models are our ultimate goal, we have adopted a research methodology under which we gradually move toward richer models while maintaining a high level of performance. Improving performance by enriched models is surprisingly difficult. Simple models have historically outperformed sophisticated models in computer vision, speech recognition, machine translation and information retrieval. For example, until recently speech recognition and machine translation systems based on n-gram language models outperformed systems based on grammars and phrase
• P.F. Felzenszwalb is with the Department of Computer Science, University of Chicago. E-mail: pff@ • R.B. Girshick is with the Department of Computer Science, University of Chicago. E-mail: rbg@ • D. McAllester is with the Toyota Technological Institute at Chicago. Email: mcallester@ • D. Ramanan is with the Department of Computer Science, UC Irvine. E-mail: dramanan@
F
1
I recognition is one of the fundamental challenges in computer vision. In this paper we consider the problem of detecting and localizing generic objects from categories such as people or cars in static images. This is a difficult problem because objects in such categories can vary greatly in appearance. Variations arise not only from changes in illumination and viewpoint, but also due to non-rigid deformations, and intraclass variability in shape and other visual properties. For example, people wear different clothes and take a variety of poses while cars come in a various shapes and colors. We describe an object detection system that represents highly variable objects using mixtures of multiscale deformable part models. These models are trained using a discriminative procedure that only requires bounding boxes for the objects in a set of images. The resulting system is both efficient and accurate, achieving state-ofthe-art results on the PASCAL VOC benchmarks [11]– [13] and the INRIA Person dataset [10]. Our approach builds on the pictorial structures framework [15], [20]. Pictorial structures represent objects by a collection of parts arranged in a deformable configuration. Each part captures local appearance properties of an object while the deformable configuration is characterized by spring-like connections between certain pairs of parts. Deformable part models such as pictorial structures provide an elegant framework for object detection. Yet
1
Object Detection with Discriminatively Trained Part Based Models
Pedro F. Felzenszwalb, Ross B. Girshick, David McAllester and Deva Ramanan
Abstract—We describe an object detection system based on mixtures of multiscale deformable part models. Our system is able to represent highly variable object classes and achieves state-of-the-art results in the PASCAL object detection challenges. While deformable part models have become quite popular, their value had not been demonstrated on difficult benchmarks such as the PASCAL datasets. Our system relies on new methods for discriminative training with partially labeled data. We combine a marginsensitive approach for data-mining hard negative examples with a formalism we call latent SVM. A latent SVM is a reformulation of MI-SVM in terms of latent variables. A latent SVM is semi-convex and the training problem becomes convex once latent information is specified for the positive examples. This leads to an iterative training algorithm that alternates between fixing latent values for positive examples and optimizing the latent SVM objective function. Index Terms—Object Recognition, Deformable Models, Pictorial Structures, Discriminative Training, Latent SVM