某火炮武器系统电气控制软件测试实践
测试技术火炮系统报告

测试技术基础报告火炮制动性能检测系统一、现有火炮制动检测系统调研牵引式火炮良好的制动性能是火炮在行军时的安全保障,在投入使用之前必须检测调试到安全范围内。
而传统的检测方法是通过拖车牵引火炮到指定速度后制动通过炮轮与地面的摩擦痕迹来测算火炮的制动参数。
这种方法费时费力并且对炮轮也有磨损。
最重要的是,它测得的各项参数误差较大。
我们小组设计的火炮制动性能测试系统通过模拟火炮的行军能利用较少的资源更好地测试火炮的制动性能现有火炮制动检测系统都是采用双电动机来驱动,系统采用惯性制动原理,电机分别驱动的滚筒对给予火炮炮轮相同的检测速度。
电机转速由微机通过变频器控制。
系统中的滚筒相当于一个移动的路面,检测台上各对滚筒分别带有飞轮,起惯性质量与受检火炮行进时的惯性质量相当。
因此滚筒传动系统具有相当于火炮在道路上行驶的惯性,制动时,轮胎对滚筒表面产生阻力,虽然这时驱动滚筒传动系统的动力(电动机的动力)已被切断。
但由于滚筒传动系统具有一定的惯性因而滚筒表面将相对于车轮移过一定距离。
这种检测台的主要检测参数是两轮的制动距离,同时还可以测得制动时间和减速度等参数。
电机与滚筒轴分离后火炮开始制动,与滚筒轴相连的编码器将分别把火炮炮轮从制动时刻到制动结束的转速准确测出。
传输到微机处理后能得到上述参数,再结合两轮所测参数还可以计算出其制动时的跑偏量。
二、我们的设计方案创新点:采用棘轮机构使用单电机驱动由于采用的是单电机驱,因而也只使用一个变频器,与现有现有火炮制动检测系统相比,不仅结构简单而且更经济。
具体方案:采用惯性制动原理,电机驱动带有棘轮机构的轴转动,由棘轮机构分别驱动两侧的滚筒,对给予火炮炮轮相同的检测速度。
电机转速由微机通过变频器控制。
系统中的滚筒相当于一个移动的路面,检测台上各对滚筒分别带有飞轮,起惯性质量与受检火炮行进时的惯性质量相当。
因此滚筒传动系统具有相当于火炮在道路上行驶的惯性,制动时,轮胎对滚筒表面产生阻力,虽然这时驱动滚筒传动系统的动力(电动机的动力)已被切断。
某新型火炮随动系统的性能测试系统设计
2 C N 总 线 通 信 接 口 电 路 . 2 A 内置 于 U 0 A的 C N总 线 控 制 器 可 以 用来 完 成 C N 47 A A
须 在 双 绞 线 两 端 f C两 个 l 0Q 的 匹 配 电 阻 来 消 除 长 线 反 R X D 连 接 一¨一¨¨ 一 一 D 一v T C X e 2
出 的 信 号 . 后 对 采 集 然 数据进行处 理分析 。 D P与 C N控 制 器 之 S A 间 以 响 应 中 断 方 式 实 现 通 讯 。 过 数据 处理 经 后 的 数 据 送 给 L D显 C
Байду номын сангаас
示。 以对数据进行保存
和 分 析 , 扫 描 有 效 按 并 键 , 断 键 值 , 进 入 判 并
R4 t 3 0】 9 【
B I N N
VC C
图 3 C N 总 线 通信 接 口 电路 A
3 测 试 系统应 用 软件 设 计
31 软 件 总 体 设计 . I 30 F 4 7 的 软 件 设 计 和 调 试 是 在 D P集 成 开 发 MS 2 L’ o A 2 S 环 境 C S 0 0下 进 行 的 。 用 C语 言 和 汇 编 语 言 相 结合 的方 C 20 采
的 T S  ̄ P O设 置 为 0 1选 8分 频 . 定 时 器 3每 隔 T 8 P 2TS l。 则 =/ 4 z02m 计 数 一 次 。 测速 主程 序 如 图 5所示 。 0MH = . 8
行 初 始 化 , 动 D P定 时 器 和捕 获 单 元 。 集 转 速 传 感 器 输 启 S 采
信 号 的测 量 。本 系 统 时钟 频率 为 4 z计 数 器最 大 计 数 为 0MH 。
某火炮武器系统电气控制软件测试实践

某火炮武器系统电气控制软件测试实践
周云卿;李锋;顾涛;马斌
【期刊名称】《火炮发射与控制学报》
【年(卷),期】2010(000)004
【摘要】针对火炮武器系统软件的特点,利用Testbed和RTInsight搭建了嵌入式实时系统的软件测试平台,通过将Testbed软件测试工具的静态分析与代码插装技术和RTinsight实时数据采集分析设备相结合的方式,以某火炮电气控制软件为测试实例,对其进行了静态分析、文档审查与动态测试.为提高火炮武器系统软件的测试效率和有效性提供了借鉴方法.实践表明,此方法对提高火炮武器系统软件的质量及可靠性具有实际的应用价值.
【总页数】4页(P28-31)
【作者】周云卿;李锋;顾涛;马斌
【作者单位】西北机电工程研究所,陕西,咸阳,712099;西北机电工程研究所,陕西,咸阳,712099;西北机电工程研究所,陕西,咸阳,712099;西北机电工程研究所,陕西,咸阳,712099
【正文语种】中文
【中图分类】TJ306
【相关文献】
1.基于AHP和云理论的自行火炮武器系统作战效能评估 [J], 周瑾粼;高启航
2.武器系统软件测试的研究与实践 [J], 陈万创
3.大数据背景下某型火炮武器系统作战指挥平台构建的实践与思考 [J], 张新华;邵海霞;王鄂;
4.某新型火炮武器系统作战运用数据库的设计与实现∗ [J], 纪伟虎; 段疆宏; 孙兴飞; 葛希波; 康少举
5.智能火炮武器系统研究综述 [J], 杨维;赵凯;耿修堂;王越;刘学超
因版权原因,仅展示原文概要,查看原文内容请购买。
某火箭炮伺服控制系统设计及控制算法研究的开题报告
某火箭炮伺服控制系统设计及控制算法研究的开题报告一、研究背景及意义火箭炮是一种重要的作战装备,其实际作战效果受到火箭炮控制系统的影响。
伺服控制系统是火箭炮控制系统中的重要组成部分,其作用是实现火箭炮瞄准和发射控制。
伺服控制系统包括电机、传感器以及控制算法等多个方面,其设计和控制算法的研究对保障火箭炮的作战效果具有重要意义。
目前,国内外对火箭炮伺服控制系统设计和控制算法的研究相对成熟,但是针对不同的火箭炮型号和不同的使用环境,仍然需要进一步优化控制算法和设计伺服控制器。
因此,本研究旨在针对某一特定型号的火箭炮,设计伺服控制系统,并研究适合该火箭炮的控制算法,以提高火箭炮的瞄准精度和射击效果,具有现实的应用价值。
二、研究内容及方法1. 火箭炮伺服控制系统设计:对某一特定型号的火箭炮进行分析,设计合适的伺服控制系统,包括电机、传感器等硬件选型和电路设计等方面。
2. 火箭炮控制算法研究:针对该型号火箭炮的控制需求,研究适合该火箭炮的控制算法,包括 PID 控制算法、精确定位算法等方面。
3. 系统模拟与实验验证:通过 MATLAB/Simulink 软件进行伺服控制系统的模拟,并进行实验验证,验证系统设计和控制算法的准确性和有效性。
三、论文结构本文将分为五个章节,具体结构如下:第一章:绪论。
介绍研究背景和意义,阐述研究内容和方法,概述论文结构。
第二章:火箭炮伺服控制系统设计。
对火箭炮进行分析,选取合适的伺服控制系统组件并进行电路设计。
第三章:火箭炮控制算法设计。
针对该型号火箭炮的控制需求,研究适合该火箭炮的控制算法,并进行模拟分析。
第四章:系统模拟与实验验证。
通过 MATLAB/Simulink 软件进行伺服控制系统的模拟,并进行实验验证。
第五章:结论与展望。
总结研究成果,阐述本研究的创新点和不足之处,并对未来的研究进行展望。
四、预期成果通过本研究,预计实现以下成果:1. 设计出适合该型号火箭炮的伺服控制系统,并进行电路设计。
现代火炮系统测试技术

1.火炮系统式样内容:火炮系统定型试验,一般分为基地定型试验(主要为技术试验和环境试验)和部队使用试验(寒区部队使用试验和热区部队使用试验)两个阶段进行。
2.火炮系统射击参数测试任务及内容:任务就是选用或研制合适的传感器,配用满足要求的放大器和记录仪器,通过对火炮系统设计现象的测试,给出完整精确的参数数据和曲线。
内容:1)内弹道参数测试2)反后坐装置参数测试3)结构参数测试3.直接测量:被测量直接与标准量进行比较,或者用预先标定好的测量仪器或测量设备进行测量,不需要对所获取数值进行运算而直接得到被测量值大小的方法。
例如,用直尺测量长度,用水银温度计测温,用万用表测电压电流电阻值等。
4.间接测量:被测量的数值不能直接由测量设备获得,而是通过直接测量其他物理量,而后根据一定的函数关系计算出被测物理量大小的测量方法。
例如,弹丸飞行速度的测量,通常是测量弹丸飞行过某段距离x的时间t,利用公式v=x/t计算出弹丸飞行过x距离的平均速度v的大小。
5.火炮系统的特点:高温高压高速瞬时性6.火炮系统测试的特点:1)测试工作条件差2)瞬时动态测试3)要求同步测试1 .火炮测试就是测量火炮在使用过程中各物理量和参数的变化情况。
通常利用测量装置或仪器,把变化的物理量转换成相应的信号,使之便于测量、分析和处理。
2.信号分类:1)有用信号和无用信号2)连续信号和离散信号3)确定性信号和随机信号3.信号分析就是采用各种物理或数学的方法从信号中提取有用信息的过程。
4.一般非电量测试系统组成:被测对象、试验装置、传感器、中间变换电路、信号分析仪器、显示记录仪器和标定装置等。
5.测试系统的特性在被测物理量不变或变化极慢的情况下,可以定义一组与运动微分方程无关的参数来描述测试系统的特性,这组参数称为静态参数。
静态参数表征测试系统的静态特性。
在被测物理量快速变化的情况下,就必须用测试系统的运动微分方程来描述其输入与输出间的动态关系,基于这种动态关系上的特性参数,称为动态参数。
基于PLC的火炮性能测试调平系统设计
基于PL C 的火炮性能测试调平系统设计刘克福1,李晓虹2( 1.西华大学机械工程与自动化学院,成都610039;2.西华大学能源与环境学院,成都610039)火炮出厂前进行性能测试时,要求能够模拟野外作业时的各种位置状态和工况。
以往的火炮性能测试实验台,多采用固定水泥基座,设备的工作精度和稳定性虽然得到保证,但不能对火炮在野外作业时的各种位置状态和俯仰角度进行模拟。
为此,设计了一种基于PLC 自动控制的液压调平平台。
该实验台能快速精确调平,并按照设定要求进行X 、Y 方向的倾斜,倾斜角度范围、误差范围<0.05°,用于火炮出厂前各种工况的性能测试。
1支撑方案设计1.1支撑点数分析与确定目前,调平系统支撑方式主要有三点支撑、四点支撑和六点支撑三种情况[1,2]。
三点支撑较易实施,调平相对容易,缺点是抗倾覆能力差,调平后的水平误差较大。
若三点式平台的倾角传感器按等边三角形布置,即两传感器的夹角为60°,沿两传感器的X 方向和Y 方向的控制精度都为±!,则水平误差为"=2![3,4]。
六点调平支撑可靠,抗倾覆能力强,但存在静不定问题,容易产生“虚腿”。
静不定次数越高,系统越复杂。
六条腿支撑一个平台,按照三点决定一个平面的原则,支撑腿可构成20个稳定平面。
当平台水平度不满足要求时,理论上存在20种调平策略可使平台调平。
多组调平策略的选择给整个控制系统带来了巨大的计算负担,在一定程度上影响了控制的实时性。
结合系统应用的实际情况,综合考虑到平台稳定性、调平精度、系统成本等因素,本实验平台采用液压缸四点支撑调平法,两传感器夹角为90°,水平误差为"=2!![3,4],较三点支撑小。
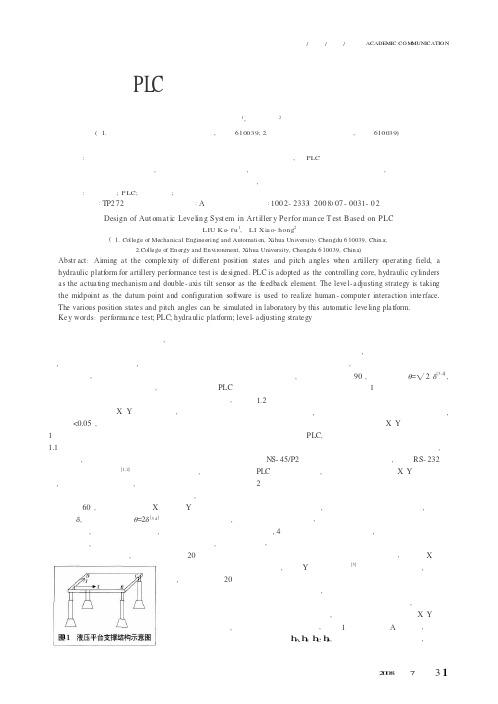
其支撑结构如图1所示。
1.2倾角传感器的布置在本设计中,倾角传感器作为系统的重要组成部分,有着举足轻重的地位。
它将液压平台X 、Y 方向的倾斜角度α、β反馈给PLC ,因此倾角传感器的好坏和布置方式直接影响到系统的调平时间和调平精度。
兵器系统测试技术研究及应用探索

兵器系统测试技术研究及应用探索随着人类科技的不断进步,各种先进的兵器装备也越发的成熟和完善,这不仅得益于海量的研发投入,更多地依赖于精准的系统测试技术。
兵器系统测试技术是指对兵器系统进行全面、细致、科学和规范的测试,为提高兵器系统的性能、可靠性、安全性和质量提供必要的技术手段。
本文将探究兵器系统测试技术研究及应用探索。
一、兵器系统测试技术的基本理论1.测试工程学理论测试工程学是了解和掌握兵器测试过程、测试方法、测试管理等整个测试工作的学科,主要包括测试系统分析、测试计划和建模、测试指标和分析方法等方面。
它可以为兵器系统的测试规划、测试设计、数据处理和测试评价提供理论和方法指导。
2.测试设备理论测试设备理论提供了测试设计的基本思路和测量工具的理论。
测试设备是一种测量和计算工具,它根据已有的测试计划,为测试人员提供可靠、准确、快速的数据采集和分析。
3.测试方法与技术理论测试方法与技术理论包括测试评价指标之间的相互关系、测试过程控制的方法,以及常见故障诊断测试技术等。
测试方法和技术是测试技术的突破口,这也是测试工作中最具挑战性和技术含量的部分。
二、兵器系统测试技术的应用探索1.测试电子学器件的应用兵器系统中有很多情况需要电子学工程师测量和分析。
电子学器件能够测量和分析电路的频率响应、时钟精度、电压稳定性等特征。
通过检测这些特征的值,可以得出电路的性能水平,并评估整套系统的可靠性和安全性。
同时,受制于现代化战争环境的要求,许多电子设备需要在极端低温或极端高温的条件下工作,所以这些测试偏好在复杂的环境下完成。
2.热力学测试的应用兵器系统在车内发动机、发电机和其他机械设备中常会产生大量的热量。
在此环境下测试制冷设备的性能,可以有效地节省整个兵器系统的能源和维护成本,提高兵器的可靠性和战斗力。
同时,在对燃料供应、油箱加热器、燃烧室等配件进行测试的过程中,对于兵器系统的稳定和性能的感知度也将增强。
3.声学测试的应用兵器的各种战斗机构、武器和车辆在运转时会产生不同的噪音污染,而噪音是兵器的另一维度性能指标。
浅析炮控系统性能参数测试方案

浅析炮控系统性能参数测试方案【摘要】随着高新技术在坦克武器系统研发中的广泛应用,现行的测试手段已无法满足新型坦克武器系统鉴定试验的要求。
因此,迫切需要开展相应的武器系统总体试验技术的研究,通过研制高精度的坦克炮控性能测试系统,来满足试验鉴定的需要。
【关键词】炮控系统;测试参数;光纤陀螺鉴于目前落后的人工测试手段,为了提高测试精度,缩短实验周期,兼顾节约实验经费,依据炮控系统测试技术特点,可选择的测试方案有以下4种:(1)CCD+点光源;(2)激光器+PSD光学测量靶;(3)光纤陀螺;(4)电测法。
D+点光源将点光源和标尺安装在炮筒的前端,与CCD(Charge Coupled Device)正对的方向;由点光源在CCD中成像,以此来识别炮筒的位移;同时在点光源平面处设立标尺,来对CCD进行标定[1]。
其原理如图1所示,在这种方案下,点光源所成像的位移实际就是炮筒的位移。
影响测量精度在于两个主要的方面,一是CCD的单位像素,一是点光源与CCD之间的距离变化带来的非线性误差。
图1 CCD+点光源测试原理图2.激光器+PSD光学测量靶PSD(Position Sensitive Detector)是一种半导体位置敏感器件,其工作原理是基于横向光电效应,又称侧向光生伏特效应或殿巴(Dember)效应[2]。
将激光器固定在炮管上,发射激光照射到位于炮口正前方的测量靶上。
该激光光点经过光学系统成像于高精度PSD上,PSD输出的信号经过炮控系统测试前端机处理后,经CAN总线传送到计算机中,计算机计算出光点的位置,入射光点的位置及数据可以在显示器上实时显示。
火炮身管运动时,激光光点的运动轨迹就显示在计算机屏幕上,根据相应的公式便可计算出炮控系统的静态参数。
其原理如图2所示。
图2 激光器+PSD测试系统原理图3.光纤陀螺光纤陀螺FOG(Fiber Optic Gyroscope),是利用光纤构成的萨格奈克(Sagnac)干涉仪[3],是一种纯光学、全固态陀螺仪。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
・ 28 ຫໍສະໝຸດ ・J OURNAL OF GUN LAUNCH & CONTROL
21 0 0年 1 2月
某 火 炮 武 器 系统 电气 控 制 软 件 测试 实践
周云卿 ,李 锋 ,顾 涛 ,马 斌
( 北 机 电 工 程 研 究 所 , 陕 西 成 阳 7 2 9 ) 西 1 0 9
关键 词 : 算 机 应 用 ;火炮 ,嵌 入 式 软 件 测 试 ;静 态 分 析 计
中 图分 类 号 : J 0 T 36 文 献 标 志 码 :A 文 章 编 号 :1 7 — 5 4 ( 0 0 40 2 —4 6 36 2 2 1 )0 —0 8 0
Te tPr c i e o e t i nt o o t r f A r a n Gu e p n S s e s a tc fEl c r c Co r lS f wa e o Ce t i n W a o y t m
式 ,以 某火 炮 电气 控 制 软 件 为测 试 实 例 ,对 其 进 行 了静 态 分 析 、文 档 审 查 与 动 态 测 试 。为 提 高 火 炮 武 器 系 统 软 件 的 测试 效 率 和有 效 性 提 供 了借 鉴 方 法 。实 践 表 明 ,此 方 法 对 提 高 火 炮 武 器 系 统 软 件 的 质 量 及 可 靠 性 具 有 实 际 的 应用 价值 。
ZH OU Yun q n — i g, LI Fe ng, GU o, M A n Ta Bi
( rh s n ttt fM eh nc l& E etia gn e ig , Xin a g 7 2 9 , S a n i,Chn ) No t wetI siueo c a ia lcr l c En ie rn a yn 10 9 ha x ia
摘 要 :针 对火 炮 武 器 系 统软 件 的特 点 ,利 用 Tete s d和 R Is h 搭 建 了 嵌 入 式 实 时 系 统 的 软件 测 试 平 b Tni t g 台 ,通 过将 T sbd软 件 测 试 工 具 的静 态 分 析 与代 码 插 装 技 术 和 R is h 实 时数 据 采 集 分 析 设 备 相 结 合 的方 ete T ni t g
t c ito n na y i t k ng t l c rcc t o o t a eofa c ra n g y t m sa c ua e te — a a qu s i n a d a l ss, a i hee e t i on r ls fw r e t i un s s e a n a t lt s x
Ke r s c mp t ra p ia i n g n;e e d d s fwa e t s ;sa i n l ss y wo d : o u e p l t ; u c o mb d e o t r e t t tc a a y i
随着 武器装 备技 术 的不 断 更 新 和发 展 , 嵌入 式 系统 已应 用 到 武 器 装 备 的各 个 层 面 。嵌 入 式 软 件 作 为嵌入 式应 用 的核心 , 武 器 系统 提供 了各 种控 为 制、 计算 与 管理 功 能 , 复 杂度 越来 越 高 、 其 规模 越来
a l , i t tc a a y i ,d c me te a i a i n a d d n mi e twe ec r id o t Th e u t fs u y mp e t s a i n l ss o u n x m n t n y a ct s r a re u . s o ers l o t d s
Ab t a t Ai d a h e t r s o u a o y t m o t r , a k n f e tp a f r o m b d e e sr c : me t t e f a u e fg n we p n s s e s fwa e i d o s l to m fe e d d r - t
c n pr v de r f r n e m e ho o m p ov n e te fce y a a i iy ofgu a n s t m o t r . a o i e e e c t d f r i r i g t s fi inc nd v ld t n we po ys e s f wa e Th a tc h we h tt sm e ho s a t a p ia in v l e f m p o ng q lt nd r l bi t f e pr c ie s o d t a hi t d ha c u la plc to a u ori r vi ua iy a e i l y o a i gu a n s s e s fwa e n we po y t m o t r .
a- i y t m ofwa e wa c ns r t d by u e o s b d a ltme s s e s t r s o t uc e s f Te t e nd RTI s g . Co b ne t tc a a y i f n i ht m i d s a i n l s s o Te t e o t r e tt olwih c d l g i un i g t c no o e nd d v c so s b d s f wa e t s o t o e p u —n mo tn e h l gis a e ie fRTI sghtr a -i a n i e ltme d -