工程光学实验光线的光路计算
第六章 光线的光路计算
当U角较小时, 为提高计算精度, 可作如下变换 :
L' L n'cosU ' n cosU
近轴区光线的光路计算公式类似地有 :
i u
i' ni / n' nu / n'
u' i'
l' lu / u' ln' / n
(6-8)
《工程光学》 第六章
二、沿轴外点主光线细光束的光路计算
y'a y'z
(L'a (L'z
l' l'
)tgU )tgU
'a 'z
y'b (L'b l')tgU 'b
(6-6)
虽然应用了校对公式, 但要注意以下两点 :
1.由sin I计算sin I '时,由于校对公式中没有包含折射率因子,
所以任何错误都不会影响校对结果;
2.由L'k1 计算Lk时,也不是校对公式所能检验的. 此外需注意,以下两种情况都表示该光线实际上已不能通过 系统 : 3.有时在个别面上会出现sin I 1,这是因为入射光线入射点 高度超过了折射面半径;
U1的幂级数表示球差随它们的变化规律:
L' A1h12 A2h14 A3h16
或L' a1U12 a2U14 a3U16
(6-15)
式中第一项为初级球差,第二项为二级球差, 第三项为三级球差。
当孔径较小时,主要存在初级球差;孔径较大 时,高级球差增大。
《工程光学》 第六章
二、球差的较正
轴外点细光束的计算是沿主光线进行的,主要研究在 子午面内的子午细光束和在弧矢面内的弧矢细光束 的成像情况。若子午光束和弧矢光束的像点不位于 主光线上同一点,则存在像散。
工程光学第6章光线的光路计算及像差理论
1:概述:2:单色像差:由于光线系统的成像均具有一定的孔径和视场,对不同孔径的入射光线其成 像的位置不同,不同的视场的入射光线其成像的倍率也不同,子午面和弧失 面光束成像的性质也不同。
故单色光成像会产生性质不同的5种像差。
色差:白光进入光学系统后,由于折射率不同而有不同的光程,导致了不同色光成像 的大小和位置也不相同,这种不同色光的成像差异称为色差。
波像差:由于衍射现象的存在,经过光学系统形成的波面已不是球面,实际波与理想波 的偏差称为~~,简称波差。
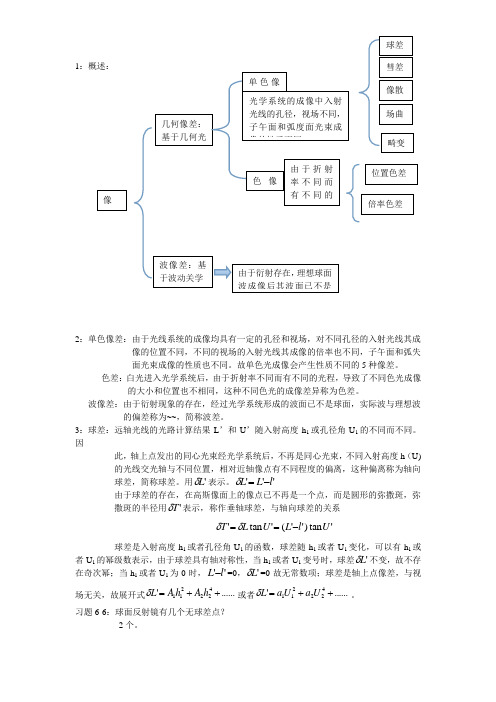
3:球差:远轴光线的光路计算结果L ’和U ’随入射高度h 1或孔径角U 1的不同而不同。
因此,轴上点发出的同心光束经光学系统后,不再是同心光束,不同入射高度h (U) 的光线交光轴与不同位置,相对近轴像点有不同程度的偏离,这种偏离称为轴向 球差,简称球差。
用'L δ表示。
'''l L L -=δ由于球差的存在,在高斯像面上的像点已不再是一个点,而是圆形的弥撒斑,弥 撒斑的半径用'T δ表示,称作垂轴球差,与轴向球差的关系'tan )''('tan 'U l L U L T -==δδ球差是入射高度h 1或者孔径角U 1的函数,球差随h 1或者U 1变化,可以有h 1或者U 1的幂级数表示,由于球差具有轴对称性,当h 1或者U 1变号时,球差'L δ不变,故不存在奇次幂;当h 1或者U 1为0时,''l L -=0,'L δ=0故无常数项;球差是轴上点像差,与视场无关,故展开式......'422211++=h A h A L δ或者......'422211++=U a U a L δ。
习题6-6:球面反射镜有几个无球差点?2个。
像几何像差:基于几何光波像差:基于波动关学 由于衍射存在,理想球面波成像后其波面已不是单色像色像由于折射率不同而有不同的光学系统的成像中入射光线的孔径,视场不同,子午面和弧度面光束成像的性质不同 球差彗差 像散 场曲 畸变 位置色差 倍率色差。
第6章光线的光路计算及像差理论.
细光束弧矢场曲:前后细光束交点离理想像平面 的距离。
畸变:主光线和理想像面交点与理想点的 垂轴距离;
轴外像差小结
宽 宽与上细上细光 光细下前光下畸光束束光光后束、轴前变束子弧束线光子前外 后:弧午 矢(的线上午后点 光主矢场 场交的下场光也 线光场曲 曲点交光曲线有 交线曲: :偏点线:交球点和的:上前离偏)上点像差(的理垂前下后主离像下的的点,想距轴后光光光主点细距沿沿宽像离距细线线线光)光离轴与轴光面;离光交交(线束垂。距细距束交;束点点(交轴垂离光离(点交离离上点距轴:束—与点理理下离离距宽(—前理离想想细光理)离光子:后想理像 像光线想)束午子:光像想平 平束)像像交轴午弧线点像面 面像平散点外彗矢)平的 的散像面(球差彗像面距 距X点x差差点离 离;的.。); 。 就是弧矢轴外球差。
物空间 n
法线
E
I
折射球面
像空间 n´
入射光线
B
物
-U
I
h
折射光线
U
A
A
光轴 O
C
像
r
B
-L
L´
第四节 轴外像差 预备知识
了解成像光束光线的全貌,需要看光束在两 个平面——子午平面和弧矢平面上的分布情况。 子午平面:由轴外物点和光轴所确定的平面。 弧矢平面:过主光线且与子午平面垂直的平面。
子午光线 弧矢光线
sinU
可以证明,齐明点满足正弦条件。
等晕条件
实际由于球差存在,只能要求近轴轴外点具有和轴 上点相同的成像缺陷。此时称等晕成像,需要满足 的条件就比正弦条件降低了,称等晕条件。
前后光线的交点偏离主光线(垂轴距离):弧矢彗差
轴外点也有球差,宽光束(上下光线)交点(像点) 与细光束(上下光线)像点沿轴距离——子午轴外球差。
第八章 光线光路计算

n n i u ; i ' i u n' n' u ' i ' ; l ' l u l n ' u' n
1 l d 1 n u i 2 u i li 2 li l d i d i 1
d 2 , , Lk Lk 1 d k 1 L2 L1 d1 , L3 L2 , , U k U k 1 U 2 U 1 , U 3 U 2 , n3 n 2 , , n k n k 1 n2 n1
2. 物体位于有限距离
1)轴上点:L,U 2)轴外点: 各条光线和高斯面交点的高度为:
y 上光线:tgU a L L , La Lz tgU z z 主光线:U z , L z y 下光线: tgU , L L b b z L L tgU z z
二、光线光路计算过程
1. 给出或求出每个折射面的光学参数: l,l′,u,u′, L,sinU,L′, sinU′等 2. 由像差计算公式,计算各个折射面的像差贡献,了解整个光学系 统的像差。(像差公式与光学参数有关) 3. 轴上点及轴外点成像采用相同计算公式(近轴光或远轴光) 轴上点:物点位置l和孔径角u 初始坐标 轴外点:入瞳位置lZ和 视场角uZ
l tgU a Ya La l tgU z Yz L z Y L l tgU b b b
四、光线经过平面时的光路计算
1. 远轴光计算公式:
n I U ; sin I ' sin I n' U ' I ' ; L' L tg U tgU
电子教材-光线的光路计算

工程光学 Engineering Optics
第六章 第二节 光线的光路计算
四、子午面内光线的特殊情况
1.折射平面
I = −U ⎧ ⎪ sin I ' = n sin I / n' 远轴光线 ⎪ ⎨ U ' = −I ' ⎪ ⎪ L' = L tan U / tan U ' ⎩
i = −u ⎧ ⎪ i' = n ⋅ i / n' ⎪ 近轴光线 ⎨ u' = −i' ⎪ ⎪l ' = l ⋅ u / u' = l ⋅ n' / n ⎩
工程光学 Engineering Optics
第六章 第二节 光线的光路计算
第一章回顾 单个折射球面光路计算
BUPT Automation School
北京邮电大学 自动化学院
宋 晴
工程光学 Engineering Optics
第六章 第二节 光线的光路计算
二、子午面内近轴光线的光路计算
1.轴上点近轴光线(细光束)——“第一近轴光线”
解:按照“轴上点远轴光线”公式: 由 (La, Ua) (La’, Ua’) 由 (Lz, Uz) (Lz’, Uz’) 由 (Lb, Ub) (Lb’, Ub’) 由 L L’ 像高: 上光线 ya ' = ( La '− L' ) tan U a ' 主光线 y z ' = ( La '− L' ) tan U z ' 下光线 yb ' = ( Lb '− L' ) tan U b ' 实际像高 BUPT Automation School 北京邮电大学 自动化学院 宋 晴
工程光学第六章光线的光路计算及像差理论

工程光学第六章光线的光路计算及像差理论光线的光路计算及像差理论是工程光学中非常重要的主题。
在实际的光学工程设计中,准确地计算光线的光路和考虑像差对于正确预测和优化光学系统的性能至关重要。
本文将详细介绍光线的光路计算方法和像差理论。
光线的光路计算是指在给定光学系统的参数和输入光线的条件下,确定光线在系统中的传播路径。
光线的传播路径可以通过几何光学的基本定律来计算,如光线的折射、反射和偏折等。
在确定光线的传播路径时,需要考虑光线的入射角、光线的折射率、光学元件的形状和位置等因素。
光线的光路计算可以采用追迹方法或者矢量法进行,具体方法取决于所研究问题的复杂性和准确性要求。
在光线的光路计算过程中,通常需要考虑光线的反射和折射,这需要利用光学元件的表面曲率和入射光线的入射角来计算。
对于球面曲率的光学元件,可以使用球心距离和球心方向来确定入射光线的出射角度。
对于非球面曲率的光学元件,可以通过数值方法来求解光线的光路。
像差是指光线传播过程中光学系统造成的光线聚焦不完美的现象。
像差的存在会导致图像的模糊、畸变和色差等问题。
像差的产生主要源于光学元件的形状和折射性质的不完美。
像差理论可以通过将光线的传播过程分解为一系列的近似操作来描述和计算。
常见的像差包括球差、色差、像散和畸变等。
球差是指在球面镜或球面透镜上,由于光线入射角的不同,导致光线的聚焦位置不一致的现象。
球差的计算可以通过利用轴上点和非轴上点的光线角度来求解。
色差是指由于光的折射性质的不同,导致不同波长的光聚焦位置不一致的现象。
色差的计算可以通过利用不同波长的光的折射率来求解。
像散是指由于光线的折射作用,导致光线聚焦位置随着入射光线离轴距离的变化而变化的现象。
像散的计算可以通过利用非轴上点的入射角度和位置来求解。
畸变是指由于光学元件形状的不对称性,导致图像的形状和位置发生变化的现象。
畸变的计算可以通过利用非球面曲率的光学元件的光路来求解。
总之,光线的光路计算和像差理论对于工程光学的实际应用具有重要意义。
第七章 光路计算及(实)

,
Ya
,
A,0
Yb
,
Yz
,
Bb , Ba
,
B,T
§7.4 彗差
一.彗差及计算 定义:在子午平面光束中,本来对主光 线对称的各对光线,经系统以后失去对 称的一种成像缺陷称为子午彗差。 现象:主要能量在像方主光线附近,形 成一个以主光线为顶点的彗星形能量分 布。
§7.4 彗差
度量:以轴外光束上、下光线在高斯像面 上交点高度的平均值和主光线在高斯像 面上交点高度之差表示:
※球差是轴上点唯一的单色像差。
§7.3 球差
◇单正透镜产生负球差,单负透镜产生 正球差,正、负透镜组合起来可能使球 差得到校正。 ◇所谓消球差系统一般只能使一个孔径 (带),通常使边缘孔径的球差为零。
§7.3 球差
二、光学系统的球差分布公式
§7.3 球差
对于光学系统中任一个折射面,球差是 由两部分组成的,一部分是该折射面本 身所产生的球差,另一部分是折射面物 方球差乘以该面的转面倍率而得到的。 可用下式表示折射面的像方球差:
§7.2 轴外物点近主光线细光束经球面折射的计算
入瞳 P
I -s
M1 M M2
I
,
t
,
Bt,
d
A dU U B MB=-t MB=-s
-t
B,s1
Bs
,
B,s2
C B,s M,s M MB,t=t, , , MB s=s M,,s B, t
B
§7.2 轴外物点近主光线细光束经球面折射的计算
§7.3 球差
一、球差的定义及计算
光学系统 高斯像面
-U
U
L,
,
A0, A,
(工程光学教学课件)第6章 光线的光路计算及像差理论
无像质要求系统:
(1)
有像质要求的一般系统:
(1)、(2)
有像质要求的大视场系统: (1)、(2)、(3)
有像质要求的大视场、大孔径系统:(1)、(2)、(3)、(4)
光线光路的计算主要有三类:
✓子午面内的光线光路计算 ✓沿轴外点主光线的细光束像点的计算 ✓子午面外光线或空间光线的计算
子午面内的光线光路计算
L' )tgU L' )tgU
' a
' z
Yb'
( L'b
L' )tgU
' b
B’b B’z
B’a
Y’b
Y’z Y’a
-U’a
P’ -U’z -U’b
O
A’o
--L’a
--L’b
--L’z --L’
3.折射平面和反射平面的光路计算
远轴光按大L公式进行计算:
sin I L r sin U r
补充:五、光学设计的一般过程和内容 (了解)
(1) 成像要求:基本类型,视场,观测方式,景深,渐晕, 分辨率,仪器尺寸,其它要求等;
(2) 建立理想 基本光组数量,焦距,成像光路,物像共轭距、 系统模型:物像四要素,反射棱镜(用平行平板表示)等;
(3) 构造基本 按最低数量配置透镜,初步确定透镜的材料、 光学系统:形状、孔径、曲率半径等参数,配置必要光阑, 确定反射棱镜的形状和大小,其它器件等;
(4) 光线计算 以理想成像为标准,用光线理论进行实际光线 求 像 差:的光路计算,以确定各类像差;
(5) 像质评价:按照系统像质要求,确定主要和次要像差, 并进行像差评价和分析,研究改善方案;
修正设计:通过对系统各类参数的调整和增加透镜,重复 前面(3)、(4)步骤,逐渐校正像差,最终达到 系统的像质要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验名称:实验一 光线的光路计算一、实验目的:1、对光线光路计算的目的和方法有初步的了解;2、对子午面内的光线光路计算进行训练以加深理解;3、对像质危害和像差产生的原因获得较为感性的认识。
二、实验原理:(一)、球差的定义1、轴向球差: 轴上点发出的同心光束经光学系统后,不再是同心光束,不同入射高度的光线交光轴于不同的位置,相对近轴像点有不同程度的偏离,这种偏离称为轴向球差,简称球差。
2、垂轴像差: 由于球差的存在,在高斯像面上的像点已不是一个点,而是一个圆形的弥散斑,弥散斑的半径称为垂轴球差。
3、球差的性质:⑴球差是入射高度的函数;⑵球差具有对称性;⑶球差与视场无关。
4、单正透镜产生负球差,单负透镜产生正球差;单透镜无法校正球差。
正负透镜组合才有可能校正球差。
5、对于仅含初级球差、二级球差的光学系统,当边缘带的球差为0时,在0.707带有最大的剩余球差。
6、单个折射球面的不晕点(齐明点):不产生像差的共轭点。
(1)L =0,即L ’=0,β=1。
即物点和像点均位于球面顶点。
(2) ,即I =I ’=0。
表示物点和像点均位于球面的曲率中心。
或L=L ’=r ,则β=n/n ’。
(3),β=(n/n ’)2。
(二)、球差的计算1、子午面内的光线光路计算:(1)、近轴光线光路计算:求出理想像的位置和大小,轴上点近轴光线光路计算:求出理想像的位置, 计算公式:u r r l i -= (11111r h i 0u l ==∞=,时,当)··············(1) u n n i ''=·..........................................(2) ''i i u u -+= (3)0I I ='-sin sin)''('u i 1r l +=·············································(4) 过渡公式:i i 1i d l l -=+' (5)'i 1i u u =+ (6)'!i i n n =+ (7)2、远轴光线光路计算轴上点远轴光线光路计算:求出实际像点的位置。
计算公式)/sin()(i u r L I sin -= (当11111r h sinI 0U L /==∞=,时,)······(8) '/sin 'sin n I n I =······················································(9) ''I I U U -+=························································(10) 'sin /'sin 'U I r r L +=···················································(11) 转面公式:i i 1i d L L -=+'........................................................(12) 'i 1i U U =+........................................................(13) 'i 1i n n =+.. (14)三、实验内容:对如下的双胶合透镜计算球差,并画出球差曲线。
所用到的程序:n=1.000;nD1=1.51633;nD3=1.6727;nF1=1.52196;nF3=1.68746;nC1=1.51389;nC3=1.66662;r1=62.5;r2=-43.65;r3=-124.35;d1=4.0;d2=2.5;hm=10;h1=linspace(0.01,hm,10000); %h1=0:0.01:10;U1=0;u1=0;%D光近轴i1=h1./r1;i11=n.*i1./nD1; % D光近轴在第一镜面成像参数u11=u1+i1-i11;l11=(i11.*r1)./u11+r1l2=l11-d1;i2=(l2-r2).*u11./r2;i21=nD1.*i2./nD3; % D光近轴在第二镜面成像参数u21=u11+i2-i21;l21=r2+r2.*i21./u21l3=l21-d2;i3=(l3-r3).*u21./r3;i31=nD3.*i3./n; % D光近轴在第三镜面成像参数u31=u21+i3-i31;l31=r3+r3.*i31./u31%D光远轴%计算初值为L1=inf,U1=0,sinI1=h1/r1;I1=asin(h1./r1);I11=asin(n.*sin(I1)./nD1) % D光远轴在第一镜面成像参数U11=0+I1-I11;L11=r1+(r1.*sin(I11)./sin(U11));L2=L11-d1;U2=U11;I2=asin((L2-r2).*sin(U2)./r2);I21=asin(nD1.*sin(I2)./nD3); % D光远轴在第二镜面成像参数U21=U2+I2-I21;L21=r2+(r2.*sin(I21)./sin(U21));L3=L21-d2;U3=U21;I3=asin((L3-r3).*sin(U3)./r3); % D光远轴在第三镜面成像参数I31=asin(nD3.*sin(I3)./n);U31=U3+I3-I31;L31=r3+(r3.*sin(I31)./sin(U31));QC=l31-L31plot(QC,h1/hm,'g') %理想值减实际值得球差title('D光F光C光球差曲线')hold on%F光近轴i1=h1./r1;i11=n.*i1./nF1; % F光近轴在第一镜面成像参数u11=u1+i1-i11;l11=((i11.*r1)./u11)+r1l2=l11-d1;i2=(l2-r2).*u11./r2;i21=nF1.*i2./nF3; % F光近轴在第二镜面成像参数u21=u11+i2-i21;l21=r2+r2.*i21./u21l3=l21-d2;i3=(l3-r3).*u21./r3; % F光近轴在第三镜面成像参数i31=nF3.*i3./n;u31=u21+i3-i31;l31=r3+r3.*i31./u31%F光远轴%计算初值为L1=inf,U1=0,sinI1=h1/r1;I1=asin(h1./r1);I11=asin(n.*sin(I1)./nF1) % F光远轴在第一镜面成像参数U11=U1+I1-I11;L11=r1+(r1.*sin(I11)./sin(U11));L2=L11-d1;U2=U11;I2=asin((L2-r2).*sin(U2)./r2); % F光远轴在第二镜面成像参数I21=asin(nF1.*sin(I2)./nF3);U21=U2+I2-I21;L21=r2+(r2.*sin(I21))./sin(U21);L3=L21-d2;U3=U21;I3=asin((L3-r3).*sin(U3)./r3); % F光远轴在第三镜面成像参数I31=asin(nF3.*sin(I3)./n);U31=U3+I3-I31;L31=r3+(r3.*sin(I31)./sin(U31));QC=l31-L31 %理想值减实际值得球差plot(QC,h1/hm,'c')hold onplot(0,[0:0.01:hm]/hm,'k')%C光近轴i1=h1./r1;i11=n.*i1./nC1; % C光近轴在第一镜面成像参数u11=u1+i1-i11;l11=((i11.*r1)./u11)+r1;l2=l11-d1;i2=(l2-r2).*u11./r2;i21=nC1.*i2./nC3; % C光近轴在第二镜面成像参数u21=u11+i2-i21;l21=r2+(r2.*i21./u21);l3=l21-d2;i3=(l3-r3).*u21./r3;i31=nC3.*i3./n;u31=u21+i3-i31; % C光近轴在第三镜面成像参数l31=r3+(r3.*i31./u31);%C光远轴%计算初值为L1=inf,U1=0,sinI1=h1/r1;I1=asin(h1./r1);I11=asin(n.*sin(I1)./nC1) % C光远轴在第一镜面成像参数U11=U1+I1-I11;L11=r1+(r1.*sin(I11)./sin(U11));L2=L11-d1;U2=U11;I2=asin((L2-r2).*sin(U2)./r2); % C光远轴在第二镜面成像参数I21=asin(nC1.*sin(I2)./nC3);U21=U2+I2-I21;L21=r2+(r2.*sin(I21)./sin(U21));L3=L21-d2;U3=U21;I3=asin((L3-r3).*sin(U3)./r3);I31=asin(nC3.*sin(I3)./n); % C光远轴在第三镜面成像参数U31=U3+I3-I31;L31=r3+(r3.*sin(I31)./sin(U31));QC=l31-L31plot(QC,h1/hm,'b');hold onplot(0,[0:0.01:hm]/hm,'k')产生的图形:由图形可以看出D光的球差一直在增大,F和C光的球差是先增大后减小,由图还可以看出,D光的球差为负值,F和C光的球差为正值。