基于协方差矩阵表示的图像集匹配
opencv+c++用协方差函数匹配影像代码

opencv+c++用协方差函数匹配影像代码在OpenCV中,可以使用calcCovarMatrix函数来计算两个影像之间的协方差矩阵。
协方差矩阵是描述两个变量之间关系的一种统计量,可以用于影像匹配和特征匹配等应用。
下面是一个示例代码,展示了如何使用协方差函数来匹配影像:```c++#include <opencv2/opencv.hpp>using namespace cv;int main(){// 读取两张影像Mat image1 = imread('image1.jpg', IMREAD_GRAYSCALE);Mat image2 = imread('image2.jpg', IMREAD_GRAYSCALE);// 确保两张影像大小一致resize(image1, image1, image2.size());// 将影像转换为一维向量Mat image1_vector = image1.reshape(1, image1.rows * image1.cols);Mat image2_vector = image2.reshape(1, image2.rows * image2.cols);// 计算协方差矩阵Mat covar, mean;calcCovarMatrix(image1_vector, covar, mean,CV_COVAR_NORMAL | CV_COVAR_ROWS);// 将协方差矩阵归一化normalize(covar, covar, 0, 255, NORM_MINMAX, CV_8U);// 在第二张影像上绘制匹配结果Mat matched_image;matchTemplate(image2, covar, matched_image,TM_CCOEFF_NORMED);// 找到匹配结果的最大值和位置double min_val, max_val;Point min_loc, max_loc;minMaxLoc(matched_image, &min_val, &max_val, &min_loc,&max_loc);// 在第二张影像上绘制匹配结果的矩形框rectangle(image2, max_loc, Point(max_loc.x + covar.cols, max_loc.y + covar.rows), Scalar(255, 255, 255), 2);// 显示结果影像namedWindow('Matched Image', WINDOW_NORMAL);imshow('Matched Image', image2);waitKey(0);return 0;}```在上述代码中,首先我们读取了两张影像,并将它们转换为一维向量,然后使用calcCovarMatrix函数计算了第一张影像的协方差矩阵。
图像匹配+图像配准+图像校正
图像匹配图像匹配是指通过一定的匹配算法在两幅或多幅图像之间识别同名点,如二维图像匹配中通过比较目标区和搜索区中相同大小的窗口的相关系数,取搜索区中相关系数最大所对应的窗口中心点作为同名点。
其实质是在基元相似性的条件下,运用匹配准则的最佳搜索问题。
图像匹配主要可分为以灰度为基础的匹配和以特征为基础的匹配。
1、灰度匹配灰度匹配的基本思想:以统计的观点将图像看成是二维信号,采用统计相关的方法寻找信号间的相关匹配。
利用两个信号的相关函数,评价它们的相似性以确定同名点。
灰度匹配通过利用某种相似性度量,如相关函数、协方差函数、差平方和、差绝对值和等测度极值,判定两幅图像中的对应关系。
最经典的灰度匹配法是归一化的灰度匹配法,其基本原理是逐像素的把一个以一定大小的实时图像窗口的灰度矩阵,与参考图像的所有可能的窗口灰度阵列,按某种相似性度量方法进行搜索比较的匹配方法,从理论上说就是采用图像相关技术。
利用灰度信息匹配方法的主要缺陷是计算量太大,因为使用场合一般都有一定的速度要求,所以这些方法很少被使用。
现在已经提出了一些相关的快速算法,如幅度排序相关算法,FFT相关算法和分层搜索的序列判断算法等。
2、特征匹配特征匹配是指通过分别提取两个或多个图像的特征(点、线、面等特征),对特征进行参数描述,然后运用所描述的参数来进行匹配的一种算法。
基于特征的匹配所处理的图像一般包含的特征有颜色特征、纹理特征、形状特征、空间位置特征等。
特征匹配首先对图像进行预处理来提取其高层次的特征,然后建立两幅图像之间特征的匹配对应关系,通常使用的特征基元有点特征、边缘特征和区域特征。
特征匹配需要用到许多诸如矩阵的运算、梯度的求解、还有傅立叶变换和泰勒展开等数学运算。
常用的特征提取与匹配方法有:统计方法、几何法、模型法、信号处理法、边界特征法、傅氏形状描述法、几何参数法、形状不变矩法等。
基于图象特征的匹配方法可以克服利用图象灰度信息进行匹配的缺点,由于图象的特征点比较象素点要少很多,大大减少了匹配过程的计算量;同时,特征点的匹配度量值对位置的变化比较敏感,可以大大提高匹配的精确程度;而且,特征点的提取过程可以减少噪声的影响,对灰度变化,图象形变以及遮挡等都有较好的适应能力。
协方差矩阵的数学理论和实际应用案例

协方差矩阵的数学理论和实际应用案例协方差矩阵是统计学中常用的一种矩阵,它可以描述随机变量之间的相关性。
在实际应用中,协方差矩阵广泛应用于金融领域、机器学习、图像处理等领域。
本文将从数学理论和实际应用两个方面来探讨协方差矩阵。
一、协方差矩阵的数学理论在介绍协方差矩阵之前,我们先介绍方差和协方差的概念。
方差是一个随机变量与其数学期望之差的平方的期望,即$Var(X)=E[(X-E[X])^2]$。
协方差是两个随机变量之间的关联程度,定义为$Cov(X,Y)=E[(X-E[X])(Y-E[Y])]$。
其中,$E[X]$表示该随机变量的均值。
协方差矩阵是一个$n \times n$的矩阵,其中第$i$行第$j$列的元素是$Cov(X_i,X_j)$,即第$i$个和第$j$个随机变量之间的协方差。
协方差矩阵的对角线上的元素是方差,即$Var(X_i)$。
协方差矩阵可以表示为$C=\begin{bmatrix} Cov(X_1,X_1) & Cov(X_1,X_2) & \cdots & Cov(X_1,X_n) \\ Cov(X_2,X_1) & Cov(X_2,X_2) & \cdots & Cov(X_2,X_n) \\ \vdots & \vdots & \ddots & \vdots \\ Cov(X_n,X_1) & Cov(X_n,X_2) & \cdots & Cov(X_n,X_n) \end{bmatrix}$。
协方差矩阵的性质包括:1. 协方差矩阵是对称矩阵,即$C_{ij}=C_{ji}$。
2. 协方差矩阵是半正定矩阵,即对于任意$n \times 1$的向量$x$,都有$x^TCx \ge 0$。
这个性质表明协方差矩阵的所有特征值都非负。
3. 当协方差矩阵是对角矩阵时,表示的是各个随机变量的方差,且各个变量之间没有关联性。
影像匹配的基本算法

mn
C(c, r)
( gi, j g ) ( gir, jc g)
i1 j1
gc,r
1 mn
m i 1
n
gir , jc
j 1
g
1 mn
m i 1
n
gi, j
j 1
C(c0, r0) > C(c, r)( cc0, rr0)
《摄影测量学》(下)第三 章
影像匹配的基本算法
武汉大学
遥感信息工程学院 摄影测量教研室
主要内容
基于像方的匹配算法 基于物方的匹配算法 影像匹配的精度
数字影像匹配基本算法
影像匹配实质上是在两幅(或多 幅)影像之间识别同名点
常见的五种基本匹配算法
同名点的确定是以匹配测度为基础
G( gij )
整像素相关的精度
影像相关是左影像为目标区与右影像 上搜索区内相对应的相同大小的一影像 相比较,求得相关系数,代表各窗口中 心像素的中央点处的匹配测度
半 个 像 素
误差服从内的均匀分布(为像素大小)
2 x
2
x
2
(
x
)dx
2
( x) {1 / ,
x
2
0
2 x 2
Cgg( p, q) {g(x p, y q) E[g(x p, y q)]}2dxdy
( x, y )D
若(p0, q0) > (p, q)( pp0, qq0), 则 p0, q0为搜索区影像相对于目标区影像的位移 参数。对于一维相关应有q 0。
Ys) c2(Z Zs) Ys) c3(Z Zs)
本文基于相关性分析来实现图像匹配.
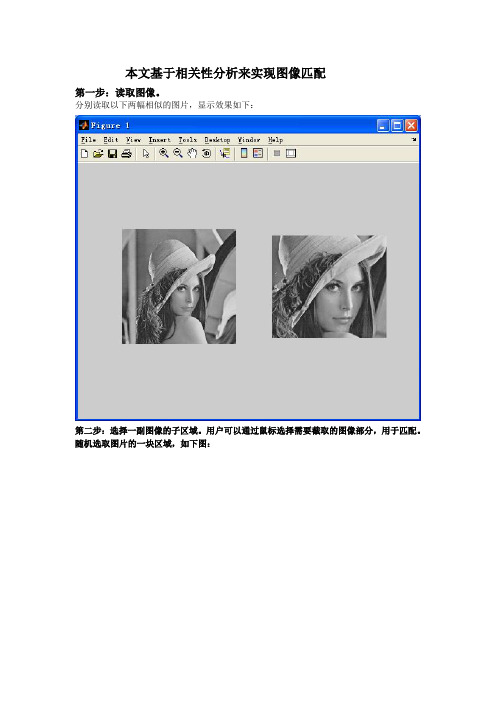
本文基于相关性分析来实现图像匹配第一步:读取图像。
分别读取以下两幅相似的图片,显示效果如下:第二步:选择一副图像的子区域。
用户可以通过鼠标选择需要截取的图像部分,用于匹配。
随机选取图片的一块区域,如下图:第三步:使用相关性分析两幅图像采用协方差的方式计算相关系数,分析图片的相似性。
1.协方差与相关系数的概念对于二维随机变量(,)X Y ,除了关心它的各个分量的数学期望和方差外,还需要知道这两个分量之间的相互关系,这种关系无法从各个分量的期望和方差来说明,这就需要引进描述这两个分量之间相互关系的数字特征——协方差及相关系数。
若X Y 与相互独立,则()()0Y E X EX Y EY σ--⎡⎤⎣⎦=≠;若()()0E X EX Y EY --≠⎡⎤⎣⎦,则表示X 与Y 不独立,X 与Y 之间存在着一定的关系设 (,)X Y 是二维随机变量, 则称()()E X EX Y EY --⎡⎤⎣⎦为X 与Y 的协方差(Covariance ),记为 ()cov ,X Y 或XY σ,即()()()cov ,XY X Y E X EX Y EY σ==--⎡⎤⎣⎦若0X σ=≠且0Y σ=≠,则称XY XY X Y σρσσ== 为X 与Y 的相关系数(Correlation Coefficient )。
()c o v ,X Y 是有量纲的量,而XY ρ则是无量纲的量.协方差常用下列公式计算()()=-⋅cov,X Y E XY EX EY2.用全搜索和协方差计算截取图片与另外一幅图片的各点的相似度。
c=normxcorr2(sub_I1(:,:,1),I2(:,:,1));第四步:找到整幅图像的偏移。
[max_c,imax]=max(abs(c(:)));[ypeak,xpeak]=ind2sub(size(c),imax(1));[m,n]=size(sub_I1);xbegin=xpeak-n+1;ybegin=ypeak-m+1;xend=xpeak;yend=ypeak;从原图像提取匹配到的图像extracted_I1=I2(ybegin:yend,xbegin:xend,:);第五步:显示匹配结果。
基于图像匹配的变压器套管工况识别方法研究

基于图像匹配的变压器套管工况识别方法研究李和阳;孙云莲;黄雅鑫;黎圣旻;余军伟【摘要】针对变压器套管工况识别难度大的实际,提出了基于图像匹配的变压器套管工况识别方法.首先,采用基于Guided滤波的Retinex图像增强算法对现场采集的变压器套管图像进行了预处理,然后采用基于改进的SIFT特征匹配算法对待测图像进行精确定位,利用基于最大熵阈值法(OET)图像分割方法提取了套管的边缘.最后,设计了识别器,进行了运行工况识别,给出了结果和分析,并将该方法应用于工程领域,体现了较高的实用价值.%In view of the difficulty in the identification of transformer bushing,a method of identification of transformer bushing condition based on image matching is proposed.Firstly,on the basis of Guided filter Retinex image enhancement algorithm is used to the acquisition of transformer bushing image preprocessing.Then,the improved SIFT feature matching algorithm is used to accurately locate the measured image.Based on the maximum entropythresholding(OET)method, the edge of casing is extracted.Finally,the recognition device is designed,and the operating condition identification is carried out.Results and analysis are given.And the method is applied to the engineering field,which reflects higher practical value.【期刊名称】《计算机工程与应用》【年(卷),期】2018(054)005【总页数】6页(P211-216)【关键词】图像匹配;变压器套管;尺度不变特征变换(SIFT);工况识别【作者】李和阳;孙云莲;黄雅鑫;黎圣旻;余军伟【作者单位】武汉大学电气工程学院,武汉430072;武汉大学电气工程学院,武汉430072;武汉大学电气工程学院,武汉430072;武汉大学电气工程学院,武汉430072;武汉大学电气工程学院,武汉430072【正文语种】中文【中图分类】TP317.41 引言变压器套管是变压器的重要组成部分,它起着绝缘、紧固和支撑引线的作用,由于其在运行中长期受到高温、电磁、侵蚀、机械等环境因素的影响,复合材料质地将逐渐老化,严重时会出现伞裙裂痕或破损,从而失去其基本效能,造成变压器故障,威胁着电力系统的安全运行。
基于Gram-Schmidt的图像融合方法概述
基于Gram-Schmidt的图像融合方法概述摘要遥感图像融合的目的是综合来自不同空间分辨率和光谱分辨率的遥感信息,生成一幅具有新空间特征和波谱特征的合成图像。
它具有重要的意义和广泛的应用前景。
而由于采用的算法或变换方法的不同,融合方法有多种。
在众多的融合方法相互比较的过程中,我们发现Gram-Schmidt具有较高的图像保真效果,是一种高效的图像融合方法。
由于该算法在遥感图像融合中的应用尚处于起步阶段,对于Gram-Schmidt光谱锐化高保真的影像融合算法的了解尚不全面。
对此,对Gram-Schmidt的原理、方法、优势等做了较为详尽的介绍。
关键词遥感融合保真Gram-Schmidt 概述1 引言对于光学系统的遥感影像,其空间分辨率和光谱分辨率一直存在着不可避免矛盾。
在一定的信噪比的情况下,光谱分辨率的提高必然导致牺牲空间分辨率为代价。
然而,通过将较低空间分辨率的多光谱影像和较高空间分辨率的影像的全色波段影像的融合,可以产生多光谱和高空间分辨率的影像。
因此,各种基于不同算法的融合方法得到了迅速地发展和广泛地应用。
随着遥感技术的发展,由于对图像解译和反演目标参数的需要,一些简单的融合方法在很大程度上已经无法满足对于光谱信息保持,空间纹理信息增加的迫切需求。
例如,对于检测植被活力和生长状态,反演陆地生产力,进行环境评价和矿产勘测等,如果融合后的图像信息的保真度无法满足要求,将会导致错误结果的产生。
通常采用的遥感图像融合方法有IHS变换、Brovey变换、主成分变换、小波变换等。
虽然,这些融合方法都能够增加多光谱影像的空间纹理信息特征。
但IHS、Brovey、主成分变换等方法易使融合后的影像失真;小波变换光谱信息虽保真相对较好,但小波基选择困难,且计算相对复杂(李存军等,2004)。
基于Gram-schmidt算法的图像融合方法既能使融合影像保真度较好,计算又较为简单。
本文将对该影像融合算法的原理、方法以及所具备的优势做较为详尽的介绍。
遥感数字图像处理(山东联盟)智慧树知到答案章节测试2023年山东科技大学
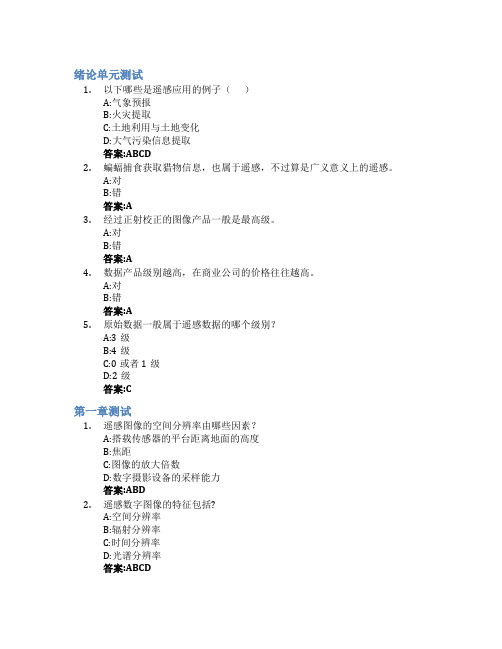
绪论单元测试1.以下哪些是遥感应用的例子()A:气象预报B:火灾提取C:土地利用与土地变化D:大气污染信息提取答案:ABCD2.蝙蝠捕食获取猎物信息,也属于遥感,不过算是广义意义上的遥感。
A:对B:错答案:A3.经过正射校正的图像产品一般是最高级。
A:对B:错答案:A4.数据产品级别越高,在商业公司的价格往往越高。
A:对B:错答案:A5.原始数据一般属于遥感数据的哪个级别?A:3级B:4级C:0或者1级D:2级答案:C第一章测试1.遥感图像的空间分辨率由哪些因素?A:搭载传感器的平台距离地面的高度B:焦距C:图像的放大倍数D:数字摄影设备的采样能力答案:ABD2.遥感数字图像的特征包括?A:空间分辨率B:辐射分辨率C:时间分辨率D:光谱分辨率答案:ABCD3.图像模数转换过程中的采样就是将电磁辐射能量离散化。
A:错B:对答案:A4.模拟图像与数字图像最大的区别在于:模拟图像中物理量的变化是连续的,而数字图像中物理量的变化是离散的。
A:错B:对答案:B5.图像的灰度直方图,其横坐标为像元的位置,纵坐标为像元的数量。
A:对B:错答案:B6.图像空间分辨率小于显示分辨率时,原图的显示质量得到了增强。
A:对B:错答案:B第二章测试1.数字图像在计算机上是以()方式存储的A:十六进制B:八进制C:二进制D:十进制答案:C2.比特序中的小端是指将高比特位(即逻辑上的高数据位)存储在低比特地址(即物理上的存储地址)。
A:对B:错答案:B3.ENVI软件标准格式的图像文件是_____存储格式A:封装式B:开放式答案:B4.假设有一幅2列、2行、3波段的遥感数字图像,各波段的数字值如下:25 1 2 4 34 3 3 4 2 1请选出该图像正确的BSQ存储方式:A:2,5,1,2,4,3,4,3,3,4,2,1B:2,5,4,3,1,2,3,4,4,3,2,1C:2,5,4,3,4,3,2,1,1,2,3,4D:2,1,4,5,2,3,4,3,2,3,4,1答案:B5.假设有一幅2列、2行、3波段的遥感数字图像,各波段的数字值如下:25 1 2 4 34 3 3 4 2 1请选出该图像正确的BIP存储方式:A:2,5,4,3,4,3,2,1,1,2,3,4B:2,5,1,2,4,3,4,3,3,4,2,1C:2,1,4,5,2,3,4,3,2,3,4,1D:2,5,4,3,1,2,3,4,4,3,2,1答案:C第三章测试1.数字图像处理的()过程中,输出图像每个像元的灰度值仅由对应的输入像元点的灰度值决定,它不会改变图像内像元之间的空间关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 0 1 5年 7月
湖南师范大学 自然科学学报
J o u r n a l o f Na t u r l a S c i e n c e o f Hu n a n No r ma l U n i v e r s i t y
Vo1 . 3 8 No . 4
第3 8卷 第 4期
关键词
集合匹配 ; 人脸识别 ; 模 式识 别
T P 3 9 1 . 4 1 文献标识码 A 文章编号 1 0 0 0 - 2 5 3 7 ( 2 0 1 5 ) 0 4 - 0 0 7 4 - 0 6
中图 分 类 号
I ma g e Se t Ma t c h i n g Ba s e d o n Co v a r i a n c e Ma t r i x
p o i n t s i n t h e R i e m a n n i a n ma n i f o l d .T h e p r o p o s e d me t h o d i s e v a l u a t e d i n s e t — b a s e d o b j e c t c l a s s i i f c a t i o n a n d f a c e
m u l a t e d a s ma t c h i n g p o i n t s l y i n g o n t h e R i e m a n n i a n ma n i f o l d s p a n n e d b y s y m me t i r c p o s i t i v e d e i f n i t e( S P D) , i . e .
Abs t r a c t An i ma g e s e t ma t c h i ng me t h o d i s p r o p o s e d,i n wh i c h t he pr o b l e m o f t h e i ma g e s e t ma t c h i n g i s f o r -
s e t - b a s e d o b j e c t ma t c h i n g a n d f a c e r e c o ni g t i o n me t h o d s w i t h r e c o ni g t i o n r a t e o f 9 6 %a n d 9 5 . 5 %i n t h e E T H 8 0 o b -
j e c t d a t a b a s e nd a Ho n d a U C S D v i d e o d a t a b a s e , r e s p e c t i v e l y .
Ke y wo r d s s e t ma t c h i n g;f a c e r e c o g n i t i o n;p a t t e r n r e c o ni g t i o n
n o n s i n g u l a r c o v a ia r n c e ma t ic r e s .Th e s i mi l a r i t y b e t we e n t wo i ma g e s e t s i s c o n v e ne d i n t o t h e d i s t a n c e b e t we e n t wo
摘
要
提出了一种 图像集合 匹配方 法 , 该方法通过 协方差矩 阵对 图像 集合建 模 , 利 用对称正 定的非奇 异协
方差矩阵构成 黎曼 流形 上的子空间 , 将 图像集的匹配转化为黎曼流 形上 的点 的匹配问题. 在E T H 8 0和 H o n d a U C S D 数据库分别进行了基于图像 集合的对象识 别和人脸识别实验 , 分别达到 9 6 %和 9 5 . 9 %的识别率.
r e c o g n i t i o n t a s k s ,e x t e n s i v e e x p e i r me n t l a r e s u l t s s h o w t h a t t h e p r o p o s e d me t h o d o u t p e r f o r ms o t h e r s t a t e o f t h e a r t
J u 1 . , 2 01 5
D O I : 1 0 . 7 6 1 2 / j . i s s n . 1 0 0 0 - 2 5 3 7 . 2 0 1 5 . 0 4 . 0 1 3
基 于 协 方 差 矩 阵 表 示 的 图像 集 匹 配
詹 增荣 , 曾青松
( 广州番 禺职业技术学院信息工程学院 ,中国 广 州 5 1 1 4 8 3 )
Z H A N z e 一 r o n g , Z E N G Q i g— n s o n g
( S c h o o l o f I n f o ma r t i o n E n g i n e e r i n g , G u a n g z h o u P a n y u P o l  ̄ e c h n i c ,G u a n g z h o u 5 1 1 4 8 3 , C h i n a )