SICK 编码器附件
SICK条码扫描器CLV6
过使用外部参数克隆功能实现的无需
使用电脑进行配置,这样可以保证快
速的平均修复时间 (MTTR)*)。
聚焦 固定聚焦型号用于固定焦距的应用, 动态聚焦型号用于有多种读取距离的 应用,还可以根据实时集成距离检测 仪实现自动对焦点转换(无需再配备 光电传感器)。
优化全部生产过程
现今,企业要发展,必须 注重过程而不是功能;必 须排除不灵活的工作过程, 全面优化价值的生产过程。 因此,必须要有一个整体 的,而不是单纯地解决某 一问题的自动化解决方案。
作为全球自动化、安全技 术、环境监测系统和自动 识别系统等传感器领域的 佼佼者,SICK公司致力于 发展工业过程的现代化和 合理化。
阅读距离 • 利用外部参数克隆功能实现快速、简便的更换条
码扫描器
汽车行业
• 阅读距离远 • 具有自动聚焦和动态聚焦型号 • 灵活的现场总线连接 • 快速接头方式 • 无硅 • 利用外部参数克隆功能实现快速、简便的更换条码扫
描器
电子行业
• 紧凑型产品,适用于宽度极小的模块 • 对部分遮盖、污损或对比度低的条码都能提供优异的
• 多样的聚焦模式(固定聚焦、动态聚焦和自动聚焦)几 乎覆盖了所有的读取距离
易于使用
• 简单直观的用户界面 SOPAS-ET Single Device 或 SOPASET(请参见第 32 页)
• 配备连接助手,连接条码扫描器更快捷。无需额外的现 场总线。
• 通过集成按钮、LED 条形图和智能化自动设置功能即可 实现简便设置,无需电脑主机。
外部镜罩 邻输送带之间时,外部镜罩可以缩短阅读距离。
前置读取窗口
侧面读取窗口
侧面读取窗口, 带摆镜
线式扫描器 光栅扫描器 线式扫描器,带摆镜
SICK绝对式编码器
R=最 小 弯 曲 半 径4 0 mm
其 它 公 差 遵 循DIN ISO-2768-mk标准
出线方式 径向出线式
径向插头式
附件 接线电缆 通孔轴套 S S I串 口 转 并 口 模 块
C1-6
技术参数
机械参数
外径 轴径 启 动 转 矩( 2 0℃) 工 作 转 矩( 2 0℃) 瞬时惯量 最大允许转速 最大角加速度 元件轴允许跳动
轴向出线式
径向插头式
轴向出线式
技术参数
机械参数
外径 轴径 启 动 转 矩( 2 0℃) 工 作 转 矩( 2 0℃) 瞬时惯量 最大允许转速 最大角加速度 元件允许轴跳动
轴承使用寿命 工作温度 存储温度 允 许 相 对 湿 度1) 抗振性能
外壳防护等级 IEC 60529
质 量5)
A R S 6 0盲 孔 型
电气参数
工作电压 工作电流
测量量程 分辨率 角度分辨率 测量误差
重复精度 角度分辨率偏差
测量值回差 响应阈值 输出接口 输出码
编 码 方 向6) “控制输入”的 "电 脉 冲"信 号 零 位 设 定 时 间7) 上电初始化时间 EMC8)
10-32V DC SSI:60mA 并 口:90mA
1圈
2...32,768(参见 订货 信息) 360°/分辨 率 2 n 分 辨率: 0.035° 非2 n 分 辨 率: 0.046° 0.005° 2 n 分 辨 率: 0.005° 非2 n 分 辨 率: 0.016°
分辨率 1...32,768
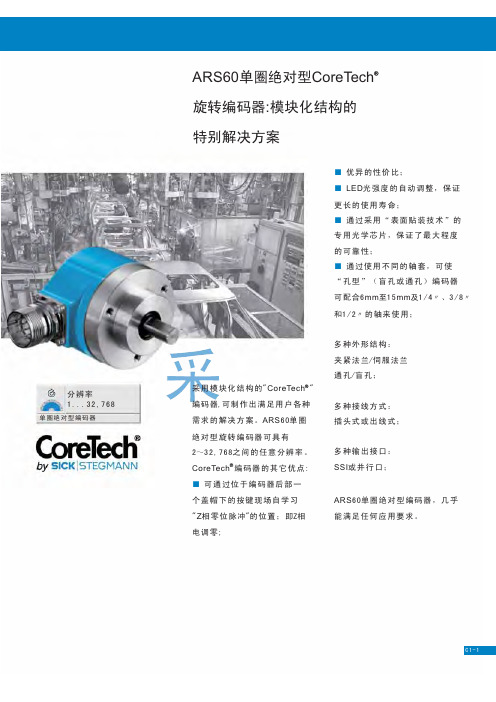
单圈绝ch 旋转编码器:模块化结构的 特别解决方案
■ 优异的性价比; ■ LED光 强 度 的 自 动 调 整 , 保 证 更长的使用寿命; ■ 通过采用“表面贴装技术”的 专用光学芯片,保证了最大程度 的可靠性; ■ 通过使用不同的轴套,可使 “孔型”(盲孔或通孔)编码器 可 配 合6mm至1 5mm及1/ 4〃 、3 / 8〃 和1/2〃 的 轴 来 使 用 ;
西克线性编码器KH53_Data_sheet_2007

TKH53/KH53 Advanced:Absolute Linear Encoders.Wear-free for roughenvironmental conditionsDA T ASH E E TThe POMUX KH53 absolute linear encoder functions on the transmitter/receiver principle.Because of the absolute position detection, an initialising reference run is not necessary.The measuring method: A read head determines without contact,the absolute position of a series of scale sections, which aremounted along the measurement section.The read head consists of a se-ries of magnetoresistive sensors,which can always detect the positionof at least 3 permanent magnets to determine the absolute position.The measuring elements are manu-factured from aluminium and are re-ferred to as measuring elements:These are mounted in a row at fixed intervals with the aid of a mounting gauge until the desired measuring length is reached. Fitted within each measuring element are permanentmagnets, whose spacing from one another represents the unique encoding of a portion of the measurement section. The read head moves parallel to these measuring elements. The sepa-ration of read head and measuring element is 25 mm resp. 55 mm.With a measuring length of up to 1,700 m, the KH53 is particularlysuitable for use in cranes, in storageand conveyor engineering and on rail-bound vehicles. As a result of the non-contact principle of opera-tion, this system operates without wear even under the harshest envi-ronmental conditions.POMUX ®07-20072SICK-STEGMANNAbsolute Linear Encoder KH53 SSIMeasuring length up to 1.7 km Non-contact length measuring system, wear freeAbsolute position measurement no initialising reference run Choice of electrical interfaces Position sampling time independent of lengthDegree of protection up to IP 66View of the connector M23 fitted tothe encoder body SSI1)Other Interfaces on requestPIN Signal Colour of wires Explanation(cable outlet)1GND blue Earth (ground) connection 2data +white Interface signal 3clock +yellow Interface signal4R x D +grey RS 422 Programming lines 5R x D –green RS 422 Programming lines 6T x D +pink RS 422 Programming lines 7T x D –black RS 422 Programming lines 8+ U sred Supply voltage 9N. C.orange Not connected 10data –brown Interface signal 11clock –violet Interface signal 12N. C.–Not connected 57plugged onwith 12-pin connectorwith Pg outlet20Length read headBending radius ≥ 80Bending radius > 8085161.129.05Ø23.5Ø10 3.5Length Measuring Element (ME)1561024Ø7307-20073KH53 SSISICK-STEGMANN 07-20072)3)4)With mating connector fitted5)If the max. movement speed is excee-ded or the read head cannot detect a measuring element the error message FF FF FE Hex is produced.1)If the read head and measuring element are mounted within ± 1 mm of the no-minal mounting distance in the N and Y directions. The figures quoted related to the accuracy within a measuring ele-ment with reference to the start of that measuring element.ME = length measuring element Tu = Ambient temperature °C (see diagram page 5)2)According DIN EN 61000-2-27the shock resistance can be considerab-ly increased in special variants.3)According DIN EN 61000-2-6the vibration resistance can be consider-ably increased in special variants.4SICK-STEGMANNAbsolute Linear Encoder KH53 SSIMeasuring length up to 1.7 km Non-contact length measuring system, wear freeAbsolute position measurement no initialising reference run Choice of electrical interfaces Position sampling time independent of lengthDegree of protection up to IP 66A number of special features must be observed for use of this interface in POMUX KH53 :Standard operationThe digital angle information cannot be read directly from a coding disc but is formed by complex computation algo-rithm from a number of analog voltages,it is not possible to detect the position value associated with this time when first trailing edge of the clock signal oc-curs.During standard operation, the KH53forms a position value cyclically every 800 μs irrespective of the SSI read cy-cle, and places this value in the output register provided for this purpuse, for re-covery by the interface. Since the SSI read cycle and the position forming cy-cle can never be the same, this results in a continuous shift in the time position assignment.In other words:The time assignment of the position value fluctuates from 5 μs to 800 μs in this operating mode.Synchronous SSI-OperationThe synchronous SSI operating mode can be connected via the parametris-ing interface in order to avoid the fluc-tuation of the time position assign-ment, which can lead to highly unpre-dictable behaviour of the control loop.In this operating mode, position detec-tion is started on the first trailing edge of the SSI pulse, and the position is detected using the last pulse group.In order to keep the delay time of bet-ween position measurement and posi-tion transmission as short as possible,the position measurement can be de-layed by parameterising a waiting time.This ensures that the current position is measured as shortly as possible be-fore the SSI clock group.The waiting time t w must be less than the SSi cycle time t z minus the clock time t t minus 820 μs.Waiting time condition t w < t z - t t - t c t c= 820 μsasynchronous interface (Default).07-20075SICK-STEGMANN KH53 SSI07-2007Zero mark on the read headRead headRead headZeroMeasuring elementConnector or cable outlet always at this positionAssumed position of the last permanent magnetLast Measuring elementStart of measuring pathEnd of measurement pathPosition tolerances The reliability and accuracy of the measuring system are dependent upon maintaining the mounting tolerances! Magnetic and materials that can be magnetised, are not allowed within a radius of 80 mm of the measuring elements and the sensing face of the encoder.1Read head2Measuring elementKH53KH53 Advanced 12N = 25 mm ± 10Y± 10The reliability and accuracy of the measuring system are dependent upon maintaining the mounting tolerances! Magnetic and materials that can be magnetised, are not allowed within a radius of 80 mm of the measuring elements and the sensing face of the encoder.1Read head2Measuring element12N = 55 mm ± 20Y± 206SICK-STEGMANNKH53 SSI Order informationen0.886 m 39.90 m Read head length Measuring length up to Length of measuring element incl. separation 2.304 mIdentification letters A1 … ՅA181.8688 mIdentification letters B1 … ՅB582.5088 mIdentification letters C1 … ՅC1411.9072 mIdentification letters D1 … ՅD8801.051 m 107.40 m 1.376 m 351.20 m2.026 m1676.40 mOrder informationCalculation example for a measuring length of 100 m Choose the system with a max. measuring length of 107 m Desired measuring lengthLength of measuring element (according to table above)Number of measuring element = 100 m/1.8688 m = 53.51Ordering quantity is therefore 54pcs measuring elements and 54 * 3 = 162 spacer supportsIf two separate measuring lengths are required, then please order as 2 x 54measuring elements (not 108measuring elements)Length measuring systemsKHK53-AXR000381030048Part no.TypeMeasuring element length Read head 38, SSI, cable 1.5 m KHK53-AXS000381030049Read head 38, SSI, cable 3.0 m KHK53-AXT000381030050Read head 38, SSI, cable 5.0 m KHK53-AXU000381030051Read head 38, SSI, cable 10.0 mKHK53-AXB000381030052Read head 38, SSI, connector M23, 12-pin KHT53-XXX000381030055Measuring element up to 38 m, codedKHU53-XXX000381030056Measuring element up to 38 m, universal, configurable 1)KHM53-XXX000381030057Mounting gauge 38Length measuring system KH53 - absolute, linear; measuring length up to 38 m Number of measuring elements required =1)For temporary replacement of damaged measuring elementsOrder informationDimension and calculation table KH53Mounting equipment per measuring element (proposed)4 Spacer supports or 8 Fastening clamps 3 Spacer supports or 6 Fastening clamps 4 Spacer supports or 8 Fastening clamps 3 Spacer supports or 6 Fastening clamps1.58 m 53.50 m Read head length Measuring length up to Length of measuring element incl. separation 1.408 mIdentification letters F1 … ՅF392.3552 mIdentification letters G1 … ՅG2332.506 m546.40 mDimension and calculation table KH53 Advanced Mounting equipment per measuring element (proposed)3 Spacer supports or 6 Fastening clamps 4 Spacer supports or 8 Fastening clamps The dimensions given are slightly rounded.Caution!For valid position determination, the reading head must not travel over the end of the last measuring element. The part of the calculated measure-ment path which can actually be used for position determination is thus shortened by the length of the reading head.Length of measuring element incl. separation07-20077SICK-STEGMANN1)KH53 SSI07-20078Absolute Linear Encoder KH53 ProfibusSICK-STEGMANNMeasuring length up to 1.7 km Non-contact length measuring system, wear freeAbsolute position measurement no initialising reference run Choice of electrical interfaces Position sampling time independent of lengthDegree of protection up to IP 6729.05Ø23.5Ø103.5Measuring element length (ME)1561024Ø73Connect.Connect.Connect.Signal Explanation4-pin (Male)5-pin (Male)5-pin (Female)1––Us (24V)Supply voltage 10 … 32V 3––0V (GND)Ground (0V)––4B B-cable Profibus DP (OUT)––2 A A-cable Profibus DP (OUT)–4– B B-cable Profibus DP (IN)–2–A A-cable Profibus DP (IN)––12P5 1)+ 5V (potential free)––32M 1)0V (potential free)–––RTS 2)Request to Send 21–N. C.–43–N. C.––55ScreenHousing potential1)For the connection of external bus termi-nation or to supply the transmitter/recei-ver of a fibre optic data transfer system.2)This signal is optional for the direction ack-nowledgement for a fibre optic connection.07-2007red9SICK-STEGMANN KH53 Profibus07-20074)With mating connectors fitted 5)If the max. movement speed is excee-ded or the read head cannot detect a measuring element an error message is produced.1)If the read head and measuring element are mounted within ± 1 mm of the no-minal mounting distance in the N and Y directions. The figures quoted related to the accuracy within a measuring ele-ment with reference to the start of that measuring element.ME = length measuring element Tu = Ambient temperature °C (see diagram page 5)2)According DIN EN 61000-2-27the shock resistance can be considerab-ly increased in special variants.3)According DIN EN 61000-2-6the vibration resistance can be consider-ably increased in special variants.6)Acc. EN 50 170-2 (DIN 19245 part 1-3)DC isolated via opto-couplers7)Activation only at the last bus subscriver of the line.2)3)10Absolute Linear Encoder KH53 ProfibusSICK-STEGMANNDP FunctionalitiesIn acc. with the Profibus DP basic functions.DP services•Data interchange (Write_Read_Data)•Address allocation (Set_Slave_Address)•Control commands (Global_Control)•Read the inputs (Read_Inputs)•Read the outputs (Read_Outputs)•Read diagnostic data (Slave_Diagnosis)•Send configuration data (Set_Param)•Check configuration data (Chk_Config)Communication•Cyclic Master-Slave Data transfer Protective mechanisms •Data transfer with HD = 4•Time monitoring of the data traffic ConfigurationSettings in accordance with encoder profile •Counting direction (CW, CCW)•Class-2 functionality (ON, OFF)•Scaling function (ON, OFF)•…Activation of SSA-service“ 2)•Selection of the station address 2)ConfigurationSetting the formats (IN/OUT) for the cyclic-data interchange via one configuration byte (K-1).2 words IN/OUT data (I-1/O-1) 1)4 words IN/OUT data (I-1, I-2, I-3/O-1) 2)Data interchange: - Input Data (IN)I-1 Position value 1) 4 bytesI-2 Speed (0,1m/min) 2)2 bytes I-3 Time stamp 2) 2 bytesData interchange: - Output data (OUT)O-1 PRESET Value 1)4 bytesDiagnostic informationStation-related diagnosis (63 bytes in accor-dance with Encoder Profil Class-2)Setting: - PRESET valueThe PRESET function is used for commis-sioning, and to allocate a specific position value to the current physical position.The following settings are possible:•by software: -- (see Output data )Setting: - Counting direction •by hardware via Hex switch S2•by software via telegram Counting direction increasing:When the encoder travels in the direction of measuring element n to measuring element n+1.Setting: - Station Address•by hardware via Hex switch S1/S2•by software via telegramThe setting by software is carried out only if the …SSA-service“ has been previously ac-tivated.Device specific file (*.GS_)For the purpose of automatic commissioning of the encoder,use is made of the *.GS_-file. All the characteristic features of the device are defined in it.STEG05F6.GSD German STEG05F6.GSEEnglish1)As per Encoder Profile2)Manufacturer-specific function07-2007S1S211SICK-STEGMANN KH53 Profibus07-2007Zero mark on the read headRead headRead headZeroMeasuring elementConnector or cable outlet always at this positionAssumed position of the last permanent magnetLast Measuring elementStart of measuring pathEnd of measurement pathPosition tolerances The reliability and accuracy of the measuring system are dependent upon maintaining the mounting tolerances! Magnetic and materials that can be magnetised, are not allowed within a radius of 80 mm of the measuring elements and the sensing face of the encoder.1Read head2Measuring elementKH53KH53 Advanced 12N = 25 mm ± 10Y± 10The reliability and accuracy of the measuring system are dependent upon maintaining the mounting tolerances! Magnetic and materials that can be magnetised, are not allowed within a radius of 80 mm of the measuring elements and the sensing face of the encoder.1Read head2Measuring element12N = 55 mm ± 20Y± 2012KH53 ProfibusSICK-STEGMANNDimensional drawing and order informationLength of measuring element incl. separation0.905 m 39.90 m Read head length Measuring length up to Length of measuring element incl. separation 2.304 mIdentification letters A1 … ՅA181.8688 mIdentification letters B1 … ՅB582.5088 mIdentification letters C1 … ՅC1411.9072 mIdentification letters D1 … ՅD8801.070 m 107.40 m 1.395 m 351.20 m2.045 m1676.40 mDimension and calculation table KH53Mounting equipment per measuring element (proposed)4 Spacer supports or 8 Fastening clamps 3 Spacer supports or 6 Fastening clamps 4 Spacer supports or 8 Fastening clamps 3 Spacer supports or 6 Fastening clamps1.599 m 53.50 m Read head length Measuring length up to Length of measuring element incl. separation 1.408 mIdentification letters F1 … ՅF392.3552 mIdentification letters G1 … ՅG2332.525 m546.40 mDimension and calculation table KH53 Advanced Mounting equipment per measuring element (proposed)3 Spacer supports or 6 Fastening clamps 4 Spacer supports or 8 Fastening clamps The dimensions given are slightly rounded.Order informationCalculation example for a measuring length of 100 m Choose the system with a max. measuring length of 107 m Desired measuring lengthLength of measuring element (according to table above)Number of measuring element = 100 m/1.8688 m = 53.51Ordering quantity is therefore 54pcs measuring elements and 54 * 3 = 162 spacer supportsIf two separate measuring lengths are required, then please order as 2 x 54measuring elements (not 108measuring elements)Number of measuring elements required =Caution!For valid position determination, the reading head must not travel over the end of the last measuring element. The part of the calculated measure-ment path which can actually be used for position determination is thus shortened by the length of the reading head.07-200713SICK-STEGMANN1)For temporary replacement of damaged measuring elements07-2007KH53 Profibus14Absolute Linear Encoder KH53 ProfibusSICK-STEGMANN07-2007The following settings are possible via Hex switch:S1/S2Address setting (0 … 127)S2Counting direction (CW/CCW)Access is provided via a screw cap on the connector side of the read head.The KH53 Profibus is an absolute length measuring system with a re-solution of 100 μm. The Bus coupling is realised within the encoder and is a Profibus DP slave in accordance with EN 50170 Vol. 2. The realisation of the Profibus interface is performed by the Profibus ASIC SPC3 from Siemens.The KH53 Profibus encompasses all Class 2 functions in accordance with Encoder Profile (1.1)The encoder is implemented as a DP slave with general DP functions.Status Information via LEDsLED-1Bus activity (red)LED-2Operating voltage (green)The conformance of the encoder with Profibus DP was verified by the PNO certified test centre.The following options are available:•Screw-in connnector system M1215SICK-STEGMANN Accessories Connection Systems07-200716SICK-STEGMANNAccessories Connection Systems07-200717SICK-STEGMANN 1030111Part no. PGT-01-SType Programming ToolProgramming Tool for KH53 (with SSI Interface)2042468Part no. BEF-KHK-KHT53TypeMounting systemsSpacer support for KH53, bored with srews 2029159Part no. BEF-WK-KHT53TypeFastening clamp for KH53, screws not included 37DOS-0D37-G2029224Part no. Type Contacts15STE-0D15-G2029223ContactsPart no. Type ExplanationSSI Parallel Adapter module, with plastic housing SSI Parallel Adapter module, without plastic housingAdapter module for SSI interface 1030106Part no. AD-SSIG-PA Type Serial Parallel Adapter AD-SSI-PA1030107Connection system Sub-D for Adapter modules Cable connector Sub-D male, 15-pin, straight, screened Cable connector Sub-D female, 37-pin, straight, screened 07-2007Dimensional drawings and order information KH53Ø 5.750999961148609285976General tolerances according to DIN ISO 2768-mkGeneral tolerances according to DIN ISO 2768-mk18SICK-STEGMANN07-2007KH5307-200719 SICK-STEGMANN8 010 310/2007-07-19 • M D /5/200 • P r i n t e d i n G e r m a n y (07.07) • S u b j e c t t o c h a n g e w i t h o u t n o t i c e . T h e s p e c i f i e d p r o d u c t f e a t u r e s a n d t e c h n i c a l d a t a d o n o t r e p r e s e n t a n y g u a r a n t e e . 01 A 4 S t e 2c i n t 28SICK AG • Waldkirch • Germany • SICK STEGMANN GmbH • Donaueschingen • Germany • www.sick-stegmann.deAustraliaPhone +61 3 9497 41001800 33 48 02 – tollfreeE-Mail sales@.au Belgium/LuxembourgPhone +32 (0)2 466 55 66E-Mail info@sick.be BrasilPhone +55 11 5091-4900E-Mail sac@.brCeská RepublikaPhone +420 2 57 91 18 50E-Mail sick@sick.cz ChinaPhone +852-2763 6966E-Mail ghk@ DanmarkPhone +45 45 82 64 00E-Mail sick@sick.dk DeutschlandPhone +49 211 5301-250E-Mail info@sick.de EspañaPhone +34 93 480 31 00E-Mail info@sick.es FrancePhone +33 1 64 62 35 00E-Mail info@sick.frGreat BritainPhone +44 (0)1727 831121E-Mail info@ IndiaPhone +91–22–2822 7084E-Mail info@ ItaliaPhone +39 011 79 79 65E-Mail info@sick.itJapanPhone +81 (0)3 3358 1341E-Mail support@sick.jp NederlandsPhone +31 (0)30 229 25 44E-Mail info@sick.nl NorgePhone +47 67 81 50 00E-Mail austefjord@sick.noÖsterreichPhone +43 (0)22 36 62 28 8-0E-Mail office@sick.at PolskaPhone +48 22 837 40 50E-Mail info@sick.pl Republic of KoreaPhone +82-2 786 6321/4E-Mail kang@ Republika SlowenijaPhone +386 (0)1-47 69 990E-Mail office@sick.si RussiaPhone +7 495 775 05 34E-Mail denis.kesaev@sickautomation.ru SchweizPhone +41 41 619 29 39E-Mail contact@sick.ch SingaporePhone +65 6744 3732E-Mail admin@.sg SuomiPhone +358-9-25 15 800E-Mail sick@sick.fi SverigePhone +46 10 110 10 00E-Mail info@sick.seTaiwanPhone +886 2 2365-6292E-Mail sickgrc@ TürkiyePhone +90 216 587 74 00E-Mail info@.tr USAPhone +1 937-454-1956E-Mail sales@More representatives and agencies in all major industrial nations at 。
西克SICK_DFS60增量型编码器

使用DFS60系列编码器,客户不需要根据应用来 选择种类繁多的不同分辨率的产品型号,库存管 理变得简单化和经济化,同时“停机时间大大减 少”---因为DFS60可以被编程改变成范围内的任 意分辨率而适合不同的应用!
300 kHz 300 kHz
± 0,3o
4)符合“EN60068-2-27 5)符合EN60068-2-6
600 kHz 600 kHz 600 kHz ± 0.05o
30 mA 30 mA 30 mA 30 mA 40 mA 40 mA 40 mA 60 mA 40 ms 40 ms 40 ms 1000ms 1…65,536
E型-可选择的分辨率 00100 00200 00250
00314 00360
00500 00512 00720
01000 01024 01250
00200 02048
B型-可选择的分辨率 00050 00100 00200 00250
00300 00314 00360
00500 00512 00720
02000 02048 02500 03600
04000 04096 05000
07200 08192 10000
16384 32768 65536
DFS60 增量型旋转编程器,E型,实心轴10× 19 mm 电气接口:10…32 V,HTL/推挽,M12,8针插头,径向,分辨率1,024线
1
2
3
4
夹紧法兰型外形尺寸图,M12或M23插头式
其它公差遵循DIN ISO 2768-mk标准
电缆直径- =5.6±0.2mm 弯曲半径 R=30mm
sick 拉线式编码器 canopen eds 使用例程 -回复

sick 拉线式编码器canopen eds 使用例程-回复Sick拉线式编码器是一种用于测量旋转或线性运动的装置,通常用于工业自动化领域。
CanOpen是一种用于控制和通信的网络协议,而EDS 是CanOpen设备描述文件。
在本文中,我们将详细介绍Sick拉线式编码器与CanOpen和EDS的使用实例。
第一步:了解Sick拉线式编码器Sick拉线式编码器是一种高精度的运动测量设备,可用于测量旋转、线性运动和位置。
它由一个固定的位置参考点和一个可移动的测量元件组成。
拉线式编码器可以在各种工业应用中使用,包括机械制造、自动化装置和机器人。
Sick拉线式编码器的工作原理基于光电和传感技术。
当测量元件相对于位置参考点移动时,光电传感器会检测到这个移动,并将其转换为电信号。
通过测量电信号的特征,可以确定测量元件的位置、运动和速度。
第二步:了解CanOpenCanOpen是一种用于控制和通信的开放型网络协议。
它基于CAN总线,并支持分布式控制系统。
CanOpen提供了一种标准化的方法来管理网络中的节点和设备,并使它们之间进行通信。
CanOpen定义了一组对象字典和通信机制,使得节点可以共享和访问设备的状态和功能。
CanOpen协议使用了一种基于消息的通信模型。
节点之间通过发送和接收消息来进行通信。
每个节点都有一个唯一的标识符,称为节点ID,用于区分不同的节点。
CanOpen消息包括一个固定格式的帧,其中包含了发送和接收节点的ID、指令和数据。
第三步:了解EDSEDS,全称是Electronic Data Sheet,是CanOpen设备描述文件的一种。
EDS文件用于描述和定义CanOpen设备的功能和特性。
它包含了设备的对象字典、通信参数、数据类型和映射等信息。
EDS文件使得CanOpen主站能够正确地识别和配置CanOpen设备,以实现正确的通信和控制。
EDS文件是一个文本文件,使用XML格式进行描述。
sick绝对值编码器单圈数和多圈数

一、概述随着工业自动化的发展,编码器作为一种用于测量运动位置和速度的重要装置,得到了广泛的应用。
sick绝对值编码器作为一种性能稳定、精度高的编码器产品,其单圈数和多圈数的设计能够满足不同应用场合的需求,受到了市场的青睐。
本文将从sick绝对值编码器的单圈数和多圈数两个方面进行探讨和介绍。
二、sick绝对值编码器单圈数的特点和应用1. 单圈数概念单圈数是指编码器在一周内的旋转信号数,通常用来描述编码器的分辨率。
sick绝对值编码器单圈数的特点在于其具有高分辨率、低误差率和多种输出信号类型的优点。
2. 单圈数的应用在工业自动化中,sick绝对值编码器的高分辨率可以精确测量物体的位置和速度,可广泛应用于机床、机器人、输送机、自动化设备等领域。
其低误差率能够有效提高生产效率和产品质量。
三、sick绝对值编码器多圈数的特点和应用1. 多圈数概念多圈数是指编码器在多圈内的旋转信号数,与单圈数相比,多圈数编码器具有更高的分辨率和更广范围的应用。
2. 多圈数的应用sick绝对值编码器多圈数主要用于需要进行高精度测量的领域,如航空航天、汽车制造、医疗设备等。
其高分辨率和广泛的应用范围,使其成为许多高要求行业的首选产品。
四、sick绝对值编码器单圈数和多圈数的对比分析1. 分辨率相比单圈数编码器,多圈数编码器具有更高的分辨率,可以实现更精确的位置和速度测量。
2. 应用范围单圈数编码器主要适用于一些对精度要求不太高的应用场合,如一般的工业生产线。
而多圈数编码器主要用于一些对精度要求非常高的场合,如精密加工设备等。
3. 成本由于多圈数编码器具有更高的技术含量和更广泛的应用范围,其价格通常会高于单圈数编码器。
五、结论通过对sick绝对值编码器单圈数和多圈数的介绍和比较分析,我们可以看出,这两种编码器均具有各自的特点和优势,在不同的应用场合中发挥着重要作用。
在选择编码器时,应根据实际需求和预算进行合理的选择。
期待sick绝对值编码器在自动化领域的应用能够为工业生产和人们的生活带来更多的便利与效益。
sick西克增量编码器技术参数
西克增量编码器技术参数1. 介绍在工业自动化领域,增量编码器是一种广泛应用的传感器,用于测量旋转设备的角位移和角速度。
西克(SICK)作为增量编码器领域的专家,其产品拥有先进的技术参数和性能表现,为工业生产提供了可靠的角位移测量解决方案。
2. 分辨率在选择增量编码器时,分辨率是一个重要的技术参数。
西克增量编码器通常具有高分辨率,能够精确地测量角位移和角速度。
高分辨率的增量编码器可以提供更精确的位置反馈,适用于对精度要求较高的应用场合,如机械加工和定位控制。
3. 脉冲数脉冲数是另一个重要的技术参数,它表示增量编码器在一圈内输出的脉冲个数。
西克增量编码器通常具有可调的脉冲数,可以根据实际需求进行设置。
较高的脉冲数可以提供更精细的角位移测量,适用于对角度分辨率要求较高的控制系统。
4. 输出信号西克增量编码器通常具有多种输出信号类型,如TTL、HTL和SSI等,以满足不同控制系统的接口要求。
这些输出信号类型具有不同的电气特性和传输距离,用户可以根据实际情况选择合适的输出信号类型,方便与控制系统进行连接。
5. 环境适应性除了技术参数外,西克增量编码器还具有优秀的环境适应性。
其防护等级可以达到IP67或更高,能够在恶劣的工业环境下稳定工作。
西克增量编码器还具有良好的抗干扰能力,能够在工业噪声干扰下保持稳定的性能。
6. 总结与展望西克增量编码器技术参数优秀,具有高分辨率、可调的脉冲数、多种输出信号类型和良好的环境适应性。
它在工业自动化控制领域有着广泛的应用前景,为工业生产提供了可靠的位置反馈和运动控制解决方案。
随着工业自动化技术的不断发展,相信西克增量编码器将会在更多领域展现出其优越的性能和可靠性。
个人观点:作为一种重要的传感器设备,西克增量编码器以其卓越的技术参数和稳定的性能表现,为工业自动化领域的发展做出了重要贡献。
我相信随着工业技术的不断进步,西克增量编码器在未来会有更广阔的应用空间,为工业生产带来更高效、更稳定的控制方案。
SICK编码器参数解释

从轴端观察,轴向右侧旋转。
Rotation direction, counterclockwise (ccw)(逆时针旋转方向) 从轴端观察,轴向左侧旋转。
CW
CCW
当轴顺时针旋转时,位置值增加
July, 2014
Gareth Zheng | Confidential
20
编码器参数
性能参数 Resolution(分辨率)
可以结合这2个数值。但单个数值必须在其限制范围内。 例如,轴偏移 0.3mm 并且轴摆动约 ± 0.1mm。然后,轴的移动范围是从 +0.2mm 到 + 0.4mm.
解释:
轴向移动
径向移动
机械部分 /电机
July, 2014
Gareth Zheng | Confidential
19
编码器参数
机械接口 Rotation direction, clockwise (cw)(顺时针旋转方向)
SICK 编码器参数解释
Gareth Zheng Technical Support & Service July, 2014
编码器基本分类
增量与绝对值
July, 2014
Gareth Zheng | Confidential
2
编码器基本分类
直线测量
July, 2014
Gareth Zheng | Confidential
机械接口 允许动态径向驱动装置轴位移
动态径向轴位移是轴的误差。它由轴的摆动产生。这误差是动态的,因为 它由轴的旋转移动产生。对于DFS60,最大值允许到± 0.1mm。
July, 2014
Gareth Zheng | Confidential