十二通道GPS信号发生器的硬件设计
基于FPGA的12通道GPS数字相关器设计

基于FPGA的12通道GPS数字相关器设计
滕依良;陈佳品;李振波
【期刊名称】《计算机工程与设计》
【年(卷),期】2009(030)012
【摘要】分析了传统全球定位系统(GPS)接收机中相关器芯片的功能特点,提出一种基于现场可编程门阵列(FPGA)的GPS算法快速验证平台.采取模块化设计方法,在FPGA上使用硬件描述语言编码实现12通道数字相关器的功能逻辑,并利用ARM微控制器对相关结果进行基带处理,完成对GPS卫星信号的载波解调、C/A 码跟踪以及导航电文解码,给出了对实时运行结果的分析.该数字相关器在提供较高定位精度的同时,其各个功能模块可以即时修改和测试,大大缩短了信号处理算法的开发周期.
【总页数】4页(P2826-2829)
【作者】滕依良;陈佳品;李振波
【作者单位】上海交通大学,微纳科学技术研究院薄膜与微细技术教育部重点实验室,上海200240;上海交通大学,微纳科学技术研究院薄膜与微细技术教育部重点实验室,上海200240;上海交通大学,微纳科学技术研究院薄膜与微细技术教育部重点实验室,上海200240
【正文语种】中文
【中图分类】TP368
【相关文献】
1.基于DSP Builder GPS单通道相关器的设计 [J], 张振周;胡辉
2.一种GPS接收机数字通道相关器的设计 [J], 董军
3.基于FPGA的GPS中频信号跟踪相关器设计与实现 [J], 张侃;王庆;潘树国
4.GPS接收机12通道相关器GP2021的原理与应用 [J], 赵梦;张颖光
5.基于FPGA的多通道综合孔径辐射计数字相关器 [J], 马腾;吴琼之;廖春兰
因版权原因,仅展示原文概要,查看原文内容请购买。
gps信号发生器原理
gps信号发生器原理
GPS信号发生器是一种能够模拟和发射GPS信号的仪器,其原理主要基于GPS技术的定位原理。
GPS技术利用卫星向地球发射信号,地面接收器接收这些信号,从而获取地球上任意位置的精确定位信息。
GPS信号发生器通过模拟GPS卫星发射的信号,将这些信号发射出去,使地面上的GPS接收器能够接收到这些信号,进而实现精确定位。
GPS信号发生器主要由时钟系统、程序控制器、模拟信号产生器、调制器和放大器等部分组成。
其中,时钟系统提供精确的定时信号,确保信号的同步和定时准确;程序控制器负责控制整个GPS信号发生器的发射过程,根据用户需求生成不同类型的GPS信号;模拟信号产生器产生高精度的GPS信号,包括P码信号、C/A码信号等;调制器将模拟信号和载波信号进行调制,生成最终的GPS信号;放大器将信号强度增加到足够水平,确保信号能够到达接收设备。
GPS信号发生器可以广泛应用于航空、地理测量、军事和科学研究等领域。
它能够提供高精度的定位信号,帮助用户获取精确的位置信息。
同时,GPS信号发生器也存在一些缺点,如价格较高、能耗较大等。
但随着技术的不断发展,GPS信号发生器的性能和价格也在不断改进和优化,使其更加适用于各种应用场景。
GPS接收机硬件组成
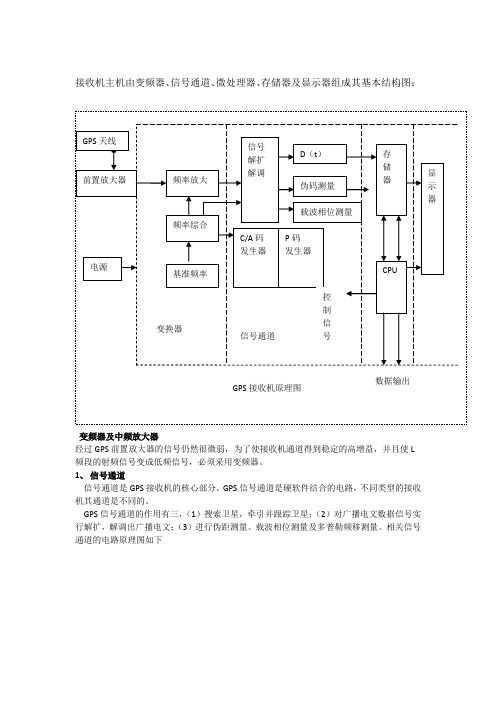
接收机主机由变频器、信号通道、微处理器、存储器及显示器组成其基本结构图:变频器及中频放大器经过GPS前置放大器的信号仍然很微弱,为了使接收机通道得到稳定的高增益,并且使L 频段的射频信号变成低频信号,必须采用变频器。
1、信号通道信号通道是GPS接收机的核心部分,GPS信号通道是硬软件结合的电路,不同类型的接收机其通道是不同的。
GPS信号通道的作用有三,(1)搜索卫星,牵引并跟踪卫星;(2)对广播电文数据信号实行解扩,解调出广播电文;(3)进行伪距测量、载波相位测量及多普勒频移测量。
相关信号通道的电路原理图如下从卫星接收到的信号是扩频的调制信号,所以要经过解扩、解调才能得到导航电文,因此在相关通道电路中设有伪码相位跟踪环和载波相位跟踪环。
2、存储器接收机内设有存储器或存储卡以存储卫星星历、卫星历书、接收机采集到的码相位伪距观测值、载波相位观测值及多普勒频移,目前GPS接收机都装有半导体存储器(简称内存),接收机内存数据可以通过数据口传到微机上,以便进行数据处理和数据保存。
3、微处理微处理是GPS接收机工作的灵魂,GPS接收机工作都是在微机指令统一协同下进行的,其主要工作步骤为:①、接收机开机后,立即指令各个通道进行自检,适时地在视屏显示窗内展示各自的自检结果,并测定、校正和存储各个通道的时延值。
②、接收机对卫星进行捕捉跟踪后,根据跟踪环路所输出的数据码,解译出GPS 卫星星历。
当同时锁定4颗卫星时,将C/A 码伪距观测值连同星历一起计算出测站的三维位置,并按照预置的位置数据更新率,不断更新(计算)点的坐标。
③、用已测得的点位坐标和GPS 卫星历书,计算所有在轨卫星的升降时间、方位和高度角,并为作业人员提供在视卫星数量及其工作状况,以便选用“健康”的且分布适宜的定位卫星,达到提高点位精度的目的。
④、接收用户输入的信号,如测站名、测站号、天线高和气象参数等 4、 电源GPS 接收机的电源有随机配备的内置电池,一般为锂电池,另一种为外界电源,一般采用汽车电瓶或者随机配备的专用电源适配器。
北斗/GPS车载终端硬件设计方案

北斗/GPS车载终端硬件设计方案介绍一个北斗/GPS车载终端的硬件方案,STM32F103VET6作为主控CPU 完成主要完成车辆行驶过程中的电子显示报站系统。
基于GPRS和GPS/北斗技术的车辆定位调度管理系统可实现视频监控,TTS 智能语音,信号采集,报警等功能。
标签:北斗/GPS;STM32F103VET6;图像处理车辆行车安全性和运营调度的智能化当前是公交行业管理的重要课题,公共汽车行车安全是公共交通客运的生命线,是为乘客提供安全服务的首要保障。
然而,由于公共汽车运行场所的开放性和驾驶员作业的独立性,使得公共汽车的安全行车的管理控制实际上处在事后控制和极具不确定性,急需寻求一种对公共汽车安全行车实时监控警示和对安全行车过程的客观、及时、全面的记录的技术装置和设备,达到提高车辆行车安全,降低安全事故之目的。
我们开发的北斗/GPS 车载终端很好的提供了车辆定位、数据通讯、视频监控、信息显示、连接控制车内其它智能设备等功能。
本终端是提高公共汽车安全行车的有效技术措施,实现运营调度科学化的有效技术手段和先进公共交通系统的重要基础工作。
本文主要是介绍北斗/GPS车载终端的硬件设计及实现的功能,着重介绍BDS/GPS的硬件电路。
一、终端硬件设计北斗/GPS车载终端的硬件方案包括主控部分,电源部分,图像处理,3G/4G 通信,北斗/GPS定位,显示输入部分,数据存储模块,信号采集等部分。
系统电路框图见图1,其中包括了车载终端的主要电路部分。
二、主控部分主控CPU选择内核为ARM32位的Cortex-M3的STM32F103VET6,该微控制器最高72MHz工作频率,512K闪存程序存储器。
它是低功耗微控制器,2.0-3.6V供电,提供80个高速I/O接口,2个DMA控制器,共12个DMA通道,多达8个定时器,支持定时器、ADC、SPI、USB、I2C和UART,2个I2C接口(支持SMBus/PMBus),2个SPI接口(18M位/秒),3個USART接口,CAN 接口(2.0B主动)。
基于STC12C5A60S2单片机GPS信号控制系统设计
基于STC12C5A60S2单片机GPS信号控制系统设计GPS(全球定位系统)是目前最为常用的导航系统之一,可以为用户提供准确的定位和导航服务。
本文将基于STC12C5A60S2单片机设计一个基本的GPS信号控制系统。
一、系统架构系统包括GPS接收模块、单片机主控模块和显示模块三部分。
1.GPS接收模块负责接收来自GPS卫星的导航信号,并通过串行通信将数据传输给单片机主控模块。
2.单片机主控模块负责对接收到的GPS数据进行处理和控制,包括解析经纬度、计算航向角等,并通过串行通信将这些数据传输给显示模块。
3.显示模块可以根据接收到的GPS数据显示当前位置的经纬度、航向角等信息。
二、硬件设计系统的硬件设计主要包括以下几个方面。
1. GPS接收模块选用高灵敏度的GPS接收器,例如u-blox NEO-6M,该模块可以通过串行通信将接收到的导航数据传输给单片机主控模块。
GPS接收模块需要设计合适的天线,并与单片机主控模块进行连接。
2.单片机主控模块选用STC12C5A60S2单片机作为核心芯片,该芯片具有较高的性能和稳定性,可以满足系统的要求。
单片机主控模块需要设计合理的电源电路、串行通信接口和相关的外设接口。
3.显示模块可以选用LCD显示屏,通过串行通信接收来自单片机主控模块的GPS数据,并进行显示。
三、软件设计系统的软件设计主要包括以下几个方面。
1.GPS接收模块的软件设计需要使用合适的驱动程序,可以完成GPS导航数据的接收和解析,并通过串行通信将数据传输给单片机主控模块。
2.单片机主控模块的软件设计需要完成串行通信的初始化和配置,以及对接收到的GPS数据的处理和控制。
具体包括解析经纬度、计算航向角等,并通过串行通信将这些数据传输给显示模块。
3.显示模块的软件设计需要接收来自单片机主控模块的GPS数据,并进行显示。
可以使用合适的显示库完成相关功能。
四、系统功能1.实时定位和导航:接收来自GPS卫星的导航信号,解析经纬度信息,实现实时定位和导航功能。
高动态GPS 12通道半定制相关器芯片研制

高动态GPS 12通道半定制相关器芯片研制
胡辉;方玲;王会芹;张涛;袁超
【期刊名称】《微电子学与计算机》
【年(卷),期】2014(31)2
【摘要】相关器是高动态GPS接收机的关键组成部分.利用FPGA技术,研制了高动态GPS 12通道半定制相关器芯片,阐述了相关器的总体结构设计以及各模块的详细设计.采用模块化设计思想,重点设计了跟踪通道模块、时基发生器模块、寄存器组模块和地址译码模块.各个模块通过VHDL语言在FPGA中实现.实验结果表明:理论分析与实验结果是吻合的,研制的相关器配合TMS320C6713工作稳定,能够满足接收机速度为12km/s、加速度为10g、加加速度为10g/s的高动态指标.
【总页数】7页(P39-45)
【关键词】Global;Positioning;System(GPS);相关器;高动态;并行处理
【作者】胡辉;方玲;王会芹;张涛;袁超
【作者单位】华东交通大学信息工程学院;中国科学院光电研究院
【正文语种】中文
【中图分类】TN402
【相关文献】
1.基于DSP Builder GPS单通道相关器的设计 [J], 张振周;胡辉
2.基于DSP Builder GPS单通道相关器的设计 [J], 张振周;胡辉
3.GPS接收机12通道相关器GP2021的原理与应用 [J], 赵梦;张颖光
4.基于FPGA的12通道GPS数字相关器设计 [J], 滕依良;陈佳品;李振波
5.基于动态双轨逻辑的抗功耗攻击安全芯片半定制设计流程 [J], 童元满;王志英;戴葵;石伟;陆洪毅
因版权原因,仅展示原文概要,查看原文内容请购买。
GPS接收机12通道相关器GP2021的原理与应用

摘要: 该芯片与大多数 #8 位和 "’ $%’(’# 是 ./01234 半导体公司生产的 #’ 通道 5 6 7 码基带相关器, 位微处理器兼容, 可用于 $%& 卫星导航系统的接收机。 文中介绍了 $%’(’# 的主要特点和工作原理, 给出了 $%’(’# 的典型应用。 关键词: $%&; 相关器; 接收机; $%’(’# 分类号: 文献标识码: 9%’’:* ; < 文章编号: ( ’((>) #((8 ! 8=,, (> ! (("# ! ("
# 工作原理
图 & 所示为 56#$#& 的功能原理框图。 56#$#& 相关器中集成有 &# 通道 563 相关器, 它的数字中频 数据来自射频前端,控制功能由微处理器来实现。 相关器内除了 &# 个通道相关器外, 还有一些微处理 器支持功能, 包括双 901: 和实时时钟。 56#$#& 可与 01’ 处理器或其它形式的微处理器进行连接。 #7 & &# 通道相关器 图 # 所 示 为 56#$#& 中 &# 通道相关器的功能 框图。可以看出,它内部 由采样锁存器、时钟产生 器、 时基产生器、 地址译码 器、状态寄存器以及总线 接口等组成。 采样锁存器可将来自 射频前端的同步数据与内 部 30’64=> 时 钟 进 行 同 步。在实模式下,下变频
图 # &# 通道相关器的功能框图
#$% 接收机 &’ 通道相关器 #$’(’& 的原理与应用 器和微处理器之间的数据传输, 该 信号可通过 )**+, -./ 输出进行 检测, 也可通过读取 )**+, %/)0 /+% ) 寄存器进行检测。/-* 是一 个内部信号, 默认值约为 &((12, 用 于同时锁存所有 &’ 个通道的测量 数据(周期计数、码相位、码 3*4 相位、 载波 3*4 相位、 载波周期计 数) , 其周期可以改变。,5)% -./ 是测量中断信号。 /-,5,)67 为时 间标记, 可作为秒脉冲信号。 ’8 ’ 相关器中的跟踪模块 该模块是 &’ 个独立的信号跟 踪模块, 编号 *9( : *9&&。这些功 能模块产生的数据可用于跟踪卫 星信号。 图 " 所示是跟踪模块的原 理框图。 每一个跟踪通道可独立编 程, 并可工作于 +;<=>? (更新) 模式或者 $@?2?> (预设) 模式。其中更新模式是普通模式。预设模式是特别 的工作模式。 由图 " 可以看出,#$’(’& 的跟踪模块中主要包 括载波 3*4、码 3*4 码数控振荡器、载波周期计数 器、 数据源选择器、 载波混频器、 码混 * A ) 码产生器、 频器、 累加与清零、 码相位计数器、 码扫描计数器以 及周期计数器等部分。
12通道振动控制仪的配置与性能指标

12通道振动控制仪的配置与性能指标1. 输入通道:12通道输入2. 输出通道:1通道输出3. 系统配置:3.1 采用PXI总线结构,可靠性高,易扩展,更适用于工业现场;3.2内置PXI嵌入式主控计算机,运行各种功能软件,存储信号数据;3.3采用Q-Linux实时操作系统,实时性强,安全性高,广泛应用在航天、航空领域;3.4每4个通道采用一个高速32位浮点DSP处理器,配合Q-Linux实时操作系统,完美进行信号实时采集、处理分析与控制;3.5支持1000M以太网,适合远程控制与数据传输;3.6峭度控制:采用控制峭度值来生成超高斯随机振动激励信号的方法,可以同时具有频域和幅值域的双域控制均衡能力;3.7在实现振动控制同时,能独立作为分析仪使用,实现更多内容的实时分析。
4. 系统硬件指标4.1信号输入通道:12通道输入,输入阻抗大于220KΩ;4.2通道配置:每个通道单独设置量程(10V、1V、0.1V)、传感器的灵敏度、单端和差分、耦合方式(AC或DC)。
同时应配好与通道相配的传感器和10M/条传感器低噪音线缆;4.3 分辨率:每个通道需24位A/D转换器,每个通道采样频率:96,000samples/sec;4.4 滤波器:必须采用数字式、抗混叠滤波器消除非线性相位变形和混叠≥+160dB/oct;4.5 输入电压范围:±10V;4.6 信号调理:电压输入,内置ICP传感器恒流源;4.7 信噪比:>100dB;4.8 信号输出通道通道数:1通道,1个为控制通道;4.9 分辨率:24位A/D转换器;4.10 动态范围:100dBfs;4.11 输出电压范围:±10V;5. 控制功能5.1随机控制:高斯随机分布信号的PSD控制、采用传递函数均衡方法、基于传递函数更新的自适应控制,能快速响应系统的非线性、共振动点和动载荷的变化;频率范围:0~5,000Hz;分析谱线:分档选择,最高可达3,200谱线;动态范围:>90dB;5.2正弦控制:正弦波形幅值控制、基于正弦信号幅值更新的自适应控制;能快速响应系统的非线性、共振点和动载荷的变化;频率范围:1Hz~5,000Hz;控制动态范围:95dB;分析谱线最大4,096线;5.3正弦加随机:正弦加随机试验参数包含所有随机试验参数;分析谱线:最高达3,200线;频率范围:5,000Hz(最高可扩展到9,375Hz);驱动信号:连续宽带高斯随机加12个模拟的正弦扫描信号;5.4随机加随机:随机加随机试验参数包含所有随机试验参数;分析谱线:最高达3,200线;频率范围:5,000Hz(最高可扩展到9,375Hz);驱动信号:连续宽带高斯随机加12个窄带高斯随机扫描;5.5正弦加随机加随机:正弦加随机加随机试验参数包含所有随机试验参数;分析谱线:最高达3,200线;频率范围:5,000Hz(最高可扩展到9,375Hz);信号数目:多达12个正弦信号,每个正弦信号具有独立的谱图,可用常数或变化的加速度、速度和位移定义;多达12个窄带随机,每个窄带随机具有独立的谱图,以交越点方式定义;5.6典型冲击:脉冲间隔:定义两个脉冲间的时间间隔;低通滤波:可选;用户可设置截止频率;频响函数:从预试验中获取或导入已存储的频响函数;脉冲类型:半正弦、钟形波、矩形波、梯形波、前峰锯齿波、后峰锯齿波、三角波;脉冲宽度:0.5到3,000ms;容差标准:MIL-STD-810(美军标)、ISO标准、用户自定义;5.7冲击响应谱控制:脉冲间隔:定义两个脉冲间的时间间隔;频响函数:从预试验中获取或导入已存储的频响函数;采样频率:最高48,000Hz;波形补偿:去直流、高通滤波;使时域波形终端的加速度、速度、位移为零;5.8谐振搜索与驻留:谐振搜索准则:基于Q值、任一对输入通道间或输入通道和控制通道间的传递特性函数幅值比的谐振识别,或两者并用;试验模式:边谐振搜索边驻留;完成谐振搜索后,再根据驻留列表驻留,这种模式允许用户修改驻留列表;驻留方式:频率锁定驻留、谐振跟踪驻留;5.9路谱仿真:数据来源:由波形编辑器生成的路谱文件(.cps);数据调整:与比例系数相乘来调整波形的幅值和极性;均衡方法:用低量级随机信号均衡传递函数;频响函数:从预试验中获取或导入已存储的频响函数;谱图计算:自动计算各段交越频率值、自动检查所定义交越点的有效性、自动计算目标加速度有效值、速度峰值、位移峰峰值,有效值可调整;5.10瞬态冲击:脉冲间隔:定义两个脉冲间的时间间隔;低通滤波:可选;用户可设置截止频率;频响函数:从预试验中获取或导入已存储的频响函数;目标波形:正弦、哨叫、白噪声或其他实测数据;6. 辅助控制功能:6.1峭度控制功能:通过控制峭度值来生成超高斯随机振动激励信号的方法,从而使现有的数字式随机振动控制系统可以同时具有频域和幅值域的双域控制均衡能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
十二通道GPS 信号发生器的硬件设计*陆 娟 常 青 张其善 张 军(北京航空航天大学电子工程系 北京 100083) *国家自然科学基金资助项目(批准号:60027001)收稿日期:2002-07-30 收修改稿日期:2003-01-24文 摘 分析十二通道G PS 信号发生器的系统结构,提出由计算机完成信号处理、PCI 板卡完成信号调制的设计形式,并详细介绍PCI 板卡上DSP 和FP GA 的具体设计方法和各器件的选择考虑,分析N CO 主要参数的计算方法以及数字量化带来的系统误差。
主题词 信号发生器 数字调制 G PS DSP FPG A前 言高速运动的载体飞行的速度和加速度都很大,特别是多级火箭级间分离时,会产生很大的冲击,GPS(Global Positioning Sy stem)[1]接收机在这种高动态环境中必须尽快捕获GPS 卫星,并能稳定跟踪卫星信号。
在测试阶段,这种复杂的高动态环境下的GPS 信号,需要借助卫星信号发生器才能模拟。
高动态GPS 信号发生器将根据导弹弹道、卫星轨道,调整发生器伪码时钟和载频多卜勒频率,产生高动态GPS 卫星信号,从而检验接收机的捕获跟踪能力。
目前,由国家自然科学基金支持的高动态GPS 信号发生器的研制是一项填补国内空白的重点研究项目,它的研制可为GPS 接收机特别是高动态GPS 接收机的研制开发及测试提供仿真环境,同时也可用于系统级GPS 仿真试验,为最终确定GPS 测量方案提供依据,有着重要的研制价值。
本文将在文献[2]所分析的系统模型的基础上,进一步具体提出十二通道GPS 信号发生器的硬件实现方法。
1 GPS 信号发生器的系统结构十二通道GPS 信号发生器由信号处理和二级调制(扩频和BPSK)两部分组成,其硬件实现结构示于图1。
为方便人机交互和满足实时高速处理的需要,信号处理部分由计算机来实现。
计算机根据用户的需要定义移动GPS 接收机的工作环境,生成导航电文,实时计算出各种所需参数,控制调制部分产生用户所需的GPS 信号,并将模拟器存储的数据与GPS 接收机返回的数据进行处理比较,最后以图表和数据文件的形式提供分析结果。
为了与计算机进行实时大量的数据交换,调制部分由一块PCI 板卡实现。
PCI 板卡包括接口模块、数字调制模块和射频模块三个组成部分。
计算机实时将计算出的参数及导航电文通过PCI 接口控制芯片送入板卡上的缓冲区(双口RAM )中;DSP (数字信号处理芯片)将这些数据从缓存区读出,从外存储器(FLASH )中查出相应的C /A 码并与导航电文进行扩频调制;码速率及码相位的控制、数字载波调制、十二通道信号合成及内插在FPGA (大规模在线可编程器件)中完成;内插后的信号经过D /A 转换、滤波后得到十二通道的合成中频模拟信号;该信号经过上变频、滤波及增益控制后变为载频为1575.42M Hz 的射频信号。
2 PCI 板卡的设计·15·2003年5月遥 测 遥 控DOI:10.13435/ k i .ttc.0016552.1 PCI 接口模块的设计近年来,随着PCI 板卡的广泛应用,已有越来越多的PCI 接口专用控制芯片可供选用。
本设计选择的是QU ICKLO GIC 公司的Q L5032。
该芯片除了具备出色的PCI 接口控制功能之外,还内嵌390个可编程逻辑单元和16128位双口RAM,并可进行IO 编程,因此可以方便地与DSP 直接连接,而不需要额外的控制逻辑和缓冲芯片,为板卡的硬件设计节省了空间。
2.2 DSP 的设计DSP 接收到计算机产生的中断之后,从双口RAM 中读出下一个更新时刻t 的各种参数及导航电文D i (t )。
然后,根据可观测到的卫星序号i 和码相位hCi (t ),查找存放于FLASH 中的地址码表,得到第i 颗卫星的地址码C /A i (t ),并与导航电文D i (t )异或以完成扩频调制。
调制后的扩频码C /A i (t ) D i (t )被送入FPGA 中相应通道的码移位寄存器,码元初始相位h coi (t )、码速率R i (t)、载波频率f i (t )、载波初始相位h w 01(t )和增益A i (t )也分别被DSP 转换为控制字写入FPGA 中相应的寄存器中,从而实现DSP 对FPG A 的控制功能。
DSP 芯片选用TI 公司的浮点处理器TM S 320V C 33[3],处理速度最高为75M IPS ,1.1Mbit 片内RAM 可支持DM A 功能,可满足系统设计的需要。
2.3 FPGA 的设计2.3.1 FPGA 的结构组成如图2所示,FPGA 实现了数字载波调制及四倍零内插的功能,其中包括时基电路、码NCO 、增益控制、载波N CO 、BPSK 调制器和内插器等。
其中的参数下标i k 表示第k 通道所模拟的卫星序号i。
由图2可见,扩频码由DSP 送入FPGA 中的码移位寄存器,码NCO 在码元相位和码速率寄存器的控制下,为码移位寄存器提供所需频率和相位的时钟,从而驱动码移位寄存器产生相应码相位及码速率的扩频调制码。
载波NCO 在载波相位和载波频率控制字的控制下,产生所需频率及相位的正弦波,与扩频调制码相乘,完成载波调制。
十二通道的数字调制信号合成之后,经过四倍零内插,送入到D /A 转换器转换成模拟信号,再经带通滤波后,即可以得到35.42M Hz 的中频信号。
FPGA 为Xilinx 公司Virtex II 系列芯片的XC2V 250[4],芯片内部系统门数为250000,存储器为432Kb ,能满足大量数值表的存储要求。
与ALT ERA 公司的APEX 20K 系列芯片相比,X C 2V 250最大的优点是拥有24个18bit ×18bit 的片内硬件乘法器,因此大大减少竞争冒险的发生,缩短了乘法延时,非常适合调制电路。
D /A 转换器可以选择ADI 公司的AD976x 系列的14位Tx 数模转换器AD9764,它具有125M Hz 的转换速率和良好的动态特性,适用于通讯电路。
带通滤波器选择五阶椭圆声表面波滤波器,可以满足系统设计的需求。
2.3.2 FPGA 中时基电路的设计 如图3所示,时基电路实现对整个系统的时间控制。
系统采样率为20M Hz ,该频率由80M Hz 的频率源四分频得到。
同时,80M Hz 频率源还为内插和D /A 转换提供时钟。
由于频率源直接影响到载波频率和码速率的精度,因此要求该频率源的精度及稳定度等指标尽可能高。
一般80M Hz的频率源内部均是通过倍频而得到的,因此稳定性相对较差。
为解决这个问题,系统采用一个10M Hz 的高精度晶振O CCO(Ov en Contro lled Crystal Oscillator),通过锁相环8倍频得到80M Hz 的频率。
OCCO 的精度可达5×10-9,稳定度可达±1×10-10/s ±1×10-10/day 。
2.3.3 FPGA 中N CO 的设计及参数计算·16·十二通道GPS 信号发生器的硬件设计第24卷第3期码N CO 和载波N CO 采用直接数字频率合成(DDS )的方法实现。
该方法建立了一个相位-幅度数据表,根据每个采样时刻信号的相位查表得到其对应的幅度值以产生所需信号,通过改变每相邻两个采样时刻波形相位的变化率来控制所需信号的频率。
载波NCO 的原理示于图4。
由图4可知,载波相位hw (n )是由载波相位增量△h w (n )累加所得,在采样率保持不变的情况下,△h w (n )越大,载波相位增加速度越快,载波频率也就越高。
加法器的位数决定了频率的精确度,而相位-幅度表的地址位数决定了相位的精确度,相位-幅度表的数据位数决定了幅度的精确度。
每个通道需要有一个正弦余弦数据表,该数据表的大小取决于FPGA 片内RAM 的大小,根据XC2V250的具体条件并对数据表的存储进行优化,数据表的地址位可选取为13位,数据位选取为16位。
下面将具体介绍各参数的计算方法,并对误差进行简单分析。
用数字方法实现频率控制,需用二进制来表示相位。
设单位相位增量为2π/2m ,量化数字相位增量(即频率控制字)为△h w (n ),则实际相位增量△h w 为:△h w =△h w (n ) 2c 2m (rad)(1)设所需载波的频率为f ,周期为T =1/f ,采样周期为T clk ,采样频率为f clk ,则有2c =T T clk △h w (2)即f =f clk△h w 2c (3)将式(1)代入式(3)可得:f =f clk △h w (n )2m (4)若f 的精度要求不大于0.005Hz ,△φw (n )的最小增量为1,采样率f clk =20M Hz ,根据式(4)有2m ×0.00520×106≥1(5)解得m ≥31.89,取m =32。
此时△h w (n )的计算表达式为△h w (n )=232×f 20×106(6)式中[ ]为取整运算。
设载波初始相位为h wo ,则量化的初始相位(即初始相位控制字)h wo (n )的计算表达为h w 0(n )=h w 0 2322c (7)△h w (n )的最小增量为1,由式(4)可求得f 的误差为X f =20×106232=0.0047 (Hz)载波的相位误差取决于相位-幅度表的数据位数,该表的数据位为13位,则载波的相位误差为Xh =2c 213=7.67×10-4(rad) 码N CO 的原理及参数的计算方法与载波N CO 的基本相同,只是码N CO 中无需查找幅度表,而是将码元相位h c (n )与231进行比较,当h c (n )<231时,N CO 输出高电平,当h c (n )>231时输出低电平,以此作为码移位寄存器移位时钟。
2.4 模拟及射频部分的设计考虑为了保证混频输出信号具有比较小的失真以及具有良好的滤波特性,变频器分作成两级结构,其中第一级由35.42M Hz 变为175.42M Hz,第二级由175.42M Hz 变为1575.42M Hz 。
对于输出的高频信号,因用于GPS 系统,其精确度要求比较高,所以对于本振频率的精度要求也较高。
可以利用数字信号处理部分的基准时钟,同时,采用·17·2003年5月遥 测 遥 控“锁相倍频电路”来实现所需要的本振信号。
因为RF 端口输出的信号电平很小(地面接收机接收到的GPS 信号一般为-160dBw ),所以需要在输出端口加上衰减器/限幅器。