无人机舵机控制系统的硬件设计与实现_杨百平
无人机舵机自动测试系统硬件平台设计
虚拟仪器与网络技术的结合,使测试系统具有 网络化的特点,结合本地局域网或广域网,可方便
实现远程诊断功能,提高系统的可维护性。
4 结论
在实际运行中,舵机系统性能综合自动测试硬 件设备工作稳定,性能良好。测试系统界面友好, 功能完备、可靠性高、可维护性强等优点,是舵机 测试的一种新手段,也为研制新型舵机产品提供了 技术支持。
第28卷第1期 2009年1月
兵工l动化 Ordnance Industry Automation
V01.28.No.1 Jan.2009
文章编号:1006-1576(2009)0l一0062-03
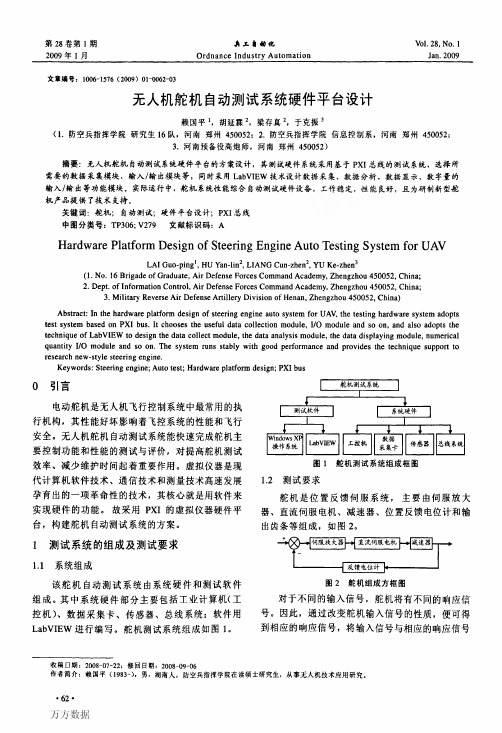
无人机舵机自动测试系统硬件平台设计
赖I¥I-平1,胡延霖2,梁存真2于克振3 (1.防空兵指挥学院研究生16队,河南郑州450052;2.防空兵指挥学院信息控制系,河南郑州450052;
3.Military Reverse Air Defense Artillery Division of Henan.Zhengzhou 450052.China)
Abstract:In the hardware platform design of steering engine auto system for UAV,the testing hardware system adopts test system based on PXI bus.It chooses the useful data collection module,I/O module and SO on,and also adopts the technique of LabVIEW tO design the data collect module,the data analysis module,the data displaying module,numerical quantity I/0 module and SO on.The system runs stably with good performance and provides the technique support to research new—style steering engine.
智能化无人机飞行控制系统设计与实现

智能化无人机飞行控制系统设计与实现随着科技的发展,无人机技术正在得到广泛的发展与应用。
随着无人机的不断普及,其应用范围也日益扩大,从消费级娱乐无人机到军事冲突、灾难救援等领域都可以看到无人机的身影。
而一台高性能的智能化无人机飞行控制系统对于无人机飞行的安全和稳定至关重要。
一、无人机飞行控制系统的基础无人机飞行控制系统是实现无人机飞行功能的核心技术。
它可以通过对无人机各项数据的采集、分析和控制,实现无人机在空中飞行路径的规划、稳定、预测和纠正等。
无人机飞行控制系统是由传感器、中央处理器、控制电路、数据记录设备、供电系统等硬件部件以及控制程序、飞行状态算法等软件部件组成。
无人机飞行控制系统是一个高度复杂的系统,需要各个硬件部件之间的紧密配合和软件部分算法的精确计算才能保证控制系统的高效稳定性和安全性。
二、智能化无人机飞行控制系统的特点智能化无人机飞行控制系统最基本的特点就是其搭载了强大的智能化底层算法,这些底层算法可以通过无人机传感器获取相关的飞行数据,并进行实时计算和处理,进而通过飞控器控制电路输出制导指令,对无人机飞行轨迹进行动态控制和调整。
智能化无人机飞行控制系统还具有强大的辨识能力和预测能力,可以在预测飞行状态的同时,对可能出现的异常或风险进行快速识别和处理,大大提高无人机的安全性和稳定性。
三、智能化无人机飞行控制系统的设计和实现在设计和实现智能化无人机飞行控制系统时,需要考虑到各个硬件部分之间的协调和应用,同时还需要对软件算法进行精确的编写和调试。
因此,智能化无人机飞行控制系统的设计和实现需要具有高度专业化的技术能力和丰富的工程实践经验。
下面我们来具体探究一下智能化无人机飞行控制系统的设计和实现。
1. 硬件部分的加强无人机飞行控制系统的各项硬件都需要具有高精度、高效率、高可靠性和稳定性等特性。
在设计和实现智能化无人机飞行控制系统时,需要对飞行控制板及附件、传感器、电机、电调等硬件部分进行加强和优化。
无人机控制系统设计与仿真
无人机控制系统设计与仿真无人机(Unmanned aerial vehicle, UAV)作为一种自主飞行的飞行器,在日常生活和工业领域中被广泛应用。
为了确保无人机的安全飞行和高效任务执行,优秀的无人机控制系统设计与仿真是非常重要的。
一、无人机控制系统设计无人机控制系统的设计主要包括飞行控制系统和通信控制系统两个方面。
1. 飞行控制系统设计:无人机飞行控制系统是确保飞行器平稳飞行、包括航向、高度和速度控制在内的关键。
设计一个稳定可靠的飞行控制系统需要以下步骤:a) 确定飞行器的动力学模型:通过数学建模,从物理角度描述无人机的运动特性。
b) 设计控制器:基于动力学模型,选择适当的控制器类型(如PID控制器、模糊控制器或模型预测控制器),设计控制器的参数,并利用控制理论方法进行系统稳定性分析。
c) 构建控制系统:根据控制器设计结果,建立整个飞行控制系统,包括传感器、执行器、控制算法等元素的组合,将信号传递和处理流程定义清楚。
2. 通信控制系统设计:无人机通信控制系统是实现与地面控制站之间的通信和数据传输的关键。
设计一个可靠的通信控制系统需要以下步骤:a) 确定通信协议:根据任务需求和无人机特性,选择适当的通信协议(如Wi-Fi、蓝牙或Zigbee),考虑到通信距离和数据传输速率等因素。
b) 设计通信模块:根据通信协议,设计通信模块的硬件和软件,包括天线、无线模块和数据传输协议等元素。
c) 构建通信系统:根据通信模块设计结果,建立整个通信系统,包括无人机上的通信模块和地面控制站上的通信模块。
二、无人机控制系统仿真无人机控制系统的仿真是在计算机环境中模拟和评估无人机飞行控制的有效方法。
通过仿真可以降低测试和调试的成本,并提前评估控制系统的性能。
1. 仿真平台选择:选择合适的仿真平台是进行无人机控制系统仿真的第一步。
常用的无人机仿真平台包括MATLAB/Simulink、dronekit和PX4等。
2. 建立仿真模型:根据实际无人机的动力学模型和控制系统设计结果,利用选择的仿真平台建立无人机的仿真模型。
无人机舵机控制系统的硬件设计与实现
舵 机控 制 器、 多个传 感 器和 必要 的机 械 支撑 机构 组 成 的一套 自动
控 制 系统。作 为 飞行控 制 中心和 舵 机之 间的信 息连 接桥 梁,它 能 够 通过 人 工在 线编 程 ,实现对 无 人 飞行 器多级 的伺 服控 制 ,具有 制 作 成 本 低 、 性 能 高 、 安 全 稳 定 等 优 点。文章 首 先对 无人 机舵 机 控 制 系统 进行 了简单概 述 ,随后 对 控制 系统 中各 个部 分 的硬件 组 成 进行 了详 细介 绍,最后 通 过 系 统 的软 件设 计 ,对 其 功 能的 实现
现对 电子开关 的动作控制 ,从 而确保 了整个舵 各个功 能模块独立 ,这样有利于系统软件的修
机系统 电机转动 的稳定性 。与传统 的直流 电机 相 比,大大降低 了舵机 C P U的功率损耗 。
2 . 3功 率 驱 动
单 片机 ,并运行相应的控制程序;单片机将程 序指令 以二进制 信号形式发送给上位机,上位 机将 电信号转化为一舵偏角指令,经过单片机
的 各个 数 据 串 口,传 送 到 舵 机 的 调 节 单 元 。 其
改与调试 。舵机控制系统的软件主要包括 以下 几 个功 能模块 : 数据采集和通 信模 块、控 制算
法 模块、P WM 产生模块 以及 各种管理 监测模
块 。其 中,数据通信 模块主要 涉及 CA N 总线
次,调 节单元将接受到 的偏 角指令与 P WM 进 行对 比,将对 比结果定义为 A;随后调节单元 测 量舵 机实 际 转速 ,当转 速大 于系 统设 定值 时 ,将超 出量定义为 B;最后检测整 个系统的 实际电流 ,所得结果输 出给 P WM,定义为 C。
3 系统软件设计
小型无人机飞行控制系统的硬件设计与实现
中图法分 类号 : P 9 . T 31 8
文献标 识码 : A
文章 编号 :0 072 (o 0 1—190 10.0 4 2 1) 02 5.4
Ab t a t T a iet e mi it rz t n a d f rcv l s , t eh r wa e d sg n a ia in o UAV i h o t l y tm a e n s r c : or l n a u ai n i i u e h a d r e in a dr l t f e z h i o o e z o a l f g t n r se b s do c o s
传感 器; 过详 细的结构框 图描 述如何 有效 的将各传 感 器组成 一个稳 定 的系统。该 系统 已经通过 了改装 的航模 直升机 的实 通
验 验证 , 实验结 果表 明 了其 可行性和 可 靠性 。该 系统 实现体 积小 , 以装在 一个 小盒子 里 , 可 所有接 口单独 引出, 以挂载到 可
n ei it t o g e r n d l r a e h e l t S malh ttcnb tnoas l o , d c dal efc a dr l bl r u hrt igamo e i ln . T eraiaini Os lt a a e u t lb x e u e lteitra e a i h y i ap z o s i p i ma n h n u t i rn rir.F rh r r,t i y t i l p we, o c sa x a d bl a dmo n ndfee t ares u temoe hss s m w o r lw o t de p n a it, S utdfr s r d cin o c e so n i y Oii s i s o u t ts e o ma p o
工业无人机控制系统设计与实现

工业无人机控制系统设计与实现随着科技的发展与工业的进步,无人机在工业领域中的应用也愈发广泛。
工业无人机拥有诸多优势,如高度灵活性、高效性和安全性。
其中,工业无人机控制系统是实现其各种功能和目标的核心。
本文将探讨工业无人机控制系统的设计与实现。
工业无人机控制系统的设计首先需要确定其基本架构。
一个典型的工业无人机控制系统包括硬件和软件两个部分。
硬件部分主要包括无人机飞行控制器、传感器和执行器等组件。
飞行控制器是工业无人机的大脑,负责接收来自传感器的数据并做出相应的飞行决策。
传感器主要用于感知无人机周围的环境,如气压传感器、加速度计、陀螺仪等。
执行器则负责通过控制无人机的舵面、飞行电机等部件来实现飞行。
软件部分则包含飞行控制算法、通信协议和任务规划等实现。
飞行控制算法是决定无人机飞行行为的核心部分,它需要根据传感器数据实时地计算出控制命令并将其发送给执行器。
通信协议则是无人机与地面站或其他设备之间进行通信的桥梁,确保数据的传输可靠性和实时性。
任务规划算法则负责根据预定任务目标和约束,在保证无人机安全的前提下规划无人机的飞行路线。
在工业无人机控制系统的实现过程中,还需要考虑一些关键技术。
首先是姿态估计技术。
姿态估计通过传感器获取无人机的姿态信息,包括滚转角、俯仰角和偏航角等,以帮助飞行控制器正确判断无人机的状态。
其次是路径规划和避障技术。
工业无人机通常需要在复杂的工业环境中飞行,路径规划和避障技术可以确保其安全性和可靠性。
最后是故障检测和容错技术。
由于工业无人机承担的任务多种多样,故障检测和容错技术能够增加其鲁棒性和可靠性,提高不受控制因素影响时的应对能力。
在工业无人机控制系统设计与实现过程中,还需要优化性能和解决实际问题。
工业无人机的控制系统设计应充分考虑系统的可扩展性和模块化,以适应不同工业应用场景的需求。
此外,对于工业无人机的飞行控制算法和路径规划算法等关键技术,需要通过理论研究和大量实验来不断优化和改进,以提高无人机的飞行稳定性和操作性。
无人机控制系统的硬件设计与实现方法

无人机控制系统的硬件设计与实现方法随着科技的迅速发展,无人机在军事、航拍、农业等领域得到了广泛的应用。
而无人机的控制系统是保障其正常运行和稳定飞行的重要组成部分。
本文将从硬件设计和实现方法两个方面介绍无人机控制系统的要点和注意事项。
一、硬件设计1. 飞控器飞控器是无人机的大脑,负责接收和处理传感器数据,并控制无人机的飞行。
设计飞控器时,应考虑以下几个方面:a. 处理器选择:选择速度快、功耗低的处理器,以满足无人机快速、准确的数据处理需求。
b. 传感器接口:飞控器需要接收来自加速度计、陀螺仪、磁力计等传感器的数据,因此需要设计相应的传感器接口。
c. 通信模块:飞控器需要与地面站或其他设备进行通信,因此应设计有可靠的通信模块,如无线射频模块或蓝牙模块。
d. 快速响应能力:飞控器需要快速响应无人机的操作指令,因此应设计能够在短时间内进行数据处理和计算的硬件架构。
2. 传感器传感器是无人机控制系统的重要组成部分,能够提供关键的飞行数据。
常见的传感器包括加速度计、陀螺仪、磁力计、气压计等。
设计传感器时应注意以下几点:a. 稳定性:传感器的输出应具有良好的稳定性,能够准确反映无人机的飞行状态。
b. 精度:传感器的测量数据需要具备较高的精度,以提供准确的飞行控制参数。
c. 抗干扰能力:无人机在飞行过程中会受到各种外部干扰,因此传感器应具备一定的抗干扰能力,以减少误差。
d. 轻量化设计:传感器要尽可能轻巧小型,以减轻无人机的负载和提高飞行性能。
3. 电源系统电源系统是无人机控制系统的能量来源,好的电源系统能够提供稳定、可靠的电源供应。
设计电源系统时应注意以下几个方面:a. 电池选择:选择适合的电池类型和电压,以满足无人机的功耗需求。
b. 电源管理:设计合理的电源管理电路,以实现正常的充电和放电控制。
c. 电源保护:设计相应的电源保护电路,以防止电池过放、过充、短路等问题。
d. 效率优化:优化电源系统的效率,以延长无人机的飞行时间。
无人机舵机控制系统的硬件设计与实现
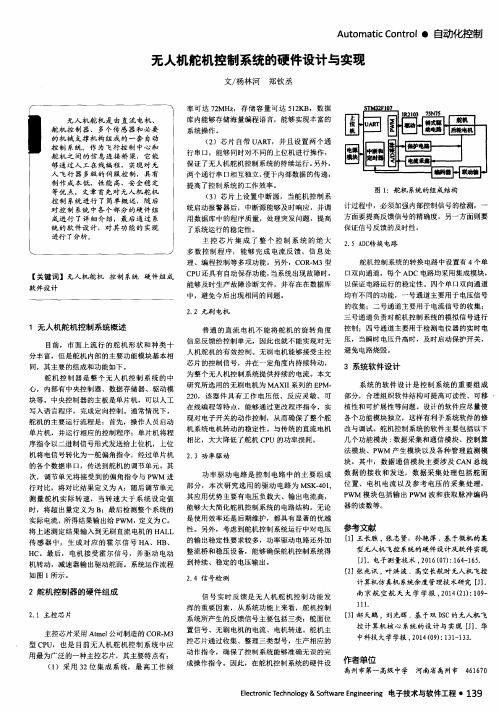
无人机舵机控制系统的硬件设计与实现作者:杨林河郑钦丞来源:《电子技术与软件工程》2016年第24期无人机舵机是由直流电机、舵机控制器、多个传感器和必要的机械支撑机构组成的一套自动控制系统。
作为飞行控制中心和舵机之间的信息连接桥梁,它能够通过人工在线编程,实现对无人飞行器多级的伺服控制,具有制作成本低、性能高、安全稳定等优点。
文章首先对无人机舵机控制系统进行了简单概述,随后对控制系统中各个部分的硬件组成进行了详细介绍,最后通过系统的软件设计,对其功能的实现进行了分析。
【关键词】无人机舵机控制系统硬件组成软件设计1 无人机舵机控制系统概述目前,市面上流行的舵机形状和种类十分丰富,但是舵机内部的主要功能模块基本相同,其主要的组成和功能如下。
舵机控制器是整个无人机控制系统的中心,内部有中央控制器、数据存储器、驱动模块等。
中央控制器的主板是单片机,可以人工写入语言程序,完成定向控制。
通常情况下,舵机的主要运行流程是:首先,操作人员启动单片机,并运行相应的控制程序;单片机将程序指令以二进制信号形式发送给上位机,上位机将电信号转化为一舵偏角指令,经过单片机的各个数据串口,传送到舵机的调节单元。
其次,调节单元将接受到的偏角指令与PWM进行对比,将对比结果定义为A;随后调节单元测量舵机实际转速,当转速大于系统设定值时,将超出量定义为B;最后检测整个系统的实际电流,所得结果输出给PWM,定义为C。
将上述测定结果输入到无刷直流电机的HALL传感器中,生成对应的霍尔信号HA、HB、HC。
最后,电机接受霍尔信号,并驱动电动机转动,减速器输出驱动舵面。
系统运作流程如图1所示。
2 舵机控制器的硬件组成2.1 主控芯片主控芯片采用Atmel公司制造的COR-M3型CPU,也是目前无人机舵机控制系统中应用最为广泛的一种主控芯片,其主要特点有:(1)采用32位集成系统,最高工作频率可达72MHz,存储容量可达512KB,数据库内能够存储海量编程语言,能够实现丰富的系统操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1076计算机测量与控制.2010.18(5) Computer Measurement &Control控制技术收稿日期:2009-09-27; 修回日期:2009-11-09。
作者简介:杨百平(1982-),男,陕西人,在读研究生,主要从事电路系统与自动控制方向的研究。
杨金孝(1964-),男,陕西人,副教授,主要从事电子电路的研究与设计、控制理论与控制工程方向的研究。
文章编号:1671-4598(2010)05-1076-03 中图分类号:T P274 5文献标识码:A无人机舵机控制系统的硬件设计与实现杨百平,杨金孝,赵 强(西北工业大学电子信息学院,陕西西安 710129)摘要:给出了一种基于ST M 32F103VB 微控制器的无人机全数字舵机控制系统硬件实现方案,该方案以STM 32F103VB 作为主控芯片,无刷直流电机作为该系统的伺服电机,采用三闭环的控制策略,实现了脉宽调制(PWM )控制信号的采样和输出,通过采样PW M 信号实现舵机的控制,针对无人机对数据传输实时性的要求,利用CAN 总线与上位机通讯,很好地满足了要求;该系统具有成本低廉、安全可靠且实现容易的特点,实现了舵机控制系统的数字化与小型化;经多次试验,证明是安全实用的。
关键词:S TM 32F103VB 微控制器;无人机;伺服;电动舵机Hardware Design and Implementation for a S ervo System of UAV RudderYang Baiping ,Yang Jinxiao,Zhao Qiang(Colleg e of Electr onics and Infor mat ion,No rthw ester n P olytechnical U niver sity,Xi an 710129,China)Abstract:A set of fu lly-digital-signal ser vo system bas ed on S TM 32F103VB for UAV electrom echanical rudder is in tr odu ced in th is paper.It takes S TM 32F103VB as the master control unit and bru shless DC m otor as its drive.T his project uses the digital th ree clos ed-loop control strategy,sampled and gen erated puls e width modulation w ave,through sampling one of th e PW M w aves to realize control tran sfer,in view of U AV to data transmis sion tim elin es s r equest,com municated w ith upper sys tem by CAN bu s.It featu red low cos t,s afe,easy to realize,made it smaller and digital,and w as testified that the sy stem is ap plicable and safety.Key words :S TM 32F103VB M CU;UAV;servo;electr om ech anical rudder0 引言舵机控制系统是飞行控制计算机和舵机之间的接口,它采集接收机多路PW M 信号,与上位机进行通讯,产生控制舵机的PW M 信号,是舵机系统的核心部分。
现有的舵机伺服控制线路大部分还都是模拟的,因其固有的一些缺点而限制了它的使用,相比之下,数字舵机系统具有很多模拟式舵机所没有的优点。
本文给出了一种基于ST M 32F103VB 微控制器的无人飞行器舵机伺服控制系统,具有高性能、低功耗、低成本、安全可靠和实现容易的特点,可在线编程并成功应用于实践。
1 系统综述舵机主要是由无刷电机、舵机控制器、舵机机械结构和传感器4部分组成。
其中舵机控制器又包括:数据接口部分、中央控制单元、逻辑单元、隔离放大部分与功率驱动模块。
一般舵机的工作过程如下:首先由上位机给出一舵偏角指令,舵机控制器接受该指令后与检测得到的实际舵面偏转角送入舵面位置调节单元从而得到参考P WM 占空比A;然后测量实际转速,当速度大于预设值时输出一给定PW M 占空比B;最后检测实际电流,当电流大于电流预设值时,输出另一给定的PWM 占空比C [1]。
无刷直流电机中的H A LL 传感器检测转子位置,产生H A ,H B,H C 三相霍尔信号,H A 、HB、H C 、和ST M 32输出的P WM 波和电机换相信号逻辑综合得到6路电机控制信号驱动电机转动[2]。
电机输出轴连接精密减速器和各种传感器,减速器输出驱动舵面。
系统实现图如图1所示。
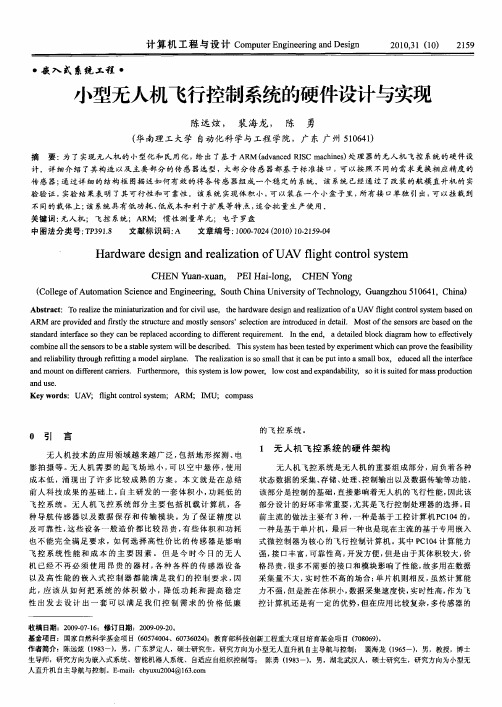
图1 系统组成结构图2 舵机控制器的硬件组成舵机控制器的硬件由图2中框线部分组成,该控制器以ST M 32F103V B 为核心。
整个系统的硬件设计主要由ST M 32F103V B 工作电路、可编程逻辑电路、隔离及驱动电路、检测信号处理电路、A D 转换电路、数据接口电路及温度检测电路等部分组成。
在系统中ST M 32F103V B 通过其自身的CA N 总线控制器与上位机进行数据传输,并使用自身集成的A D 转换器和内置通用定时器实时监测舵机位置、转速和电流等参数。
控制器根据内置的控制算法进行位置环、速度环和电流环计算,并产生控制数据,控制数据通过转换算法产生控制量(PW M 信号和DI R 信号),控制量进入逻辑阵列CPL D 与无刷电机位置传感器信号(H A L L 信号)进行逻辑综合后,输出6路电机控制信号。
电机控制信号经隔离电路后控制电机功率驱动模块进行功率放大,驱动无刷电机运行。
2 1 主控芯片STM32F 103VB [3]ST M 32F103VB 是意法半导体(ST )公司推出的基于A RM 32位CORT EX -M 3CPU ,是目前性能比较突出的微处理器之一,其增强型系列特别适合做电机控制。
它的主要特点如下:第3期杨百平,等:无人机舵机控制系统的硬件设计与实现1077图2 舵机控制系统硬件组成图(1)内核。
基于ARM 的32位CO RT EX -M 3的M CU 最高工作频率72M H z,1 25DM I PS/M H z;(2)片上集成了128kB 的Flash 存储器,20kB 的SRA M 存储器,方便自启动,无需外部扩展,从而大大减少了控制系统的尺寸;(3)内带U A RT 、SPI,以及增强型CA N 总线结口,方便与不同上位机协议通信的硬件设计,本系统将采集好的数据通过CAN 上传给上位机;(4)内含丰富的中断源,能够及时处理各种突发事件,提高了系统的可靠性;(5)一个高级控制定时器,带死区产生,用来产生6路PWM 输出;3个通用定时器,可配置为不同的模式,检测电机的速度和位置;(6)双ADC 结构允许双通道采样/保持,以实现12位精度,1 s 的转化。
此双ADC 结构为2个工作在非连续模式的独立的时序控制,具有多个触发源,并且每个通道的采样时间可编程。
ST M 32F103VB 为整个控制系统的核心,它主要担负了电流反馈、位置反馈以及位置给定的采样和控制算法的实现,电机控制信号的产生以及各种监控功能等任务。
在ST M 32F103VB 中,将高级控制定时器配置为P WM 模式,通过改变高级控制定时器的T IM 1_A RR 寄存器和T IM _CCRX 寄存器的值,变换PW M 方波信号的周期和占空比。
当故障发生时ST M 32通过软件及时关闭PW M 的输出直至故障消失。
2 2 无刷电机换向电路设计通过检测无刷电机转子位置信号来决定逆变桥的通断情况,转子的位置信息由安装在定子上的霍尔组件输出的H A 、HB 和H C 三相信号获得,H A 、H B 、H C 和电机运行方向信号按照特定的逻辑组合,决定电机三相绕组的导通顺序。
本课题采用一片可编程逻辑器件A LT ER A 的M A XII 系列的EPM 240,该器件具有功耗低、简单易用及在线可编程等特点,在其中编程实现电子开关和切换控制电路,使得ST M 32只用一路占空比可调的PW M 波就能控制电机的转速,这样大大节省了CPU 的开销,使得ST M 32将更多的时间分配在系统控制算法的开销上,提高了控制的精度[4]。
输入信号为电机定子输出的三相霍尔信号和ST M 32输出的载波信号PWM 及电机运行方向信号DIR 经过逻辑运算产生换向信号P WM 1~PWM 6,从而正确地控制功率场效应管的导通次序。
为了消除输出信号产生的毛刺,在输出到舵机的端口加入一个470 电阻和47pF 电容组成的滤波电路。
2 3 功率驱动电路的设计功率驱动电路是舵机控制器内重要的部分,为了使舵机控制系统小型化,并具有良好的散热功能,选用了M SK 公司的M SK 4401,它内置6个N 沟道的M OSF ET ,100kHz,死区时间可调,最大供电电压75V,最大持续输出电流29A,峰值电流达41A 。
它的优点是可以使驱动电路的设计大为简化,可实现对M OSF ET 的最优驱动,又具有快速完整的保护功能,且模块体积小,封装形式易于散热。
其电路如图3所示。
图3 隔离与功率驱动电路2 4 信号检测电路的设计舵面实际的位置信号、无刷电机的电流、以及电机的转速是舵机三环控制系统中重要的反馈量,这3个信号的值将直接影响控制系统的精度。
如果这些反馈值采集效果不理想,将粗糙的数据引入舵机控制器,然后试图通过复杂的控制算法来提高控制精度,将收不到好的效果。
因此提高这些反馈量的检测精度,成为整个舵机控制器硬件设计的关键部分。
信号检测电路包括舵面位置的检测、电流信号检测以及增量式编码器电路。
[5]光电编码器是一种采用光电技术将轴的机械转角转换成数字信号输出的数字式传感器,利用它可以很方便实现角度和转速测量并且测量的精度高,本系统采用H EDL L 55。
与电机配合使用的光电编码器是差分输出的,所以在电路中需要使用一个差分接收芯片,选用SN65L BC173。
光电编码器格数为500格,4倍频后为2000,即电机每转1圈计数器变化2000。
本系统将ST M 32F103VB 的一个通用定时器配置为编码器接口模式,用以检测电机的转速和舵机的位置。