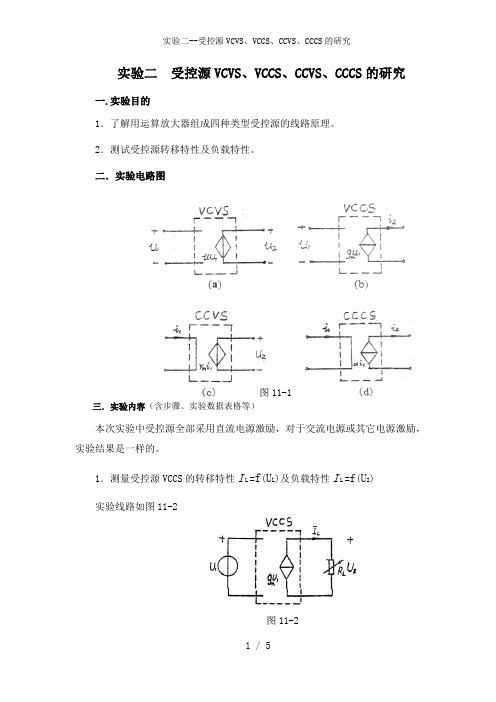
负载特性曲线
太阳能电池所接负载的P-R曲线

41.9 38.0 33.8 30.4 28.7 26.7 24.8 22.9 20.4 19.5 18.2
102.8 122.7 146.6 158.2 167.2 180.6 182.2 191.2 202.1 208.5 229.1
32.9 29.1 25.2 23.5 22.5 21.1 20.9 19.9 19.0 18.4 16.9
19.8 29.3 0.678
250.0
表四 最大功率PMAX和开路电压与短路电流的乘积 第一组 第二组 PMAX /mW 74.7 U0·IS /mW F=PMAX/(U0·IS) 0.728 98.6 0.758
第三组 55.3 73.3 0.755 36曲线曲线
制图人:夏远哲 2009114104
I /mA
91.2 105.1 116.8 129.0 149.6 166.1 180.3 190.1 201.0 211.0 229.3
46.6 41.2 37.4 33.9 29.8 26.8 24.7 23.4 22.2 21.1 19.4
90.7 103.1 118.3 133.1 142.3 153.0 166.4 179.6 204.0 215.8 230.3
108.4 122.0 129.0 139.8 149.6 162.3 176.8 188.3 197.8 211.8 229.1
18.6 19.7 19.8 19.5 19.1 18.2 17.3 16.6 16.0 15.3 14.3
表三 对应最大功率的负载阻值RMAX和根据(2)式计算的内阻 第一组 第二组 第三组 第四组 RMAX /Ω 45.3 55.4 78.7 129.0 Ri /Ω RMAX /Ri 49.1 0.923 60.2 0.920 81.6 0.965 130.0 0.993
实验二--受控源VCVS、VCCS、CCVS、CCCS的研究
实验二受控源VCVS、VCCS、CCVS、CCCS的研究一.实验目的1.了解用运算放大器组成四种类型受控源的线路原理。
2.测试受控源转移特性及负载特性。
二.实验电路图图图11-1三.实验内容(含步骤、实验数据表格等)本次实验中受控源全部采用直流电源激励,对于交流电源或其它电源激励,实验结果是一样的。
1.测量受控源VCCS的转移特性I L=f(U L)及负载特性I L=f(U2)实验线路如图11-2图11-2(1)固定R L=2KΩ,调节直流稳压电源输出电压U1,使其在0~5V范围内取值。
测量U1及相应的I L,绘制I L=f(U1)曲线,并由其线性部分求出转移电导g m。
实际计算值g m(S)=0.1S(2)保持U1=2V,令R L从0增至KΩ,测量相应的I L及U2,绘制I L=f(U2)曲线。
2.测量受控源CCVS的转移特性U2=f(I S)及负载特性U2=f(I L)实验线路如11-3。
Is为可调直流恒流源,RL为可调电阻箱。
固定R L=2KΩ,调节直流恒流源输出电流Is,使其在0~0.8mA范围内取值,测量Is及相应的U2值,绘制U2=f(I S)曲线,并由其线性部分求出转移电阻r m。
转移电阻Rm=2KΩ(2)保持Is=0.3mA,令R L从1 KΩ增至∞,测量U2及I L值,绘制负载特性曲线U2=f(I L)。
3.测量受控源VCVS的转移特性U2=f(U1)及负载特性U2=f(I L)实验线路如图11-4。
U1为可调直流稳压电源,R L为可调电阻箱。
(1)固定R L=2KΩ,调节直流稳压电源输出电压U1,使其在O~6V范围内取值,测量U1及相应的U2值,绘制U2=f(U1)曲线,并由其线性部分求出转移电压比μ。
实际计算值μ=2(2)保持U1=2V,令R L阻值从1KΩ增至∞,测量U2及I L,绘制U2=f(I L)曲线。
4.测量受控源CCCS的转移特性I L=f(I S)及负载特性I L=f(U2)实验线路如图11-5。
《电路基础》受控源VCCS、VCVS、CCVS、CCCS的特性曲线实验

《电路基础》受控源VCCS 、VCVS 、CCVS 、CCCS 的特性曲线实验一. 实验目的1. 加深对受控源的理解2. 熟悉由运算放大器组成受控源电路的分析方法,了解运算放大器的应用。
3. 掌握受控源特性的测量方法二. 实验原理与说明1. 受控源是双口元件,一个为控制端口,另一个为受控端口。
受控端口的电流或电压受到控制端口的电流或电压的控制。
根据控制变量与受控变量的不同组合,受控源可分为四类:i c=0 i c=0+ u c u c - - (a) VCVS (b) VCCS u c=0 u c=0 c c -(c) CCVS (d) CCCS图9-1 受控源(1) 电压控制电压源(VCVS ),如图7-1(a )所示,其特性为:0=c i(2) 电压控制电流源(VCCS ),如图7-1(b )所示,其特性为: c m s u g i ⋅=cs u u ⋅=α0=c i(3) 电流控制电压源(CCVS ),如图7-1(c )所示,其特性为:c s i u ⋅=γ0=c u(4) 电流控制电流源(CCCS ),如图7-1(d )所示,其特性为: c s i i ⋅=β0=c u2. 运算放大器与电阻元件组成不同的电路,可以实现上述四种类型的受控源。
各电路特性分析如下。
(1) 电压控制电压源(VCVS ):运算放大器电路如图7-2所示。
由运算放大器输入端“虚短”特性可知:1u u u ==-+212R u i R =由运算放大器的“虚断”特性,可知: 21R Ri i =21221R i R i u R R ⋅+⋅=()2121R R R u +=11211u u R R ⋅=⋅⎪⎪⎭⎫ ⎝⎛+=α式(7-1)++u 1 i R1 u 1 R Lu 2R 1 −i R2 u 2 i RR 2 R − − −图7-2 电压控制电压源(VCVS ) 图7-3 电压控制电流源(VCCS )即运算放大器的输出电压2u 受输入电压1u 控制。
1负载特性1恒转矩负载特性2离心式通风机型负载特性3直线型负载特性4恒功率负载特性
1负载特性1恒转矩负载特性2离心式通风机型负载特性3直线型负载特性4恒功率负载特性2稳定运行条件:1机械特性曲线与负载特性曲线有交点2干扰使转速上升,干扰消除后Tm-Tl《0,与之相反3限制直流电动机启动电流的方法:1降压启动2在电枢回路内串接外加电阻启动。
4调速特性:1改变电枢电路外串联电阻Rad 2改变电动机电枢供电电压U 3改变电动机主磁通fai5制动特性:1反馈制动2反击制动3能耗制动6电动机启动要求:1足够大的启动转矩,保证生产机械能正常启动2启动电流越小越好3要求启动平滑4启动设备安全可靠,力求结构简单,操作方便.5启动过程中功率损耗越小越好7降压启动方法1电阻或电抗器降压启动2星角降压启动3自耦变压器降压启动8接触器1交流接触器2直流接触器接触器由触头,灭弧装置,铁芯,线圈组成.9继电器分为1电流继电器2电压继电器3中间继电器4热继电器10保护装置有1短路电流的保护装置2长期过载保护装置3零压保护4零励磁保护.11选择电动机三项基本原则:1发热2过载能力3启动能力12三种工作制1连续工作制2短时工作制3重复短时工作制13三相鼠笼点击调速:1变频调速2变极调速14三相鼠笼电机在同电压下空载启动比满载启动转矩:相投15静态技术指标:1静差变2调速范围3调速平滑性16动态技术指标1最大超掉量2过渡过程时间3震动次数3.3 一台他励直流电动机所拖动的负载转矩T L=常数,当电枢电压或电枢附加电阻改变时,能否改变其运行其运行状态下电枢电流的大小?为什么?这个拖动系统中哪些要发生变化?T=K tφI a u=E+I a R a当电枢电压或电枢附加电阻改变时,电枢电流大小不变.转速n与电动机的电动势都发生改变.3.4一台他励直流电动机在稳态下运行时,电枢反电势E=E1,如负载转矩T L=常数,外加电压和电枢电路中的电阻均不变,问减弱励磁使转速上升到新的稳态值后,电枢反电势将如何变化? 是大于,小于还是等于E1?T=I a K tφ, φ减弱,T是常数,I a增大.根据E N=U N-I a R a ,所以E N减小.,小于E1.3.11为什么直流电动机直接启动时启动电流很大?电动机在未启动前n=0,E=0,而R a很小,所以将电动机直接接入电网并施加额定电压时,启动电流将很大.I st=U N/R a3.12他励直流电动机直接启动过程中有哪些要求?如何实现?他励直流电动机直接启动过程中的要求是1 启动电流不要过大,2不要有过大的转矩.可以通过两种方法来实现电动机的启动一是降压启动.二是在电枢回路内串接外加电阻启动.3.13 直流他励电动机启动时,为什么一定要先把励磁电流加上?若忘了先合励磁绕阻的电源开关就把电枢电源接通,这是会产生什么现象(试从T L=0 和T L=T N两种情况加以分析)?当电动机运行在额定转速下,若突然将励磁绕阻断开,此时又将出现什么情况?直流他励电动机启动时,一定要先把励磁电流加上使因为主磁极靠外电源产生磁场.如果忘了先合励磁绕阻的电源开关就把电枢电源接通,T L=0时理论上电动机转速将趋近于无限大,引起飞车, T L=T N时将使电动机电流大大增加而严重过载.3.15 一台直流他励电动机,其额定数据如下:P N=2.2KW,U N=U f=110V,n N=1500r/min, ηN=0.8,R a=0.4Ω, R f=82.7Ω。
第3章 液压动力元件

《液压伺服与比例控制系统》
多媒体授课系统
燕 山 大 学 《液压伺服与比例控制系统》课程组
第3章 液压动力元件
本章摘要
液压动力元件(或称液压动力机构)是由液压放 大元件(液压控制元件)和液压执行元件组成。有四 种基本型式的液压动力元件:阀控液压缸、阀控 液压马达、泵控液压缸、泵控液压马达。 本章将建立几种基本的液压动力元件的传递函 数,分析它们的动态特性和主要性能参数。
忽略Bp后近似为:
K ce h Ap
e mt
Vt
2 h
K c mt 2 h Ap
标准传递函数形式:
K ps Ap 1 Vt X v 1 s FL K K 4 e K ce Xp s s 2 2 o 1 2 s 1 o r o
简化为:
s FL Xp 2 s 2 h K K ce K s 1 s 2 2 h h Kh Ap
Kq K ce Vt X v 2 1 Ap Ap 4 e K ce
综合固有频率:
o h
K 1 Kh
综合阻尼比:
Bp 1 4 e K ce o 2o Vt 1 K K h mt
或进一步简化为:
s FL Xp K ce K s 2 2 h s 1 s 2 2 Ap h h Kq K ce Vt X v 2 1 Ap Ap 4 e K ce
(三) 其它简化形式:
Xp Xv Kq Ap K ce mt s 2 s 1 Ap Kq Ap Kq Ap s s 1 1
根据阀控液压缸的拉氏变换方程式绘出系统方框图。
电机及拖动基础第三章

第二节 生产机械的负载转矩特性
生产机械运行时常用负载转矩标志其负载的大小。不同的生产机 械转矩随转速变化规律不同,用负载转矩特性来表征,即生产机械的 转速n与负载转矩TL之间的关系n=f(TL)。各种生产机械特性大致可分 为以下三种类型。 一、恒转矩负载特性
恒转矩负载是指负载转矩TL的大小不随转速变化,TL=常数,这 种特性称为恒转矩负载特性。它有反抗性和位能性两种: 1.反抗性恒转矩负载
为恒定值,即
就是说,负载转矩与转速成反比。例如,一些机床切削加工, 车床粗加工时,切削量大(TL大),用低速档;精加工时,切削量小 (TL小),用高速档。恒功率负载特性曲线如图3-7所示。
三、通风机型负载特性 通风机型负载的特点是负载转矩的大小与转速n的二次方成正比,
即
式中K——比例常数。 常见的这类负载如鼓风机、水泵、液压泵等,通风机型负载特性
本章中首先介绍电力拖动系统的运动方程式,然后介绍生产机械 的转矩特性和三相异步电动机的机械特性,最后主要研究三相异步电 动机拖动应用的三大问题——起动、制动、调速。
第一节 电力拖动系统的运动方程式
电力拖动系统中所用的电动机种类很多,生产机械的性质也各不 相同。因此,需要找出它们普遍的运动规律,予以分析。从动力学的 角度看,它们都服从动力学的统一规律。所以,我们首先研究电力拖 动系统的动力学,建立电力拖动系统的运动方程式。 一、单轴电力拖动系统的运动方程式
曲线如图3-8所示。 必须指出,以上三类是典型的负载特性,实际生产机械的负载特
性常为几种类型负载的综合。例如起重机提升重物时,电动机所受到 的除位能性负载转矩外,还要克服系统机械摩擦所造成的反抗性负载 转矩,所以电动机轴上的负载转矩TL应是上述两个转矩之和。
变压器中电流电压变化曲线
变压器中电流电压变化曲线
在变压器中,电流和电压的变化曲线受到多种因素的影响。
首先,我们来看电压的变化曲线。
在理想情况下,变压器的输入电压
和输出电压之间是成反比例关系的,也就是说,当输入电压增加时,输出电压会相应地减小,反之亦然。
这种关系可以用变压器的变压
比来描述,变压比等于输出电压与输入电压的比值。
在实际情况下,由于变压器的内部电阻、漏感抗等因素的影响,输出电压会有一定
的波动,这会导致电压的变化曲线呈现出一定的波动。
而电流的变化曲线则受到负载特性的影响。
当负载增加时,输
出电流会相应地增加,而变压器的输入电流也会随之增加。
这种关
系可以用变压器的负载特性曲线来描述。
在实际应用中,变压器的
负载特性曲线通常是非线性的,这意味着在不同的负载下,电流的
变化曲线会呈现出不同的形态。
此外,变压器的工作状态也会对电流和电压的变化曲线产生影响。
例如,在变压器启动时,电流和电压会出现瞬时的变化,这种
变化可以通过变压器的启动特性曲线来描述。
另外,变压器在过载
或短路状态下的电流和电压变化曲线也会呈现出特定的形态。
综上所述,变压器中电流和电压的变化曲线受到多种因素的影响,包括变压比、负载特性、工作状态等。
在实际应用中,需要综合考虑这些因素,以确保变压器能够稳定可靠地工作。
电源外特性曲线
电源外特性曲线
电源外特性曲线是一个重要的测试工具,用于分析电源的性能特性、
故障和灵敏度/可靠性。
下面是一些常见的电源外特性曲线:
1. 功率输出曲线:以负载电流为横轴,输出功率为纵轴,来测量源的“最大功率”限制,以及适应多种负载的能力。
2. 频率响应曲线:以频率作为横轴,纵轴为输出电压,来衡量源的谐
振/噪声行为和频率响应功能。
3. 辐射曲线:用于评估电源对到达它的电磁辐射的响应程度,以衡量
其适应性和可缩放特性。
4. OVP/UVP 曲线:以电压作为横轴,负载电流为纵轴,来评估源的OVP/UVP 功能,以防止源在出现故障时将负载烧毁。
5. 热性能变化曲线:以温度为横轴,负载电流和电压调整纵轴,来评
估源的热行为特性有多大的变化。
6. 交直流抵消抢占曲线:以负载电流为横轴,交流或直流电压为纵轴,以测量源的抵消能力和可缩放特性。
7. 过载耐受能力曲线:以当负载超过额定电流时的负载电流为横轴,
由负载电压升至电流断开电压纵轴,以测量源对过载变化的响应程度。
通过测量电源外特性曲线,可以清楚地了解电源性能、故障率和可靠
性水平。
此外,这些曲线还有助于测量电源的散热性能,耐受负载变
化的能力,以及辐射和频率响应行为等。
这样就可以更好地满足用户
对电源的灵活性和可靠性的要求,为客户提供更高效能的产品。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
mt
d 2xp dt 2
ቤተ መጻሕፍቲ ባይዱBp
dx p dt
Kx p
FL
二、方框图与传递函数: 根据阀控液压缸的基本方程进行拉氏变换得:
QL Kq X v Kc PL
QL
ApsX p
Ctp PL
Vt
4e
sPL
ApPL mts2X p BpsX p KX p FL
根据阀控液压缸的拉氏变换方程式绘出系统方框图。
别有哪几个?它们对系统动态特性有什么影响? 4、何谓液压弹簧刚度?为什么要把液压弹簧刚度理解为动态刚
度? 5、液压固有频率和活塞位置有关.在计算系统稳定性时,四
通阀控制双作用液比缸和三通阀控制差动液压缸应取活塞的什 么位置?为什么? 6、为什么液压动力元件可以得到较大的固有频率? 7、为什么说液压阻尼比是一个“软量”?提高阻尼比的简单方 法有哪几种?它们各有什么优缺点? 8、何谓液压动力元件的刚度?代表什么意义? 9、三通阀控制液压缸和四通阀控制液压缸的固有顾率有什么 不同?为什么?
QL
Dm s m
Ctm PL
Vt
4e
sPL
DmPL J ts2m Bmsm Gm TL
二、方框图与传递函数:
m
J tVt
4 e Dm2
s3
Kq
Dm
J t Kce Dm2
Xv
Kce Dm2
1
Vt
4 e K ce
s TL
BmVt
4 e Dm2
s
2
1
Bm Kce Dm2
GVt
第四项是活塞运动速度;
第五项:Bp Kce
Ap2
sX p
是粘性力引起的泄漏流量所产生的活 塞速度;
第六项: KVt
4e Ap2
sX
p
是弹性力变化引起的压缩流量所产生 的活塞速度;
第七项:KKce
Ap2
X
p
是弹性力引起的泄漏流量所产生的活 塞速度。
三、传递函数简化
(一)、无弹性负载:
Xp
Kq Ap
Xv
1
1
Kq
Ap Kq
Xp Xv
1
Ap
K Kh
s
K ce K Ap2
K ce K s 1
r
Kq
X p Ap Xv s
四、频率响应分析
(一)、无弹性负载系统频率分析:
(1)速度放大系数 由于传递函数中包含一个积分环节、 所以在稳态时,液压缸活塞的输出速度与阀的输入位 移成比例.比例系数即为速度放大系数(速度增益)。 它表示阀对液压活塞速度控制的灵敏度。速度放大系 数直接影响系统的稳定件、响应速度和精度。提高速 度放大系数可以提高系绽的响应速度和精度。但使系 统的稳定性变坏。速度放大系数随阀的流量增益变化 而变化。
FL*
2 3
Ap ps
vL*
q0m 3Ap
当供油压力确定后,推得液压缸活塞面积为:
阀的最大空载流量为:
Ap
3 2
FL* ps
q0m 3vL* Ap
思考题
1、什么叫液压动力元件?有哪些控制方式?有几种基本组成类 型?
2、负载类型对液压动力元件的传递函数有什么影响? 3、无弹性负载和有弹性负载时,描述传递函数的性能参数分
Kce Ap2
1
Vt
4 e K ce
s FL
s
mtVt
4e Ap2
s2
mt Kce Ap2
BpVt
4e Ap2
s
1
简化为:
Xp
Kq Ap
Xv
Kce Ap2
1
Vt
4 e K ce
s
s2
h2
2 h h
s
1
s FL
液压固有频率: 液压阻尼比:
h
4e Ap2
mtVt
由方框图求得液压缸输出位移传递函数:
Xp
mtVt
4e Ap2
s3
Kq Ap
Xv
Kce Ap2
1
Vt
4 e K ce
s FL
mt Kce Ap2
BpVt
4e Ap2
s2
1
Bp Kce Ap2
KVt
4e Ap2
s
KKce Ap2
式中,分子的第一项是液压缸活塞的空载速度。第
Kq
m
Dm
Xv
s
s2
h2
2 h h
s
1
对外负载力矩TL的传递函数:
m
Kce Dm2
1
Vt
4 e K ce
s
TL
s
s2
h2
2 h h
s
1
3.3 三通阀控制液压缸
基本结 构形式
一、基本方程:
QL Kq X v Kc PL
QL
AhsX p
CipPc
V0
e
sPc
Pc Ah mts2 X p BpsX p KX p FL
思考题
10、阀控液压马达和泵控液压马达的特性有何不同,为什么? 11、为什么把称为速度放大系数?速度放大系数的量纲是什么? 12、何谓负载匹配?满足什么条件才算最佳匹配? 13、如何根据最佳负载匹配确定动力元件参数? 14、泵控液压马达系统有没有负载匹配问题?满足什么条件才
是泵控液压马达的最佳匹配? 15、在长行程时,为什么不宜采用液压缸而采用液压马达?
h2
2 h h
s
1
K Kh
s
K ce K Ah2
液压固有频率:
h
液压阻尼比:
Kh mt
e Ah2
mtV0
h
Kce 2 Ah
emt Bp
V0 2 Ah
V0
emt
传递函数近似式:
Xp
Kq Ah
Xv
Kce Ah2
1
V0
e K ce
s FL
s
K ce K Ah2
s2
h2
2 h h
2
x
x0
2
FI
x0m 2
1
负载特性曲线:
(二) 粘性负载特性 粘性负载特性的数学表达式:
Fv B x
x x0 sint 负载特性曲线:
x Fv B
(三) 弹性负载特性 弹性负载特性的数学表达式:
负载特性曲线:
2
x
x0
Fp Kx0
2
1
(四) 合成负载特性 负载特性的数学表达式:
二、传递函数:
Xp
mtV0
e Ah2
Kq Ah
Xv
Kce Ah2
1
V0
e K ce
s FL
s3
mt Kce Ah2
BpV0
e Ah2
s
2
1
Bp Kce Ah2
KV0
e Ah2
s
KKce Ah2
三、传递函数简化
Xp
Kq Ah
Xv
Kce Ah2
1
V0
e K ce
s FL
s2
4 e Kce
s FL
K Kh
s
Kce K Ap2
综合固有频率:
o h
1 K Kh
综合阻尼比:
o
1
2o
Vt
4 e K ce
1 K Kh
Bp mt
忽略Bp后近似为:
h
Kce Ap
emt
Vt
2 h h
Kcmt Ap2
标准传递函数形式:
Xp
K ps Ap K
Xv
1 K
1
Vt
s
1
(二)、有弹性负载:
Xp
mtVt
4e Ap2
s3
Kq Ap
Xv
Kce Ap2
1
Vt
4 e Kce
s FL
mt K Ap2
ce
BpVt
4e Ap2
s2
1
KVt
4e Ap2
s
KKce Ap2
简化为:
Xp
Kq Ap
Xv
s2
h2
2 h h
Kce Ap2
1
s 1
Vt
(二)、有弹性负载系统频率分析:
分析系统的主要参数对系统的性能的影响。由于 惯性环节的存在,使系统变成了一阶系统,对单 位阶跃输入就是有差的了。
K ps Ap
Xp
K
Xv
s
r
1
s2
o2
2 o o
s
1
3.2 四通阀控制液压马达
基本结 构形式
一、基本方程:
QL Kq X v Kc PL
V02
dp2 dt
Ap xp
2e
dp1 dt
dp2 dt
根据:V01 = V02 = V0 = Vt /2
同时:
Ap xp
V0,
dp1 dp2 0 dt dt
则液压缸流量连续性方程简化为:
qL
Ap
dx p dt
Ctp pL
Vt
4e
dpL dt
(三) 液压缸和负载的力平衡方程:
Ap pL
4 e Dm2
s
KKce Dm2
三、传递函数简化
Xp
Kq Dm
Xv
Kce Dm2
1
Vt
4 e K ce
s
s2
h2
2 h h
s
1
s TL
液压固有频率:
h