IAR下uCOS的C-SPY调试使用指南
IAR_使用最全方法

软件介绍AVR?IAREmbeddedWorkbench?IDE用户手册的这部分包括以下章节:✍✍✍产品介绍✍✍✍已安装文件1.1产品介绍嵌入式IAREmbeddedWorkbench?是一个非常有效的集成开发环境(IDE),它使用户充分有效有效提一个可扩展的模块化的环境尽管嵌入式IAREmbeddedWorkbenchIDE可以提供完成一个成功工程所需的所有工具,但我们也认识到集成其他工具的必要性。
因此,IAREmbeddedWorkbenchIDE容易适应于用户喜欢的编辑器和源代码控制系统。
IARXLINKLinker可以输出多种格式,使用户可在第三方的软件上进行调试。
实时操作系统(RTOS)支持也可加载到产品中。
编译器,汇编器和连接器也可在命令行环境中运行,用户可以在一个已建好的工程环境中把它们作为外部工具使用。
特性嵌入式IAREmbeddedWorkbench是一个灵活的集成开发环境,使用户可以针对多种不同的目标处理器开发应用程序。
并为快速开发和调试提供便捷的Windows截面。
++源窗口管理为使用户充分而方便地控制窗口的位置,每个窗口都可停靠,用户就可以有选择地给窗口做上标记。
可停靠的窗口系统还通过一种节省空间方式使多个窗口可同时打开。
另外,重新分配窗口大小也很方便。
2文本编辑器集成化的文本编辑器可以并行编辑多个文件,并具有时兴编辑器所期望的所有编辑特性,包括无限次的撤销/重做和自动完成。
另外它还包含针对软件开发的特殊功能,比如关键字的着色(C/C++,汇编和用户定义等)、段缩进、以及对源文件的导航功能。
还可识别C语言元素(例如括号的匹配问题)。
下表指出另外的一些特性:✍✍✍上下文智能帮助系统可以显示DLIB库的参考信息;✍✍✍使用文本风格和色条指出C、C++和汇编程序的语法;✍✍✍强大的搜索和置换功能,包括多文件搜索;驱动C-SPY 驱动的概述,请参见第8页,IARC-SPY调试器系统。
C语言调试技巧掌握常用的调试工具和技巧

C语言调试技巧掌握常用的调试工具和技巧C语言调试技巧:掌握常用的调试工具和技巧编程过程中,出现bug是常有的事情。
为了更高效地排查并解决问题,熟练掌握调试工具和技巧是每位程序员必备的能力之一。
本文将介绍一些常用的C语言调试工具和技巧,帮助读者提升调试问题的能力。
一、调试工具1. 编译器编译器是C语言开发中最基本的工具之一。
在编写源代码后,将其交给编译器,将其翻译成机器能够理解的二进制指令。
编译器可以检查代码中的语法错误,并生成可执行文件供运行。
2. 调试器调试器是一种用于帮助程序员查找和修复代码错误的工具。
它可以在程序运行过程中暂停程序执行,允许程序员查看并修改变量的值、观察程序的执行流程,并追踪程序运行的每一步。
常用的C语言调试器有GDB(GNU调试器)和LLDB(LLVM调试器)。
3. 日志记录工具日志记录工具可以帮助我们收集程序运行时的信息,以便更好地理解程序的执行流程,定位问题。
在C语言中,可以使用printf函数打印消息到控制台或者文件中,或者使用专门的日志库,如log4c。
二、调试技巧1. 打印调试信息在程序中合理地插入一些打印语句,输出关键变量的值,可以帮助我们更好地理解程序执行过程中的状态。
通过观察打印结果,可以确定程序的执行是否符合预期,以及哪些代码可能引起问题。
2. 单步调试单步调试是指逐行执行代码,并观察每一行代码的执行结果。
这可以帮助我们精确地追踪程序的执行流程,找出问题所在。
调试器提供了单步执行的功能,可以逐行执行代码,并查看变量的值、执行结果等信息。
3. 设置断点断点是指在程序中指定一个位置,使得程序执行到该位置时暂停。
通过设置断点,可以在程序执行过程中检查变量的状态,避免了繁琐的单步调试过程。
使用调试器可以轻松设置和管理断点。
4. 追踪内存错误在C语言中,内存错误是常见的问题。
使用调试器提供的内存调试功能,可以检测内存相关的错误,如访问未初始化的指针、越界访问数组等。
iar编译器使用指南

iar编译器使用指南(原创版)目录1.IAR 编译器简介2.IAR 编译器的特点3.IAR 编译器的安装与配置4.IAR 编译器的使用5.IAR 编译器的优势与不足正文【1.IAR 编译器简介】IAR 编译器,全称 IAR Embedded Workbench,是一款由瑞典 IAR Systems 公司开发的集成开发环境(IDE), 主要用于编写和编译嵌入式系统软件。
IAR 编译器支持多种编程语言,如 C、C++等,适用于各种微处理器架构。
【2.IAR 编译器的特点】IAR 编译器具有以下特点:(1)高度优化的编译器,生成的代码执行效率高;(2)强大的调试功能,支持在线调试、断点调试等;(3)支持多种处理器架构,如 ARM、MIPS 等;(4)提供丰富的库函数,方便开发者调用。
【3.IAR 编译器的安装与配置】安装 IAR 编译器需要先下载对应的安装包,然后按照安装向导进行安装。
安装完成后,需要配置编译器,包括设置编译选项、链接器选项等。
配置完成后,即可开始使用 IAR 编译器编写和编译代码。
【4.IAR 编译器的使用】使用 IAR 编译器编写代码时,需要创建一个项目,然后编写源代码文件。
编写完成后,可以使用 IAR 编译器进行编译,生成可执行文件。
在开发过程中,可以使用 IAR 提供的调试工具进行调试,以提高代码质量。
【5.IAR 编译器的优势与不足】IAR 编译器的优势在于其高度优化的编译器和强大的调试功能,能够帮助开发者快速编写高效、稳定的嵌入式系统软件。
然而,IAR 编译器也存在一些不足,如学习曲线较陡峭,对于初学者可能不太友好。
IAR使用详细说明书
IAR EW for MSP430安装指南和使用说明 第一部分 安装指南:1、双击名为keygen的图标,出现注册机的画面,在Product选项的下拉菜单里选择Electronic Workbench for MSP 430 V3.42A。
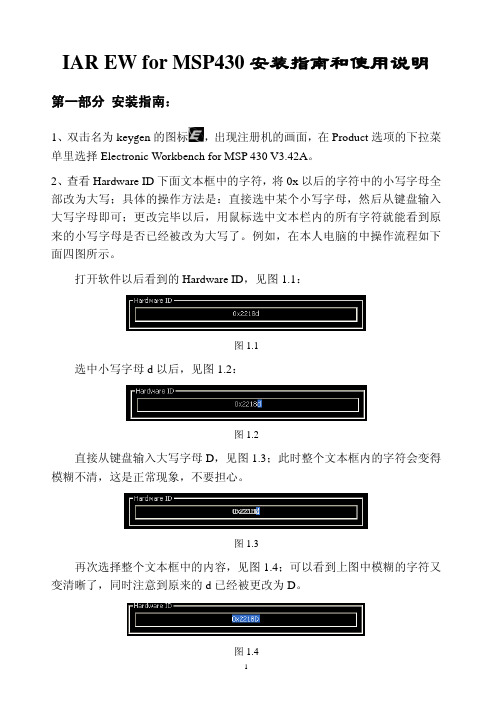
2、查看Hardware ID下面文本框中的字符,将0x以后的字符中的小写字母全部改为大写;具体的操作方法是:直接选中某个小写字母,然后从键盘输入大写字母即可;更改完毕以后,用鼠标选中文本栏内的所有字符就能看到原来的小写字母是否已经被改为大写了。
例如,在本人电脑的中操作流程如下面四图所示。
打开软件以后看到的Hardware ID,见图1.1:图1.1选中小写字母d以后,见图1.2:图1.2直接从键盘输入大写字母D,见图1.3;此时整个文本框内的字符会变得模糊不清,这是正常现象,不要担心。
图1.3再次选择整个文本框中的内容,见图1.4;可以看到上图中模糊的字符又变清晰了,同时注意到原来的d已经被更改为D。
图1.4这时,单击左下角的Generate图标就可以得到需要的序列号了。
3、双击名为EW430-ev-web-342A的图标,等待解压缩完毕后出现安装画面,单击Next后看到关于License的说明再单击accept就可以看到如图1.5所示的画面。
图1.54、用户可以随意更改Name和Company中的内容;然后选择已经打开的注册机,将License number+key下文本框中的数字复制出来,粘贴到图1.5的License 下面的文本框中,可以看到原来灰色的Next按钮变成了黑色,单击Next进入下一页,看到图1.6。
图1.65、再次回到已经打开的注册机,将最后一栏文本框中的全部数字复制出来,粘贴到License Key下面的文本框中,单击Next,看到图1.7。
图1.76、单击Browse可以更改安装目录;然后单击Next继续。
7、最后等待安装完成,单击Finish就大功告成了。
新手使用iar的流程
新手使用iar的流程简介IAR Embedded Workbench是一款由IAR Systems开发的嵌入式开发工具,广泛应用于嵌入式系统的开发中。
本文档将介绍新手使用IAR的流程,以帮助初学者快速上手。
购买和安装•购买IAR Embedded Workbench:前往IAR Systems官网,选择适合您的版本并进行购买。
•下载和安装:下载安装程序并按照提示进行安装。
创建工程1.打开IAR Embedded Workbench:双击桌面的IAR EmbeddedWorkbench图标以打开软件。
2.创建工程:点击菜单栏中的File,选择New Project。
在弹出的窗口中选择目标设备和编译器选项。
3.命名工程:在弹出的窗口中输入工程的名称和路径,点击OK。
编写代码1.打开源文件:在左侧的Project窗口中展开创建的工程,双击打开源文件。
2.编写代码:在打开的代码编辑窗口中编写程序,可以添加所需的头文件和宏定义等。
3.保存文件:使用快捷键Ctrl+S或点击菜单栏的File,选择Save来保存代码文件。
编译和构建1.设置编译器选项:点击菜单栏中的Project,选择Options。
在弹出的窗口中设置编译器选项,如编译器优化等。
2.编译代码:点击菜单栏中的Build,选择Rebuild All来编译整个工程。
3.构建:点击菜单栏中的Project,选择Options。
在弹出的窗口中选择Linker选项,设置构建选项和链接器脚本。
4.生成可执行文件:点击菜单栏中的Build,选择Rebuild All来生成可执行文件。
调试和烧录1.连接调试器:将目标设备连接到开发工具,例如通过JTAG或SWD接口连接。
2.配置调试器:点击菜单栏中的Debugger,选择Setup。
在弹出的窗口中选择调试器和通信接口。
3.调试程序:点击菜单栏中的Debug,选择Go来启动调试器并开始调试程序。
4.烧录程序:点击菜单栏中的Debugger,选择Download来烧录程序到目标设备。
说说IAR EWARM项目选项常用设置

项常用设置声明XX如是说——尊重他人劳动成果,也是一种美德……转载请注明出处闲话稍说相信热爱或者从事嵌入式的人,对IAR EWARM并不陌生,或许你对她驾轻就熟,但未必她对你就百依百顺。
曾多少次鼠标的点击“Options”,却没能了然于心,最后明白,唯有笔头……千呼万唤始出来,犹抱琵琶半遮颜!好了,下面就来说说IAR EWARM项目选项的常用设置吧目录Day Day Up笔记之说说IAR EWARM项目选项常用设置 (1)声明 (1)闲话稍说 (1)目录 (1)简介IAR EWARM (2)直奔主题 (2)项目选项的设置 (2)1、通用选项[General Options] (3)1.1、General Options->Target (3)2、C/C++编译选项设置 (5)2.1、C/C++ Compiler->Preprocessor (5)3、Linker选项设置 (6)3.1、Linker->Config (6)3.2、Linker->Output (8)3.3、Linker->Output (9)4、Debugger选项设置 (9)4.1、Debugger->Setup (9)4.2、Debugger->Download (10)IAR Embedded Workbench for ARM(下面简称IAR EWARM)是一个针对ARM 处理器的集成开发环境,它包含项目管理器、编辑器、C/C++编译器和ARM 汇编器、连接器XLINK 和支持RTOS 的调试工具C-SPY。
在EWARM 环境下可以使用C/C++和汇编语言方便地开发嵌入式应用程序。
比较其他的ARM 开发环境,IAR EWARM 具有入门容易、使用方便和代码紧凑等特点。
直奔主题特别说明:本笔记虽使用的是IAR EWARM 5.5版本,不过其他的版本设置大同小异,工程例子可以自行建立,也可以参照[原创][图文并茂]Day Day Up笔记之uCOS-II+LwIP在STM32F107上移植/thread-5494475-1-1.html一文中的例子。
IAR软件简单使用步骤
IAR软件简单使用步骤
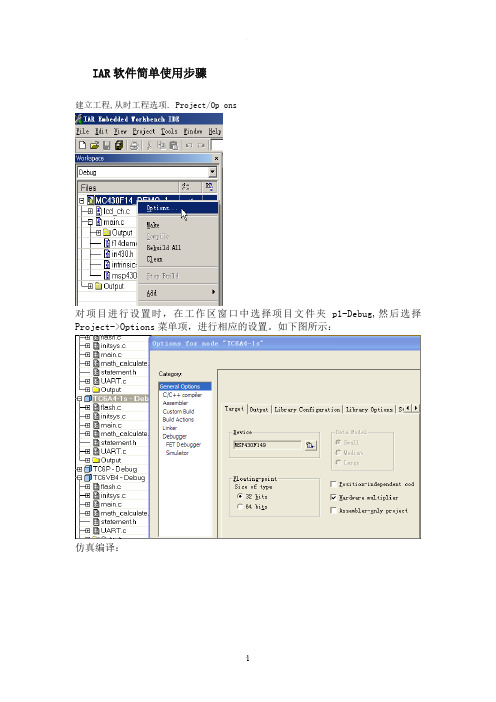
建立工程,从时工程选项. Project/Op ons
对项目进行设置时,在工作区窗口中选择项目文件夹p1-Debug,然后选择Project->Options菜单项,进行相应的设置。
如下图所示:
仿真编译:
生成烧录文本文件时:
2.2编译项目
在工作区中选择需要编译的文件,选择Project-〉Compile菜单项,或者单击工具栏上的Compile按钮,对源程序进行编译。
编译过程中的各种信息将显示在屏幕下面的Build信息窗口中。
如下图所示:
出现错误时,可以按照提示进行相应修改。
2.3连接项目和调试
进行Debugger和J-Link设置,如下两图所示:
选择项目文件夹,单击右键,点击“Make”按钮,如下图所示:
之后进行调试操作,用J-link 将目标板和电脑连接之后,点击工具栏上的
“Debugger”按钮,.如下图所示:
完成之后出现如下图的情形:
至此,可以进行单步调试,也可以点击“Stop Debugger”按钮,在目标板上进行测试。
部分按键中文解释:
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。
简述iar工程的相关配置流程及调试过程
简述iar工程的相关配置流程及调试过程标题: 简述iar工程的相关配置流程及调试过程正文:iar(IEEE Instrument for Autonomous and Robotic Systems)是一种自动化机器人系统,其目标是使机器人能够自主地执行任务。
iar工程通常包括以下两个主要部分:机器人硬件和软件。
1. 机器人硬件机器人硬件包括传感器、执行器和控制板等组件。
其中传感器用于感知环境和机器人的运动状态,执行器用于控制机器人的运动和操作,控制板用于控制机器人的电路和系统。
常用的传感器包括红外线传感器、超声波传感器、激光传感器和摄像头等。
执行器通常包括电机、控制器和驱动器等组件。
电机用于驱动机器人的运动,控制器用于控制机器人的行动,驱动器用于控制电机的转速和方向。
常用的执行器包括直流电机、步进电机和舵机等。
控制板通常用于控制机器人的行动和操作。
它通常包括输入输出接口、编程接口和控制器等组件。
编程接口用于编写机器人的程序,控制器用于控制机器人的行动和操作。
2. 机器人软件机器人软件包括控制系统、导航算法和执行算法等组件。
控制系统用于控制机器人的行动和操作,它通常包括输入输出接口、编程接口和控制器等组件。
导航算法用于规划机器人的路径和运动,它通常包括运动规划算法和路径规划算法等组件。
执行算法用于控制机器人的行动和操作,它通常包括电机控制算法、舵机控制算法和传感器数据处理算法等组件。
调试是确保iar机器人系统正常运行的关键步骤。
调试过程通常包括以下步骤:1. 诊断:使用诊断工具检查机器人的硬件和软件是否正常工作。
2. 定位:使用定位工具确定机器人的位置和方向。
3. 仿真:使用仿真工具模拟机器人在不同环境下的行为。
4. 测试:使用测试工具测试机器人的性能和功能。
5. 修复:根据测试结果修复机器人的故障。
6. 调试:根据修复后的机器人进行调试,确保其正常运行。
调试是确保iar机器人系统正常运行的关键步骤。