OP37AJ
乔丹篮球鞋系列(1代-23代)收藏
仅使用25% 的能量(热能,电能,石油类产品), 可减少80%的废料及焚化物生成。
减少96%胶合物。减少2/3的材料消耗。
Nike Considered
Air Jordan 23的每一个细节, 都体现出Considered这个伟大的理念:
1,使用溶剂型粘着剂,摒弃传统的工业胶水; 2,外底以环保橡胶为主要原料,材料本身的毒性大大降低,并掺加了
第十六代Air Jordan鞋 2000年 -2001年 乔十六代用一个独 特的鞋罩表达了“瞬变”的设 计理念,可以让这双鞋立即从 外场训练鞋变成内场比赛鞋。 第十六代Air Jordan鞋的外形 设计受到了时尚的轿车和建筑 的影响,特色是鞋底外侧的防 滑钉,但最主要的设计灵感来 源却是迈克尔· 乔丹从球员到决 策者(奇才队合伙人)的角色 转变。
创新的个性化可替换的后跟缓震片。 *如果你是大个子选手,通常做为中锋或 大前锋,那么你可以选择内置大气垫。 *如果你是小个子选手,得分后卫是你擅 长的角色,那后跟内置冲击气垫是你的 最佳选择。
保护性能
内侧
外侧
• 鞋内侧采用了更加贴合足弓的外露式弧形碳板,提供良好的支持性 • 鞋外侧的双层网眼材料能提供舒适的透气性和适当的保护,碳板外层 的透气孔可以缓解足部的闷热
AIR JORDAN 历代回顾
1985 ——2008
雕像下面的注解和手膜 The best there ever was. The best there ever will be.
Michael Jordan
出生日:1963年2月17日 出生地:纽约布鲁克林 身 高:1米98 毕业学校:84年毕业于北卡莱罗纳州立大学 NBA生涯:14个赛季(1984-1993、1994-1998、 2001-2002) 司 职:得分后卫/小前锋 效力球队:芝加哥公牛、华盛顿奇才 绰号:飞人 主要战绩: 6次NBA总冠军:(1991-93, 1996-98) 2次奥运会冠军:84、92年 1985年获NBA年度最佳新人奖 2次扣篮大赛冠军 6次当选NBA总决赛最有价值球员(MVP) 5次当选NBA常规赛最有价值球员 3次当选NBA全明星赛最有价值球员 1996年当选“NBA历史上最伟大的50位球员”之一 。 主要技术统计: NBA职业生涯总得分:29,277 列NBA总第4位 NBA职业生涯28次拿到三双 单场常规赛得分纪录:69分 单场季后赛得分纪录:63分
Freemaster用户指南
Freescale Semiconductor FMSTERUGRev. 2.1,6/2011 User’s GuideFreeMASTER for Embedded ApplicationsUser GuideImportant NoticeImportant NoticeFreescale provides the enclosed product(s) under the following conditions:This evaluation kit is intended for use of ENGINEERING DEVELOPMENT OR EVALUATION PURPOSES ONLY. It is provided as a sample IC pre-soldered to a printed circuit board to make it easier to access inputs, outputs, and supply terminals. This EVB may be used with any development system or other source of I/O signals by simply connecting it to the host MCU or computer board via off-the-shelf cables. This EVB is not a Reference Design and is not intended to represent a final design recommendation for any particular application. Final device in an application will be heavily dependent on proper printed circuit board layout and heat sinking design as well as attention to supply filtering, transient suppression, and I/O signal quality.The goods provided may not be complete in terms of required design, marketing, and or manufacturing related protective considerations, including product safety measures typically found in the end product incorporating the goods. Due to the open construction of the product, it is the user's responsibility to take any and all appropriate precautions with regard to electrostatic discharge. In order to minimize risks associated with the customers applications, adequate design and operating safeguards must be provided by the customer to minimize inherent or procedural hazards. For any safety concerns, contact Freescale sales and technical support services.As a prototype, this product does not fall within the scope of the European Union directive on electromagnetic compatibility and therefore may not meet the technical requirements of the directive. Please be aware that the products received may not be regulatory compliant or agency certified (FCC, UL, CE, etc.).Should this evaluation kit not meet the specifications indicated in the kit, it may be returned within 30 days from the date of delivery and will be replaced by a new kit.Freescale reserves the right to make changes without further notice to any products herein. Freescale makes no warranty, representation or guarantee regarding the suitability of its products for any particular purpose, nor does Freescale assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typical”, must be validated for each customer application by customer’s technical experts.Freescale does not convey any license under its patent rights nor the rights of others. Freescale products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of the Freescale product could create a situation where personal injury or death may occur.Should a Buyer purchase or use Freescale products for any such unintended or unauthorized application, The Buyer shall indemnify and hold Freescale and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that Freescale was negligent regarding the design or manufacture of the part.Freescale and the Freescale Logo are registered trademarks of Freescale, Inc. Freescale, Inc. is an EqualOpportunity/Affirmative Action Employer. Freescale and the Freescale Logo are registered in the US Patent and Trademark Office. All other product or service names are the property of their respective owners.Table of ContentsParagraph Page Number NumberImportant NoticeChapter 1 Introduction1.1Overview (1)1.2Supported Platforms (1)1.2.1Going Around SCI (1)1.3Where to Find the Latest Version (1)1.4FreeMASTER Features (1)1.5License (2)Chapter 2 QUESTIONS and ANSWERS2.1Why do I need it? (4)2.2What does it do? (4)2.3Why is it such a great demonstration tool? (4)2.4What could I do with it if I follow the instructions? (4)2.5How is it connected to a target development board? (4)2.6What are all of these dialog boxes for? (4)2.7How does a project relate to my application? (5)2.8How do I set up remote control? Why would I want to? (5)2.9What is the Watch-grid? (5)2.10What is the Recorder? (5)2.11What is the Oscilloscope? (5)Chapter 3 INSTALLATION3.1System Requirements (6)3.2Enabling a FreeMASTER Connection on the Target Application (6)3.3How to Install (6)Chapter 4 FreeMASTER USAGE4.1Application Window Description (7)4.1.1Project Tree (9)4.1.2Detail View (18)4.1.3Watch-Grid (20)4.2Variables (20)4.2.1Generating Variables (23)4.3Commands (23)4.4Importing Project Files (27)4.5Menu description (29)4.5.1File Menu (29)4.5.2Edit Menu (29)Table of Contents4.5.4Explorer Menu (30)4.5.5Scope Menu (30)4.5.6Item Menu (30)4.5.7Project Menu (31)4.6Toolbars (31)4.6.1Toolbar (31)4.6.2Watch Bar (31)Chapter 5 PROJECT OPTIONS5.1Communication (32)5.2Symbol Files (33)5.2.1Regular Expression-based MAP File Parser (34)5.3Packing Resource Files into Project File (35)5.3.1Resource Files Manager (37)5.4HTML Pages (37)5.5Demo Mode (38)Chapter 6 HTML and SCRIPTING6.1Special HTML Hyperlinks (40)6.2FreeMASTER ActiveX Object (41)6.3FreeMASTER ActiveX Object Methods (42)6.3.1SendCommand (42)6.3.2SendCommandDlg (43)6.3.3ReadVariable (44)6.3.4WriteVariable (45)6.3.5ReadMemory (46)6.3.6WriteMemory (47)6.3.7ReadXxxArray (48)6.3.8WriteXxxArray (49)6.3.9GetCurrentRecorderData (50)6.3.10GetCurrentRecorderSeries (51)6.3.11StartCurrentRecorder (52)6.3.12StopCurrentRecorder (53)6.3.13GetCurrentRecorderState (54)6.3.14RunStimulators (55)6.3.15StopStimulators (56)6.4FreeMASTER ActiveX Properties (57)6.5FreeMASTER ActiveX Object Events (58)6.5.1OnRecorderDone (58)6.5.1.1Description (58)6.6Examples (58)Appendix A References (59)List of FiguresFigure Page Number Number Figure 4-1.Initial Application Window (7)Figure 4-2.Application Window (8)Figure 4-3.Project Block Properties - Main Page (9)Figure 4-4.Project Block Properties - Watch Page (10)Figure 4-5.Project Block Properties - App. commands Page (10)Figure 4-6.Scope properties - Main Page (11)Figure 4-7.Scope Properties - Set-up Page (12)Figure 4-8.Basic Oscilloscope Chart (13)Figure 4-9.Third Variable Added (13)Figure 4-10.Third Variable Added - The Result (14)Figure 4-11.Joining two Y-blocks (14)Figure 4-12.Joining two Y-blocks - The Result (15)Figure 4-13.Recorder Properties - Main Page (16)Figure 4-14.Recorder Properties - Setup Page (17)Figure 4-15.Recorder Properties - Trigger Page (17)Figure 4-16.Demo Application Control Page (18)Figure 4-17.HTML Control Page Examples (19)Figure 4-18.Variables list Dialog Box (20)Figure 4-19.Variable Dialog Box - Definition Tab (21)Figure 4-20.Variable Dialog Box - Modifying Tab (22)Figure 4-21.Generating Variables (23)Figure 4-22.Project Application Commands (24)Figure 4-23.Sending Application Command (24)Figure 4-24.Application Command - Definition Tab (25)Figure 4-25.Application Command - Arguments Tab, page 1 (25)Figure 4-26.Application Command - Arguments Tab, page 2 (26)Figure 4-27.Application Command - Return Codes Tab (27)Figure 4-28.Import Project Tree Items (28)Figure 4-29.Import Project Objects (28)Figure 4-30.File Menu (29)Figure 4-31.Export graph image Dialog (29)Figure 4-32.View Menu (30)List of FiguresFigure 4-34.Scope Menu (30)Figure 4-35.Project Menu (31)Figure 4-36.Toolbar (31)Figure 4-37.Watch Bar (31)Figure munication Options (32)Figure 5-2.Symbol Files Options (33)Figure 5-3.Regular Expression-based xMap File Parser (35)Figure 5-4.Testing Your Regular Expression (35)Figure 5-5.Pack Directory Options (36)Figure 5-6.Pack Directory Options, Example 2 (36)Figure 5-7.Resource Files Manager (37)Figure 5-8.HTML Pages Options (38)Figure 5-9.Demo Mode Options (38)Figure 5-10.Exit Demo Mode Confirmation Dialog (39)List of TablesTable Page Number Number Table 6-1. FreeMASTER ActiveX Object Properties (57)List of TablesIntroduction Chapter 1 Introduction1.1OverviewThis User Manual describes the FreeMASTER application (formerly known as PC Master) developed by Freescale engineers to allow control of an embedded application from a graphical environment running on a PC. The application was initially created for developers of hard real-time motor control applications, but many users found it very useful for their custom development.The FreeMASTER application is fully backward compatible with previous “PC Master” versions.1.2Supported PlatformsThe PC-side FreeMASTER application can be installed on any Microsoft Windows-based systems starting Windows 98. For the embedded side, there were several different serial communication (SCI) drivers for each supported platform before 2006. The drivers differed in a programming style, other software drivers requirements, and the way the drivers were configured.In March 2006, Freescale released a SCI driver common for all supported platforms: DSP56F800, MC56F800E, HC08, HCS08, HC12, HCS12, HCS12X, MPC500, MPC5500, and ColdFire V2 MCF52xx. Although it still contains some platform-specific functions, the vast majority of the driver code, the documentation, and the way how the driver is configured is the same across all supported platforms. Together with the PC-side FreeMASTER version 1.3 released in 2006, the driver brought support for new features like target memory protection, target-side data addressing, and others. The new features are described in detail in the new SCI driver User Manual.1.2.1Going Around SCIThe original PC Master application already enabled implemention of custom communication plug-in modules, which could be used to replace the native SCI communication with a custom one. The latest FreeMASTER version 1.3 contains two such plug-in modules, which proved to be very useful in application development and debugging.The BDM Communication Plug-in enables a basic memory access operations to be performed by the FreeMASTER on the HCS08 and HC12/HCS12/X targets without any target CPU intervention. In other words, no embedded-side communication driver is needed, and the FreeMASTER is still able to perform its basic tasks, which are reading and writing the target memory. Currently, only the P&E Multilink BDM cables are supported (both USB and LPT), but there is a plan to extend this support to other kinds of interface cables.The JTAG/EOnCE Communication Plug-in enables a fully-featured communication with the 56F800E hybrid microcontrollers over the JTAG interface cable (either using a direct LPT access, or a universal connection of CodeWarrior Command Converter Server). The embedded-side driver is needed in this case. The plug-in uses the Real-time Data Exchange feature ofJTAG/EOnCE, which is very similar to the SCI communication. The driver is included in the FMASTERSCIDRV as a configurable option for the 56F800E platform.See more details about the communication plug-in modules in the read-me documents installed together with the latest FreeMASTER application.1.3Where to Find the Latest Versionnew SCI driver for the embedded-side./webapp/sps/site/prod_summary.jsp?code=FREEMASTERSimilarly, the embedded-side SCI drivers can be found by the keyword FMASTERSCIDRV. The direct download link is also referred in the “downloads” section of the FreeMASTER application home page.https:///webapp/sps/download/license.jsp?colCode=FMASTERSCIDRV1.4FreeMASTER Features•Graphical environment•Easy to understand navigation•Simple RS232 native connection and other options possible on selected platforms (BDM, JTAG,...)Introduction•Visualization of real-time data in the Scope window•Acquisition of fast data changes using the on-target Recorder•Built-in support for standard variable types (integer, floating point, bit fields)•Value interpretation using custom defined text messages•Several built-in transformations for real type variables•Automatic C-application variable extraction from compiler output files (ELF/DWARF1/2, Text-based map files,...)•Demo mode with password protection support•HTML-based description or navigation pages•ActiveX interface to enable VBScript or JScript control over embedded applications•Remote Communication Server enabling a connection to target board over a network, including the Internet Features not available in the free distribution•Communication plug-in modules available for other physical media and protocols (CAN/CCP, Ethernet, TCP/IP,...)•The Matlab interface to the FreeMASTER ActiveX object1.5LicenseFREESCALE SEMICONDUCTOR SOFTWARE LICENSE AGREEMENTThis is a legal agreement between you (either as an individual or as an authorized representative of your employer) and Freescale Semiconductor, Inc. (“Freescale”). It concerns your rights to use this file and any accompanying written materials (the “Software”). In consideration for Freescale allowing you to access the Software, you are agreeing to be bound by the terms of this Agreement. If you do not agree to all of the terms of this Agreement, do not download the Software. If you change your mind later, stop using the Software and delete all copies of the Software in your possession or control. Any copies of the Software that you have already distributed, where permitted, and do not destroy will continue to be governed by this Agreement. Your prior use will also continue to be governed by this Agreement.LICENSE GRANT. Freescale grants to you, free of charge, the non-exclusive, non-transferable right (1) to use the Software exclusively in conjunction with a development, prototype, or production platform utilizing at least one processor unit from Freescale (“Exclusive Use”), (2) to reproduce the Software, (3) to distribute the Software, and (4) to sublicense to others the right to use the distributed Software. The Software is provided to you only in object (machine-readable) form. You may exercise the rights above only with respect to such object form. You may not translate, reverse engineer, decompile, or disassemble the Software except to the extent applicable law specifically prohibits such restriction. In addition, you must prohibit your sublicensees from doing the same. If you violate any of the terms or restrictions of this Agreement, Freescale may immediately terminate this Agreement, and require that you stop using and delete all copies of the Software in your possession or control.COPYRIGHT. The Software is licensed to you, not sold. Freescale owns the Software, and United States copyright laws and international treaty provisions protect the Software. Therefore, you must treat the Software like any other copyrighted material (e.g. a book or musical recording). You may not use or copy the Software for any other purpose than what is described in this Agreement. Except as expressly provided herein, Freescale does not grant to you any express or implied rights under any Freescale or third-party patents, copyrights, trademarks, or trade secrets. Additionally, you must reproduce and apply any copyright or other proprietary rights notices included on or embedded in the Software to any copies or derivative works made thereof, in whole or in part, if any.SUPPORT. Freescale is NOT obligated to provide any support, upgrades or new releases of the Software. If you wish, you may contact Freescale and report problems and provide suggestions regarding the Software. Freescale has no obligation whatsoever to respond in any way to such a problem report or suggestion. Freescale may make changes to the Software at any time, without any obligation to notify or provide updated versions of the Software to you.NO WARRANTY. TO THE MAXIMUM EXTENT PERMITTED BY LAW, FREESCALE EXPRESSLY DISCLAIMS ANY WARRANTY FOR THE SOFTWARE. THE SOFTWARE IS PROVIDED “AS IS”, WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESS OR IMPLIED, INCLUDING, WITHOUT LIMITATION, THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, OR NON-INFRINGEMENT. YOU ASSUME THE ENTIRE RISK ARISING OUT OF THE USE OR PERFORMANCE OF THE SOFTWARE, OR ANY SYSTEMS YOU DESIGN USING THE SOFTWARE (IF ANY). NOTHING IN THIS AGREEMENT MAY BE CONSTRUED AS A WARRANTY OR REPRESENTATION BY FREESCALE THAT THE SOFTWARE OR ANY DERIVATIVE WORK DEVELOPED WITH OR INCORPORATING THE SOFTWARE WILL BE FREE FROM INFRINGEMENT OF THE INTELLECTUAL PROPERTY RIGHTS OF THIRD PARTIES.INDEMNITY. You agree to fully defend and indemnify Freescale from any and all claims, liabilities, and costs (including reasonable attorney’s fees) related to (1) your use (including your sublicensee’s use, if permitted) of the Software or (2) your violation of the terms and conditions of this Agreement.Introduction LIMITATION OF LIABILITY. IN NO EVENT WILL FREESCALE BE LIABLE, WHETHER IN CONTRACT, TORT, OR OTHERWISE, FOR ANY INCIDENTAL, SPECIAL, INDIRECT, CONSEQUENTIAL OR PUNITIVE DAMAGES, INCLUDING, BUT NOT LIMITED TO, DAMAGES FOR ANY LOSS OF USE, LOSS OF TIME, INCONVENIENCE, COMMERCIAL LOSS, OR LOST PROFITS, SAVINGS, OR REVENUES TO THE FULL EXTENT SUCH MAY BE DISCLAIMED BY LAW.COMPLIANCE WITH LAWS; EXPORT RESTRICTIONS. You must use the Software in accordance with all applicable U.S. laws, regulations and statutes. You agree that neither you nor your licensees (if any) intend to or will, directly or indirectly, export or transmit the Software to any country in violation of U.S. export restrictions.GOVERNMENT USE. Use of the Software and any corresponding documentation, if any, is provided with RESTRICTED RIGHTS. Use, duplication or disclosure by the Government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of The Rights in Technical Data and Computer Software clause at DFARS 252.227-7013 or subparagraphs (c)(l) and (2) of the Commercial Computer Software--Restricted Rights at 48 CFR 52.227-19, as applicable. Manufacturer is Freescale Semiconductor, Inc., 6501 William Cannon Drive West, Austin, TX, 78735.HIGH RISK ACTIVITIES. You acknowledge that the Software is not fault tolerant and is not designed, manufactured or intended by Freescale for incorporation into products intended for use or resale in on-line control equipment in hazardous, dangerous to life or potentially life-threatening environments requiring fail-safe performance, such as in the operation of nuclear facilities, aircraft navigation or communication systems, air traffic control, direct life support machines or weapons systems, in which the failure of products could lead directly to death, personal injury or severe physical or environmental damage (“High Risk Activities”). You specifically represent and warrant that you will not use the Software or any derivative work of the Software for High Risk Activities.CHOICE OF LAW; VENUE; LIMITATIONS. You agree that the statutes and laws of the United States and the State of Texas, USA, without regard to conflicts of laws principles, will apply to all matters relating to this Agreement or the Software, and you agree that any litigation will be subject to the exclusive jurisdiction of the state or federal courts in Texas, USA. You agree that regardless of any statute or law to the contrary, any claim or cause of action arising out of or related to this Agreement or the Software must be filed within one (1) year after such claim or cause of action arose or be forever barred.PRODUCT LABELING. You are not authorized to use any Freescale trademarks, brand names, or logos.ENTIRE AGREEMENT. This Agreement constitutes the entire agreement between you and Freescale regarding the subject matter of this Agreement, and supersedes all prior communications, negotiations, understandings, agreements or representations, either written or oral, if any. This Agreement may only be amended in written form, executed by you and Freescale.SEVERABILITY. If any provision of this Agreement is held for any reason to be invalid or unenforceable, then the remaining provisions of this Agreement will be unimpaired and, unless a modification or replacement of the invalid or unenforceable provision is further held to deprive you or Freescale of a material benefit, in which case the Agreement will immediately terminate, the invalid or unenforceable provision will be replaced with a provision that is valid and enforceable and that comes closest to the intention underlying the invalid or unenforceable provision.NO WAIVER. The waiver by Freescale of any breach of any provision of this Agreement will not operate or be construed as a waiver of any other or a subsequent breach of the same or a different provision.QUESTIONS and ANSWERSChapter 2 QUESTIONS and ANSWERSFirst question: why place this topic immediately after an introduction? The reason is really quite practical. While writing this User Manual, the following questions were raised. Since the answers to these questions clarified terms and topics described further in the manual, it was decided to put this topic before those that are more detailed and perhaps less easily understood.2.1Why do I need it?The primary goal of developing FreeMASTER software was to deliver a tool for debugging and demonstrating Motor Control algorithms and applications. The result was a tool with the versatility to be used for multipurpose algorithms and applications. Some real-world uses include:•Real-time debugging - FreeMASTER allows users to debug applications in true real-time through its ability to watch variables. Moreover, it allows debugging at the algorithm level, which helps to shorten the development phase.•Diagnostic tool - FreeMASTER remote control capability allows it to be used as a diagnostic tool for debugging customer applications remotely across a network.•Demonstrations - FreeMASTER is an outstanding tool for demonstrating algorithm or application execution and variable outputs.•Education - FreeMASTER may be used for educational purposes. Its application control features allow students to play with the application in demonstration mode, learning how to control program execution.2.2What does it do?FreeMASTER communicates with the target system application via serial communication to read and write application internal variables. FreeMASTER provides the following visualization features for displaying variable information in a friendly format: •Oscilloscope - provides monitoring/visualization of application variables in the same manner as a classical oscilloscope with a CRT. In this case, monitoring rates are limited by the serial communication speed.•Recorder - provides monitoring/visualization of application variables that are changing at a rate faster than the sampling rate of the oscilloscope. While the Scope periodically reads FreeMASTER variable values and plots them in real-time, the Recorder is running on the target board. Variable values are sampled into a memory buffer on the board, then the sampled data is downloaded from board to FreeMASTER. This mechanism allows a much shorter sampling period and enables sampling and plotting of very quick actions.2.3Why is it such a great demonstration tool?The embedded-side algorithm can be demonstrated in one block, or divided into several blocks, depending on which possibility better reflects the algorithm structure. Each block’s input parameters may be explored to observe how they affect output parameters. Each block has a description tab for explaining algorithm details using multimedia-capable and scriptable HTML format.2.4What could I do with it if I follow the instructions?Using the demo project included with the embedded-side implementation, it is easy to learn how to use FreeMASTER by playing with the project’s defined blocks and parameters. The demo project allows you to understand how to control the application as well. You can go into details of each item, check its properties, change parameters, and determine how each can be used in your application. For a detailed explanation of the parameters, see Chapter 4, “FreeMASTER USAGE.2.5How is it connected to a target development board?FreeMASTER requires a serial communication port on the target development hardware. Connection is made using a standard RS-232 serial cable. On one side, the cable is plugged into the PC serial port (COM1, COM2 or other), and on the opposite side, into the target development board’s serial connector.In addition to RS232 link, the custom communication plug-in modules can be written and used by FreeMASTER. There are communication plug-ins available for CAN Calibration Protocol, JTAG Real-time Data Exchange port on 56F800E, BDM interface on HCS08/12 devices, etc.2.6What are all of these dialog boxes for?In Chapter 4, “FreeMASTER USAGE, you will see pictures with dialog boxes. These dialog boxes are used as a questionnaire, where you will enter parameters describing, for example, one algorithm block or application variable and its visualization.QUESTIONS and ANSWERS2.7How does a project relate to my application?There can be many FreeMASTER projects related to a single target-board application. For example, three specific FreeMASTER projects can work with the same board application to provide three different purposes:•to provide information used during debug process•to provide service maintenance capabilities•may be used for learning about your application during operator training phase2.8How do I set up remote control? Why would I want to?For remote control, you need at least two computers connected via a network, one running the standalone mini-application called FreeMASTER Remote Communication Server, and the second running the standard FreeMASTER application. The target development board is then connected to the computer running FreeMASTER Server.Remote control operation is valuable for performing remote debugging or diagnostics. An application may be diagnosed remotely by connecting the target development board to the remote PC, and then running the FreeMASTER locally with a service project for this customer’s application.2.9What is the Watch-grid?The Watch-grid is one of the panes in the FreeMASTER application window. It shows selected application variables and their content in human readable format. The application variables displayed are selected separately in the block property settings of each project block.2.10What is the Recorder?The Recorder is created in software on the target development board, and stores changes of variables in real-time. You can define the list of variables which will be recorded by the embedded-side timer periodic interrupt service routine. After the requested number of variable samples are stored within the Recorder buffer on the target board, it is downloaded from the board and displayed in FreeMASTER Recorder pane as a graph. The main advantage of the Recorder is the ability to sample very fast actions.2.11What is the Oscilloscope?FreeMASTER Oscilloscope is similar to the classical hardware oscilloscope. It shows graphically selected variables in real-time. The variable values are read from the board application in real-time through the serial communication line. The oscilloscope GUI looks similar to the Recorder, except that the sampling speed of variables is limited by the communication data link.。
P0799-钢琴谱-经典-君往何处-Quo-Vadis-节奏大师精选曲目
t t
#ttÇ ttÇ
t t ttÇ ttÇ t
t
ttÇ ttÇ
t ttÇ ttÇ
t
t
t ttÇ ttÇ
87
> """" ? """"
tÇ tÇ tÇ tÇ t t ttÇ ttÇ t
t#t t "t t t t ttÇ tÇ
t
|
tttt t
t ttÇ ttÇ t ttt #tttt t
t
t
tÇ
tÇ
tÇ
d tIÇ
d It t
t t tYt d t t tYt
d
t t tYt d t t tYt d
Page 1/Total 7
15
> """"
tttttttt
tÇ
tttttt
? """"
t t
t
tYt
d
t
t
tYt
d
tt
tYt
d
It t
d
t t t t t t t t t t t t t t t t
tYttt d
d tI t
t "ttt t
ttt tt
tYt d
It d t
t t
#tttt
tttt
tttt
It d t
9
> """"
t
t t t t t t t ttt t t #t t t t t t t t "t t t t t t t #t t t t t t #t t #t t t t t
神视传感器
SUNX全球网络
ƹ⌆Ͼ⚍ ƹ(8523( 3DQDVRQLF(OHFWULF:RUNV (XURSH $* ƹЁ ϰफѮഄऎϾ⚍ ƹ&+,1$ ($67$6,$ 3DQDVRQLF(OHFWULF:RUNV &KLQD &R/WG ᔙࢶᇷႂߔథᬌМՂ 3(:.5 ᭽
备有5m电缆长度型(标准:2m或3m)
·型号表
种 类
SUS安装支架型 PVC安装支架型 PFA安装支架型 PVC安装支架型 通用型 耐化学品型
标 准
EX-F71 EX-F71-PN EX-F72 EX-F72-PN EX-F61 EX-F61-PN EX-F62 EX-F62-PN
5m电缆长度
EX-F71-C5 EX-F71-PN-C5 EX-F72-C5 EX-F72-PN-C5 EX-F61-C5 EX-F61-PN-C5 EX-F62-C5 EX-F62-PN-C5
·MS-EX-F6-1 (PFA安装支架)
·MS-EX-F6-2 ·SL-CP1 ·SC-PK (吸附外连接器) (连接器底帽) (PVC安装支架) 每套8个 每套10个
·MS-SL-2 (部件安装基座)
4 3 2
FZ-10
·MS-EX-F7-3 (PVC安装支架)
1
规格
传感器 种 类 NPN输出型 PNP输出型 型号 通用型 SUS安装支架型 EX-F71 EX-F71-PN PVC安装支架型 EX-F72 EX-F72-PN EX-F61 EX-F61-PN 耐化学品型 PFA安装支架型 PVC安装支架型 EX-F62 EX-F62-PN
神视网页:/
1
特殊用途传感器篇产品目录
漏液/液面检测
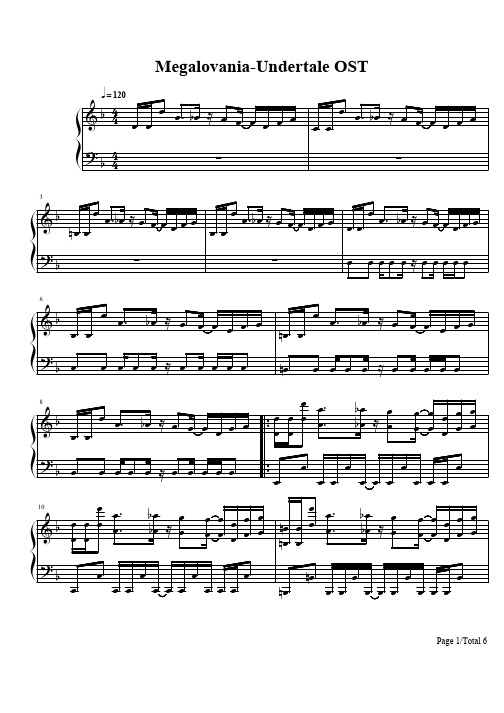
Megalovania钢琴谱五线谱 完整版原版
Page 4/Total 6
Hale Waihona Puke > 45 "
tt ¿
tt
t tt
tt tt tt
t t t tt
tt tt t tt
tt tt tt
t t t tt
? "
¿t
t
t
t t
t
tt
t
t
t
t t
tt
t
t
t tt t tt ttt
> 47 " tt tt t tt ""tt tt tt "t t t tt tt tt t tt !#tt tt tt #t t t tt
tÇ"t
et
t
t
t
t
t
t t t tÇ"t e t t t t t t
t t t tÇ"t e t t t t t t
? "
a
a
a
Page 6/Total 6
tt
? "
"t "t
tt
t "t
t
"t tt
tt
t
tt
t
t
t tt ttt ttt
26
> " tt
tt
tt
tt
||
t "t t "t t t "t t
? " t
t
t
t
t tt ttt ttt
tt
t
t
t tt ttt ttt
28
> " ""||
三自由度机械手毕业设计

摘要机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,由其控制系统执行预定的程序实现对工件的定位夹持。
完全取代了人力,节省了劳动资源,提高了生产效率。
本设计以实现铣床自动上下料为目的,设计了个水平伸缩距为200mm,垂直伸缩距为200mm具有三个自由度的铣床上下料机械手。
机械手三个自由度分别是机身的旋转,手臂的升降,以及机身的升降。
在设计过程中,确定了铣床上下料机械手的总体方案,并对铣床上下料机械手的总体结构进行了设计,对一些部件进行了参数确定以及对主要的零部件进行了计算和校核。
以单片机为控制手段,设计了机械手的自动控制系统,实现了对铣床上下料机械手的准确控制。
关键词:机械手;三自由度;上下料;单片机AbstractManipulator , an automation equipment with function of grabbing and moving the workpiece ,is used in an automated production process.It perform scheduled program by the control system to realize the function of the positioning of the workpiece clamping. It completely replace the human, saving labor resources, and improve production efficiency.This design is to achieve milling automatic loading and unloading .Design a manipulator with three degrees of freedom and 200mm horizontal stretching distance, 120mm vertical telescopic distance. Three degrees of freedom of the manipulator is body rotation, arm movements, as well as the movements of the body. In the design process, determine the overall scheme of the milling machine loading and unloading manipulator and milling machine loading and unloading manipulator, the overall structure of the design parameters of some components as well as the main components of the calculation and verification. In the means of Single-chip microcomputer for controlling, design the automatic control system of the manipulator and achieve accurate control of the milling machine loading and unloading.Key words: Manipulator; Three Degrees of Freedom; Loading and unloading; single chip microcomputer目录摘要.........................................................................I第1章绪论.............................................................11.1选题背景................................................... (1)1.2设计目的.........................................................11.3国内外研究现状和趋势............................................21.4设计原则.........................................................2第2章设计方案的论证..................................................32.1 机械手的总体设计...............................................32.1.1机械手总体结构的类型....................................32.1.2 设计具体采用方案........................................42.2 机械手腰座结构设计.............................................52.2.1 机械手腰座结构设计要求.................................52.2.2 具体设计采用方案........................................52.3 机械手手臂的结构设计...........................................62.3.1机械手手臂的设计要求....................................62.3.2 设计具体采用方案........................................72.4 设计机械手手部连接方式.........................................72.5 机械手末端执行器(手部)的结构设计...........................82.5.1 机械手末端执行器的设计要求.............................82.5.2 机械手夹持器的运动和驱动方式..........................92.5.3 机械手夹持器的典型结构.................................92.6 机械手的机械传动机构的设计..................................102.6.1 工业机械手传动机构设计应注意的问题...................102.6.2 工业机械手传动机构常用的机构形式.....................102.6.3 设计具体采用方案.......................................122.7 机械手驱动系统的设计.........................................122.7.1 机械手各类驱动系统的特点..............................122.7.2 机械手液压驱动系统.....................................132.7.3机身摆动驱动元件的选取................................132.7.4 设计具体采用方案.......................................142.8 机械手手臂的平衡机构设计.....................................14第3章理论分析和设计计算............................................163.1 液压传动系统设计计算..........................................163.1.1 确定液压传动系统基本方案...............................163.1.2 拟定液压执行元件运动控制回路...........................173.1.3 液压源系统的设计........................................173.1.4 确定液压系统的主要参数.................................173.1.5 计算和选择液压元件......................................243.1.6机械手爪各结构尺寸的计算...................................26 第4章机械手控制系统的设计..........................................284.1 系统总体方案..................................................284.2 各芯片工作原理................................................284.2.1 串口转换芯片............................................284.2.2 单片机...................................................294.2.3 8279芯片...............................................304.2.4 译码器...................................................314.2.5 放大芯片................................................324.3 电路设计..................................................334.3.1 显示电路设计............................................334.3.2 键盘电路设计............................................334.4 复位电路设计..................................................334.5 晶体振荡电路设计.............................................344.6 传感器的选择..................................................34结论.....................................................................36致谢.....................................................................37参考文献................................................................38CONTENTS Abstract (I)Chapter 1 Introduction (1)1.1 background (1)1.2 design purpose (1)1.3 domestic and foreign research present situation and trends (2)1.4 design principles (2)Chapter 2 Design of the demonstration (3)2.1manipulator overall design (3)2.1.1 manipulator overall structure type (3)2.1.2 design adopts the scheme (4)2.2 lumbar base structure design of mechanical hand (5)2.2.1 manipulator lumbar base structure design requirements (5)2.2.2specific design schemes (5)2.3mechanical arm structure design (6)2.3.1 manipulator arm design requirements (6)2.3.2 design adopts the scheme (7)2.4 design of mechanical hand connection mode (7)2.5 the manipulator end-effector structure design (8)2.5.1 manipulator end-effector design requirements (8)2.5.2 manipulator gripper motion and driving method (9)2.5.3 manipulator gripper structure (9)2.6 robot mechanical transmission design (10)2.6.1 industry for transmission mechanism of manipulator design shouldpay attention question (10)2.6.2 industrial machinery hand transmission mechanism commonlyused form of institution (10)2.6.3 design adopts the scheme (12)2.7 mechanical arm drive system design (12)2.7.1 manipulator of various characteristics of the drive system (12)2.7.2 hydraulic drive system for a manipulator (13)2.7.3 Body swing the selection of drive components (13)2.7.4 Design the specific use of the program (14)2.8 mechanical arm balance mechanism design (14)Chapter 3 Theoretical analysis and design calculation (16)3.1 hydraulic system design and calculation (16)3.1.1 the basic scheme of hydrauic transmission system (16)3.1.2 formulation of the hydraulic actuator control circuit (17)3.1.3 hydraulic source system design (17)3.1.4 determine the main parameters of the hydraulic system (17)3.1.5 calculation and selection of hydraulic components (24)3.1.6 Manipulator calculation of the structural dimensions (26)Chapter 4 The robot control system design (28)4.1 Overall scheme (28)4.2 Chip works (28)4.2.1 serial conversion chip (28)4.2.2 MCU (29)4.2.3 8279 chip (30)4.2 .4 decoder (31)4.2.5 amplifier chip (32)4.3 Circuit design (33)4.3.1 show the circuit design (33)4.3.2 The keyboard circuit design (33)4.4 Reset circuit design (33)4.5 crystal oscillation circuit design (34)4.6 sensor selection (34)Conclusion (36)Acknowledgements (37)References (38)第1章绪论1.1选题背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
芝麻开花 英语课堂作业本(配人教PEP版) 三年级下册

!"#$% !"! &'()*+
!"#$6789-+#(8
1-2$3
!"#$-Ejk2z{
6 #$H)*3?;FA/5
D)2?;*32*4)25$
7$*/+3 6$<A3)25 -$95*+,<A3)25
6 %$IF
10:2;2*30+9*..12;$
-%+.# ($X)*+9!2+90; <F@502+,$P20;@5A<
-)0+*
-*+*,*$
3*D-E
- #$MAA,<A5+0+9
*+,9051;$
7$8AF6$*8AF-$8AF;
6 %$G)0;0;I5VA+2;$
*32*4)25$
7$)2
"
!"#$% !"! &'()*+
1-2$4
!"#$-./0"12*+
6 #$7$4*36$)2*,-$.1*F
6 %$7$*+,
6$.*+,*
-$4)*+3
7 &$7$BC
6$BD7
-$-PE
6 '$7$)*+,
6$-*+*,*
6$P2?;<F95*+,.*$ 6$G)0;0;<F85A3)25$
6 #$7$P2?;<F95*+,.*$
7 %$
6$D)2?;<F95*+,<*$ 7$D)2?;<F;0;325$
各运动品牌鞋子码数详细对照表—意大利UTT品牌鞋子-广州铂威服饰鞋子尺码

各运动品牌鞋子码数详细对照表—意大利UTT品牌鞋子-广州铂威服饰鞋子尺码意大利UTT时尚国际有限公司【Italy utt Fashion International co., Limited】于 2011年10月6日在香港成立。
公司注册编号为:1669515,属于香港本地公司(私人公司)。
主要经营意大利UTT品牌鞋服。
2011年UTT品牌与广州铂威鞋服有限公司达成战略合作伙伴关系,正式挂旗进军大中华区。
这个牌子是鞋子进入中国之后根据中国的国情,设计了一套与意大利那边不一样的一套鞋模,因此同一鞋号的鞋子,内膜的实际长度是不一样的。
亲们购买这个牌子的鞋子的时候特别要注意下,下面是UTT铂威内膜鞋长的数据,供亲们参考下。
UTT品牌楦长数据分类鞋款码数 35 36 37 38 39 40 41 42 43 44 45公司内码(UK码) 3 3.5 4.5 5.5 6 7 7.5 8.5 9.5 10 11 女款楦长(mm) 224.7 233.16 241.62 250.08 254.31 262.77 267 275.46 283.92 288.15 296.6135-39码为女段,39-45码为男段楦长:即是“脚模”的长度,对应客户脚部实际的长度。
medical students and junior doctors to complete tasks, with clinical research and paper writing ability, professional foreign language proficiency required to read foreign literature, as well as at higher levels under the guidance of doctors completing more complex surgery. Second, training method 1. training for 3 years. Trained in surgical sub specialties Web learning. Rotary Department time (months) General surgical 15 (including in superior physician guide Xia general surgicaloutpatient 3 months) orthopedic 6 (including in superior physician guide Xia orthopedic outpatient 1 months) urinary surgical 3 heart surgical 3 neural surgical 3 anesthesia section 2 surgical heavy syndrome guardianship treatment room (SICU) 1 surgical emergency 3 (in principle General outside 2 months, orthopedic 1 months, the hospital can according to specific situation adjustment) total 36 2. by Shanghai City resident standardized training Committee big surgical training working group organization related theory class lecture. Three, training contents and requirements (a) General Surgery 1. Rotary objective: disinfection and aseptic techniques, water and electrolyte balance 耐克/Nike 运动鞋尺码对照表(男鞋尺码对照表) 美国码/US 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12 13 14 15 欧码/EUR 38.5 39 40 40.5 41 42 42.5 43 44 44.5 45 45.5 46 47.5 48.5 49.5 厘米/MM 240 245 250 255 260 265 270 275 280 285 290 295 300 310 3.0 330耐克/Nike 运动鞋尺码对照表(女鞋尺码对照表) 美国码/US 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12 欧码/EUR 35.5 36 36.5 37.5 38 38.5 39 40 40.5 41 42 42.5 43 44 44.5 厘米/MM 220 225 230 235 240 245 250 255 260 265 270 275 280 285 295medical students and junior doctors to complete tasks, with clinical research and paper writing ability, professional foreign language proficiency required to read foreign literature, as well as at higher levels under the guidance of doctors completing more complex surgery. Second, training method 1. training for 3 years. Trained in surgical sub specialties Web learning. Rotary Department time (months) Generalsurgical 15 (including in superior physician guide Xia general surgical outpatient 3 months) orthopedic 6 (including in superior physician guide Xia orthopedic outpatient 1 months) urinary surgical 3 heart surgical 3 neural surgical 3 anesthesia section 2 surgical heavy syndrome guardianship treatment room (SICU) 1 surgical emergency 3 (in principle General outside 2 months, orthopedic 1 months, the hospital can according to specific situation adjustment) total 36 2. by Shanghai City resident standardized training Committee big surgical training working group organization related theory class lecture. Three, training contents and requirements (a) General Surgery 1. Rotary objective: disinfection and aseptic techniques, water and electrolyte balance ADIDAS阿迪达斯运动鞋尺码对照表(男鞋尺码对照表) 美国码/US 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 欧码/EUR 39 39.5 40 41 42 42.5 43 43.5 44 45 46 46.5 厘米/MM 2405 250 255 260 265 270 275 280 285 290 295 300ADIDAS阿迪达斯运动鞋尺码对照表(女鞋尺码对照表) 美国码/US 3 3.5 4 4.5 5 5.5 6 6.5 欧码/EUR 34 35 36 37 37.5 38 39 39.5 厘米/MM 215 220 225 230 235 240 245 250medical students and junior doctors to complete tasks, with clinical research and paper writing ability, professional foreign language proficiency required to read foreign literature, as well as at higher levels under the guidance of doctors completing more complex surgery. Second, training method 1. training for 3 years. Trained in surgical sub specialties Web learning. Rotary Department time (months) General surgical 15 (including in superior physician guide Xia general surgicaloutpatient 3 months) orthopedic 6 (including in superior physician guide Xia orthopedic outpatient 1 months) urinary surgical 3 heart surgical 3 neural surgical 3 anesthesia section 2 surgical heavy syndrome guardianship treatment room (SICU) 1 surgical emergency 3 (in principle General outside 2 months, orthopedic 1 months, the hospital can according to specific situation adjustment) total 36 2. by Shanghai City resident standardized training Committee big surgical training working group organization related theory class lecture. Three, training contents and requirements (a) General Surgery 1. Rotary objective: disinfection and aseptic techniques, water and electrolyte balance 匡威运动鞋尺码对照表中性硫化鞋(ALL STAR系列、PRO STAR系列)尺码对照表中国 35 36 36.5 37 37.5 38 39 39.5 40 41 41.5 42 42.5 43 44 美国 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 厘米/MM 220 225 230 235 240 245 245 250 255 260 265 270 275 280 285中性硫化鞋(ONE STAR系列、STAR 70系列、JACK PURCELL系列、SKID GRIP系列)尺码对照表中国 35 35.5 36 37 37.5 38 38.5 39 40 40.5 41 42 42.5 43 44 美国 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 厘米/MM 210 215 220 225 230 235 240 245 250 255 260 265 270 275 280medical students and junior doctors to complete tasks, with clinical research and paper writing ability, professional foreign language proficiency required to read foreign literature, as well as at higher levels under the guidance of doctors completing more complex surgery.Second, training method 1. training for 3 years. Trained in surgical sub specialties Web learning. Rotary Department time (months) General surgical 15 (including in superior physician guide Xia general surgical outpatient 3 months) orthopedic 6 (including in superior physician guide Xia orthopedic outpatient 1 months) urinary surgical 3 heart surgical 3 neural surgical 3 anesthesia section 2 surgical heavy syndrome guardianship treatment room (SICU) 1 surgical emergency 3 (in principle General outside 2 months, orthopedic 1 months, the hospital can according to specific situation adjustment) total 36 2. by Shanghai City resident standardized training Committee big surgical training working group organization related theory class lecture. Three, training contents and requirements (a) General Surgery 1. Rotary objective: disinfection and aseptic techniques, water and electrolyte balance PUMA彪马运动鞋尺码对照表美国码/US 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5英国码/UK 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5欧码/EUR 36 37 37.5 38 38.5 39 40 40.5 41 42 42.5 43 44 44.5 45厘米/MM 225 230 235 240 245 250 255 260 265 270 275 280 285 290 295 medical students and junior doctors to complete tasks, with clinical research and paper writing ability, professional foreign language proficiency required to read foreign literature, as well as at higher levels under the guidance of doctors completing more complex surgery. Second, training method 1. training for 3 years. Trained in surgical sub specialties Web learning. Rotary Department time (months) Generalsurgical 15 (including in superior physician guide Xia general surgical outpatient 3 months) orthopedic 6 (including in superior physician guide Xia orthopedic outpatient 1 months) urinary surgical 3 heart surgical 3 neural surgical 3 anesthesia section 2 surgical heavy syndrome guardianship treatment room (SICU) 1 surgical emergency 3 (in principle General outside 2 months, orthopedic 1 months, the hospital can according to specific situation adjustment) total 36 2. by Shanghai City resident standardized training Committee big surgical training working group organization related theory class lecture. Three, training contents and requirements (a) General Surgery 1. Rotary objective: disinfection and aseptic techniques, water and electrolyte balance 纽巴伦/新百伦/New Balance 男款运动鞋尺码对照表美国码/US 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 欧码/EUR 38.5 39.5 40 40.5 41.5 42 42.5 43 44 44.5 45 厘米/MM 240 245 250 255 260 265 270 275 280 285 290纽巴伦/新百伦/New Balance 女款运动鞋尺码对照表美国码/US 5 5.5 6 6.5 7 7.5 8 8.5 欧码/EUR 35.5 36 36.5 37 37.5 38.5 39 40 厘米/MM 22.0 22.5 23.0 23.5 24.0 24.5 25.0 25.5medical students and junior doctors to complete tasks, with clinical research and paper writing ability, professional foreign language proficiency required to read foreign literature, as well as at higher levels under the guidance of doctors completing more complex surgery. Second, training method 1. training for 3 years. Trained in surgical sub specialties Web learning. Rotary Department time (months) General surgical 15 (including in superior physician guide Xia general surgicaloutpatient 3 months) orthopedic 6 (including in superior physician guide Xia orthopedic outpatient 1 months) urinary surgical 3 heart surgical 3 neural surgical 3 anesthesia section 2 surgical heavy syndrome guardianship treatment room (SICU) 1 surgical emergency 3 (in principle General outside 2 months, orthopedic 1 months, the hospital can according to specific situation adjustment) total 36 2. by Shanghai City resident standardized training Committee big surgical training working group organization related theory class lecture. Three, training contents and requirements (a) General Surgery 1. Rotary objective: disinfection and aseptic techniques, water and electrolyte balance 阿迪达斯篮球鞋实际标注美码U.S 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 英码U.K 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10 1/2 11 法(欧)码F.R 38.6 39.3 40 40. 41.3 42 42.6 43.3 44 44.6 45.6 46 日码J.P 240 245 250 255 260 265 270 275 280 285 290 295 中国码CHN 235 240 245 250 255 260 265 265 270 275 280 285 李宁篮球鞋男式尺码对照表美国码(US) 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12 法国码(FR) 39 39.5 40 41 41.5 42 43 43.5 44 45 45.5 46 中国码(MM) 240 245 250 255 260 265 270 275 280 285 290 295安踏篮球鞋通用尺码对照表欧洲码(EUR) 36 37 38 39 40 41 42 43 44 45 46 中国码(MM) 230 235 240 245 250 255 260 265 270 280 285medical students and junior doctors to complete tasks, with clinical research and paper writing ability, professional foreign languageproficiency required to read foreign literature, as well as at higher levels under the guidance of doctors completing more complex surgery. Second, training method 1. training for 3 years. Trained in surgical sub specialties Web learning. Rotary Department time (months) General surgical 15 (including in superior physician guide Xia general surgical outpatient 3 months) orthopedic 6 (including in superior physician guide Xia orthopedic outpatient 1 months) urinary surgical 3 heart surgical 3 neural surgical 3 anesthesia section 2 surgical heavy syndrome guardianship treatment room (SICU) 1 surgical emergency 3 (in principle General outside 2 months, orthopedic 1 months, the hospital can according to specific situation adjustment) total 36 2. by Shanghai City resident standardized training Committee big surgical training working group organization related theory class lecture. Three, training contents and requirements (a) General Surgery 1. Rotary objective: disinfection and aseptic techniques, water and electrolyte balance Nike 篮球鞋男式尺码对照表美国码(US) 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12 中国码(MM) 235 240 245 250 255 260 265 270 275 280 285 290 295 300 欧洲码(EUR) 38 38.5 39 40 40.5 41 42 42.5 43 44 44.5 45 45.5 46目前中国大陆市场上的鞋被要求全部标注新鞋号。