油茶采摘机械手的机构设计毕业设计
油茶果采摘机采摘机械臂的机构设计及运动仿真
虑 到底 盘的动 力情 况 , 采摘 臂 在 运 动 过程 中采用 液
油茶果采 摘机 在油 茶林 内有很好 的通过性 。油茶 果 采 摘臂 是油茶 果采摘 机 的工作机 构 , 安装在 底 盘上 , 结 合油茶 果树 冠形 状 和 种植 特 点 , 求 采摘 臂 有 比 要 较 大 的活动空 间 , 在采 摘 油茶 果 时能 方便 的接 近 油 茶 树 , 油茶果 采摘 下来 , 当采 摘机 在穿越 油茶 林 把 而 或 者在不 工作 时要 求 采摘 臂 占用 的空 间小 , 以保 证 采摘 机在 油茶林 地 的通过性 。
采摘机器人机械手结构设计与分析
采摘机器人机械手结构设计与分析一、本文概述1、采摘机器人的研究背景和意义随着农业技术的快速发展和人口老龄化的加剧,传统的人工采摘方式已经难以满足现代农业生产的需求。
采摘机器人作为一种新型的农业机械设备,具有高效、精准、省时省力等优点,正逐渐成为农业领域的研究热点。
采摘机器人的研究和应用,不仅可以提高农作物的采摘效率和质量,降低人工成本,还可以改善农民的工作环境和条件,推动农业现代化的进程。
机械手作为采摘机器人的核心部件,其结构设计直接影响到采摘机器人的性能和稳定性。
因此,对采摘机器人机械手结构的设计与分析显得尤为重要。
通过对采摘机器人机械手结构的研究,可以深入了解其运动特性、受力情况和优化方案,从而提高采摘机器人的采摘效率和准确性,推动采摘机器人在农业生产中的广泛应用。
这也为农业机械化、智能化和自动化的发展提供了重要的技术支撑和理论基础。
研究采摘机器人机械手结构设计与分析具有重要的理论意义和实践价值,对于推动农业现代化和提高农业生产效益具有重要意义。
2、机械手在采摘机器人中的重要作用在采摘机器人中,机械手的作用至关重要。
作为采摘机器人的核心部件之一,机械手负责直接与目标农作物进行交互,完成识别、抓取、剪切和放置等一系列复杂动作。
这些动作的成功执行,直接决定了采摘机器人的工作效率、采摘质量和适应性。
机械手的设计直接决定了采摘机器人的工作能力。
通过合理的结构设计,机械手可以适应不同形状、大小和成熟度的农作物,实现精准、高效的采摘。
机械手的运动轨迹和速度控制也是影响采摘效率的关键因素。
因此,对机械手的精确控制是实现高效采摘的关键。
机械手的性能直接影响到采摘机器人的采摘质量。
在采摘过程中,机械手需要保持稳定的抓取力度,避免对农作物造成损伤。
同时,机械手还需要具备足够的灵活性和精度,以确保能够准确地将农作物采摘下来。
这些要求都对机械手的设计和制造提出了极高的挑战。
机械手的适应性也是采摘机器人性能的重要评价指标。
毕业设计(论文)-多臂采摘机器人的初步设计采摘手的设计(全套图纸)
多臂采摘机器人的初步设计——采摘手的设计1.绪论1.1研究内容及意义果蔬采摘是农业生产链中最耗时耗力的一个环节,其成本高、季节性强、需要大量劳动力高强度的工作。
但是由于工业生产的迅速发展分流了大量农业劳动力以及人口老龄化加剧等原因,使得能够从事农业生产的劳动力越来越少,单靠人工劳作已经不能满足现有的需要。
随着计算机图像处理技术和各种智能控制理论的发展,使采用机器人采摘果蔬成为可能。
果蔬采摘机器人是一类针对水果和蔬菜, 可以通过编程来完成采摘等相关作业任务的具有感知能力的自动化机械收获系统, 是集机械、电子、信息、智能技术、计算机科学、农业和生物等学科于一体的交叉边缘性科学, 需要涉及机械结构、视觉图像处理、机器人运动学动力学、传感器技术、控制技术以及计算信息处理等多方面学科领域知识。
采摘机器人将在解决劳动力不足、降低工人劳动强度、提高工人劳动舒适性、减轻农业化肥和农药对人体的危害、提高采摘果蔬的质量、降低采摘成本、提高劳动生产率、保证果蔬的适时采收、提高产品的国际竞争力等方面具有很大潜力。
国际上, 一些以日本和美国为代表的发达国家,已经从20世纪80年代开始研究采摘机器人,并取得了一些成果。
而我国在该领域中的研究还处于起步阶段,因此我们必须加快对采摘机器人的研究脚步以早日赶超国际水平,使其为我国农业的生产和发展做出重大贡献。
全套图纸,加1538937061.2研究现状果蔬采摘机器人的研究开始于20 世纪60 年代的美国( 1968 年),采用的收获方式主要是机械震摇式和气动震摇式。
其缺点是果实易损、效率不高,特别是无法进行选择性的收获,在采摘柔软、新鲜的果蔬方面还存在很大的局限性。
但在此后,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,采摘机器人的研究和开发技术得到了快速的发展。
1.2.1国外研究现状在日本、美国等发达国家,农业人口较少。
随着农业生产向规模化、多样化、精确化的方向迈进,劳动力不足的现象越来越明显。
气吸式油茶果采摘机构设计
目录摘要 (1)Abstract (2)1 绪论 (3)1.1气吸式油茶果实采摘机构的技术背景 (3)2 气吸式油茶果实采摘机械原理 (4)2.1气吸式油茶果实采摘机械原理分析 (4)2.1.1果实采摘方式的选择 (4)2.1.2 气吸式油茶果实采摘机械原理简述 (4)2.2气吸式油茶果采摘机械装配图分析 (5)2.2.1 气吸式油茶果实采摘机械总装配图 (5)2.2.2 气吸式油茶果实采摘机械三维装配图: (5)3.气吸式油茶果采摘机构部装图 (6)3.1气吸式油茶采摘机构头部部装图: (6)3.2气吸式油茶果实采摘机械可伸缩机构、拉杆组件装配图及其三维图: (7)3.3电动机的选型 (10)4. 气吸式油茶果实采摘机构前景及总结 (12)4.1 气吸式油茶果实采摘产品前景 (12)4.2气吸式油茶果实采摘机械总结 (13)参考文献 (14)致谢 (15)摘要本课题运用制图软件对油茶果实采摘器进行机构设计,便携式采摘机械是一种为解决人们采摘高处果实难而创新设计的工具。
包括采摘机构、可伸缩杆机构、真空负压装置、电机正反转复位机构和齿轮传动机构并用Pro/e软件绘制了机构的三维图以助理解。
便携式油茶果实采摘机构主要采用了齿轮传动机构和铝合金管可伸缩机构,采摘高度范围、省力、伸缩长短均可调节,采摘较灵活效率高,不会对枝条和花蕾造成伤害,铝合金管可伸缩机构又使其质量较轻,便于携带,经投产和改进后可望解决农民朋友油茶及直径相近果实的采摘难题,市场前景广阔。
关键词:油茶果实;采摘;便携式;气吸式AbstractThis subject is to use mapping software fruit picking heads was camellia mechanism design, picking machinery is a portable solution for people picking fruit difficult and innovative design height of tools. Including: picking institutions, clamping device and manual control wire cable for dynamic force, cylindrical compression spring collection agencies reset. Make casting 3d drawing using Pro/e software to simulate the best Angle picking, avoid the fruit size limits, picking height range can be adjusted, picking a flexible, high efficiency, easy to carry, solve the problem, picking fruit market prospect.Key words: Camellia fruit ;picking; Portable; design1 绪论1.1气吸式油茶果实采摘机构的技术背景我国是一个油茶种植大国,全国14个油茶主产省区现有2.6亿亩宜林地(江西、湖南两省分布最多),其中相当一部分适宜种植油茶。
多功能抓取机械手的设计 毕业设计
设计一个多功能抓取机械手作为毕业设计是一个很有挑战性和创新性的课题。
以下是你可以考虑的一些建议和步骤:1. 项目背景和需求分析:-确定多功能抓取机械手的应用领域和具体需求,例如工业自动化、物流仓储等。
-分析市场上已有的类似产品,找出它们的优缺点,为设计提供参考。
2. 功能设计:-确定多功能抓取机械手需要具备的功能,如夹取、旋转、升降等。
-考虑集成传感器、视觉系统等技术,实现自动化控制和智能识别功能。
3. 机械结构设计:-设计机械手的结构,包括关节、连杆、末端执行器等部件,确保机械手具有足够的稳定性和灵活性。
-考虑采用轻量化材料和结构优化,以提高机械手的运动速度和精度。
4. 控制系统设计:-设计控制系统,选择合适的控制器和执行器,实现对机械手各部件的精准控制。
-考虑采用开放式控制系统,支持不同传感器和通讯接口的集成。
5. 电气系统设计:-设计电路板和电气布线,确保机械手的电气系统稳定可靠。
-考虑安全性设计,包括过载保护、紧急停止等功能。
6. 软件编程:-编写控制程序和用户界面,实现机械手的操作和监控。
-考虑采用先进的编程语言和算法,提高机械手的智能化水平。
7. 性能测试与优化:-进行多功能抓取机械手的性能测试,包括速度、精度、负载能力等指标。
-根据测试结果进行优化,提高机械手的性能和稳定性。
8. 报告撰写与展示:-撰写毕业设计报告,详细记录设计过程、方法和结果。
-准备设计成果的展示材料,向指导老师和评委展示你的设计成果和创新之处。
通过以上设计步骤和细致的实施,你可以完成一份出色的多功能抓取机械手毕业设计,并展示你在机械设计、控制技术和创新思维方面的能力和成就。
祝你顺利完成毕业设计!。
毕业设计采摘机械手
设计一个采摘机械手作为毕业设计是一个有趣和有挑战的项目。
以下是一个简要的设计方案:
1. 目标与需求分析:
-目标:设计一个能够自动采摘果实的机械手,提高采摘效率和减轻劳动强度。
-需求:机械手应具备准确的定位能力、稳定的抓取力度,并适应不同类型的果实。
2. 机械结构设计:
-手臂结构:选择合适的关节设计,使机械手具备较大的工作范围和灵活性。
-抓取器设计:根据果实的形状和大小,设计合适的抓取器,如夹爪、吸盘或夹子等,以确保稳定和安全地抓取果实。
3. 控制系统设计:
-定位系统:使用视觉传感器或激光测距仪等装置,实时识别果实的位置和姿态,并将数据传输给控制系统。
-运动控制:根据定位系统提供的数据,通过电动驱动或气动驱动等方式,控制机械手的运动,实现精确定位和抓取。
4. 自动化控制设计:
-控制算法:设计合适的算法,用于判断果实的成熟度、确定最佳采摘时机,并控制机械手的动作。
-用户界面:设计一个友好的用户界面,方便操作员监控和调整机械手的工作参数。
5. 安全性与可靠性设计:
-安全保护:考虑在机械手上安装传感器,如碰撞传感器或力传感器,以避免对果实和操作人员造成损害。
-可靠性测试:进行系统测试和验证,确保机械手在连续工作中的稳定性和可靠性。
6. 性能评估与改进:
-进行实地测试和评估机械手的采摘效率、准确性和稳定性。
-根据实际使用情况,收集反馈意见并进行改进,优化机械手的设计和性能。
以上是一个初步的设计方案,具体实施过程中需要根据自身的条件和资源对细节进行调整和完善。
另外,为确保设计的可行性和安全性,建议与导师和相关专业人士进行深入讨论和指导。
机械毕业设计1617油茶果剥壳机设计
本科毕业设计题目油茶果剥壳机设计学院:工学院姓名:学号:专业:机械设计制造及其自动化年级:指导教师:二0一四年五月摘要摘要:通过对油茶果的特点进行分析,并根据其果壳为木质化的特点。
油茶果脱壳机为柔性挤压,从而达到脱壳的目的,种子剥壳能力和技术要求符合本文提出的参数,通过验证试验样机能够满足实际生产的工艺及要求。
关键词:油茶果;脱壳机;Pro/E;AbstractAbstract: Based on the analysis of characteristics of Camellia oleiferafruit,and according to its nutlet lignification.when the fruit into hulling machine of the flexible extrusion,so as to achieve the purpose of shell,seed separation.production capacity and technical parameters of Camelliaoleiferahulling machine proposed in this paper,through the verification test prototype can satisfy the actual production process and requirements.Keywords:Camellia oleifera fruit;hulling machine;pro/e目录摘要 (1)Abstract (2)1 引言 (4)2 油茶果的特性及剥壳试验 (5)2.1 油茶果的特性 (5)2.2 油茶果的剥壳试验 (6)3 剥壳机的主要结构和工作原理 (6)3.1 剥壳机的主要结构 (6)3.2 剥壳机的工作原理 (7)4 剥壳机的主要参数确定及主要结构设计 (7)4.1 动力机的选择 (8)4.2 剥壳杆的设计 (8)4.3 传动带的设计计算 ........................... 错误!未定义书签。
便携式油茶果实采收机构设计
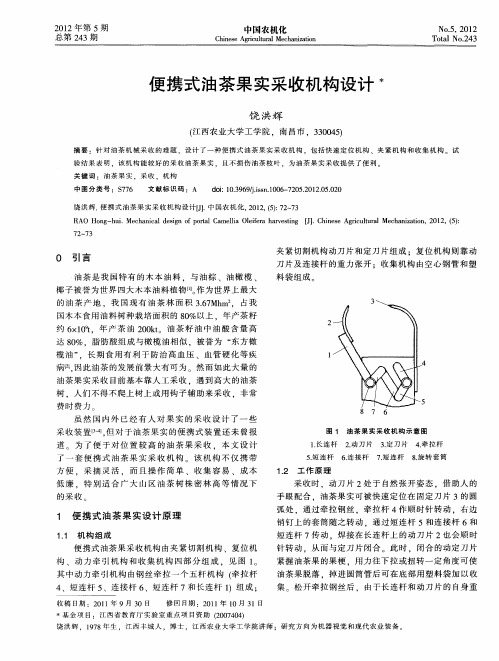
表 1 便 携 式 油 茶 机 构 相 关 参 数
图 9 油 茶 果 实 采收 图
3 结 论
为 了便 于高位 置 油茶果 实 的采 收 .设 计 了一 套便 携 式 油 茶果 实采 收装 置 .该 装 置 包 括 快 速定 位 装 置 .
夹 紧装 置 。切 割装 置 和收集 装 置组 成 。实 验 表 明 .该
图 1 油 茶 果 实 采 收机 构 示 意 图 1 连杆 . 长 5短 连 杆 . 2动 刀 片 3定 刀 片 . . 6连 接 杆 . 7短 连 杆 . 4牵 拉 杆 . 8旋转 套 筒 .
1 . 工 作 原 理 2
低 廉 .特 别 适 合 广 大 山 区 油 茶 树 株 密 林 高 等 情 况 下
装 置 能较好 完 成油 茶 的采摘 和 收集 .且 不 损伤 油茶 枝
叶 .对 于人 工采摘 能起 到 省时 省力 的作用 .其 中有 些
装置 如钢 索增 力 装置 和钢 管本 身还 可 以作 伸 缩方 面 的
改 进
参 考 文 献
【】 素 梅 , 强 . 国茶 籽 资 源 的 开 发 利 用 及 前 景 分 析【】 中 国 l周 王 我 J .
摘 要 :针 对 油 茶 机 械 采 收 的难 题 ,设 计 了 一 种便 携 式 油 茶 果 实 采 收机 构 ,包 括 快 速定 位 机 构 、夹 紧 机 构 和 收 集 机 构 。 试
验结 果 表 明 ,该 机 构 能 较好 的采 收 油 茶 果 实 ,且 不 损 伤 油 茶 枝 叶 ,为油 茶 果 实 采 收提 供 了便 利 。 关 键 词 :油茶 果 实 ,采 收 ,机构
农 业 工 程 学 报 , 0 4 2 () 3 ~ 2 2 0 , O5: 8 4 .
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
19
Байду номын сангаас
油茶采摘机械手的机构设计
学 院: 工学院 班 级: 机制051 姓 名: 缪伟 导 师: 饶洪辉
可整理ppt
江西农业大学工学院
1
设计内容
1、前言 2、油茶采摘机械手的原理图 3、油茶采摘机械手的设计与选型 4、油茶采摘机械手的PLC程序控制系统
可整理ppt
江西农业大学工学院
2
1、前 言
采用人工油茶采摘,消耗的人力、时间比较 大,采摘效率低,并且某些油茶难以采摘或采摘不 到,对人体安全具有一定的威胁。采用油茶采摘机 械手,可通过智能移动平台,通过摄像头、传感器 捕捉油茶,可实现持续的、高效率的、安全的作业。
8
3.3.1、气压缸升降装置
1、选用QGA-50型气缸 选取气缸行程为374mm
2、采用双列梯形槽导轨 实现升降滑动运动
可整理ppt
江西农业大学工学院
9
3.3.2、气压缸摆臂装置
1、选用QGA-50型气压缸 选取气缸行程为128mm
2、根据两气缸轴心距108mm 采用菱形四杆机构实现 摆臂沿水平线上下摆动30º
1、90SL55型伺服电动机
输出功率25W 空载转速2700r/min
2、70BF1-3型反应式步进电动机
步距1.5º 额定负载起动频率1000步/s
3、36SL5E2型伺服电动机
输出功率1W 空载转速2700r/min
可整理ppt
江西农业大学工学院
7
3.2、旋转减速装置
10
可整理ppt
江西农业大学工学院
可整理ppt
江西农业大学工学院
10
3.4.1、手抓装置
可整理ppt
江西农业大学工学院
11
3.4.2、手抓结构装置
手抓工作原理步骤:起动70BF1-3步进电动机,带动丝杆转动, 滑块在丝杆经导杆自由滑动;内手抓钣金片通过滑块圆柱台阶推 动快速夹紧油茶,随后外手抓钣金片通过滑块锥形轨迹夹紧油茶 枝条,通过时间继电器经过t=4s步进电动机停止;夹紧后内手抓 装置通过36SL5E2伺服电动机自转,实现在油茶枝条固定的同时油 茶自转脱落的功能。
可整理ppt
江西农业大学工学院
12
4、PLC程序控制系统
4.1、主电路 4.2、PLC控制路线 4.3、梯形图 4.4、指令语句表
可整理ppt
江西农业大学工学院
13
4.1
主 电 路
可整理ppt
江西农业大学工学院
14
4.2
PLC 控 制 线 路
可整理ppt
江西农业大学工学院
15
4.3
梯 形 图
可整理ppt
江西农业大学工学院
16
4.4
指 令 语 句 表
可整理ppt
江西农业大学工学院
17
总结
通过本次毕业设计,感受颇多。在设计过程 中学到了很多知识,更重要的是发现还有很多东西 自己还要去学习。
欢迎各位评委老师对本设计进行评审,设计 不足之处请给予批评指正。
可整理ppt
18
谢 谢!
可整理ppt
可整理ppt
江西农业大学工学院
3
2.1、总装图
可整理ppt
江西农业大学工学院
4
2.2、油茶采摘机械手的原理图
可整理ppt
江西农业大学工学院
5
3、油茶采摘机械手的设计与选型
3.1、电动机的选型 3.2、旋转减速装置 3.3、气压缸升降、摆臂装置 3.4、手抓装置
可整理ppt
江西农业大学工学院
6
3.1、电动机的选型