《先进飞行控系统》第十六课
飞行操纵系统-自己整理

目录ATA27-飞控系统 (2)1.飞机操纵系统包括哪几部分? (2)2.飞机的重要操纵面,各操纵什么运动? (2)3.操纵系统的分类及各自特点? (2)4.飞行操纵系统的要求? (3)5.软式传动与硬式传动优缺点? (3)6.钢索使用中的主要故障有哪些?如何彻底检查?(豆) (4)7.什么是钢索的“弹性间隙”,有什么危害?简述飞机操纵系统中减少“弹性间隙”采用的方法及其原因。
(豆) (4)8.导致软性传动机构操纵灵敏性差的主要原因是什么?如何解决?(豆) (4)9.软式传动操纵灵敏性变差的原因,如何解决。
(上一题不够的话,加上这题) (4)10.简述钢索导向装置有哪些,分别是什么作用?(豆) (4)11.软式传动机构的主要构件及其作用是什么?(豆) (4)12.对于简单机械操纵系统,什么是传动系数?其含义是什么?并对操纵系统传动系数的大小特性进行对比分析。
(豆) (5)13.为什么采用非线性传动机构操纵系统? (5)14.四余度系统的组成和功能? (5)15.以典型的四余度系统为例,简述电传操纵系统中的余度管理形式?// 多重系统也称余度系统,系统应满足哪三个条件? (6)16.余度系统每个通道中,信号选择器以及监控器与切换装置的主要作用是什么?(豆)717.在具有A、B、C、D四套电传操纵的四余度系统中,假设C套的杆力传感器和D套的舵回路同时出现故障,系统能否工作?如何工作?(豆) (7)18.电传系统优缺点? (7)19.液压助力器的原理? (7)20.平衡片和调整片的作用? (8)21.在操纵系统的助力驱动装置中,液压和电动驱动装置分别用在什么地方?为什么?(豆) (8)22.水平安定面配平 (8)23.简述飞机的横向操纵。
(8)24.根据附图,简述并列式柔性互联驾驶盘机构的工作情况。
(豆) (9)25.简述什么是副翼反向偏航,以及在副翼设计上可以用来防止副翼反向偏航的措施。
(豆)926.说明副翼感觉定中凸轮机构如何产生感觉力?在副翼配平操纵中如何工作?(豆)1027.输出扭力管的特点? (10)28.升降舵载荷感觉定中机构的特点? (11)29.根据附图,简述升降舵感觉定中机构的工作原理。
精编《先进飞行控制系统》第二课资料

第二节课(20121019)
复习第一节课内容
飞机的组成
飞机具有机身、机翼、动力装置、起落架和稳定操纵机 构等几个主要部分组成。机身是飞机的躯体,它将机翼、尾 翼、动力装置、起落架等部件连成一个整体,构成飞机。
复习第一节课内容
复习第一节课内容
自动飞行控制系统
敏感元件 敏感元件 敏感元件
y1
sin
cos
0
yg
Yg z1 0
0 1 zg
Y1
2.1.2 飞机的运动参数
X1 cos
Y1
sin
Z1 0
sin cos
0
0 0 1
X
g
Yg
Z
g
运动。 静稳定性:扰动停止的最初瞬间,运动参数变化的趋势 因为解算动稳定性比较复杂,所以提出静稳定性。
2.1.4 稳定性和操纵性概念
2)操纵性 飞机以相应的运动,回答驾驶员操纵各操纵机构的能力 操纵性是指如何操纵飞机,易操纵的程度,操纵力如何
及飞机对操纵响应快慢,通俗地说即飞机是否好用。 操纵性与稳定性是与飞机结构参数,气动特性(控制
标OgYg表示侧向偏离。 • 立轴OgZg:垂直地面指向地心,坐标OgZg表示飞行高度
xg
og
yg
zg
图2-1 地面坐标系
2)机体轴系(体轴系) Sb-oxyz
• 原点o:在飞机质心处,坐标系与飞机固连。 • 纵轴ox:在飞机对称平面内,与飞机设计轴线平行,指
向前方(机头)。 • 横轴oy:垂直飞机对称平面指向右方。 • 立轴oz:在飞机对称平面内,且垂直于ox轴指向机身下
《飞行操纵系统》课件

THANKS
感谢观看
飞行员通过Байду номын сангаас纵杆、脚蹬等输入装置 ,将控制指令传递给飞行操纵系统, 以改变飞机的飞行姿态和轨迹。
它包括主操纵系统和辅助操纵系统, 主操纵系统包括升降舵、方向舵和副 翼,辅助操纵系统包括襟翼、缝翼和 起落架收放机构等。
飞行操纵系统的动力学基础
飞行操纵系统的动力学基础包 括空气动力学和飞行力学。
空气动力学是研究气体流动和 物体在气体中运动的科学,它 为飞行操纵系统的设计和性能 提供了理论基础。
分类
根据飞行器类型和设计需求的不同,飞行操纵系统有多种分类方式。例如,按照传力介质的不同,可以分为机械 式操纵系统、液压式操纵系统和电气式操纵系统等;按照控制方式的不同,可以分为助力操纵系统和主动控制系 统等。
发展历程与趋势
发展历程
飞行操纵系统的发展经历了多个阶段,从早期的机械操纵系统到现代的电传操纵系统和 主动控制系统。随着科技的不断进步,飞行操纵系统的性能和安全性得到了极大的提升
权限管理与安全认证
限制飞行员对系统的操作权限,防止误操作或 恶意干扰。
自适应容错控制
在系统发生故障时,自动调整控制策略,降低故障对飞行安全的影响。
05
飞行操纵系统的应用与案例分析
飞行操纵系统在无人机中的应用
1 2 3
无人机飞行操纵系统概述
无人机飞行操纵系统是无人机控制的重要组成部 分,负责无人机的起飞、巡航、降落等操作。
飞行操纵系统的传感器
01
02
03
04
角位移传感器
检测飞行员的操纵角度,转换 为电信号。
力矩传感器
检测飞行员施加在操纵杆上的 力矩,转换为电信号。
侧杆传感器
F-16飞行操作

飞行基本操作如下:(Crtl = C, Alt = A, Shift = S 以下的都是这样简写阿)开启主引擎(加速)C + =关闭主引擎A + -水平左转,水平右转。
机头向上C + S + 小键盘的向下机头向下C + S + 小键盘的向上机身向左最大360度转圈C + S + 小键盘的向左机身向右最大360度转圈C + S + 小键盘的向右起落架的收/放g猫(1):飞行操作Cycle_botLft_MFD = [ 向前调节左下方的显示屏幕的显示模式Cycle_uppLft_MFD = SHF [ 向后调节左下方的显示屏幕的显示模式Cycle_botRgt_MFD = ] 向前调节右下方的显示屏幕的显示模式Cycle_uppRgt_MFD = SHF ] 向后调节右下方的显示屏幕的显示模式Break_lock = KP. 持续打开减速板(小键盘的"."键)Open_Speed_brake = SHF b 打开地面刹车Close_spd_brake = CTL b 关闭地面刹车Cycle_Nav_modes = \ 切换导航模式SpeedBrakeToggle = b 打开减速板EJECT = CTL e 弹射逃生************ 战斗chaff = x 放出雷达诱饵flare = z 放出红外诱饵chaff_flare_auto = ALT z 自动放出红外诱饵Pickle_weapon = SPC 发射武器Fire_gun = / 发射机炮Cycle_A-G_weapns = BSP 切换对地武器Cycle_A-A_weapon = ENT 切换对空武器MRM_mode = m 切换中程导弹工作模式Cycle_MSL_hardpt = SHF / 切换导弹的???Dogfight_OVRD = d 近距格斗模式Missile_OVRD = m 导弹攻击模式Cancel_OVRD = c 取消近距格斗/导弹攻击模式ACM_10x60 = CTL F8 集束BoB!!!投弹方式1ACM_Boresight = CTL F5 集束BoB!!!投弹方式2ACM_30x20 = CTL F6 集束BoB!!!投弹方式3ACM_Slewable = CTL F7 集束BoB!!!投弹方式4************ 雷达Radar_Stand_by = CTL r 雷达关机Designate_target = KP0 设定目标(小键盘"0"键)UNCAGE = u 取消目标?Cycle_A-G_radar = F2 对地雷达工作模式切换Cycle_A-A_radar = F1 对空雷达工作模式切换Cycle_RDRsubmode = F8 切换雷达工作子模式Decrease_rdr_rng = F3 缩小雷达搜索范围Increase_rdr_Rng = F4 增大雷达搜索范围Freeze_GM_RDR = F10 地形扫描雷达图像暂停RDR_Elevation_up = F7 雷达上视模式RDR_Elevation_dn = F5 雷达下视模式RDR_Elev_CENTER = F6 雷达正常水平模式Dec_radar_gain = SHF F3 减少雷达信号接收?Incr_radar_gain = SHF F4 增加雷达信号接收?Radar_bar_scan = SHF F8 雷达扫描方式?Rdr_azimuth = F8 雷达方位角探测?Dec_HSD_Range = F11 减少HSD工作距离?Inc_HSD_Range = F12 增加HSD工作距离?************ 视角glance_forward = KPENT 察看前方(小键盘"ENTER"键) Padlock_view = 4 察看机舱外面Ground_Map_FOV = F9 战场地图观察View_up = KP8 向上看View_Down = KP2 向下看View_Left = KP4 向左看View_Right = KP6 向右看Toggle_lights = SCRLCK 灯光调整Satellite_view = ` 鸟瞰视角Action_view = SHF ` 行动视角Hud_only_view = 1 只显示瞄准具2-D_cockpit = 2 2-D 的座舱显示Virtual_Cockpit = 3 虚拟座舱显示Extended_FOV = 5 扩展视角Tracking_view = 6 跟踪视角Incoming_view = 7 导弹飞近视角Friendly_view = 8 友军视角Weapon_view = SHF 7 武器挂载视角Friendly_GD_unit = SHF 8 地面友军目标Weapon_TRGT_view = ALT 7 目标视角Chase_view = 9 跟踪视角Flyby_view = SHF 9 飞行视角Orbit_view = 0 盘旋视角Manual_picth_ovr = o 人手调整机头显示区域?Toggle_SAB = SHF 3 调整SAB???************ 通信AW ACS_radio_comm = q 与预警机通信Wingman_radio_cm = w 与僚机通信Element_radio_cm = e ??无线电通信Flight_radio_com = r 飞行控制无线电通信Tower_Radio_comm = t 与地面指挥塔通信Tanker_Radio_com = y 与加油机通信Radio_Wilco = SHF y 答应接受无线电指示Chng_Radio_chanl = ALT y 改变无线电通道Radio_unable = SHF u 无线电关机Instr_mode_swtch = i 实时通信模式切换?Chat_in_multplay = SHF t 多人游戏交谈Shift_Ctrl_c Ckpit Open/close canopy 座舱罩开/关电门Shift_e Ckpit Arm ejection seat 弹射座椅同意拉柄(左前廊板)Alt_k Ckpit Kneeboard page 腿部记事本Alt_p Ckpit Parking brake 手煞车(左前廊板)Shift_/ Nose wheelsteering NWS 鼻轮转向开关G Ckpit Landing gear 起落架收放手柄(左前廊板)Alt_g Ckpit Alternate landing gear 起落架替用伸放拉柄(左前廊板)Shift_Ctrl_g Ckpit Reset alt gear extension 重置起落架替用伸放(左前廊板) K Ckpit Wheel brakes 机轮煞车(左前廊板)Shift_d Ckpit Deploy drag chute 阻力伞电门Ctrl_k Ckpit Hook 捕捉钩电门(左前廊板)WARNINGS 警告Ctrl_f Ckpit F-ACK 显示系统错误讯息(左眉板)Shift_Ctrl_Alt_w HUD Warning reset 重置警告讯息Ctrl_g Ckpit-Betty gear horn 将警告音响置于静音Ctrl_c Ckpit-Betty Master Caution 重置主警告灯(左眉板)Ctrl_v Ckpit-VMS Inhibit 关闭语音提示Alt_< Ckpit-ALOW altitude Dec 低高度Alt_> Ckpit-ALOW altitude IncJETTISON 抛掷Shift_c Ckpit-CAT I/III 猫I 猫III 切换(左前廊板)Ctrl_j Ckpit-Jettison all 全部挂戴抛掷电门(左前廊板)Alt_j Ckpit-Ground Jett enable 允许地面抛掷(左前廊板)Ctrl_e Ckpit-Eject 座椅弹射ENGINE/FUEL 发动机/燃油Alt_e Ckpit-EPU step 紧急动力单元电门(左中廊板)Shift_j Ckpit-JFS switch JFS电门(点火左中廊板)Shift_Ctrl_F1 Ckpit-Fuel switch Dec 燃油电门向左旋转(前下廊板)Shift_Ctrl_F2 Ckpti-Fuel switch Inc 燃油电门向右旋转(前下廊板)Shift_Ctrl_F3 Ckpit-Air Source Dec 气源向左旋转(右前廊板)Shift_Ctrl_F4 Ckpit-Air Source Inc 气源向右旋转(右前廊板)Shift_Ctrl_F5 Ckpit-Fuel Pump Switch Dec 燃油帮浦旋钮向左旋转(左中廊板) Shift_Ctrl_F6 Ckpit-Fuel Pump Switch Inc 燃油帮浦旋钮向右旋转(左中廊板) Shift_Ctrl_F7 Ckpit-Fuel Master Switch 主燃油旋钮(左中廊板)Shift_r Ckpit-Fuel Door 空中加油门电门(左中廊板)Alt_d Fuel dump 释放燃油ELECTRIC POWER 电子装备电源Ctrl_Alt_F1 Ckpit-Power Main Dec 主电源电门向上一段(左中廊板)Ctrl_Alt_F2 Ckpit-Power Main Inc 主电源电门向下一段(左中廊板)Shift_Alt_F1 Ckpit-Power TILS TILS电源开关Shift_Alt_F2 Ckpit-Power HUD HUD电源开关(右前廊板)Shift_Alt_F3 Ckpit-Power Left Hpt 左挂载点(右前廊板)Shift_Alt_F4 CkpitPower Right Hpt 右挂载点(右前廊板)Shift_Alt_F5 Ckpit-Power FCR FCR电源电门(右后廊板)Shift_Alt_F6 Ckpit-Power FCC FCC电源电门(右后廊板)Shift_Alt_F7 Ckpit-Power SMS SMS电源电门(右后廊板)Shift_Alt_F8 Ckpit-Power MFD MFD电源电门(右后廊板)Shift_Alt_F9 Ckpit-Power UFC UFC电源电门(右后廊板)Shift_Alt_F10 Ckpit-Power GPS GPS电源电门(右后廊板)Shift_Alt_F11 Ckpit-Power Datalink 数据链路电源电门(右后廊板)Shift_Alt_F12 Ckpit-Power MAP MAP电源开关(右后廊板)Ctrl_Alt_F7 Ckpit-INS Dec INS旋钮向左旋转(右后廊板)Ctrl_Alt_F8 Ckpit-INS Inc ISN旋钮向右旋转(右后廊板)Alt_a Radar Altimeter OFF 关闭雷达高度计(右中廊板)Ctrl_a Radar Altimeter STDBY 雷达高度计待命(右中廊板)Shift_a Radar Altimeter ON 开启雷达高度计(右中廊板)ACMIF Ckpit-AVTR 录像开关(左中廊板)Alt_f Ckpit-AVTR Switch 录像开关(左中廊板)FLIGHT CONTROLS 飞操系Shift_Ctrl_↑Ctrls-Nose down 机鼻下2010-12-14 21:16 回复9点の太阳0位粉丝37楼Shift_Ctrl_↓Ctrls-Nose up 机鼻上Shift_Ctrl_←Roll left 左滚转Shift_Ctrl_→Roll right 右滚转< Rudder left 方向舵左> Rudder right 方向舵右= Throttle forward 油门前推- Throttle back 收油门Shift_= throttle up 油门以10为单位向前Shift_- Step throttle down 油门以10为单位向后Ctrl_= Full afterburner 后燃器全开Ctrl_- Min Afterburner 最小后燃器动力Alt_- Throttle idle 节流阀回到怠转Alt_i Throttle idle detent 油门手柄板机销Shift_←Trim Aileron left 左副翼配平Shift_→Trim Aileron right 右副翼配平Alt_↑Trim Elevator down 水平尾配平下Alt_↓Trim Elevator up 水平尾配平上Alt_←Trim Rudder left 方向舵配平左Alt_→Trim Rudder right 方向舵配平右Shift_↑Trim Reset 配平定中Ctrl_4 Trim AP Disc 自动驾驶配平Shift_Alt_End Trim Manual nose down 手动配平机鼻下Shift_Alt_Home Trim Manual nose up 手动配平机鼻上Shift_Alt_PgDn Trim Manual roll left 手动配平向左滚转Shift_Alt_Delete Trim Manual roll right 手动配平向右滚转Shift_Alt_Insert Trim Manual yaw left 手动配平向左偏航Shift_Alt_PgUp Trim Manual yaw right 手动配平向右偏航B Ckpit-Air brakes toggle 空气煞车开关Shift_b Ckpit-Air brakes open 空气煞车打开Ctrl_b Ckpit-Air brakes close 空气煞车关闭Ctrl_F11 Flaps Decrease 襟翼减少Alt_F11 Flaps Decrease LEFs 前缘襟翼减少Ctrl_F12 Flaps Increase 襟翼减少Alt_F12 Flaps Increase LEFs 前缘襟翼增加Ctrl_5 Flaps Lock LEFs 锁定前缘襟翼Alt_F10 Flaps Set LEFs to full 前缘襟翼全开Alt_F9 Flaps Set LEF to null 前缘襟翼全关Ctrl_F10 Flaps Set to full 襟翼全开Ctrl_F9 Flaps Set to null 襟翼全关A Ckpit-Autopilot 自动飞行Ctrl_1 Ckpit-AP Switch Left 自动飞行左方开关Ctrl_2 Ckpit-AP Switch Right 自动飞行右方开关Ctrl_3 Ckpit-AP Override 自动飞行跨越电门O Ckpit-Manual pitch override 手动俯仰跨越电门DEFENSIVE SYSTEMS 防御系统Shift_PageDn RWR Handoff 交接钮Home RWR Low 低空威胁优先权Shift_PageUp RWR Naval 海军威胁优先权Insert RWR Priority RWR显示优先权Shift_Insert RWR Search 显示搜寻雷达PageUp RWR Target Separate 目标分离Shift_Home RWR Unknown 显示不明目标来源Ctrl_Alt_F3 EWS Chaff Power EWS干扰丝开启电门(左廊板) Ctrl_Alt_F4 EWS Flare Power EWS火焰弹开启电门(左廊板) Ctrl_Alt_F5 EWS Jammer Power 启动干扰丝火焰弹干扰电源Ctrl_Alt_F6 EWS RWR Power EWS RWR电源开关Shift_z EWS PGM Dec EWS PGM向左旋转Shift_x EWS PGM Inc EWS PGM向右旋转Shift_q EWS Program Dec EWS 向左旋转Shift_w EWS Program Inc EWS 向右旋转J ECM 电战夹舱启动电门X Ckpit-Drop chaff 释放干扰丝Z Ckpit-Drop flare 释放火焰弹Alt_z Chaff/Flare auto/manual 干扰丝/火焰弹自动或手动NA VIGATION 导航S Ckpit-Next Steerpoint 下个导航点Shift_s Ckpit-Previous Steerpoint 上个导航点F11 HSD range decrease HSD显示范围缩小(MFD中)F12 HSD range increase HSD显示范围增加(MFD中)I HIS Modes toggle HSI模式切换Ctrl_Alt_v HSI Course decrement HSI航向减少Ctrl_Alt_b HSI Course increment HSI航向增加Ctrl_Alt_n HSI Heading decrement HSI标点减少Ctrl_Alt_m HSI Heading increment HSI标点增加。
先进飞行控制系统》第(6)

a)独立的侧向控制系统控制律:
将控制信号分别加入自动驾驶仪的滚转和航向两个通道,建
立滚转角与转弯角速度同时,在航向通道引入 信号,以减
小侧滑。控制律为:
ra
I I K K
I ( g ) ( g ) K
2021/4/22
24
特点:
▪
可实现协调转弯,且只对
传统机械按键结构层图:
按
PCBA
键
开关 键
传统机械按键设计要点: 1.合理的选择按键的类型, 尽量选择平头类的按键,以 防按键下陷。 2.开关按键和塑胶按键设计 间隙建议留0.05~0.1mm, 以防按键死键。 3.要考虑成型工艺,合理计 算累积公差,以防按键手感 不良。
用非线性电路实现
非线性电路
▪ 由信号平衡知:a I ( - g ) 副0 翼右下左上
▪ 由力、力矩平衡可知:滚转力矩 L( a ) 飞0 机向左倾斜
0, ,0G重力分量产生的侧力 F,y 使0飞机空速
向量向左转(此时纵轴没转)当
I (与 g ) (I信 I)
号平衡时 a 。0在空速向左转时,出现 ,此0时
,偏航r 力 矩K K 使 0 轴转向应飞航L(向r ) 0 ox
修正航向过程中有侧滑角
控制律:
ra
I I I ( g ) K K 增稳阻尼作用
侧滑角 的闭环补偿方法-产生以后消除
2021/4/22
5
应飞
航向
X
V
(初始)
应飞 航向 V X
(过程中)
自动驾驶仪修正初始偏航角的过程
2021/4/22
6
物理解释:
设飞机航向发生偏离,出现 I(- g ) 0
垂直陀螺 U
F-16(二)——能量机动理论的践行者和“格斗之王”
F-16(二)——能量机动理论的践行者和“格斗之王”原创不易,请认可价值,本文为“今日头条英雄光”原创,转载请注明出处 2020-4-9上一篇重制版《战隼凶猛(一)》重点介绍了F-16的历史及其庞大的家族,这是一个比较复杂的过程,需要去考证不同的资料,花费不少时间,不过这样的文章也是有意义的,这篇《F-16(二)》正是在第一篇的基础上出现的。
F-16能量机动理论的践行者F-16的创始人博伊德是能量机动理论的创始人,战斗机黑手党之一,这些人一开始对F-X计划的设想是轻型的擅长格斗的能量战机,在理念不可能相融合的情况下,他们屡次妥协,最终使F-16通过和F-15高低搭配的多用途战机的形式诞生。
虽然F-16经过了妥协和牺牲,但是从机动能力上来看F-16其实还是保留了自身的核心思维:能量机动性以及跨音速机动能力。
我们从气动设计和机动能力的表现去简单探索一下F-16的能量机动性。
还是那句话,笔者自身存在局限性,文章中可能存在错误,欢迎评论区理智讨论。
F-16气动设计笔者在查阅了一些资料以后发现,F-16的气动设计一直在两个方面下手:1. 减重;2. 跨音速机动能力。
很好理解,作为轻型战机,减轻飞机自重,不仅能够提高作战效能,而且能够提高飞机推重比进而增加飞机的能量机动性。
注重跨音速机动能力也是十分正常的,因为自从F-4鬼怪这些二代机之后,三代机普遍从追求极速到了追求高亚/跨音速机动能力,F-16的前身LWF计划本身就是在试验轻型战斗机的中高空跨音速实战能力。
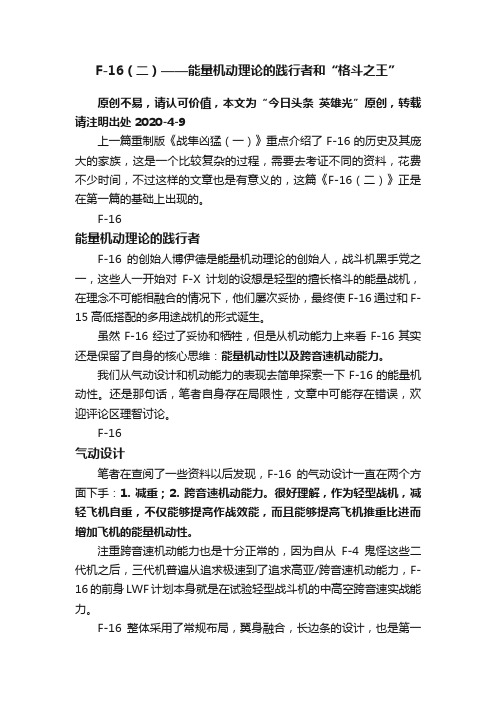
F-16整体采用了常规布局,翼身融合,长边条的设计,也是第一个采用电传飞控的服役战机,这些都为了上述两个方面。
(PS:F-16也是第一个采用边条翼服役的战机。
)F-16C block50的俯视图和侧视图•机翼设计从上面的三视图可以很明显的观察到,F-16的主翼是切尖三角翼,即三角翼的两端被切掉了。
笔者个人认为可能是为了防止高速下的震颤和抖动,而且翼尖也可以增加挂架来提高载弹量。
精选《先进飞行控制系统》第四课资料

(1)滚转力矩
侧滑角β 引起的滚转力矩
Y ( )
LA
(
)
Cl
(
1 2
V
2
)SW
b
Cl
Cl 为横滚静稳定性导数
L( )
Cl 0 时,飞机具有横滚静稳定性;
Cl 0 时,飞机为横滚静不稳定的。
P36图1-31有详细解释 (书上图有问题)
(1)滚转力矩
Cn 0,飞机具有稳定偏航力矩; Cn 0,飞机具有不稳定偏航力矩;
稳定的偏航力矩在 使侧滑角减小的同 时,却使机头转到 新的方向。因此, 稳定的偏航力矩只 是对速度轴向起稳 定作用,因此又称 为风标稳定性力矩
2.2.7 作用在飞机上的推力与重力
(1)发动机推力 (2)发动机的推力力矩 (3)重力G参见书P44 (4)不同坐标系下,力、力矩和速度的定义 参见书P44-45
Cme
ecA 2V
2.2.5 侧向气动力
侧力为飞机总的空气动力 R沿气流坐标系 ya轴的分量 向右为正。侧力Y可以表示为:
Y CY QSW
式中: CY为侧力系数; Sw为机翼参考面积。
侧滑角 ,方向舵偏转 r ,滚转角速度p以及偏航角速
度r都会引起侧力。 (不对称侧向气流才产生侧力)。
偏航力矩 N A (r ) 0
侧向气动力及力矩系数含义
CY 侧力系数;
CYr方向舵侧力系数;
Cl 横滚静稳定性导数; Cla滚转操纵导数;
Clr 操纵交叉导数;
Clp 滚转阻尼导数;
Clr 交叉动导数;
Cn航向静稳定性导数;
Cn
《先进飞行控系统》绪论

1967年10月16日徐克勤驾驶轰六 成功地投放氢弹
起飞重量 载弹量
73800 公斤 3000 公斤
最大 9000 公斤 巡航速度 最大航程 M 0.75 6000 公里
“飞豹” 歼击/轰炸机 我国自行研制的双 座、双发、多用途 全天候超声速歼击 轰炸机
1998年11月珠海航 空航天博览会上首 次公开亮相, 并作 了极为精彩的飞5/16、米格-29、苏-27 推重比8涡扇发动机
21世纪初
高性能的发动机使第三代战斗机具有优良的机动性
俄 罗 斯 苏 -27 在珠海航展 上的飞行表 演,表现出 第三代发动 机推重比高 的特点。
高性能的发动机使第三代战斗机具有优良的机动性
苏-27双机在珠海航 展上表演著名的“ 眼镜蛇”机动飞行 ,表现出第三代发 动机抗畸变能力强 (即泼辣性好)的 特点。
第一架飞机
1903年12月17日
莱特兄弟在技师泰勒的帮助下,自己动 手设计制造的活塞式汽油发动机 功率为12马力(长期)-16马力(短期) 重量约77公斤 为人类首次有动力、稳定、可操纵的持 续飞行提供了发动机,开创了人类飞行 的新纪元。
飞行者一号
莱特兄弟
喷气战斗机大致发展了四代
从20世纪40年代末到21世纪初,喷气战斗机及其发动机 已经历了四次更新换代,大致发展了四代。 典型特点 典型飞机 发动机 服役年代 第
机身:主要用来装载乘员、旅客、武器、货物和机载设备。 机翼:是飞机产生升力的主要部件,以支持飞机在空中飞行。 稳定操纵机构:包括水平尾翼、垂直尾翼、副翼、升降舵、 方向舵等几个主要部件,它用来维持飞机在空中飞行的稳定 和平衡,控制飞机的姿态和方向。
起落架:用于支撑飞行和进行起飞、着陆时的滑跑。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(3)运输机、轰炸机的扰动载荷控制
1)设计出发点:
考虑巡航性能(航程,载重)和结构性能(疲劳,寿命), 大型飞机经常需要长时间作过载的巡航飞行,所以设计时 设法改善巡航性能,因此设计时提出的要求是降低翼根弯 矩,减轻机翼结构重量,改善结构疲劳。
(2)设计思想和基本原理
在飞机设计中,希望机翼上的载荷有一个理想的分布规律, 从而降低翼根弯矩,减轻结构疲劳,延长飞机的寿命。
(适用于运输机、轰炸机)
从机动性上讲,也希望有一个理想的载荷分布,以获取最 小阻力特性和最大的升阻力。
(2)设计思想和基本原理
而在通常的飞机设计中,一般只能在平飞状态(过载= 1g)作出部分参数的优化设计,而对机动飞行,由于飞 行状态的不同,将使此种设计(结构上与机动性两者方面 的希望)难以实现,要想实现只有借助自动控制的方法。
(1)阵风减缓
1)阵风与过载
在大气中,经常有各个方向的气流,使得飞机在这 种不平静空气中飞行时产生过载。
u
V0
cos
过载与阵风的关系:
L L0 L,
nz
nz 1
L CL qS
1 (CL qS )
L0 L
G
G
C L qsV 0
u0G
1
振升力系数。
PS
(T D)u G
(b)飞机的单位(重量)的剩余功率 PS :
PS 大小可表示飞机加速度性能,单位(重量)剩余功率即
飞机在一定速度条件下的剩余功率以飞机重量,即:
(T D )u PS G
式中:T:发动机推力;G:飞机重量;D:飞机阻力;u: 飞行速度。 飞机剩余功率愈大,飞机的机动性愈好
按最小阻力和最大升阻比而设计的机动载荷控制方式,在
阵风干扰时会助长阵风过载反应,使阵风减载性能下降, 为解决这个问题,可使机动载荷控制中的 或信号 偿方法,可使模式相容性问题得到很好的解决
q
通过大惯性的滞后滤波器后再输入系统。采用较复杂的补
3)效益
用直接力CCV可衰减均方根阵风加速度30~41%,YF-16
结果:
使更多载荷分配到翼根区,使气动中心被迫向内翼段移动,
减小了翼根的弯矩,由计算弯矩减少10%~15%,机翼结 构重量可减轻5%,航程可增加30%。 带来问题: 这样配置翼面,机动飞行时会增加阻力,但由于机动飞行 时间只占很少时间,所以为达到减轻结构载荷目的,可允 许降低升阻比。
(4)歼击机的机动载荷控制
; 0.6 M 0.9 ; 0.9 M 1.0 ; M 1.0
前缘襟翼偏角随 、 变化规律 M
0 M
25 20 15 10 5 2 6 10 20
deg
k2
qj deg
M 0.6
M 0.9
11.6
6.0
deg
30
k1
2.0 0.2 0.6 0.91.0
先进飞行控制系统
第十六节课(20121207)
7.2.4 机动载荷控制
(1)什么是机动载荷控制? 机动载荷控制:利用自动控制的方法,在机动飞行时,重 新分布机翼上的载荷使其具有理想的分布特性,从而达到 减小机翼结构重量和机动性能的提高。 机动载荷控制是CCV的基本功能之一,它同RSS(放宽 静稳定性)功能一起最先投入应用。从机动性上讲,也希 望有一个理想的载荷分布,以获取最小阻力特性和最大的 升阻力。
飞机机翼弯矩分布图:
机翼弯矩 机动载荷控制
机动飞行 平飞 翼根 翼尖
机翼剪力 机动载荷控制
平飞
机动飞行
动飞行 平飞
翼尖 翼根
由上图可见:
靠翼根处机翼弯矩,机翼剪力与机翼载荷较大,而越靠翼 尖处越小。
由于翼根处弯矩,剪力和载荷都大,∴设计时翼梁凸缘面 积要大。 机动飞行时,使机翼载荷增大甚多。
M
M>1以后,前缘襟翼偏转会引起波阻剧增,自动操纵应不
起作用,前缘襟翼应收起不动。
此外,前缘襟翼还与起落架收放联动,即: 起落架收上时,襟翼 随
qj
、M自动调节
起落架放下时,(起飞、着陆时)襟翼固定偏转25°成为 增升襟翼,改善起落性能。
前缘襟翼控制方块图:
q
Ts Ts 1
达50%,大型飞机可达70%阵风减载效益。
(2)乘感控制
1)乘感控制
乘感控制也称乘坐品质控制。对于机身细长而挠性大的高 速飞机,若遇到周期性的阵风,机身发生弹性振动时,乘 员会感到不舒服,甚至影响驾驶员完成任务,飞机难于操 纵,机体易疲劳损坏经验表明:通常在垂直振动过载超过 0.1g时,旅客感到不适,超过0.2g,判读仪表困难,超过 0.5g并持续几分钟后,驾驶员就会担心飞机出事故而改变 飞行高度和速度。横向过载的允许值约为垂直过载的一半。
由此两项指标可知:要提高剩余功率 PS ,应减小飞机阻 力;要提高法向过载
nZ max ,应提高抖振升力系数。此二
者可通过载荷重新分布来实现。
3)歼击机机动载荷控制的理想分布:
在机动飞行时使机翼升力是椭圆形分布(见下图),从而减
小机翼的诱导阻力,同时,在亚音速时延缓机翼上的气流分 离,提高抖振升力系数,提高升力。(阻力↓使 PS ↑,升力↑ 使 nZ max ↑)
0.5
作动筒
+
10 s 10
qj
1.6
0 M
-
0
KP TP s 1
qj
M
0
M
特点:
按迎角 与俯仰速率q来偏转襟翼偏角
引入q经清洗网络后的作用是增加系统的动态阻尼
效益:
对YF-16,在H=9000m,以最大推力作稳定盘旋时,稳
定盘旋过载可提高18%。 就改变翼型弯度,减小大迎角阻力而言,后缘襟翼作用较小, 所以后缘襟翼控制用的较少(只F-5E用了)。
1)设计出发点:
主要考虑机动性。这是因为歼击机翼展较小,使用寿命也 比运输机短,所以减少翼根弯矩和结构疲劳不是主要矛盾, 主要是提高机动性。
2)衡量飞机机动性主要有两项基本指标
(a)飞机最大的法向过载
n Z max
式中
Cl max QS G
Cl max :法向力导数(最大值) 在高空、亚音速飞行时,nZ max 取决于有抖振迎角时的抖
最优规律来偏转内侧、前、后缘襟翼)
B-52轰炸机机动载荷控制系统:
机翼
襟翼
副翼 外侧襟副翼
外副翼
内襟翼―改为快速动作的机动襟翼。
在原来副翼内侧―增加一对可同时对称偏转的外侧襟副翼。
机动飞行时: 左右内侧机动襟翼向下偏转―提高机身附近翼段的升力。 左右外侧襟副翼同时上偏―降低外翼段升力,并保证其升 力增量满足机动飞行的要求。
而机动襟翼偏转的角度 qj 是 与M的函数 其具体规律通常由风洞实验给出:
qj f ( , M )
YF-16:其襟翼偏转规律为:
qj K qj o (M )
式中: 配平迎角为:
K qj 1.6
; M 0.6
2o o 2 K1 ( M 0.6) o (M ) o 6 K 2 ( M 0.9) 11.6o
30下反角的水平前置鸭翼,偏转角可达 20 。当它们对
称偏转时,气动力的水平分量相互抵消,形成垂直控制力; 当差动偏转时,垂直分量相互抵消,形成水平控制力。这两 种控制方式分别抑制机身垂直和横向的弹性扰动。
采用机动载荷控制的战斗机升力分布
机动载荷控制 平飞
4)控制方案与原理
机动载荷控制主要是靠飞机的控制面来实现。包括两种方法
前缘控制面:前缘机动襟翼,前缘缝翼 后缘控制面:机动襟翼,与对称偏转的副翼 前缘机动襟翼一般是自动按迎角 增加而向下偏,改变机 翼弯度,减小气流分离改变压力分布,提高升阻比。
C L qV 0
u0 P
1
C L u0V 0
2P
PG
S 为翼载。
飞机在阵风中飞行时,过载增量与飞行速度 u0 、翼 载P以及升力系数CL有关,同时也与垂直阵风速度 V0 成 正比。 阵风还会引起飞机结构模态振动,尤其对于机身细长 而挠性较大的高速飞机影响更为严重。不仅使乘员感到不 舒服,甚至会影响驾驶员完成任务的能力。 一般,垂直过载超过0.2g时,仪表判读就很困难,而 在超过0.5g并持续几分钟时,驾驶员由于担心飞机要出事 故,便会改变飞机的高度、速度。横向振动过载的允许值 为垂直过载的1/2。
2)控制目的
飞机受到大气扰动时产生的过载中的弹性振动不容忽视,
必须加以抑制。常规方法是增加机体结构刚度和选择对阵风 敏感性小的机翼,但这样做增加了结构的重量,应采用CCV 技术,控制相应的控制面,产生气动结构阻尼力抑制飞机弹 性振动。
3)控制原理
以B-1飞机为例:在飞机驾驶舱下方机身两侧,安装了一对
2)阵风减缓控制系统
在阵风干扰时,降低均方根过载反应,提高扰流中飞行
的平稳性,从而改善乘员的舒适感——这对大型飞机是很必 要的,对小型、战斗机不重要。 阵风减缓实际上是直接力控制在扰动运动中的应用,即 通过偏转相应的操纵面,产生一个大小相等、方向相反的升
力变化来抵消阵风的影响。
阵风减缓与机动载荷联用时,要解决模式相容性问题,即
设法通过自动控制方法,在飞机机动飞行时,将其机翼载 荷增量集中在机身附近,这样就可避免翼根弯矩的明显增
加(如图a中红线所示),若根据这种载荷分布设计机翼,
就可减轻机翼结构重量,也就减轻了飞机的重量,提高了 飞机巡航的经济性。