Adaptive feedback linearizing nonlinear close formation control of UAVs
自适应控制(Astrom著)Lecture1
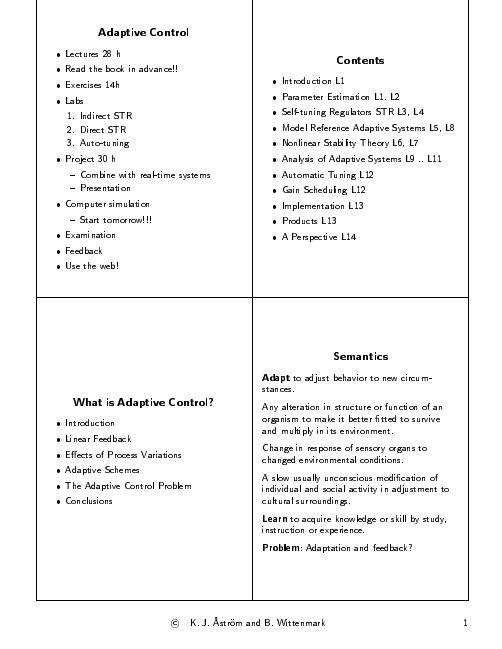
stances. Any alteration in structure or function of an organism to make it better tted to survive and multiply in its environment. Change in response of sensory organs to changed environmental conditions. A slow usually unconscious modi cation of individual and social activity in adjustment to cultural surroundings. Learn to acquire knowledge or skill by study, instruction or experience. Problem: Adaptation and feedback?
c K. J. str m and B. Wittenmark
Dual Control
uc Nonlinear control law u Process y
The Adaptive Control Problem
Principles Certainty Equivalence Caution Dual Control Controller structure Linear Nonlinear State Model Input Output Model Control Design Method Parameter Adjustment Method Speci cations Situation dependent? Optimality
0
5
基于Backstepping设计的非线性大系统模糊自适应输出反馈分散控制
随 着 非 线 ak t pn I c s p ig自适 应 设 计 技 术 和 模 糊 控 制 的 发 展 , 许 多 学 者 把 模 糊 自适 应 控 制 和 '  ̄b e ¨
、 l 0 No 2 , _ . . 0 3
Ap . 01 r2 0
基 于 B c se pn a k tp ig设 计 的 非 线 性 大 系 统
模 糊 自适 应 输 出反 馈 分散 控 制
刘 长 亮 ,佟 绍 成
( 宁 L 大 学 电气 工程 学 院,辽 宁 锦州 辽 业 110 ) 2 0 1
第 3 第 2期 O卷 2 1 年 4月 00
辽 宁工业大学学报 ( 自然科 学版)
Junl f i nn iesyo eh oo yNa rl ce c dt n o ra o a igUnv r t f c n lg ( t a S ineE io ) L o i T u i
m e s e e . n t c t p i e u svede i n, uz y l i yse swe e e p o e o a p o i a e a ur m nt I ba kse p ng r c ri sg f z og c s tm r m l y d t p r x m t he
t e u kn wn n ln a un ton nd Nus b u g i t c ni u st k n t a e s l e e u k own h n o oni e f ci ,a r s a m an e h q e wa a e o h v o v d t n n h h g — e e c i i n. ti o d t a ep o os d f z d ptv e e ta ie o ro c e ec n i h f qu n y gan sg I spr ve h t r p e uz y a a i ed c n l d c nt ls h m a r h t r z
不确定非仿射非线性时滞系统的神经网络自适应控制
Sp20 0 e 1
.
Vo 2 No. 1 7 3
文章编号 :0 2 7 3 2 1 )3 0 2 5 1 0 —8 4 { 0 0 0 —0 3 —0
不 确 定 非 仿 射 非 线 性 时 滞 系统 的 神 经 网络 自适 应 控 制
江惠英 王汝凉b梅昆波 , , 一
( 西师范 学院 a数 学科 学学院 ;. 算机 与信 息 工程 学 院 , 广 . b计 广西 南 宁 50 2 ) 30 3
中 图分 类 号 : 2 2 TP 0 文献标识码 : A
1 引 言
在 工程上 , 几乎所 有 的系统都 具有非 线性特 性 , 同时 , 制对 象 的不确 定 性 和时 变性 一直 是研 究 者 控 面 临的具有挑 战性 的问题 , 因此 , 不确定 非线性 系统 引起 了人们 的关 注 , 并取得 了许 多重要 的结果 .
摘 要: 针对一类不 确定非仿射非线性时滞系统 , 出了一种神经 网络的 自适应控 制器 . 提 利用隐 函数定 理、 泰
勒展开式和中值定理 , 把非仿射非线性时滞系统转化 为仿射非线性 时滞系统 , 同时利用 神经网络可逼 近任意非线
性 函数的能力 , 结合误 差滤波理论及 Y u g on 不等式处理 时滞项 . 根据 L au o 理论 , ypn v 在一定 的条件 下 , 出了系统 给 稳定的充分条件 , 并给予证明. 该控制器保证 了跟踪误差收敛 , 从而说 明了该控制器的有效性 . 关键词 : 非仿射非线 性 ; 时滞系统 ; 神经 网络 ; 自适应
性 能变差 的主要原 因 . 本 文针对 非线性 时滞 系统 的两类不 确定项 : ) 建模 动态 , ) 仿射 未 知 函数 , 1未 2非 主要 是 利用 隐 函数
Observer-based adaptive fuzzy backstepping dynamic surface control for a class of non-linear ....
Published in IET Control Theory and Applications Received on 29th October 2010 Revised on 10th February 2011 doi: 10.1049/iet-cta.2010.0632
1426 & The Institution of Engineering and Technology 2011
fuzzy or neural backstepping control approaches suffer from the problem of ‘explosion of complexity’. The ‘explosion of complexity’ is caused by repeated differentiations of some non-linear functions at each step within the conventional backstepping technique. As a result, the complexity of a controller drastically grows as the order of the system increases. Recently, the dynamic surface control (DSC) technique has been proposed to avoid this problem by introducing a first-order low-pass filter at each step of the conventional backstepping design procedure [17 – 20]. In [17], a robust control is studied for non-linear systems in strict feedback form. In [18], a simplified DSC algorithm is developed for non-linear systems in parametric strict feedback form. In [19, 20], adaptive DSC approaches are proposed for adaptive tracking control of a class of canonical-form SISO systems with and without time-delays, respectively. However, the above-mentioned DSC approaches have two limitations. One is that these approaches require that the controlled non-linear dynamics models be known exactly or the unknown non-linear functions can be linearly parameterised. If those kinds of knowledge are not available a priori, these adaptive backstepping controllers cannot be applied. The other is that they require that all the states be available for measurements. To cope with the problem of ‘explosion of complexity’ inherent in the existing adaptive fuzzy or neural backstepping control schemes, an adaptive neural backstepping control
Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints

article
info
abstract
In this paper, adaptive tracking control is proposed for a class of uncertain multi-input and multi-output nonlinear systems with non-symmetric input constraints. The auxiliary design system is introduced to analyze the effect of input constraints, and its states are used to adaptive tracking control design. The spectral radius of the control coefficient matrix is used to relax the nonsingular assumption of the control coefficient matrix. Subsequently, the constrained adaptive control is presented, where command filters are adopted to implement the emulate of actuator physical constraints on the control law and virtual control laws and avoid the tedious analytic computations of time derivatives of virtual control laws in the backstepping procedure. Under the proposed control techniques, the closed-loop semi-global uniformly ultimate bounded stability is achieved via Lyapunov synthesis. Finally, simulation studies are presented to illustrate the effectiveness of the proposed adaptive tracking control. © 2011 Elsevier Ltd. All rights reserved.
Adaptive neural tracking control for stochastic nonlinear strict-feedback systems
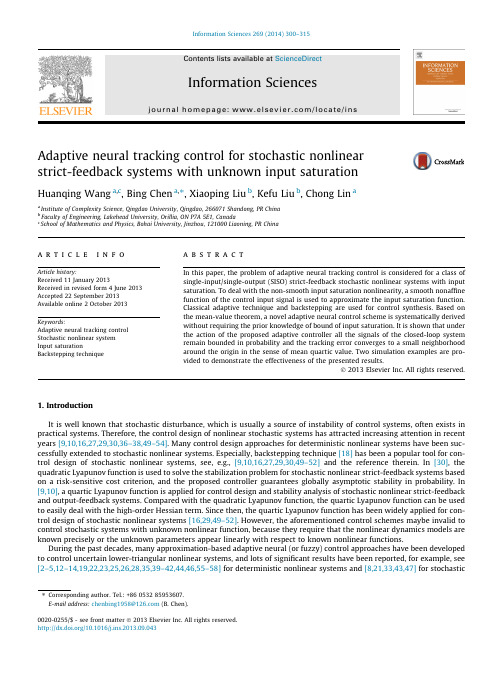
Adaptive neural tracking control for stochastic nonlinear strict-feedback systems with unknown inputsaturationHuanqing Wang a ,c ,Bing Chen a ,⇑,Xiaoping Liu b ,Kefu Liu b ,Chong Lin aaInstitute of Complexity Science,Qingdao University,Qingdao,266071Shandong,PR China bFaculty of Engineering,Lakehead University,Orillia,ON P7A 5E1,Canada cSchool of Mathematics and Physics,Bohai University,Jinzhou,121000Liaoning,PR Chinaa r t i c l e i n f o Article history:Received 11January 2013Received in revised form 4June 2013Accepted 22September 2013Available online 2October 2013Keywords:Adaptive neural tracking control Stochastic nonlinear system Input saturationBackstepping techniquea b s t r a c tIn this paper,the problem of adaptive neural tracking control is considered for a class of single-input/single-output (SISO)strict-feedback stochastic nonlinear systems with input saturation.To deal with the non-smooth input saturation nonlinearity,a smooth nonaffine function of the control input signal is used to approximate the input saturation function.Classical adaptive technique and backstepping are used for control synthesis.Based on the mean-value theorem,a novel adaptive neural control scheme is systematically derived without requiring the prior knowledge of bound of input saturation.It is shown that under the action of the proposed adaptive controller all the signals of the closed-loop system remain bounded in probability and the tracking error converges to a small neighborhood around the origin in the sense of mean quartic value.Two simulation examples are pro-vided to demonstrate the effectiveness of the presented results.Ó2013Elsevier Inc.All rights reserved.1.IntroductionIt is well known that stochastic disturbance,which is usually a source of instability of control systems,often exists in practical systems.Therefore,the control design of nonlinear stochastic systems has attracted increasing attention in recent years [9,10,16,27,29,30,36–38,49–54].Many control design approaches for deterministic nonlinear systems have been suc-cessfully extended to stochastic nonlinear systems.Especially,backstepping technique [18]has been a popular tool for con-trol design of stochastic nonlinear systems,see, e.g.,[9,10,16,27,29,30,49–52]and the reference therein.In [30],the quadratic Lyapunov function is used to solve the stabilization problem for stochastic nonlinear strict-feedback systems based on a risk-sensitive cost criterion,and the proposed controller guarantees globally asymptotic stability in probability.In [9,10],a quartic Lyapunov function is applied for control design and stability analysis of stochastic nonlinear strict-feedback and output-feedback pared with the quadratic Lyapunov function,the quartic Lyapunov function can be used to easily deal with the high-order Hessian term.Since then,the quartic Lyapunov function has been widely applied for con-trol design of stochastic nonlinear systems [16,29,49–52].However,the aforementioned control schemes maybe invalid to control stochastic systems with unknown nonlinear function,because they require that the nonlinear dynamics models are known precisely or the unknown parameters appear linearly with respect to known nonlinear functions.During the past decades,many approximation-based adaptive neural (or fuzzy)control approaches have been developed to control uncertain lower-triangular nonlinear systems,and lots of significant results have been reported,for example,see [2–5,12–14,19,22,23,25,26,28,35,39–42,44,46,55–58]for deterministic nonlinear systems and [8,21,33,43,47]for stochastic 0020-0255/$-see front matter Ó2013Elsevier Inc.All rights reserved./10.1016/j.ins.2013.09.043⇑Corresponding author.Tel.:+86053285953607.E-mail address:chenbing1958@ (B.Chen).nonlinear systems.In these proposed control schemes,radial basis function (RBF)neural networks (or fuzzy logic systems)are used to approximate uncertain smooth nonlinear functions,and then adaptive backstepping technique is applied to de-sign controllers.For the deterministic systems,Ge et al.[12–14]develop several adaptive neural control schemes for SISO nonlinear systems and multi-input and multi-output (MIMO)nonlinear systems.In [57,58],the problem of adaptive neural tracking control is considered for MIMO nonlinear systems with dead-zone.Then,for stochastic systems,Psillakis and Alex-andridis [33]proposes an adaptive neural network control scheme to solve the problem of output tracking control for uncer-tain stochastic nonlinear strict-feedback systems with unknown covariance noise.Alternatively,in [47],a fuzzy-based adaptive control scheme is presented for a class of uncertain strict-feedback stochastic nonlinear systems with unknown vir-tual control gain function.The proposed controller guarantees that all the signals in the closed-loop systems are semi-glob-ally uniformly bounded in probability.Recently,in [8,21,24,43],several approximation-based adaptive control approaches are proposed for some classes of stochastic nonlinear strict-feedback time-delay (or delay-free)systems.In many practical systems,input saturation is one of the most important non-smooth nonlinearities.It often severely lim-its the system performance,gives rise to undesirable inaccuracy or leads to instability [32].Therefore,the phenomenon of input saturation has to be considered when the controller is designed in practical industrial process control field.So far,many significant results on control design of the systems with input saturation have been obtained,for example,see [6,7,11,48,59].In [59],a globally stable adaptive control approach is presented for minimum phase SISO systems with input saturation.Chen et al.[6]proposes a robust adaptive neural control for a class of MIMO nonlinear systems with input non-linearities.By introducing auxiliary design systems to analyze the effect of input constraints,in [7],an adaptive tracking con-trol is proposed for a class of uncertain nonlinear systems with non-symmetric input constraints,and the derived controller guarantees that the closed-loop system is semi-globally uniformly ultimately bounded stability.Wen et al.[48]considers the problem of adaptive control for a class of uncertain nonlinear systems in the presence of input saturation and external dis-turbance,in which two new schemes are developed to compensate for the effects of the saturation nonlinearity and distur-bances.Though the aforementioned results take input saturation nonlinearity into account,the effect of stochastic disturbance is ignored.Note that stochastic disturbance and input constraint could be existed in many practical systems.Motivated by the above observations,this paper considers the problem of adaptive neural tracking control for the case of nonlinear strict-feedback systems with stochastic disturbance and input saturation simultaneously.The proposed adaptive neural control scheme guarantees that all the signals in the closed-loop system are bounded in probability and the tracking error eventually con-verges to a small neighborhood around the origin in the sense of mean quartic pared with the existing results,the main idea of control design in this paper is that a smooth non-affine function of the control input signal is firstly used to approximate the saturation function,and furthermore,the mean-value theorem is used to transform the non-affine function into affine form,i.e.,g ðv Þ¼g v l v .Then,the classical adaptive technique and backstepping are used to design controller.The proposed design approach does not require the prior knowledge of the bound of input saturation.In addition,the number of adaptive parameters just depends on the order of the considered systems.So,it is reduced considerably.In this way,the computational burden is significantly alleviated.This paper is organized as follows.The preliminaries and problem formulation are given in Section 2.A novel adaptive neural control scheme is presented in Section 3.Section 4gives two simulation examples to illustrate the effectiveness of our results,and Section 5concludes the work.2.Preliminaries and problem formulationThe following notations are used throughout this paper.R denotes the set of all real numbers;R n indicates the real n-dimensional space.For a given vector or matrix X ,X T denotes its transpose;Tr{X }is its trace when X is a square matrix;and k X k denotes the Euclidean norm of a vector X .C i denotes the set of all functions with continuous i th partial derivative.Consider the following strict-feedback stochastic nonlinear system given by:dx i ¼ðg i ðx i Þx i þ1þf i ð x i Þþd i ðt ;x ÞÞdt þw T i ð x i Þdw ;16i 6n À1;dx n ¼ðg n ð x n Þu ðv Þþf n ð x n Þþd n ðt ;x ÞÞdt þw Tn ð x n Þdw ;y ¼x 1;8><>:ð1Þwhere x i ¼½x 1;x 2;...;x i T 2R i ,x =[x 1,x 2,...,x n ]T 2R n and y 2R are the state variables and the system output,respectively;w denotes an r-dimensional standard Brownian motion defined on the complete probability space (X ,F ,P )with X being a sam-ple space,F being a r -field,and P being a probability measure;f i (Á),g i (Á):R i ?R ,w i (Á):R i ?R r ,(i =1,2,...,n )stand for the unknown smooth nonlinear functions with f i (0)=0and w i (0)=0(16i 6n ),d i (Á),i =1,2,...,n are the external disturbance uncertainties of the system.v is the control signal to be designed,and u (v )denotes the plant input subject to saturation non-linearity described byu ðv Þ¼sat ðv Þ¼sign ðv Þu max ;j v j P u max ;v ;j v j <u max ;&ð2Þwhere u max is a unknown parameter of input saturation.H.Wang et al./Information Sciences 269(2014)300–315301Remark 1.There exist many practical systems which are described by strict-feedback form,such as One-Link Robot system,Pendulum System With Motor,Single-Link Manipulator system [55],and Brusselator model [45].Meanwhile,stochastic disturbance and input saturation are inevitable in practical process.Therefore,the aforementioned systems can be governed by nonlinear differential equations of the form (1).The control objective is to design an adaptive neural controller for system (1)such that the system output y follows the specified desired trajectory y d and all the signals in the closed-loop systems remain bounded in probability.From (2),it can be seen that there exists a sharp corner when j v j =u max .So backstepping technique cannot be directly applied to construct control input signal.To solve this problem,the method proposed in [48]will be implemented.By this method,a smooth function is used to approximate the saturation function and defined asg ðv Þ¼u max Ãtanh ðv =u max Þ¼u max Ãe v =u max Àe Àv =u maxv max v max:ð3ÞThen,sat (v )in (2)can be expressed in the following form:sat ðv Þ¼g ðv Þþd ðv Þ;ð4Þwhere d (v )=sat (v )Àg (v )is a bounded function and its bound can be obtained asj d ðv Þj ¼j sat ðv ÞÀg ðv Þj 6u max ð1Àtanh ð1ÞÞ¼D :ð5ÞFig.1shows the saturation nonlinearity in (2)and its approximation function in (3).According to the mean-value theorem [1],there exists a constant l with 0<l <1,such thatg ðv Þ¼g ðv 0Þþg v l ðv Àv 0Þ;ð6Þwhere g v l ¼@g ðv Þv j v ¼v l¼4ðe =u max þe À=u max Þj v ¼v l ,v l =l v +(1Àl )v 0.By choosingv 0=0,(6)can be written asg ðv Þ¼g v l v ;ð7ÞSubstituting (4)into (1)and using (7)givesdx i ¼ðg i ðx i Þx i þ1þf i ð x i Þþd i ðt ;x ÞÞdt þw T i ð x i Þdw ;16i 6n À1;dx n ¼ðg n ð x n Þðg v l v þd ðv ÞÞþf n ð x n Þþd n ðt ;x ÞÞdt þw T n ð x n Þdw ;y ¼x 1:8><>:ð8ÞTo facilitate control system design,the following assumptions and lemmas are presented and will be used in the subsequent developments.Assumption 1([3,14]).For 16i 6n ,the function g i ðx i Þis unknown,but the sign of g i ð x i Þdoes not change,and there exist unknown constants b m and b M ,such that0<b m 6j g i ð x i Þj 6b M <1;8 x i 2R i :ð9ÞApparently,(9)implies that g i ðx i Þis strictly either positive or negative.Without loss of generality,it is further assumed that 0<b m 6g i ð x i Þ6b M ;8x i 2R i :ð10ÞAssumption 2[45].For 16i 6n ,thereexistunknownsmoothpositivefunctionsh i ð x i Þsuchthat8ðt ;x Þ2R þÂX ;j d i ðt ;x Þj 6h i ðx i Þ.302H.Wang et al./Information Sciences 269(2014)300–315Assumption 3[3].The desired trajectory y d (t )and its n th order time derivatives are continuous and bounded.To introduce some useful conceptions and lemmas,consider the following stochastic system:dx ¼f ðx Þdt þh ðx Þdw ;ð11Þwhere x and w are defined in (1),and f (Á)and h (Á)are locally Lipschitz functions in x and satisfy f (0)=0and h (0)=0.Definition 1.For any given V (x )2C 2,associated with the stochastic differential Eq.(11),define the differential operator L as follows:LV ¼@V @x f þ12Tr h T@2V @x 2h ();ð12Þwhere Tr (A )is the trace of A .Remark 2.As stated in [29],the term 1Tr h T @2Vh n ois called It ^o correction term or high-order Hessian term,in which the second-order differential @2V2makes the controller design much more difficult than that of the deterministic system.Definition 2[17].The solution process {x (t ),t P 0}of stochastic system (11)is said to be bounded in probability,if lim c ?1sup 06t <1P{k x (t )k >c }=0,where P{B }denotes the probability of event B .Lemma 1[33].Consider the stochastic system (11).If there exists a positive definite,radially unbounded,twice continuously dif-ferentiable Lyapunov function V :R n !R ,and constants a 0>0,b 0P 0such thatLV ðx Þ6Àa 0V ðx Þþb 0;then (i)the system has a unique solution almost surely and (ii)the system is bounded in probability.Lemma 2(Young’s inequality [9]).For "(x,y)2R 2,the following inequality holds:xy 6e ppj x j p þ1q eq j y j q ;where e >0,p >1,q >1,and (p À1)(q À1)=1.Lemma 3[31].For any variable g 2R and constant>0,the following inequality holds.06j g j Àg tanhg6d ;d ¼0:2785:ð13ÞIn this note,the following RBF neural networks will be used to approximate any continuous function f (Z ):R n ?R ,f nn ðZ Þ¼W T S ðZ Þ;ð14Þwhere Z 2X Z &R q is the input vector with q being the neural networks input dimension,weight vector W =[w 1,w 2,...,w l ]-T2R l ,l >1is the neural networks node number,and S (Z )=[s 1(Z ),s 2(Z ),...,s l (Z )]T means the basis function vector with s i (Z )being chosen as the commonly used Gaussian function of the forms i ðZ Þ¼exp ÀðZ Àl i ÞT ðZ Àl i Þr 2"#;i ¼1;2;...;l ;ð15Þwhere l i =[l i 1,l i 2,...,l iq ]T is the center of the receptive field and r is the width of the Gaussian function.In [34],it has been indicated that with sufficiently large node number l ,the RBF neural networks (14)can approximate any continuous function f (Z )over a compact set X Z &R q to arbitrary any accuracy e >0asf ðZ Þ¼W ÃTS ðZ Þþd ðZ Þ;8z 2X z 2R q ;ð16Þwhere W ⁄is the ideal constant weight vector and defined asW Ã:¼arg min W 2lsup Z 2X Zj f ðZ ÞÀW T S ðZ Þj ();and d (Z )denotes the approximation error and satisfies j d (Z )j 6e .H.Wang et al./Information Sciences 269(2014)300–315303Lemma 4[20].Consider the Gaussian RBF networks (14)and (15).Let q :¼12min i –j kl i Àl j k ,then an upper bound of k S(Z)k istaken ask S ðZ Þk 6X 1k ¼03q ðk þ2Þq À1e À2q 2k 2=r 2:¼s :ð17ÞIt has been shown in [44]that the constant s in Lemma 3is a limited value and is independent of the variable Z and the dimension of neural weights l .3.Adaptive neural control designIn this section,a backstepping-based design procedure will be proposed to construct the adaptive neural tracking control-ler for the original systems (1)with input saturation nonlinearity (2).The design procedure contains n steps and involves the following coordinate transformation:z 1¼x 1Ày d ;z i ¼x i Àa i À1;i ¼2;...;n ;ð18Þwhere a i is a virtual control signal to be designed for the corresponding i -subsystem based on an appropriate Lyapunov func-tion V i .During the design procedure,the virtual control signal and adaptive law will be constructed in the following form:a i ðZ i Þ¼Àk i z i À^h i k S i ðZ i Þk tanhz 3i k S i ðZ i Þk i;ð19Þ_^h i ¼Àc i ^h i þk i z 3i k S i ðZ i Þk tanh z 3i k S i ðZ i Þk a i;ð20Þwhere 16i 6n ,k i ,a i ,c i and k i are positive design contants,S i (Z i )is the RBF neural network basis function vector with Z 1¼½x 1;y d ;_y d T 2X Z 1&R 3;Z i ¼ x T i ; ^h T i À1; y ði ÞT d h i T 2X Z i &R 2i þ2ði ¼2;...;n Þ; ^h i ¼½^h 1;^h 2;...;^h i T . yði Þd denotes the vector composed of y d and up to its i th order time derivative,^h i is the estimation of an unknown constant h i which will be given at the i th step,Specially,a n denotes the actual control input v .Remark 3.It is easy to prove from (20)that if initial condition ^h i ð0ÞP 0,then ^h i ðt ÞP 0for all t P 0.Note that ^h i is an estimation of h i ,and the initial condition of (20)can be given by designer.So,it is reasonable to choose ^h i ð0ÞP 0.Thisproperty will be used in each step of control design.In the following,for simplicity,the time variable t and the state vector x i will be omitted from the corresponding functions and denote S i (Z i )by S i .Step 1:Since z 1=x 1Ày d ,the first subsystem of (1)givesdz 1¼ðg 1x 2þf 1þd 1À_y d Þdt þw T 1dw :ð21ÞConsider Lyapunov function candidate asV 1¼1z 41þb m 1~h 21;ð22Þwhere ~h 1¼h 1À^h 1is the parameter error.It can be verified easily from (12)along (21)and using the completion of squares thatLV 16z 31g 1x 2þf 1þd 1À_y d þ34l À21z 1k w 1k 4þ34l 21Àb m k 1~h 1_^h 1;ð23Þwhere l 1is a design constant.By means of Assumption 3,the following inequality holds:z 31d 16j z 1j 3h 1ðx 1Þ612g211z 61h 21ðx 1Þþ12g 211:ð24ÞSubstituting (24)into (23)yieldsLV 16z 31ðg 1x 2þ f 1ðZ 1ÞÞÀ3z 41À3g 1z 41þ3l 21þ1g 211Àb m 1~h 1_^h 1;ð25Þwhere f 1ðZ 1Þ¼f 1À_y d þ12g 211z 31h 21ðx 1Þþ34l À21z 1k w 1k 4þ34z 1þ34g 1z 1.Since the smooth functions f 1,g 1,h 1and w 1are unknown, f 1ðZ 1Þcannot be directly used to construct virtual control signal a 1.Thus,an RBF neural network W T 1S 1ðZ 1Þis employed toapproximate the function f 1ðZ 1Þsuch that,for any given e 1>0,f 1ðZ 1Þ¼W T 1S 1ðZ 1Þþd 1ðZ 1Þ;j d 1ðZ 1Þj 6e 1ð26Þ304H.Wang et al./Information Sciences 269(2014)300–315with d 1(Z 1)being the approximation error.Then,according to Lemma 3,one hasz 31 f 1ðZ 1Þ¼z 31W T1S 1þz 31d 16j z 31jk W 1kk S 1kþ34z 41þ14e 416z 31b m h 1k S 1k tanh z 31k S 1k a 1þd b m h 1a 1þ34z 41þ14e 41;ð27Þwhere the unknown constant h 1¼k W 1k m.Substituting (26)into (25)and using (27)givesLV 16z 31g 1z 2þz 31g 1a 1þz 31b m h 1k S 1k tanhz 31k S 1k 1þd b m h 1a 1þ1e 41À3g 1z 41þ3l 21þ1g 211Àb m 1~h 1_^h 1;ð28Þwhere z 2=x 2Àa 1.At the present stage,constructing the virtual control signal a 1asa 1¼Àk 1z 1À^h 1k S 1k tanhz 31k S 1k a 1;ð29Þthen using (10),we havez 31g 1a 16Àk 1b m z 41Àz 31b m ^h 1k S 1k tanhz 31k S 1k a 1:ð30ÞFrom (30),rewrite (28)asLV 16Àk 1b m z 41þz 31g 1z 2À3g 1z 41þd b m h 1a 1þ1e 41þ3l 21þ1g 211þb m 1~h 1k 1z 31k S 1k tanh z 31k S 1k 1 À_^h 1:ð31ÞBy choosing adaptive law _^h 1in (20)with i =1,it followsLV 16Àk 1b m z 41þz 31g 1z 2þd b m h 1a 1þ14e 41þ34l 21þ12g 211þb m c1k 1~h 1^h 1:ð32ÞFurthermore,applying Young’s inequality yieldsz 31g 1z 263g 1z 41þ1g 1z 42;ð33Þb m c 1k 1~h 1^h 1¼Àb m c 1k 1~h 21þb m c 1k 1~h 1h 16Àb m c 12k 1~h 21þb m c 12k 1h 21:ð34ÞUsing (33)and (34),we can further haveLV 16Àk 1b m z 41Àb mc 12k 1~h 21þd b m h 1a 1þ14e 41þ34l 21þ12g 211þb m c 12k 1h 21þ14g 1z 426Àc 1z 41Àb m c 12k 1~h 21þq 1þ14g 1z 42;ð35Þwhere c 1¼k 1b m ;q 1¼d b m h 1a 1þb m c 11h 21þ1e 41þ3l 21þ1g 211.The term 1g 1z 42will be dealt with in the next step.Step 2:From z 2=x 2Àa 1and It ^oformula,we have dz 2¼ðg 2x 3þf 2þd 2À‘a 1Þdt þw 2À@a 1@x 1w 1Tdw ;ð36Þwhere‘a 1¼@a 1@x 1ðg 1x 2þf 1þd 1ÞþN 1ð37ÞwithN 1¼X 1j ¼0@a 1@y ðj Þdy ðj þ1Þdþ@a 1@^h 1_^h 1þ12@2a 1@x 21w T1w 1:ð38ÞChoose the Lyapunov function asV 2¼V 1þ14z 42þb m 2k 2~h 22:ð39ÞFurthermore,by (12)it can be verified thatLV 2¼LV 1þz 32ðg 2x 3þf 2þd 2À‘a 1Þþ3z 22w 2À@a 11w 1 T w 2À@a 11w 1Àb m 2~h 2_^h 2:ð40ÞBy substituting (31)and (37)into (40)and using the completion squares to the term next to the last one in (40),one hasH.Wang et al./Information Sciences 269(2014)300–315305LV26Àc1z41Àb m c12k1~h21þq1þ14g1z42þz32g2x3þf2þd2À@a1@x1ðg1x2þf1þd1ÞÀN1þ34lÀ22z2k w2À@a1@x1w1k4þ34l22Àb mk2~h2_^h2;ð41Þwhere l2is a positive design ing the similar way to(24)yieldsÀz32@a1@x1d16j z32j@a1@x1h1612g21z62@a1@x12h21þ12g221;ð42Þz3 2d2612g222z62h22þ12g222:ð43ÞWith the help of(42)and(43),(41)can be written asLV26Àc1z41Àb m c11~h21þq1þz32g2x3þ f2ðZ2ÞÀÁÀ3z42À3g2z42þ3l22þ1X2j¼1g22jÀb m2~h2_^h2;ð44Þwheref 2ðZ2Þ¼f2À@a1@x1ðg1x2þf1Þþ14g1z2ÀN1þ3z24l2k w2À@a1@x1w1k4þ12g21z32@a1@x12h21þ12g22z32h22þ34z2þ34g2z2:ð45ÞNote that f2ðZ2Þis an unknown smooth function.Therefore,an RBF neural network W T2S2ðZ2Þis used to model the unknownf2ðZ2Þsuch thatf 2ðZ2Þ¼W T2S2ðZ2Þþd2ðZ2Þ;ð46Þwhere the approximate error d2(Z2)satisfies j d2(Z2)j6e2with e2being a given positive constant.Similar to(27),the following inequality holds.z3 2 f2ðZ2Þ6z32b m h2k S2k tanhz32k S2ka2þd b m h2a2þ34z42þ14e42;ð47Þwhere the unknown constant h2¼k W2kb m.Substituting(46)into(44)and using the inequality(47),we haveLV26Àc1z41Àb m c11~h21þq1þd b m h2a2þ1e42þ3l22þ1X2j¼1g22jþz32g2z3þz32g2a2þz32b m h2k S2k tanhz32k S2k2À34g2z42Àb mk2~h2_^h2;ð48Þwhere z3=x3Àa2.Then,take a2in(19)and^h2in(20)into account with i=2,the following inequalities can be obtained.z3 2g2a26Àk2b m z42Àz32b m^h2k S2k tanhz32k S2ka2;ð49Þz3 2g2z3634g2z42þ14g2z43:ð50ÞBy using the above inequalities,we can rewrite(48)asLV26ÀX2j¼1c j z4jÀb m c12k1~h21þq1þd b m h2a2þ14e42þ34l22þ12X2j¼1g22jþb m c2k2~h2^h2þ14g2z436ÀX2j¼1c j z4jÀX2j¼1b mc jj~h2jþX2j¼1qjþ1g2z43;ð51Þwhere c j¼k j b m;q j¼d b m h j a jþb m c jj h2jþ1e4jþ3l2jþ1P jk¼1g2jk;j¼1;2,and the inequality~h2^h26À1~h22þ1h22has been used.Step i(36i6nÀ1):By using(18)and It^o formula,one hasdz i¼ðg i x iþ1þf iþd iÀ‘a iÀ1Þdtþw iÀX iÀ1j¼1@a iÀ1@x jwj!Tdw;ð52Þwhere‘a iÀ1¼X iÀ1j¼1@a iÀ1jðg j x jþ1þf jþd jÞþN iÀ1ð53Þ306H.Wang et al./Information Sciences269(2014)300–315with N iÀ1¼P iÀ1j¼1@a iÀ1@^h j_^hjþP iÀ1j¼0@a iÀ1@yðjÞdyðjþ1Þdþ12P iÀ1p;q¼1@2a iÀ1@x p@x qw Tpwq.Consider Lyapunov function asV i¼V iÀ1þ1z4iþb mi~h2i:ð54ÞIt follows immediately from(12)thatLV i¼LV iÀ1þz3i ðg i x iþ1þf iþd iÀ‘a iÀ1Þþ32z2iwiÀX iÀ1j¼1@a iÀ1@x jwj!TwiÀX iÀ1j¼1@a iÀ1@x jwj!Àb mk i~hi_^hi;ð55Þwhere the term LV iÀ1can be obtained by a straightforward calculation as former steps.LV iÀ16ÀX iÀ1j¼1c j z4jÀX iÀ1j¼1b mc jj~h2jþX iÀ1j¼1qjþ1giÀ1z4i;ð56Þwhere c j¼k j b m;q j¼d b m h j a jþb m c jj h2jþ1e4jþ3l2jþ1P jk¼1g2jk;j¼1;2;...;iÀ1.By using the completion of squares,the following inequality holds:3 2z2iwiÀX iÀ1j¼1@a iÀ1@x jwj2634l2iþ34lÀ2iz4iwiÀX iÀ1j¼1@a iÀ1@x jwj4;ð57Þwhere l i is a positive design parameter.Next,by following a same line used in the procedures from(42)and(43),we haveÀz3iX iÀ1j¼1@a iÀ1@x jd j6X iÀ1j¼1j z i j3j@a iÀ1@x jj h j6X iÀ1j¼112g2ijz6i@a iÀ1@x j2h2jþX iÀ1j¼112g2ij;ð58Þz3 i d i612g2iiz6ih2iþ12g2ii:ð59ÞFurther,substituting(53),(56)and(57)into(55)and using the formulas(58),(59)and(55)can be rewritten asLV i6ÀX iÀ1j¼1c j z4jÀX iÀ1j¼1b mc jj~h2jþX iÀ1j¼1qjþz3iðg i x iþ1þ f iðZ iÞÞÀ3z4iÀ3giz4iþ3l2iþ1X ij¼1g2ijÀb mi~hi_^hi;ð60Þwhere f iðZ iÞis defined asf i ðZ iÞ¼f iÀX iÀ1j¼1@a iÀ1@x jðg j x jþ1þf jÞÀN iÀ1þ34lÀ2iz i k w iÀX iÀ1j¼1@a iÀ1@x jwjk4þX iÀ1j¼112g ijz3i@a iÀ1@x j2h2jþ12g iiz3ih2iþ14giÀ1z i þ34z iþ34giz ið61ÞCurrently,by employing a neural networks W TiS iðZ iÞto approximate the unknown smooth function f iðZ iÞand constructing the virtual control law a i and adaptive law_^h i defined respectively in(19)and(20),and then repeating the similar procedure from(27)–(35)in Step1,the following result is true.LV i6ÀX ij¼1c j z4jÀX ij¼1b mc j2k j~h2jþX ij¼1qjþ14giz4iþ1;ð62Þwhere c j¼k j b m;q j¼d b m h j a jþb m c j2k j h2jþ14e4jþ34l2jþ12P jk¼1g2jk;j¼1;2; (i)Step n:This is thefinal step,and the actual control input v will be constructed.By(18)and It^o formula,we havedz n¼ðg nðg vl vþdðvÞÞþf nþd nÀ‘a nÀ1ÞdtþwnÀX nÀ1j¼1@a nÀ1jwj!Tdw;where‘a nÀ1is given in(53)with i=n.Choose the following Lyapunov function candidate:V n¼V nÀ1þ14z4nþg2k n~h2n;H.Wang et al./Information Sciences269(2014)300–315307。
基于扩展卡尔曼滤波算法的磷酸铁锂电池荷电状态估计

第 62 卷第 5 期2023 年9 月Vol.62 No.5Sept.2023中山大学学报(自然科学版)(中英文)ACTA SCIENTIARUM NATURALIUM UNIVERSITATIS SUNYATSENI基于扩展卡尔曼滤波算法的磷酸铁锂电池荷电状态估计*韦仲爽1,侯巍2,赵彦3,郑寿森1,付青11. 中山大学物理学院,广东广州 5102752. 安徽南瑞继远电网技术有限公司,安徽合肥 2300883. 珠海银河耐吉科技有限公司,广东珠海 519085摘要:电池的荷电状态(SoC,state of charge)是锂离子电池最基本的参数之一,不能直接测量得到。
本文基于二阶Thevenin模型对磷酸铁锂电池进行建模分析,通过混合脉冲功率特性(HPPC,hybrid pulse power charac‐teristic)实验对不同SoC处的模型参数进行识别。
基于MATLAB/Simulink平台,搭建了变参数二阶Thevenin模型与扩展卡尔曼滤波(EKF,extended Kalman filter)算法相结合的估算系统。
仿真结果表明,估算系统在不同工况下的仿真误差不超过2.5%,为锂离子电池管理系统的搭建提供了支持。
关键词:磷酸铁锂电池;荷电状态;二阶Thevenin电路模型;参数识别;扩展卡尔曼滤波算法中图分类号:TM912.9 文献标志码:A 文章编号:2097 - 0137(2023)05 - 0092 - 09State of charge estimation of lithium-iron batteries based onextended Kalman filterWEI Zhongshuang1, HOU Wei2, ZHAO Yan3, ZHENG Shousen1, FU Qing11. School of Physics, Sun Yat-sen University, Guangzhou 510275, China2. Anhui NARI Jiyuan Electric Power System Technology Company Limited, Hefei 230088, China3. Zhuhai Inhenergy Technology Company Limited, Zhuhai 519085, ChinaAbstract:The state of charge of the battery is one of the fundamental parameters of the lithium-ion bat‐tery, which can t be measured directly. In this paper, the second-order Thevenin model is used to ana‐lyze the characteristics of lithium-iron phosphate battery,and the model parameters at different SoC are identified through the hybrid pulse power characteristic (HPPC) experiment. Based on MATLAB/ Simulink platform, an estimation system combining variable parameter second-order Thevenin model and extended Kalman filter (EKF) algorithm is built. The simulation results show that the simulation error of the estimation system is less than 2.5% under different working conditions,which provides support for the development of lithium-ion battery management system.Key words:lithium-iron phosphate battery;SoC;the second-order Thevenin model;parameter identify; EKF algorithmDOI:10.13471/ki.acta.snus.2023B012*收稿日期:2023 − 03 − 26 录用日期:2023 − 04 − 04 网络首发日期:2023 − 06 − 16基金项目:国家自然科学基金(61871410)作者简介:韦仲爽(1996年生),男;研究方向:电力电子与电力传动; E-mail:******************* 通信作者:郑寿森(1963年生),男;研究方向:嵌入式系统控制; E-mail:******************第 5 期韦仲爽,等:基于扩展卡尔曼滤波算法的磷酸铁锂电池荷电状态估计2020年9月,我国明确提出了2030年“碳达峰”以及2060年“碳中和”的目标。
An adaptive feedback linearization strategy for variable speed wind energy coinversion systems

INTERNATIONAL JOURNAL OF ENERGY RESEARCHInt.J.Energy Res.2000;24:151}161An adaptive feedback linearization strategy for variable speedwind energy conversion systemsF.Valenciaga,P.F.Puleston* R S,P.E.Battaiotto and R.J.Mantz SLaboratorio de Electro&nica Industrial,Control e Instrumentacio&n(LEICI),Departamento de Electrotecnia, Facultad de Ingenier n&a,Uni v ersidad Nacional de La Plata,CC91(1900)La Plata,ArgentinaSUMMARYThis paper presents a control strategy based on adaptive feedback linearization intended for variable speed grid-connected wind energy conversion systems(WECS).The proposed adaptive control law accomplishes energy capture maximization by tracking the wind speed#uctuations.In addition,it linearizes the system even in the presence of turbine model uncertainties,allowing the closed-loop dynamic behaviour to be determined by a simple tuning of the controller parameters.Particularly,the attention is focused on WECS with slip power recovery,which use a power conversion stage as a rotor-controlled double-output induction generator.However,the concepts behind the proposed control strategy are general and can be easily extended to other WECS con"gurations.Copyright 2000John Wiley&Sons,Ltd.KEY WORDS:wind energy;adaptive control;feedback linearization1.INTRODUCTIONThe increasing rate of consumption of fossil and nuclear fuels has drawn worldwide interest to alternative energy tely,wind power has been recognized as one of the few renewable energy sources that can o!er pollution free electricity nearly cost competitive with conventional energy methods(Godoy Simoes et al.,1997).It has been shown previously(Spe e and Enslin,1995;Novak et al.,1995)that,in grid connected applications,the e$ciency of constant speed generation systems is smaller than that of variable speed systems.So,despite the extra cost of power electronics and control,the life-cycle cost is lower.With the improvement of power semiconductors and AC drives,many di!erent con"gura-tion of variable speed WECS have been developed.Among them,one interesting option is given by the use of a slip power recovery drive.Typically,this system consist of a double output induction generator(DOIG)and a static Kramer Drive(SKD),namely:an uncontrolled bridge*Correspondence to:P. F.Puleston,Laboratorio de Electro nica Industrial,Control e Instrumentacio n(LEICI), Departamento de Electrotecnia,Facultad de Ingenier m a,Universidad Nacional de La Plata,CC91(1900)La Plata, Argentina.R e-mail:puleston@venus.".arS Professors R.J.Mantz and P.F.Puleston are also members of CICPBA and CONICET,respectively.Recei v ed16February1998 Copyright 2000John Wiley&Sons,Ltd.Accepted7May1999152 F.VALENCIAGA E¹A¸.Figure1.Schematic diagram of the WECS with DOIG.recti"er,a line commutated inverter and a smoothing reactor(see Figure1).In such con"guration the stator power is directly fed to the grid while rotor power is partially recovered through the SKD.The generator torque,and hence the system speed,can be controlled by modifying the "ring angle of the inverter(Ermis et al.,1992;Puleston,1997).In this paper an adaptive feedback linearization strategy for WECS with slip power recovery is presented.The main control objective is energy capture maximization by tracking the changes in wind speed and consequently maintaining optimum aerodynamic e$ciency.Moreover,the proposed adaptive law allows system linearization even in the presence of an imprecise turbine description.Then,the closed-loop dynamic behaviour can be determined by a simple tuning of the controller parameters.The outline of the paper is as follows.In Section2a brief description of the system and its mathematical model is ing this model,in Section3,the proposed control strategy is developed and analysed.Section4presents the simulation results.Finally,conclusions are discussed in Section5.2.FUNDAMENTALS OF WECS WITH DOIGThe amount of wind converted into mechanical power by the turbine is given by(Smith,1995)P (v, )" C (v, ) r v (1) where is the air density,r is the turbine radius,v is the wind speed and is the shaft speed.The power coe$cient C is the ratio of mechanical power delivered to total power of the captured wind.C is a non-linear function of v and ,and is highly dependent on the constructive characteristics of the turbine.Typically,it is given as a function of the tip speed ratio ,that is the ratio of turbine speed at the tip of the blade to wind speed:"r /v(2) A typical C characteristic is displayed in Figure2.It can be observed that wind turbines are most e$cient at one tip speed ratio( " ).So,to extract maximum power from the wind,Copyright 2000John Wiley&Sons,Ltd.Int.J.Energy Res.2000;24:151}161Figure 2.Power coe $cient (C )and torque coe $cient (C).the control system should modify shaft speed in order to maintain " in spite of wind #uctuation.The torque developed by the turbine can be obtained from Equation (1)¹ (v , )"P (v , ) "12C ( ) r v (3)where C ( )is the torque coe $cient of the turbine and is given by C ( )"C ( )/ (see Figure 2).Figure 3shows torque }shaft speed (¹! )characteristics of a turbine,with wind speed as parameter.The operation points of maximum power transference are marked on each curve.It can be observed that they do not match with maximum torque points (see in Figure 2that O ).On the other hand,the torque of the electrical subsystem (DOIG with slip power recovery drive,shown in Figure 1)can be controlled through the "ring angle of the KDS.The equation of the generator torque as a function of is given by (Puleston,1997)¹ "3< sR [(sR #R ) #(s ¸ #s ¸) ](4)whereR "s [n sR #(n "cos( )") R !n "cos( )"( ]((n s ) !(n"cos( )") )R "R #0.55R"2n R sR #(n sR) #n (s ¸ #s ¸ ) #(n R ) ![n "cos( )"( L # ¸)] s is the slip,< the grid phase voltage,n the ratio of stator number of turns to rotor number of turns,n the turns ratio of the output transformer,R ,R ,Rthe resistance of rotor,stator and VARIABLE SPEED WIND ENERGY CONVERSION SYSTEMS 153Copyright 2000John Wiley &Sons,Ltd.Int .J .Energy Res .2000;24:151}161Figure 3.Torque versus shaft speed characteristics of a wind turbine (¹ - )for di !erent values of windspeed.Figure 4.Torque versus shaft speed characteristics (¹- )of a GIDS-KDS for di !erent values of .smoothing reactor,respectively,¸ the leakage inductance of stator,¸ the leakage inductance of rotor, the "ring angle of the inverter, the synchronous electrical angular frequency and the synchronous rotational speed.In Figure 4torque ¹ is plotted versus speed for di !erent values of the "ring angle .The expression of the generator torque (Equation (4))can be simpli "ed,for practical purposes,by 154 F.VALENCIAGA E ¹A ¸.Copyright 2000John Wiley &Sons,Ltd.Int .J .Energy Res .2000;24:151}161using a "rst-order approximation (Puleston,1997)¹ ( , )"3< R n !3< (n "cos( )"#n ) R n"H !H u (5)where H ,y ,H are positive constants and u "1#(n /n )"cos( )".Finally,the dynamic behaviour of the WECS is described by the mechanical balance equation (Ermis et al .,1992)J "¹ (v , )!¹( , )(6)where the friction term has been neglected and J is the inertia of the rotating parts.3.CONTROL STRATEGYThe primary control objective of the proposed strategy is energy capture maximization while setting the tracking error dynamic.However,the controller design for a highly non-linear system such as a WECS (see Equation (3))can be extremely complicated.Such designing di $culties are overcome by using feedback linearization techniques.Furthermore,the development of an adaptive feedback linearization strategy is needed to deal with the frequent uncertainties in turbine characterization.So,the proposed strategy permits system linearization even in the presence of model uncertainty.The "rst step to obtain the linearizing control law is rewriting Equation (6)in the form"¹ (v , )J !H J #H J u (7)where the turbine torque ¹ is the variable to whom adaptive estimation will be applied.Choosing the control law asu "J HH J !¹ J #(8)with ¹ an estimate of ¹ and an auxiliary control input.Substituting Equation (8)into Equation (7)provides"1J (¹ !¹ )# "¹ J # (9)To maximize the energy conversion e $ciency over a wide range of wind speeds,the rotational speed must track the reference law" v r (10)in order to operate at the point of maximum energy extraction (C . ).Then the tracking error is de "ned ase " !(11)VARIABLE SPEED WIND ENERGY CONVERSION SYSTEMS 155Copyright 2000John Wiley &Sons,Ltd.Int .J .Energy Res .2000;24:151}161Substituting Equation (9)into Equation (11)an di !erentiating,givese " ! "1J (¹ !¹ )# ! (12)Now,if the auxiliary control input is selected, " !Ke ,and is substituted into Equation (12),the following results:e "!Ke #1J (¹!¹ )"!Ke #1J ¹ e "Ae #B ¹ (13)where K is a design parameter of the controller.An adjustment law for the estimation,which guarantees closed-loop stability,can be obtained by proposing an adequate Lypunov function (A strom and Wittenmark,1995;Slotine and Weiping,1991).Given that the error Equation (13)is linear and matrix A is negative de "nite,is possible to "nd a positive-de "nite matrix P such thatA 2P #PA "!I(14)Then,an appropriate Lypunov function is<"e 2Pe #¹ / (15)where the adaptation gain is another design parameter of the controller.Di !erentiatingEquation (15)gives<"!e 2e #2¹ B 2Pe #2 ¹ ¹ !2 ¹ ¹R(16)To guarantee asymptotic convergence <must be negative de "nite.In order to assure this,the second and fourth terms of Equation (16)can be cancelled by choosing the following adjustmentlaw for the estimate ¹ :¹ " e 2KJ(17)Then,Equation (16)becomes<"!e 2e #2¹ ¹(18)Even though the "rst term of Equation (18)is always negative,nothing is said about the sign ofthe second term.However,if product ¹ ¹ is bounded such that e 2e '2 "¹ ¹ "(19)convergence can be guaranteed in the region of the e !¹ plane wherein Equation (19)is veri "ed.To "nd an upper bound for ¹ ¹ implies to "nd bounds for each factor ¹ and ¹ .These bounds can be determined by knowing:(a)the extreme values of the shaft speed;(b)the extreme values of the wind speed;(c)the maximum rate of variation of the shaft speed;(d)the maximum rate of variation of the wind speed and (e)bounds for C( )uncertainty.156 F.VALENCIAGA E ¹A ¸.Copyright 2000John Wiley &Sons,Ltd.Int .J .Energy Res .2000;24:151}161The values cited in (a)and (b)are established according to the operation range of the WECS.Point (c)is determined by the desired closed-loop dynamic behaviour of the system,while point (d)is inferred from the analysis of wind data from the site.Finally,the bounds in point (e)are computed from the available information of the turbine.The equations of ¹ and ¹are obtained from Equations (13)and (3),respectively:¹ "J !J #K !K(20)¹ "12 r rv C ( )d !r v C ( )d #C ( )2vv(21)These equations can be bounded and written as"¹ " )M,"¹ " )M #M K (22)where M ,M and M are positive bounds determined from the information summarized in points (a)}(e).Conservative expressions for them are given byM "12 r rv C d #r v C d#C 2v v (23)M "J # r v (24)M " !(25)Substituting Equation (22)into Equation (19)results:e 2e '2 (M M #M M K )(26)In addition,the transfer functions of the resulting linear system are obtained from Equations(13)and (17)e ¹"S /J S #KS # /2KJ (27)¹ ¹" /2KJ S #KS # /2KJ (28)The latter expressions,together with Equation (26),show the existence of a trade o !between the desired dynamic behaviour and the size of the convergence region.So,it is clear that the control parameters (K and )must be chosen by means of Equations (26)}(28),taken both aspects into consideration.4.SIMULATION RESULTSSimulation results of the proposed strategy controlling a 30kW horizontal axis WECS with DOIG are presented in this section.The generator is connected to a 220V }50Hz grid,the inertia of the rotating parts (high-speed side)is 3.9kg m \ and theof the turbine is 51.VARIABLE SPEED WIND ENERGY CONVERSION SYSTEMS 157Copyright 2000John Wiley &Sons,Ltd.Int .J .Energy Res .2000;24:151}161158 F.VALENCIAGA E¹A¸.Figure5.Time evolution of the system variables.(a)Wind speed v.(b)Shaft speed .(c)Tracking error e. Curve1:p "!9.36and p "!0.36.Curve2:p "!2.9#j2.9and p "!2.9!j2.9.Curve3: p "!0.3#j7and p "!0.3!j7.(d)Turbine torque¹ .(e)Estimation error¹ .(f)Control action u.The wind speed pro"le used for the simulation is depicted in Figure5(a).Even though real wind does not occur as a series of"ltered steps,this time series has been used because it is a standard testing signal that permits a clear interpretation of the system behaviour.In Figures5(b)and5(d)the evolution of the shaft speed and the turbine torque are plotted.The variation of shaft speed follow the variation of wind speed in order to operate at constant " .In correspondence with Figures5(b)and5(d),Figures5(c)and5(e)show the tracking error e and the estimation error¹ for di!erent values of the controller parameters.In curve(1)K"10Copyright 2000John Wiley&Sons,Ltd.Int.J.Energy Res.2000;24:151}161VARIABLE SPEED WIND ENERGY CONVERSION SYSTEMS159Figure6.Wind power captured.Variable speed WECS controlled by the proposedstrategy(solid line).Fixed speed WECS(dashed line).and "1800,in curve(2)K"5.28and "3060and in curve(3)K"0.6and "900.The closed-loop poles given by Equations(27)and(28)are,respectively,placed in:(1)p "!9.36 and p "!0.36,(2)p "!2.9#j2.9and p "2.9!j2.9and(3)p "!0.3#j7and p "!0.3!j7.It can be observed that the closed-loop error responses go from overdamped to oscillatory as they were speci"ed in the design.The evolution of control action u is displayed in Figure5(f).To assess the e!ectiveness of the proposed strategy controlling a variable speed WECS,the wind power captured by the system under consideration is compared to that of a WECS with cage induction generator directly connected to the grid.The latter is the most widespread architecture among"xed speed wind turbines.Figure6shows that the power captured by the variable speed WECS always surpasses(or at least equates)that of the"xed speed WECS.The aerodynamic e$ciencies of both systems only match during the interval42s(t(54s.The reason is that a"xed speed system is capable to maintain " at only one wind speed.For this particular case it was designed for v"10.5m s\ .A presentation in the torque versus shaft speed plane may help to clarify this concept(Figure7). The torque-speed characteristics(for di!erent wind speeds)and the points of maximum aerody-namic e$ciency are plotted in dotted and dashed lines,respectively.In Figure7(a)the DOIG torque characteristics(for di!erent values of the"ring angle)are represented in dot and dash, while the evolution of the turbine torque of the variable speed WECS is in solid line.In the same manner,Figure7(b)presents the cage induction generator torque characteristic and the evolution of the turbine torque of the"xed speed WECS.Operation points A}G and a}g are in correspondence with the steady-state intervals indicated in Figure6.It can be observed that the proposed controller makes the system move over theCopyright 2000John Wiley&Sons,Ltd.Int.J.Energy Res.2000;24:151}161160 F.VALENCIAGA E¹A¸.Figure7.Torque versus shaft speed representation.Torque-speed characteristics for di!erent wind speeds (dotted lines).Maximum aerodynamic e$ciency locus(dashed line).(a)DOIG torque characteristics for di!erent values of the"ring angle(dotted and dashed lines)and turbine torque evolution of the variable speed WECS(solid line).(b)Cage induction generator torque characteristic(dotted and dashed lines)and evolution of the turbine torque of the"xed speed WECS(solid line).maximum e$ciency locus.On the other hand,the"xed speed system shifts over the cage induction generator characteristic,being able to intersect the maximum e$ciency locus only at point d.Copyright 2000John Wiley&Sons,Ltd.Int.J.Energy Res.2000;24:151}161VARIABLE SPEED WIND ENERGY CONVERSION SYSTEMS1615.CONCLUSIONSA control strategy to optimize power generation of variable speed grid-connected WECS was presented.The proposed controller is based on feedback linearization theory in order to deal with a system of highly non-linear characteristics.Adaptive features were required to enable the feedback law to linearize the system even while facing uncertainties in the turbine description. Consequently,the dynamics of the tracking error and the turbine torque estimation error can be easily assigned by tuning two control parameters(K and ).However,it is demonstrated that the region where convergence is guaranteed also depends on these parameters.An expression establishing this relationship is provided.Through it,the trade o!between the desired dynamics and the size of the convergence region can be taken into consideration in the design procedure.The e!ectiveness of the control has been demonstrated through the use of computer simulation. The improvements in energy conversion e$ciency have been shown comparing the energy captured by the system under consideration to that of a WECS with cage induction generator directly connected to grid(the most widespread architecture among"xed speed wind turbines). Finally,it is important to remark that even though calculations were made for a particular variable speed WECS,the ideas behind the control strategy developed in this paper are general and can be readily extended to other variable speed wind energy conversion topologies.REFERENCESAkpinar E,Trahan RE,Nguyen AD.1993Modeling and analysis of closed-loop slip energy recovery induction motor drive using a linearization technique.IEEE¹ransactions on Energy Conversion8(4):688}696.A stro m K,Wittenmark B.1995.Adaptive Control.Addison-Wesley:Reading MA.Ermis M et al.1992.Various induction generator schemes for wind electricity generation.Electric Power Systems Research 23:71}83.Godoy Simoes M,Bose BK,Spiegel RJ.1997.Fuzzy logic based intelligent control of a variable speed cage machine wind generation system.IEEE¹ransactions on Power Electronics2(1):87}95.Novak P,Ekelund T,Jovik Y,Schmidtbauer B.1995.Modeling and control of variable-speed wind-turbine drive system dynamics.IEEE Control Systems Magazine15:28}37.Puleston PF.1997.Control of WECS with double output induction generator.Ph.D.¹hesis,EE Department,National University of La Plata,Argentina.Slotine JJ,Weiping Li.1991.Applied Nonlineal Control.Prentice-Hall:Englewood Cli!s,NJ.Smith GA.1995.Power electronics for recovery of wind and solar energy.=ind Engineering19(2):53}66.Spe e R,Enslin JH.1995.Novel control strategies for variable-speed doubly fed wind power generation systems. Renewable Energy6(8):907}915.Copyright 2000John Wiley&Sons,Ltd.Int.J.Energy Res.2000;24:151}161。