安全稳定控制装置的发展现状及展望
现代电网运行技术(第四章安控装置)

信号处理与传输过程
处理后的数字信号通过内部总线传输到控制单 元,控制单元根据预设的控制策略进行分析和
判断。
安控装置的状态信息和电网实时信息通过通信单元上 传到上级调度中心,实现远程监控和操作。
采集单元将采集到的模拟量转换为数字信号, 并进行必要的滤波和处理,以消除干扰和噪声 。
控制单元根据分析结果发出控制指令,控制指令 通过内部总线传输到执行单元,执行相应的操作 。
03
安控装置在电网运行中的 应用
电力系统稳定控制
01
02
03
负荷控制
通过安控装置实时监测电 网负荷,采取相应措施如 切负荷等,确保电力系统 稳定运行。
频率控制
安控装置能够监测电网频 率,通过自动调整发电机 出力等方式,维持系统频 率在允许范围内。
电压控制
通过安控装置对电网电压 进行监测和调整,保证电 压质量,提高电力系统的 稳定性。
安控装置在电网运行中的应用案例
通过多个实际案例,分析了安控装置在电网运行中的应用情况,包括在不同场景下的应用效果和 存在的问题。
学员心得体会分享
加深了对安控装置的理解
通过本次课程的学习,我对安控装置有了更深入的了解, 包括其基本概念、工作原理和在电网运行中的应用等。
提高了分析和解决问题的能力
在学习过程中,我通过分析案例和模拟实验等方式,提高了自己 分析和解决问题的能力,对今后的学习和工作有很大的帮助。
现状
目前,安控装置已经成为电力系统不可或缺的一部分,广泛 应用于发电、输电、配电等各个环节。同时,随着新能源、 智能电网等技术的快速发展,安控装置也在不断升级和完善 ,以适应电网运行的新需求和新挑战。
在电网运行中的重要性
保障电网安全稳定运行
智能PID控制的发展现状及应用展望
智能PID控制的发展现状及应用展望智能PID控制(Proportional-Integral-Derivative control)是一种常见的控制算法,广泛应用于工业自动化领域中。
它通过测量控制系统的误差来调整输出,使系统的实际值尽可能接近期望值。
随着科技的不断进步和发展,智能PID控制在控制领域也得到了广泛的应用和发展,为工业生产和自动化领域带来了诸多益处。
本文将从智能PID控制的发展现状和未来应用展望两方面进行探讨。
1.传统PID控制的局限性传统的PID控制算法是通过比例、积分和微分三项参数来调节控制系统的输出,但是在实际应用中,传统PID控制算法存在许多局限性。
传统PID控制算法对于非线性和时变系统的控制效果不佳,不适用于复杂的工业生产系统。
传统PID控制无法满足对控制精度和稳定性的要求,容易受到外部扰动的影响。
2.智能PID控制的发展趋势随着人工智能和大数据技术的不断发展,智能PID控制算法应运而生,成为控制领域的新宠。
智能PID控制算法采用了模糊逻辑、遗传算法、神经网络等先进技术,可以更好地适应非线性和时变系统,提高了控制系统的鲁棒性和鲁棒性。
适应性,同时提高了控制系统的稳定性和精度,在实际工业生产中具有广阔的应用前景。
3.智能PID控制的应用领域智能PID控制在工业自动化控制、机器人控制、电力系统控制、交通运输系统控制等领域都得到了广泛的应用。
在工业自动化控制中,智能PID控制算法可以实现对生产过程的精准控制,提高生产效率和产品质量。
在机器人控制领域,智能PID控制可实现对机器人动作的精确控制,提高了机器人的灵活性和适应性。
在电力系统控制中,智能PID控制可以实现对电力负载的平稳控制,提高了电力系统的稳定性和安全性。
二、智能PID控制的未来应用展望1.智能PID控制在工业4.0中的应用随着工业4.0的到来,智能PID控制将会得到更广泛的应用。
在智能制造和工业网络化的背景下,智能PID控制可以实现对生产过程的智能化控制和管理,提高了生产效率和产品质量,有助于企业实现智能制造的转型升级。
华中电网稳定控制系统的回顾与展望
第l卷 5
华 中 电 力
20ቤተ መጻሕፍቲ ባይዱ年 02 增刊
华 中电网稳 定控 制 系统 的 回顾 与展望
张 德 泉
( 中 电力 调 度 通 信 中心 , 北 武 汉 华 湖 407) 30 7
摘 要 : 中 电网 的稳 定控 制 系统研 制 和投 运 起 步较 早 、 类较 多 , 华 中 电 网安 全稳 定 运行 2 华 种 对 0周 年作 出 了积 极 贡献 。 对华 中电 网稳 定控 制 系统 的发 展 历程 、 状作 简要 的 回顾 与展 望 , 现 并提 出一 些建议 。
安 全 稳定 运 行 2 0周年 。 目前 , 它通 过 葛 洲 坝~ 海 上 南桥 + 0 V直 流输 电线路 与 华东 电网联 网 ,通 过 50k 50k 0 V交 流输 电线路 与 J 渝 电 网联 网 , I I 已形成 国 内 最 大 的互联 电 网。 随着 国家 “ 电东 送 、 北 互供 、 西 南 全 国联 网” 的 发展 战略 和 三峡 工 程 的建 设 投 产 , 华
波通道逐级传递 , 现切负荷 、 实 低抗 , 上 低 周 、 加 低
压 、 荡 解 列 和低 周 减 载 第 三 道 防 线 , 本 上 维 持 振 基 了华 中 电网 的安 全稳 定运 行 。 稳 定装 置 的可靠 性 和 快速 性 犹 如 鸟之 两 翼 、 车 之 两 轮 , 可或缺 。保 护误 动 、 置元 器件 损 坏和 通 不 装
11 常规 稳定 装 置 .
早在 2 0世 纪 8 0年代 ,由 于 网络 结 构 薄弱 、 电 网稳 定 水 平 较 低 , 洲 坝 电 厂 、 河 、 凰 山 、 孟 葛 双 凤 姚 电厂 等 厂站 和 部分 2 0k 2 V厂 站均 装 设 了常 规 的 系 统 稳 定装 置 。 些 稳定 装 置 的原 理 、 这 构成 均 很 简单 : 由保 护装 置 的 出 口跳 闸 接 点 ( 或断 路 器辅 助 接 点) 、 相 应 二 次 回路 、 发信 通 道 、 动 中间 继 电器 等 构 收 重 成 。 端 实 现切 机 、 送 投切 制 动 电阻 , 端通 过 J T载 受 Y
汽车制动控制技术发展现状及展望
汽车制动控制技术发展现状及展望
近年来,随着汽车工业的迅猛发展,汽车制动控制技术也得到了快速的发展。
汽车制动控制技术主要包括ABS、ESP、EBD、BA等功能,它们的出现和发展,极大地提高了汽车的安全性能和行驶舒适性。
ABS是一种防抱死制动系统,它通过传感器检测车轮速度,一旦发现车轮即将抱死,ABS系统就会自动调节刹车压力,保证车轮不会抱死,有效避免了制动距离过长和车辆失控的风险。
ESP是电子稳定控制系统,它通过传感器检测车辆的转向角度、速度以及横向加速度等参数,一旦发现车辆出现侧滑或失控现象,ESP 就会自动调节车辆的制动力和引擎输出功率,保持车辆行驶方向的稳定,提高驾驶安全性。
EBD是电子制动力分配系统,它能够根据车辆的负荷情况和车速等因素,自动调节前后轮刹车力的分配比例,保证整个制动过程的平衡和协调,提高了制动效果和行驶稳定性。
BA是紧急制动辅助系统,它能够在紧急制动时,自动增加制动压力,缩短制动距离,提高制动效果,有效避免了紧急情况下的车辆碰撞风险。
未来,随着智能化技术的不断发展,汽车制动控制技术也将会得到更加深入的发展,例如,基于车辆自动驾驶技术的制动控制系统,将会实现更加精准和智能化的制动控制,提高驾驶安全性和乘坐舒适性。
- 1 -。
广域保护(稳控)技术国际现状及展望
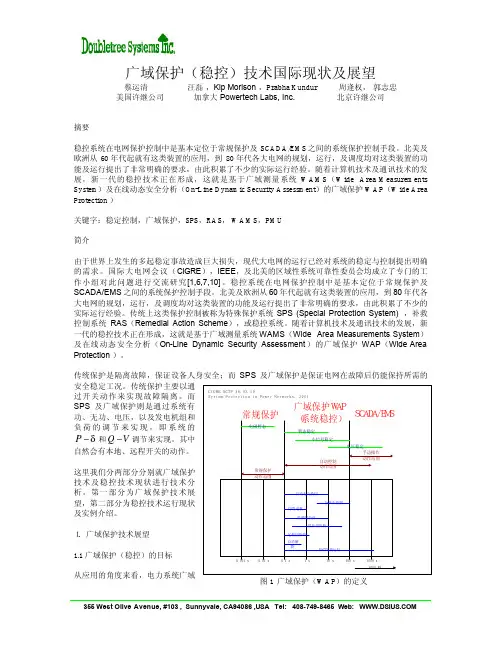
广域保护(稳控)技术国际现状及展望蔡运清汪磊,Kip Morison ,Prabha Kundur周逢权,郭志忠美国许继公司加拿大 Powertech Labs, Inc. 北京许继公司摘要稳控系统在电网保护控制中是基本定位于常规保护及SCADA/EMS之间的系统保护控制手段。
北美及欧洲从60年代起就有这类装置的应用,到80年代各大电网的规划,运行,及调度均对这类装置的功能及运行提出了非常明确的要求,由此积累了不少的实际运行经验。
随着计算机技术及通讯技术的发展,新一代的稳控技术正在形成,这就是基于广域测量系统WAMS(Wide Area Measurements System)及在线动态安全分析(On-Line Dynamic Security Assessment)的广域保护WAP(Wide Area Protection )关键字:稳定控制,广域保护,SPS,RAS, WAMS,PMU简介由于世界上发生的多起稳定事故造成巨大损失,现代大电网的运行已经对系统的稳定与控制提出明确的需求。
国际大电网会议(CIGRE),IEEE,及北美的区域性系统可靠性委员会均成立了专门的工作小组对此问题进行交流研究[1,6,7,10]。
稳控系统在电网保护控制中是基本定位于常规保护及SCADA/EMS之间的系统保护控制手段。
北美及欧洲从60年代起就有这类装置的应用,到80年代各大电网的规划,运行,及调度均对这类装置的功能及运行提出了非常明确的要求,由此积累了不少的实际运行经验。
传统上这类保护控制被称为特殊保护系统 SPS (Special Protection System) ,补救控制系统 RAS(Remedial Action Scheme),或稳控系统。
随着计算机技术及通讯技术的发展,新一代的稳控技术正在形成,这就是基于广域测量系统WAMS(Wide Area Measurements System)及在线动态安全分析(On-Line Dynamic Security Assessment)的广域保护WAP(Wide Area Protection )。
电网安全稳定控制装置标准化设计
2010年第4卷第1期南方电网技术交直流并联电网2010,V ol. 4,No. 1 SOUTHERN POWER SYSTEM TECHNOLOGY AC/DCParallelGrid 文章编号:1674-0629(2010)01-0039-04 中图分类号:TM712 文献标志码:A电网安全稳定控制装置标准化设计陈兴华,吴国炳,张荫群,李新超(广东省电力调度中心,广州510600)摘要:基于“个性化和差异化最小”原则,并结合对电网稳控系统多年的设计、调试和运行经验,从功能设计、通信接口设计、定值单设计、压板设计以及现场接线设计等方面,提出稳控装置标准化设计的参考标准。
关键词:安全稳定控制;装置;标准化The Design Standardization of Security-Stability-Control Deviceof Electric Power GridCHEN Xinghua, WU Guobing, ZHANG Yinqun, LI Xinchao(Guangdong Power Dispatch Center, Guangzhou 510600, China)Abstract: Based on the principle of “the least personalization and difference” with the experiences of design, test, and operation ofsecurity-stability-control systems for the electric power grid, this paper puts forward reference standards for the design standardizationin the aspects of function design, communication interface design, setting value design, pressure plate design and site wiring design.Key words: security and stability control; device; standardization电网的安全稳定控制系统和装置是提高电网安全稳定性的有效措施[1]。
由巴西3.21大停电谈电力系统稳定控制整体解决方案
由巴西3.21大停电谈电力系统稳定控制整体解决方案事故原因为:定值误整定造成断路器过负荷跳闸,引起交流母线失压,进而造成美一直流双极停运,在交流母线失压情况下,稳控装置认为切机信号无效,美丽山水电站机组因自身保护而切除。
事故造成北部和东北部电网解列,南部、东南部以及中西部电网因低频策略动作而切负荷。
最终损失负荷是事故前美一直流输送功率的5倍。
此次事故启示我们:(1)重视稳控系统、低频低压减载、高周切机、振荡解列方案的研究和三道防线的建设;(2)研究在线实时稳定控制系统,解决稳控策略失配问题。
2 稳定控制技术的现状电力系统稳定控制是指为防止电力系统由于扰动而发生稳定破坏、运行参数严重超出规定范围,以及事故进一步扩大引起大范围停电而进行的紧急控制,构成了电力系统的第二道防线和第三道防线。
电力系统稳定控制的类型包括暂态稳定控制、动态稳定控制、电压稳定控制、频率稳定控制和过负荷控制。
根据策略实现方式采取技术路线的不同,稳定控制系统分为如下三类:(1)技术人员采用离线仿真软件工具(如BPA、PSASP等)开展大量的仿真计算,通过分析、归纳、总结,形成包含运行方式、故障元件、故障类型、稳定控制措施、定值等关键字段的策略表,交由稳控装置设备厂家开发人员编程(或配置)实现。
实际运行时,通过判断运行方式、故障元件和类型,实时匹配离线策略表,找到相应的控制措施,并动作出口。
基于离线策略表的稳定控制系统已得到了大量应用,技术最成熟,是目前的主流实现方式。
但这类稳定控制系统存在离线工作量大,控制措施的过量或欠量受策略制定技术人员的经验和性格影响,在实际运行中存在策略失配的问题。
(2)基于在线预决策的稳定控制系统:在线预决策系统定周期(典型时间取5分钟)地从数据采集与监控系统(SCADA)获得电网运行状态数据,基于预想故障集,开展在当前运行方式下的稳定性评估,对于失稳的情形,搜索控制措施集,形成稳控策略表,刷新现场稳控装置中存储的策略表或定值。
机电控制技术的发展现状与展望
机电控制技术的发展现状与展望1. 引言1.1 背景介绍机电控制技术是指利用电子技术、自动控制技术和机械传动技术相结合,用以实现对机械设备运行状态和运行过程的控制和监测。
随着科技的不断发展和进步,机电控制技术在各个领域得到了广泛应用,并且在工业自动化、智能家居以及军事领域等领域发挥着重要作用。
背景介绍是为了让读者了解到机电控制技术的重要性和应用范围。
现代工业已经离不开机电控制技术,它可以提高生产效率,降低成本,保障安全生产。
而在智能家居领域,机电控制技术可以实现设备的智能化控制,带来更加便利和舒适的生活体验。
在军事领域,机电控制技术可以用于开发和制造各种武器装备,提高军队作战能力。
通过对机电控制技术的背景介绍,可以让读者了解到这一技术领域的重要性和广泛应用范围,为后续的内容展开奠定基础。
1.2 研究意义机电控制技术的研究意义主要体现在以下几个方面:1. 提升生产效率:随着科技的发展,机电控制技术在工业生产中起到了至关重要的作用。
通过自动化控制系统,可以实现生产过程的智能化和高效化,提升生产效率,降低成本,提高产品质量。
2. 促进技术创新:机电控制技术的不断发展推动了各行业技术的创新。
在工业领域,机电控制技术的应用促进了智能制造、数字化生产的发展;在智能家居领域,机电控制技术的应用带来了智能化、便捷化的生活体验;在军事领域,机电控制技术的应用提高了武器装备的作战能力。
3. 保障安全稳定:机电控制技术在工业、家居和军事领域的广泛应用,可以提高设备和系统的安全性和稳定性,减少人为失误,降低事故风险,保障人身和财产安全。
机电控制技术的研究意义在于推动科技进步,提高生产效率,促进经济发展,改善生活质量,保障安全稳定。
随着社会的不断发展,机电控制技术的作用和意义将会越来越重要,值得我们深入研究和探讨。
2. 正文2.1 机电控制技术的现状分析机电控制技术是指通过电器和机械设备相结合实现自动化控制的一种技术。
随着科技的不断发展,机电控制技术在近年来取得了显著的进步和发展。
配网运维安全管控
对未来配网运维安全的展望
智能化技术的应用
随着人工智能、大数据等技术的 不断发展,未来配网运维安全管 控将更加智能化。通过智能算法 对历史数据进行分析和挖掘,可 以实现对设备状态的实时监测和 预测,提高运维效率和准确性。
新能源接入的影响
随着新能源的大规模接入,配网 的运行特性将发生显著变化。未 来配网运维安全管控需要充分考 虑新能源的接入对配网的影响, 制定相应的管理策略和技术措施 ,确保配网的稳定运行。
配网运维安全管控
汇报人:XX 2024-01-10
目录
CONTENTS
• 配网运维安全概述 • 配网设备安全运行管理 • 配网线路安全运行管理 • 配网系统安全运行管理 • 配网自动化技术应用及安全管控 • 配网运维安全风险评估与防范策略 • 总结与展望
01
CHAPTER
配网运维安全概述
配网运维安全的重要性
风险分析
对识别出的风险进行量化评估,确定风险等级和影响程度。
风险评估报告
生成详细的风险评估报告,为制定防范策略提供依据。
针对不同风险等级的防范策略制定
高风险
01
采取紧急措施,如立即停运、更换设备、加强巡检等,降低风
险至可接受水平。
中风险
02
制定详细的风险管控计划,明确责任人、时间表和监控措施,
确保风险得到有效控制。
保障电力供应稳定
提高运维效率
配网是电力系统的重要组成部分,其 安全稳定运行直接关系到电力供应的 可靠性和稳定性。
通过配网运维安全管控,可以规范运 维流程,提高运维效率,降低运维成 本。
防止安全事故发生
配网运维过程中的安全隐患若不及时 处理,可能引发严重的安全事故,对 人身安全和财产安全造成威胁。
司钻防提断装置—关井井控防误操作装置
司钻防提断装置—关井井控防误操作装置1. 引言1.1 背景介绍司钻防提断装置是一种用于控制及防止意外井口断裂或漏油的装置,其设计是为了确保钻井作业过程中的安全性和顺利进行。
随着石油勘探和开发的不断深入,对井口操作的要求也越来越高,因此开发出一种高效可靠的防提断装置就显得尤为重要。
通过对相关的技术进行研究和实践,可以有效减少因井口断裂或漏油而导致的事故发生,保障工作人员的生命安全和设备的完好性。
司钻防提断装置的研究不仅有助于提高作业效率,还能降低作业风险,是石油行业中不可或缺的一部分。
研究并推广司钻防提断装置具有重要的意义和价值。
1.2 研究目的研究目的:通过深入探讨司钻防提断装置和关井井控防误操作装置的设计、应用与安全性能评估,旨在提高钻井作业的安全性和效率。
具体目的包括:1. 分析司钻防提断装置的原理和工作机制,为设计关井井控防误操作装置提供理论基础;2. 提出关井井控防误操作装置的设计方案,探讨其在实际钻井作业中的应用效果;3. 通过对关井井控防误操作装置的安全性能评估,验证其在提高钻井作业安全性方面的效果;4. 通过实验结果分析,总结关井井控防误操作装置的优势和不足,为未来的钻井作业提供参考依据;5. 最终旨在为钻井作业的安全和效率提供技术支持,促进钻井行业的可持续发展。
1.3 研究意义司钻防提断装置和关井井控防误操作装置在石油钻井作业中具有重要的作用。
研究意义主要表现在以下几个方面:1.提高钻井作业安全性:司钻防提断装置和关井井控防误操作装置的使用可以有效避免因操作失误或设备故障而导致的意外事故发生,保障工作人员和设备的安全。
2.提升作业效率:通过引入这两种装置,钻井作业中的操作流程更加顺畅,减少了人为干预的机会,提高了作业效率,缩短了作业周期,降低了作业成本。
3.促进技术创新:研究司钻防提断装置和关井井控防误操作装置的原理和设计方案,有助于推动相关领域的技术创新,为钻井作业提供更加智能化、高效化的解决方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
q" & ’ ? ) 0 1 ! ? R c d * v 9 #% ()ST5)*O < # b x G 1 { & ’$8 # b C ? t&’\]g$8< o f H I A u i [ " N P C j |!jL 7 H R } . S M l C J K H I 9 U’() S T 5) * O R . ( C i . b 5 # b C % 1 = ’ $[ " 1{pHI9UC8<ofHIYZ*:8&’5 %zUD’()). * x G < " = ’ C c 1 ] ^$5 " }(SMl^}.SMl9UC%1{ofHIA u#bUD%Qz" 6 (z 9 H)| ! C L 2$q " &’wo9#G R ? /)))\B R / < ’ C < " % =’\]$8<of H I A u 3 0 A [ " z { l m HI9UCYA9#%
(#1 { ; 8 < o f H I A u % & 4 Y Z } ( S Ml>qY‘?‘ g & % > ~ !$? X Z Y Z C o f()%]L/W F 9 U$V z ] \ p H I C 0 D , 0 Y Z 0 D I C L ~ p - $\ p L ~ ( ) , Y $< 8N[,YgUXZYZof()C";;o]) ? G $\ p ? G \ b A 8 s U C B H $o h > o & 1 {p8<ofHIAu4L/%,E1{;8<o fHIAu+,T 9 F 1 { 0 D C ( ) X Y$. U Uq<1{CYZ o f p$h > A 8 C 1 2 > 8 L ‘9{~3Z~C()GY^DRCof()+_ ])?G$] X Z Y Z C o f$a g U w G 1 2 &
EF"<=*i%vj#5kPW#kU)#+4~[#%#4>kXo^lcl 78#f >kR7h 0u_F/#rj9%#R7X$>kX4#(-m7 F # . - m 7% l m ! . . S g$t o$n o}:h0wo{+-=*%&r>kR7h0u_ 4~[F e G#s R S W c % # 4 u _ F ~ [xyr>kR7h0u_4~[=1%
(8 l G b c )H I Y = > N [ ? G g ) C o f H I Y = $U n & ’ C 9 # !Y Z G Y C Z i [ " k /Up%o&(KL G R!L ~ : :)C j k L / & 4 Y Z A / U !0 i ^ l m C o f H I $? g Z C m lHIc~#CHIY=["Og?uC0Sp% 8lGbcY=J 8 * v % z U D & u 5$. 7 8 bF&’<()%
! ! ! ! ! ! ! ! ! !())+$(A"(.#! !
L ‘ ‘ $ ] ^ ‘ B !‘ ~ ! 7 $W 9 H I Y = N P g T%Qz&’C% = ’ < G m J V C K %$N P C fwDuHIY= 7 O U | } H I C ! ]$o & c ~#CY=4L/&’CJKHI7GRN[1{ pofHIC\ 5% X R C o f H I c ~ > (L ~ xy!L~::)% h >$8 Z [ x y B j k : 2 ^ HIbcyl:2 g$] ( 8 5 e H 8 l x y 8 H Ic~]t?L /% . U$L ~ C D m o f J K H I8A~6I] t ? L /% N [$c E c ~ # C D m o f J K H I b c Y = \ ] " (m l b c !L ~ : :)^(8lGbc!L ~ : :)( 9 b c Y = % +3, 8 HIY=@\]aDo&mlxyP8Cc~#C x=$.7q8bF H I Y Z @ ; p | 8 l G b c C9U % +G,
8<ofHIAu\pu_\]IGg??R ?g.:&
/#< 5 = 8 < o f H I A u % o h , / F P X B H R H I b $~ X T " C a r !? n !x y !H I E 8 7 $T " 9 U 0 , 9 F A u a E l G $m t H @ u 8&4YZ5Ca E c _ 2 m$L / + H J K H I 9U%
H I c ~ < & ’ C W l Y = !4 5 X Y !L ‘ Y =fXRBH,Y7b9.>"zWhMeCWl p;Y%+H;H I d =$a < + H p - < D f C + w ] ) ? G $y " N P C f w D u $A N P C l P
A(
!!!!!!!!!!
x 1 2 3 ’())+I)GI/*&4 5 2 3 ’())+I)AI/+%
#$"I‘8A.L / & ’ 8 < o f C 8 l L ~ > = 5 L ~ H I Y Z q g | O i 1 2 q r+(,$W @ 0 R718<of^Dx1pUC8<ofHIYZ 7k|5O P % +., 1 8 o p \ X 6 X!% J V ^ c b^1893op ’ v C 9 #$Q P 8 < o f H I Au,-4NPCcE5QPXBCaEAu*: 9#GR?.(QP X B R \ C ? @ = o f H I A u$u_^3_c 1 @ L / | 4 5 i!d e i!4 A =\] % +*,
} (A (!} (. M ())+ * /( N /) 0 ! ! ! !
B7CD(A!E7D(.
!!!!! F<6D/)$())+
A/
mIMZ()N\>q\/o8\]
j 0 J != / p !1 2 3 !4 5 6 !7 8 9 !n : ; !< [ ; != > ?
""&ABiVK)*Iy<H./$0$?I3P (/))).#
G H I "> k R 7 h 0 &r H R 7 &w o p &t 7 > a w
J / K L M "$#G/(
!! N O
JKHICc1OR+>Z&’XT%fBs 8/JKX m ~$x ) ‘ B!‘ ~ ! 7 J K H I 1 2$QYZL M T J h ( ) X m % +/, 8 & 4 Y Z A D8<ofJKH I A u$> 7 1 & 4 Y Z 8 < o f p !M 0 & ’ o f K L !M t 9 { % Z q J & K L C") 1 2%())+ * + N (+ 0 - # T % J &! ())+*3N((0yQ% J & f ()). * 5 N /* 0 -j%J&$Qq% { ? 6 @ T & U 8 / O s + 5 CB]HD%/O&4YZCL~pfYMepQ Pn&4YZgT p!8 < p C ] J h T | 9 F d [C1n%8<ofHIAu>te&4YZ8< of^gT())OgiC}(SMl^}.SM l%
"‘oh38<ofHIAuHR$.CO& XRAu "0!0#> 7 9 H I Y Z "4K0#$8 O & X RC23@()9@yl^HIue?L/Dmo f C H I N C++,$$ " H R ( D C 8 < o f H I A uC$A0168./C 00& 7%
#! m I M Z ( ) N \ > ( ) } X
(#< 5 ? k = 8 < o f H I A u% x y B j k!/Qt l j k C 9 # Q b F &!2 , ~ . ) G HGRgU$&s8 / | < 5 ? k = 8 < o f H I Au % +., bF &!2"g Q B#, ~ . ) ( ) ~ X b F p - C a r !x y ^ N P C ? n $3 \ b @ F T 5 >HIb$5>HI b , 0 * &!2 @ F C p -$E 8HI=n%bF &!2 > d _ 8 A 8 9 F K ? > HI@I%
N[$o p j k ^ / Q t l j k 7 q g ? N / Qtl"#GRd e m C o p t l$< 5 ? k = A u5C/QtlgU9#GR1893opWo$ [j?@=C$j%s?@=AuC‘m>\m$ gU><5?k=$x G 9 F s n M e C o f H I 5\][Y%
8<ofHIAu8"I‘7q"b*CU D % 8 " I $U 8 } . S M l @ 7 q P T 6 f $m 8 *HR}(SMlC1{pC8<ofHIAu$ P T % 4 9 # $K ? _ 5 8 < o f H I !6 6 F 8 8 < o f H I G u !I Y & ’ z _ 8 H G u !0 $ $ ! 8H7YS%;8 < o f H I G u 0 8 g T!o f ( ) $. J e B H b C $R X ‘ q " & ’ o f ( ) A 8|B]7e%8 " I U D G b![ " O # p C { _ G 6 " I y o f !I y O X !" & I A !! 3 K Y ! &T)"OX016 8 C u _#7$& % C O # p _ ‘ ? C R H-dI.))$4&0IAA(K$&00I/))Z%$00&I +/)$%#-dI())) 7 %