GPS静态控制测量网平差报告
GPS静态控制测量的成果分析

GPS静态控制测量的成果分析GPS静态控制测量的成果分析根据《全球定位系统(GPS)测量规范》(以下称《规范》)的要求,从三大部分去的评估与分析测量成果即:基线质量检核,外业成果质量检核和平差成果分析三大部分。
1.基线质量检核:在基线质量检核前应该先明确外业控制测量所要求达到的等级。
根据《规范》规定各等级网相邻点间基线长度精度用以下公式表示:Ó=[a2+(b·D)2]1/2 其中,Ó-标准差,mma-固定误差,mmb-比例误误差系数D-相邻点的距离,KM《规范》中规定在进行C级以下各级GPS网解算中,15KM内的基线,须采用双差固定解。
15KM以上的基线允许在双差固定解和双差浮点解中选择最优结果。
一般GPS 商用软件在进行基线处理前要对基线处理进行设置。
GPS处理软件默认的双差固定解合格基线方差比(ratio)大于3.0,一般说来在基线10公里以内,基线方差比满足此条件,可以认为是符合《规范》中等级网的测量要求的。
随着基线长度的增加,其中误差也相对会有所增加。
如果仅作为加密控制,或者要求较低的情况下也可以相对方宽条件,例如方差比为2 .0,这都是符合《规范》规定的。
2.外业成果质量检核外业质量检核是确保预期平差精度要求的重要环节:(1)重负基线边检核。
在C级以下各级GPS网基线处理,复测基线的长度较差ds应小于相应级别规定精度的2√2倍。
而其中任一时段的结果与各时段平均值之差不能超过相应级别的规定精度。
(2)同步环闭合差检核。
《规范》中对同步闭合环的要求为Wx≦√3/5ÓWy≦√3/5ÓWz≦√3/5Ó各级同步环闭合差规定表如下:等级限差类型二等三等四等一级二级坐标分量相对闭合差 2.0 3.0 6.0 9.0 9.0环线全长相对闭合差3.0 5.0 10.0 15.0 15.0例如,静态处理软件3.0中采用环线全长相对闭合差作为同步环的检核指标,当要求的控制网为四等控制网时,同步环的的限差应该在10ppm以内。
GPS实验报告
实验一:GPS静态测量实验实验目的: 1、掌握天宝GPS接收机的操作。
2、掌握GPS静态相对定位数据采集方法.3、掌握卫星预报软件的使用方法.4、掌握数据传输与后台处理软件的使用方法。
实习任务:对已有控制点进行多时段静态测量实验步骤:●放置脚架,对中整平,安置好仪器.●量取天线高●打开接收机电源,接收机跟踪大于4颗以上卫星时,卫星指示灯慢闪;打开数据记录灯;此时开始记录数据。
(注:一定要保证数据记录灯亮,否则没有记录数据)●认真填写外业记录表●结束测量时,先关闭数据记录灯,再关闭接收机电源。
2。
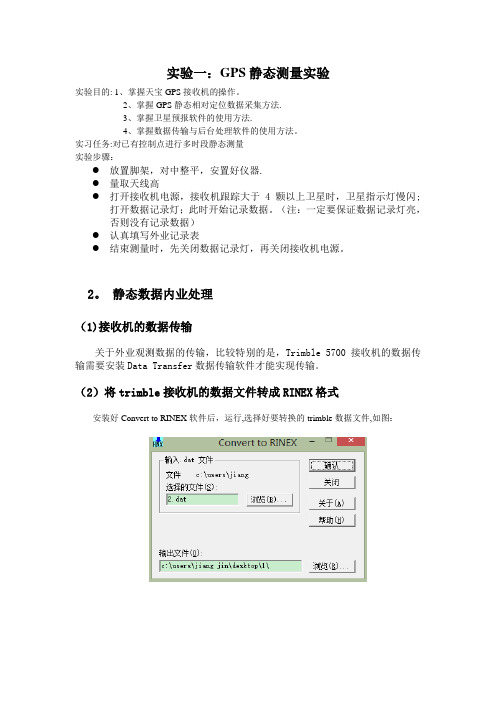
静态数据内业处理(1)接收机的数据传输关于外业观测数据的传输,比较特别的是,Trimble 5700接收机的数据传输需要安装Data Transfer数据传输软件才能实现传输。
(2)将trimble接收机的数据文件转成RINEX格式安装好Convert to RINEX软件后,运行,选择好要转换的trimble数据文件,如图:点击“编辑”,对相关参数进行设置,选择观测方法为“护圏的中心”,并根据外业观测记录表,填好初始天线高,点击“改正”即可。
设置完成后,就是进行格式转换了。
(3)HGO软件,新建项目,选择相应的坐标系统如图:(4)处理基线观测残差序列图和基线处理这一个环节,主要是通过查看基线的残差序列图来初步判断该基线的质量好坏。
质量控制只作为了解,是基线解算质量的三个恒量标准,即比率(ratio)、均方根(RMS).我们主要通过屏蔽某段信号或者某颗卫星的信号来使得ratio 值和 RMS值增大,ratio值越大越好,信号好的话,ratio值一般在50-100之间。
RMS值越小越好,信号好的话,RMS值一般会在0。
005左右。
如图:未屏蔽信号前:ratio值为16,RMS值为0.0062屏蔽信号,修复完成后,ratio值为99,RMS值为0。
0045。
这里要特别注意的是,在屏蔽卫星信号时,必须保证同一观测时段必须有不少于4颗卫星。
GPS控制测量各种要求规范限差
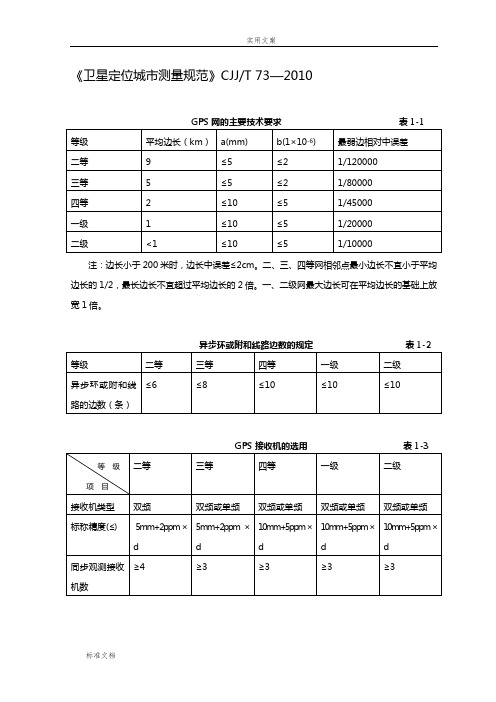
《卫星定位城市测量规范》CJJ/T 73—2010注:边长小于200米时,边长中误差≤2cm。
二、三、四等网相邻点最小边长不宜小于平均边长的1/2,最长边长不宜超过平均边长的2倍。
一、二级网最大边长可在平均边长的基础上放宽1倍。
各项限差规定 σ())((22bd a +=σ采用表1-1加乘常数) 同步环闭合差限差σω53x ≤, σω53y ≤, σω53z ≤, σω53≤ 同步环只计算三边同步环,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线相应改正数较差应满足下列要求(或者进行已知点检查,已知点点位变化相对于约束点的边长相对中误差不应低于表1-1规定的上一等级控制网中最弱边相对中误差)σ∆2dV X ≤,σ∆2dV Y ≤,σ∆2dV Z ≤))((22bd a +=σd 按照基线边长计算《工程测量规范》GB50026-2007控制网测量中误差m ≤σ⎥⎦⎤⎢⎣⎡=n WW N 31m ,N 为控制网中异步环的个数,n 为异步环边数,W 为异步环全长闭合差。
各项限差规定σ ())((22bd a +=σ采用表2-1加乘常数) 同步环闭合差限差σω5n x ≤, σω5n y ≤, σω5n z ≤, σω5n 3≤ n —同步环的边数,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,控制网的最弱边边长相对中误差,应满足表2-1中相应等级的规定。
GPS控制网平差总结报告

GPS控制网平差总结报告GPS控制网是指由一组GPS基准站组成的网络,用于测量和控制大范围区域内的GPS定位精度。
GPS控制网平差是对GPS观测数据进行处理和分析,得到每个GPS站点的坐标和高程的过程。
该报告对GPS控制网平差的基本原理、流程以及常用的算法进行了总结。
报告首先介绍了GPS控制网平差的基本原理。
GPS观测数据包括卫星观测值和接收机历元数据,可以通过基线解算得到不同站点之间的相对位置关系。
基于这些相对位置关系,可以通过平差方法计算出每个站点的绝对坐标和高程。
报告还列举了常用的GPS控制网平差算法。
最常用的算法包括最小二乘法、加权最小二乘法和区域平差法。
最小二乘法通过最小化观测值与模型预测值之间的残差来求解平差参数。
加权最小二乘法则考虑观测数据的权重,将不同类型的数据进行加权处理。
区域平差法则将整个控制网分成若干个区域,分别进行平差计算,再通过闭合差控制各个区域之间的一致性。
最后,报告总结了GPS控制网平差的应用和挑战。
GPS控制网平差在地理测量、地质灾害监测和测绘工程等领域具有重要应用价值。
然而,由于GPS观测数据本身存在误差和不确定性,平差算法和数据处理过程中需要考虑到这些因素,以提高平差结果的准确性和可靠性。
综上所述,GPS控制网平差是一种重要的测量和控制技术,可以用于获取大范围区域内的GPS定位精度。
通过了解GPS控制网平差的基本原理、流程和常用算法,可以更好地应用该技术解决实际问题。
然而,在实际应用中仍然需要不断改进算法和数据处理方法,以提高平差结果的精度和可靠性。
GPS D级静态网平差精度分析
GPS D级静态网平差精度分析摘要:随着卫星定位技术的不断成熟,也在多个行业得到普遍的应用。
对其精度分析研究也显得尤为重要,以给经济等方面带来更深远的意义,因此本文结合广西全州东山GPS D级控制网的应用实践,分析了GPS D级控制网相关精度的分析情况,以提供参考价值。
关键词:GPS;D级静态网;平差精度1 项目概况广西全州东山GPS D级控制网,由广西二一五地质队进行施工完成。
本次项目中本次利用GPS技术施测D级GPS网6点,充分利用原有的四等三角网中的点位,以广西测绘局施测的C级GPS控制点作为本网的起算数据,应用中国-DONGSHAN-111坐标系。
1.1坐标系统基本规定坐标系名称:中国-DONGSHAN-111椭球长半轴a:6378245.000000椭球扁率f:1/298.300000投影名称:高斯三度带投影尺度:1.000000 投影高:0.000000X加常数:0.000000 Y加常数:500000.000000平均纬度:000:00:00.000000N中央子午线:111:00:00.000000ED级点高程为二等水准,经过检验,精度达到四等水准精度的要求。
1.2 作业技术依据《全球定位系统(GPS)测量规范》(GB/T18314-2001);《全球定位系统城市测量技术规程》(CJJ 73—97);《测绘技术设计规定》(CH/T1004-2005);《国家三、四等水准测量规范》(GB 12898—91);2GPS控制网的布设和数据观测2.1GPS控制网的布设本D级GPS网控制的测区面积为50平方公里相对来说并不大,除矿区外,还有村镇不相接其它区域,整体上其形状非常不规则,交通不是很方便,属于边远高寒山区。
这决定了其网形需坚强、点位精度分布均匀及点位密度适当,平面精度为D级GPS,同时高程拟合精度要达到四等水准测量的精度要求。
在此基础上,D级GPS控制网的网状应设计为几何图形,且均为三角形,整体上表现为多边形。
GPS静态控制测量平差结果分析
据 一一计算 出来 , 结合 轨道参数 、 钟差 参数 , 完善监测站 的相关 数据 。而注入站则是将主控站所完成 的这些编织成相 应的导航 信 号系统 , 再经过主控站发送 出去 。最后传入到存储器 中。
1 . 1 - 3 G P s用户 设 备
应小于相应级 别规 定精度的 2 、 / 倍。 而其 中任一时段的结果与 各时段平均值之差不能超过相应级别的规定精度 。
段。
差、 电离层 延迟 、 对流程 延迟等) , 因而可 以获得很高精度 的相对 位置。G P S相对定位分为静态相对定位和动态相对定位 , 其 中静
l 静态 G P S测量概述
位置相对 固定 ,用多 台接收机在不 同的测站上进行相对 定位的
同步 观 测 , 测 量 时 间 由几 分钟 至 几 小 时 。通 过 大 量 的重 复 观 测 测
建材发展导 向2 0 1 3 年 5月
【 文章编号 】 1 6 7 2 — 1 6 7 5 ( 2 0 1 3 ) 0 9 — 0 1 9 9 — 0 2
地 质 勘 测
G P S静态控制测量平差结果分析
申 锐
( 云 南 省 地矿 测 绘 院 云 南 昆明 6 5 0 0 0 0 )
2 . 1 基线 质量检 核
1 . 1 静态 G P S组成
部 分 组成
在 基 线 质 量 检 核 前 应 该 先 明确 外 业 控 制 测 量 所 要 求 达 到 的 静态 G P S主要 由空间卫星星座 、地 面监控站及用户 设备三 等级 。 根据 范》 规 定各等级 网相邻点间基 线长度精度用 以下公 式表示 :
2 . 2 . 2 同 步环 闭合 差 检 核
《 规范》 中对同步闭合环 的要求 :
GPS静态测量实习报告1
1GPS控制网外业观测设计1.1项目概况➢任务来源在2016至2017学年的上学期,通过学习《卫星导航定位基础》这门课程,有了GPS观测的理论基础。
为了将理论与实践相结合,将课本上的知识运用到实际生活中解决问题,故利用2016年暑假的时间进行GPS测量实习。
通过实际操作学习并掌握平面控制测量、高程控制测量、GPS控制网的设计、外业观测与内业数据处理,使我们对控制测量实施全过程有一次亲身体验,从而提高每位我们的实际操作技能。
平面控制网、高程控制网、GPS三维控制网的设计、外业数据采集与内业数据处理全过程。
本阶段的任务是在沈阳市建设D级GPS控制网。
主要任务包括技术设计、选点、外业观测计划、外业观测、数据传输与格式转换、基线解算、网平差、成果质量控制、技术总结等。
➢测区概况测区在沈阳市市内。
经度:东经123度25分左右,纬度:北纬41度45分左右。
首先,测区内以平原为主,地势平坦,平均海拔50米左右。
山地丘陵集中在东北、东南部,属辽东丘陵的延伸部分,西部是辽河、浑河冲积平原,地势由东向西缓缓倾斜。
其次,测区内主要以建筑和道路为主,人员密集、经济发达,属于繁华地带。
1.2技术依据➢本次GPS控制网外业观测设计依据如下:①《全球定位系统(GPS)测量规范》民共和国国家标准,GB/T 18314-2009,2009.② CH 2001-92《全球定位系统(GPS)测量规范》③ CH 1002-95《测绘产品检查验收规定》④《GPS城市测量规范》⑤《东北大学GPS实习任务书-2015》1.3现有测绘资料与选点情况➢现有测绘资料:①徐绍铨等,GPS 测量原理与应用(第三版),武汉大学出版社,2008;②魏二虎等,GPS 测量操作与数据处理,武汉大学出版社,2003;③全球定位系统(GPS)测量规范,中华人民共和国国家标准,GB/T 18314-2009,2009.④百度地图上各个控制点附近的街景以与由东北大学到各个控制点的路线。
实验报告GPS静态测量
实验报告GPS静态测量试验四GPS静态测量一、试验目的试验的目的是使同学了解采纳GPS定位技术建立工程控制网的过程,使所学理论学问与实践相结合,巩固和加深对新学问的理解,增加同学的动手能力,培养同学解决问题、分析问题的能力。
通过学习,应达到如下要求:1、娴熟把握GPS接收机的使用办法,外业观测的记录要求。
选点、埋石的要求。
2、合理分配时段、把握星历预告对时段的要求。
PDOP值的大小对观测精度的影响,图形结构的设计及外业工作。
外业观测时手机或对讲机的合理应用。
3、把握GPS控制测量数据处理处理的流程,能自立完成基线解算及网平差二、试验地点:城市学院校区内,试验学时:4小时三、试验前的预备工作1、试验内容介绍:对试验的任务和意义作好充分了解。
2、使用的仪器及物品:GPS接收机(含电池)、基座、脚架若干台,作业调度表,外业观测手簿,小钢尺,铅笔,安装有传输软件和数据处理软件的计算机,数据传输线若干根,便携式存储器。
3、搜集资料①广泛收集测区及其附近已有的控制测量成绩和地形图资料a.控制测量资料包括成绩表、点之记、展点图、路线图、计算说明和技术总结等。
收集资料时要查明施测年月、作业单位、依据规范、坐标系统和高程基准、施测等级和成绩的精度评定。
b.收集的地形图资料包括测区范围内及周边地区各种比例尺地形图和专业用图,主要查明地图的比例尺、施测年月、作业单位、依据规范、坐标系统、高程系统和成图质量等。
c.假如收集到的控制资料的坐标系统、高程系统不全都,则应收集、收拾这些不同系统间的换算关系。
(注:本试验采纳地科系2022年5月建立的校内控制网资料)①收集有关GPS测量定位的技术要求通过参考测量规范,收集有关的测量技术要求。
GPS测量规范包括:a.《全球定位系统GPS测量规范》GB/T 18314-2022b.《工程测量规范》GB 50026-2022四、GPS控制网的布设1、GPS网图形设计原则①GPS网应按照测区实际需要和交通情况,作业时的卫星情况,预期达到的精度,成绩的牢靠性以及工作效率,根据优化设计原则举行。
GPS测量实习报告
GPS测量实习报告GPS测量实习报告11作业过程1.1GPS静态测量GPS静态测量首先要选点并布设网型,点要选在开阔、无遮挡物、无电磁波干扰、交通方便的地方,以保证对卫星的连续跟踪观测和卫星信号的质量,并且便于以后的观测作业和应用。
GPS 网的布设应尽量覆盖整个测区,不要过密或者过疏,GPS网三条边边长应相差不大,夹角应介于25度到135度之间。
在保证质量的前提下,GPS网设计应尽可能地提高效率、降低成本。
接下来就是进行外业观测,实习中我们采用同步观测相对定位的方法,三台接收机同步观测采集数据,观测时间为40分钟,按预先设定的GPS网依次推进。
安置仪器是应注意将仪器安置在测量点上,高度适中,踏实脚架再对中整平,量取天线高时量测点位表面到天线护圈中心的高度。
接收机正常工作后不能触动仪器,也不能在仪器旁使用对讲机和手机,避免无线电干扰卫星信号。
外业观测完成后将对采集到的数据进行内业处理,实习过程中我们采用HGO软件进行基线解算。
1.2三等水准测量三等水准测量我们沿GPS网点布设附合水准路线,测量时应注意安置水准仪的测站至前、后视立尺点的距离要量距使其相等,每站按规范读数并记录所需数据,随即进行各项计算,填写记录表进行各项检查,满足限差后才能搬站。
依次设站,用相同的方法进行观测,2直至线路终点,计算线路的高差闭合差。
测量工作完成后进行平差计算。
1.3RTK测量RTK测量时应将基准站接收机架设在开阔并且相对较高的地方,架设好电台和天线后连接电缆并开机,启动基准站后用手部与其连接,在手部中新建项目并配置坐标系,然后再回到主界面选择平滑,设置电文模式、差分模式和天线高。
再将手部与移动站连接,回到主界面设置数据,与连接基准站的数据一样。
设置完成后即可选择两个已知点进行基线解算,解算合格后就可以移动移动站进行测量。
测量完成后可将数据导出进行内业处理。
1.4土地利用现状调查土地利用现状调查需要预先准备调查范围的遥感影像,通过目视判读影像在图中选取分布均匀、遍布全区的特征点,利用RTK测量方法对选取的特征点进行测量,再根据测量的数据遥感影像的矫正,导出高分辨率图像。
GPS静态测量实习报告
GPS静态测量实习报告姓名:鄢敏专业:工程测量技术学号: **********实习内容: GPS静态测量实习实习时间: 2016.3.28-2016.4.4***师:***组别:工程测量1502班湖北国土资源职业学院2016年4月6号目录一实习目的二实习组织与安排三测区概况四选点以及网形的设计1 选点要求2 选点结果3 网形的选择五外业观测1计划调度表的编制及安排2 仪器设置3 架设仪器,统一开机4 填写GNSS外业观测记录表六数据传输七 HGO软件平差计算八实习成果九实习心得十附录一实习目的运用现已学到的GPS静态测量的操作流程,以及现学的知识,于我校布设一个四等的GPS静态控制网;再次学习及掌握静态控制网的设计,设备的操作流程,以及HGO软件数据的处理。
二实习的组织与安排实习地点:湖北国土资源职业学院汉南校区内实习仪器:海星达H32型接收机1台;海星达iRTK2型接收机3台;实习分组:因使用了四台仪器同时观测,所以将班上的同学分为了四组,由鄢敏,杜东革,邹柯,陈振兴四名同学分别带领一组进行操作,由鄢敏同学作为调度人来统一调配时间来实行观测。
三测区概况学校地理上位于武汉市西南部,大概地理坐标东经约为114°02',北纬30°19'-30°11',地势平坦,植被稀少,多为人工建筑物,其高程在海拔上约为26米,南通汉南区,北达汉洪高速公路,东临蚂蚁河,西接老宫湖。
测区属亚热带大陆性湿润季风气候,四季分明,平均温度16.5℃。
冬季气温(一月份)平均3.6-3.8℃,夏季气温(七月份)平均气温28.2-29.2℃,极端最高温度出现在1966年8月11日,为39.8℃。
极端最低温度出现在1977年元月30日,为零下17.4℃。
全区无霜期194-272天,初霜期常年在10月26日-11月27日,终霜期在翌年2月9日-4月14日。
全年日照时数1776.5小时。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FJ-3省道S229南坑至源头段二级公路改建工程GPS静态控制测量网平差报告萍乡公路勘察设计院二○一一年九月目录一、GPS控制点成果表 (1)二、GPS控制点网示意图 (1)三、GPS控制网平差报告……………………………………1~4一、G PS控制点成果表序号点号坐标(米) 高程(米)H备注X Y1 G1 3044783.262 483918.997 165.982 源并去南坑公路右侧钢筋砼、与D1通视(K33+655)左侧4米处。
一级GPS静态点2 G2 3045336.142 485138.500 262.207 源并去南坑公路右侧钢筋砼、与D4通视(K32+020)左侧15米处。
一级GPS静态点3 G3 3046850.282 487744.256 159.284 南坑镇七宝村新尤组水泥路中缝钢钉、与D13通视(K28+483)左侧10米处。
一级GPS静态点4 G4 3047703.462 490103.347 158.428 南坑镇大岭路中国移动营业厅、彭红远家5楼顶油漆刻石、与D16通视。
一级GPS静态点5 D1 3044576.685 483709.363 138.070 S314公路弯道边坡上钢筋砼、与D1通视(K33+760)左侧254米处。
RTK加密点6 D2 3044924.025 484045.621 178.946 源并去南坑公路右侧水泥路中缝钢钉与D3通视(K33+460)左侧6米处。
RTK加密点7 D3 3045175.043 484371.238 193.391 源并去南坑公路右侧水泥路中缝钢钉与D4通视(K32+919)左侧97米处。
RTK加密点8 D4 3045128.427 484796.609 215.246 白竺乡崇源村花石组卢富德家2楼顶油漆刻石、与G2通视(K32+423)127米处。
RTK加密点9 D5 3045557.232 485595.899 242.426 源并去南坑公路右侧钢筋砼、与D6通视(K31+524)左侧15米处。
RTK加密点10 D6 3045706.767 485689.906 229.085 源并去南坑公路右侧水泥路中缝钢钉、(K31+347)右侧12米处。
RTK加密点11 D7 3045959.676 485826.974 219.070 源并去南坑公路右侧水泥路中缝钢钉、与D8通视(K30+918)左侧7米处,RTK加密点12 D8 3046361.150 485699.228 218.872 南坑镇七宝村钟明彩家2楼顶油漆刻石。
RTK加密点13 D9 3046535.433 486098.102 178.404 源并去南坑公路左侧小水泥路中缝钢钉、与D10通视(K30+228)右侧31米处。
RTK加密点14 D10 3046605.821 486377.143 171.152 源并去南坑公路左侧水泥路中缝钢钉、(K29+942)右侧2米处。
RTK加密点15 D11 3046671.400 486879.754 162.008 源并去南坑公路右侧去高田村小水泥路中缝钢钉、与D12通视(K29+390)左侧25米处。
RTK加密点16 D12 3046878.636 487474.957 168.666 南坑镇七宝村李勇家3楼顶油漆刻石、(K28+760)右侧10米处。
RTK加密点17 D13 3046830.938 487935.537 152.122 南坑镇七宝村钟胜财家前水泥地钢钉、(K28+285)右侧18米处。
RTK加密点18 D14 3046984.136 488594.275 144.709 源并去南坑公路右侧距新尤候车厅12米水泥路中缝钢钉、(K27+590)左侧1米。
RTK加密点19 D15 3047294.058 488799.593 154.110 源并去南坑公路土路段(K27+220)右侧8米处钢筋砼、与D14通视。
RTK加密点20 D16 3047519.557 489577.551 131.234 源并去南坑公路土路段、钟璋公祠旁(K26+398)左侧5米处钢筋砼、与G4通视。
RTK加密点注:平面控制采用北京54坐标系,中央子午线113度50分,高程控制采用黄海高程二、GPS控制点网示意图三、GPS控制网平差报告1 坐标系统1.1 坐标系统名称Beijing541.2 基准参数椭球长半轴 a 6378245.0000椭球扁率 f 1/298.300000001.3 投影参数M0 =1.00000000 投影比率H = 0.0000 投影高Bm =0投影面的平均纬度B0 =0:00:00.00N 原点纬度L0 =113:50:00.00E 中央子午线N0 =0.0000 北向加常数E0 =500000.0000 东向加常数回到顶部2 三维无约束平差2.1 平差参数2.2 基线向量及改正数2.3 τ(Tau)检验表2.4 τ(Tau)检验直方图2.5 自由网平差坐标站点纬度/中误差经度/中误差高程/中误差中误差(度:分:秒) (m) (度:分:秒) (m) (m) (m)G1 27:30:56.51731N 0.0003 113:50:18.15494E 0.0003 171.6313 0.0008 0.0009 G2 27:31:14.47513N 0.0003 113:51:02.59320E 0.0002 267.8566 0.0006 0.0007 G3 27:32:03.64399N 0.0003 113:52:37.56370E 0.0003 164.9342 0.0007 0.0008 G4 27:32:31.32668N 0.0003 113:54:03.55410E 0.0004 164.0783 0.0008 0.0009 GD1 27:32:54.94678N 0.0003 113:50:23.98394E 0.0002 246.3755 0.0006 0.0007 回到顶部3 二维约束平差3.1 平差参数迭代次数 2参考因子 1.0056x(north)平移-42.3973 my(east)平移 -16579.2544 m比例0.0000ppm旋转0.0000 s3.2 平面距离平差值起点止点北向(x)/中误差东向(y)/中误差平距中误差相对误差(m) (m) (m) (m)G1 G2 552.8800 0.0005 1219.5033 0.0004 1338.9790 0.0006 1: 2274831 G3 2067.0194 0.0005 3825.2587 0.0004 4348.0080 0.0006 1: 7073607G4 2920.1993 0.0005 6184.3499 0.0005 6839.1335 0.0007 1: 9813403GD1 3645.4590 0.0005 159.7774 0.0003 3648.9588 0.0006 1: 6183736G2 G3 1514.1394 0.0004 2605.7554 0.0004 3013.7318 0.0006 1: 5327464 G4 2367.3192 0.0005 4964.8466 0.0005 5500.3547 0.0007 1: 8334781GD1 3092.5790 0.0004 -1059.7259 0.0003 3269.1075 0.0005 1: 6553558G3 G4 853.1798 0.0005 2359.0911 0.0005 2508.6305 0.0007 1: 3807022 GD1 1578.4396 0.0004 -3665.4813 0.0004 3990.8927 0.0006 1: 6710503G4 GD1 725.2597 0.0005 -6024.5724 0.0005 6068.0701 0.0007 1: 90445093.3 平面坐标站点北向(x)/中误差(m)东向(y)/中误差(m)中误差(m)误差椭圆E(m) F(m) ET(度:分:秒) G1 3044783.2623 0.0005 483918.9971 0.0003 0.0006 0.0005 0.0003 161:07:32 G2 3045336.1423 0.0004 485138.5004 0.0003 0.0005 0.0004 0.0003 173:38:31 G3 3046850.2817 0.0004 487744.2558 0.0004 0.0006 0.0004 0.0004 13:49:21 G4 3047703.4616 0.0005 490103.3469 0.0005 0.0007 0.0005 0.0004 36:08:03 GD1 3048428.7213 ***** 484078.7745 *****回到顶部4 高程拟合4.1 平差参数迭代次数 1参考点GD1拟合方程 H = H0 + AA -5.650934.2 高程拟合坐标站点高程(m) 高程(m)G1 165.9816 0.0008G2 262.2068 0.0006G3 159.2838 0.0007G4 158.4276 0.0008GD1 240.7246回到顶部5 基线闭合差Baseline Type rms dx dy dz distance-------------------------------------------------------------------------------------------G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529G2->G3.242A 99.9 0.0062 -2063.4456 -1777.5444 1294.6074 3015.5398-------------------------------------------------------------------------------------------同步环( 3 baselines) 相对误差= 0.76ppm EX = 0.0043 EY = -0.0043 EZ = -0.0026 8706.0493Baseline Type rms dx dy dz distance-------------------------------------------------------------------------------------------G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566G2->G4.242B 99.9 0.0072 -4060.9524 -3093.9755 2049.7944 5501.4248-------------------------------------------------------------------------------------------同步环( 3 baselines) 相对误差= 0.48ppm EX = -0.0041 EY = 0.0051 EZ = 0.0010 13683.0814Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->GD1.242X 99.9 0.0065 1554.7134 -896.8104 2732.5118 3269.2543 -------------------------------------------------------------------------------------------同步环( 3 baselines) 相对误差= 0.80ppm EX = -0.0048 EY = 0.0042 EZ = 0.0017 8261.4927Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->G4.242B 99.9 0.0063 -1997.5067 -1316.4322 755.1870 2508.6519 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 -------------------------------------------------------------------------------------------同步环( 3 baselines) 相对误差= 0.12ppm EX = -0.0003 EY = 0.0004 EZ = 0.0015 13695.9047Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->GD1.242X 99.9 0.0071 3618.1569 880.7382 1437.9069 3991.7835 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 -------------------------------------------------------------------------------------------同步环( 3 baselines) 相对误差= 0.42ppm EX = 0.0026 EY = -0.0040 EZ = -0.0015 11989.6182Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G4->GD1.242X 99.9 0.0073 5615.6650 2197.1667 682.7190 6068.7182 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 -------------------------------------------------------------------------------------------同步环( 3 baselines) 相对误差= 0.16ppm EX = 0.0015 EY = -0.0007 EZ = -0.0022 16557.6999。