基于DSP的超声波电机转速测量与频率跟踪算法设计
基于DSP的直流电机调速、测速系统设计

c r e o o s d o h u r ntm t r ba e n t e DSP
W ANG i n Hu gne n , ig a U i ri , iig8 0 1 , hn ) S ho o Mehncl n ier g Q nh i nv sy X nn 10 6 C ia i e t
转控制 、 电机 调速 、 电机 测速 和 串 口电脑 显示 四个 功能 。
l 硬 件 系 统 介 绍
硬 件 系统直接 使用 D P教学 板上 的 A D转 换 电位器 , S / 用输 入 电压 的 A D转 换 结果 直 接控 制 P / WM 的输 出脉宽 , 利用 L 9 2 8驱动 器驱 动电机 运转 实现 调速 。测速用 固定 在 电机 主轴上 的光码 盘 和光耦 电路
Th l crc lcr u ti i l r la l n r ci a . e ee tia ic i ssmp e, eib e a d p a tc 1
Ke r y wo ds: P; r c u r n tr v lc t d lto v lc t a u i g DS die tc re tmoo ; e o i mo u ain; eo i me s rn y y
第2 9卷 第 6期 21 0 1年 1 2月
青 海 大 学 学 报 (自 然 科 学 版 ) Jun l f i h i nvr t( a r Sine o ra o Qn a U ie i N t e c c ) g sy u e
V0 . 9 No 6 12 . De . 01 c2 1
Absr c To r a ie te c n r lf n t n o e o i d lto n a u i fdie tc re tno t a t: e l h o to u ci fv lc t mo u ain a d me s rng o r c u r n — z o y tr t e p af r o o ,h l t m fTMS 2 F2 7A d lDS wa s d t v lp a2 o 3 0L 40 mo e P s u e o de e o 4V o to y tm a e n c n r ls se b s d o d gtlPW M rn i l . e s se c n b o n ce o a c mp t rwih smp e s ra o ts fwa e iia p cp e Th y t m a e c n e td t o u e t i l e ilp r ot r . i
基于DSP的直流电机调速、测速系统设计

基于DSP的直流电机调速、测速系统设计王惠平【摘要】To realize the control function of velocity modulation and measuring of direct current motor,the platform of TMS320LF2407A model DSP was used to develop a 24V control system based on digital PWM principle.The system can be connected to a computer with simple serial port software.The electrical circuit is simple,reliable and practical.%为了精确实现直流电机调速、测速等控制功能,文中利用TMS320LF2407A型号的DSP实验平台,以数字PWM对直流电机调速为控制原理,构建了一个24V直流电机控制系统,且可通过一个简单的串口软件实现电脑输入调节,通过设计本系统较精确的实现了电机调速、测速和串口通信显示等功能,该设计方案电路简单、可靠性强,具有较高的应用价值。
【期刊名称】《青海大学学报(自然科学版)》【年(卷),期】2011(029)006【总页数】5页(P28-32)【关键词】DSP;直流电机;调速;测速【作者】王惠平【作者单位】青海大学机械工程学院,青海西宁810016【正文语种】中文【中图分类】TM33在社会生产高速发展的今天,直流电机作为执行机构被广泛地应用于各类控制系统中,其驱动与转速精度是电机能够稳定工作的关键。
而在电机的精密控制中,测速单元是很重要的一个环节,测速单元的分辨率越高反应越快,对电机的控制就越好[1-2]。
如何能够使电机调速和测速更加精确和系统化,是需要探讨的一个知识领域。
在现有的电机驱动芯片中,DSP芯片由于其功耗低,指令的执行周期短等优点,成为了实验室中进行电机调速、测速实验的首选平台[3]。
一种基于DSP的伺服电动机转速检测方法

一
种 基 于 DS P的伺 服 电动 机 转 速 检 测 方 法
汪 涛 ,黄 声 华 ,万 山明
( 中科 技 大学 , 华 湖北 武汉 4 0 7) 3 0 4
摘
要 :为 了 精 确 检 测 交 流 伺 服 系 统 的 速 度 控 制 特 性 . 文 介 绍 了针 对 增 量 式 光 电编 码 器 的 常 用 数 字 测 速 方 法 以 该
i lme tn a h o h a d r n o t r . i p p r a s n l s s a d s l e h mp e ii n u d r t e mp e n ig p t f t e h r wa e a d s fwa e Th s a e lo a a y e n o v s t e i r c so n e h e f C fl w p e . i t o d u lu e o h e o r e o P a d i r v d t e d t c i n a c r c i c n fe to o s e d Th s me h d ma e f l s ft e r s u c fDS n mp o e h e e t c u a y, a o t ral n a c h e f r n eo e v . e ly e h n e t e p ro ma c fs r o
统硬 件 。
本 文针对 实 际伺 服 系统介 绍 了一种 基于 长春第 一 光
学 有 限公 司 的 Z KD一 1 2系 列混 合 式 光 电编 码 器 以 及 T 公 司 最 新 推 出 的 电 机 专 用 控 制 器 I
fn t n o S3 0 2 1 o eo iyd tcin.n h n a ay e t o fM / b sd o P. ic se h u ci fTM 2 F 8 2f rv lct ee t o o a d t e n l s sa me h o T ae n DS ds u s st e d
基于DSP2812的三种电机转速测量方法研究
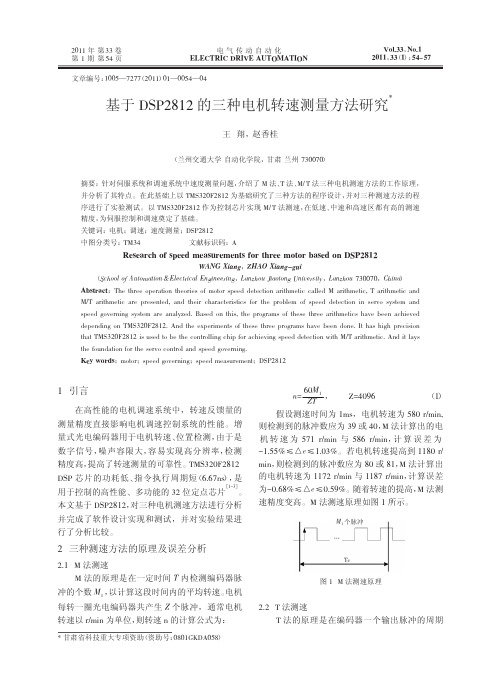
转速(转/秒)
1500 1400 1300 1200 1100 1000
900 800 700 600 500 400 300 200 100
0 0
12000 24000 36000 48000 60000 72000 84000 96000 108000 120000 时间(毫秒)
Abstract:The three operation theories of motor speed detection arithmetic called M arithmetic, T arithmetic and
M/T arithmetic are presented, and their characteristics for the problem of speed detection in servo system and
579.7 r/min,则计算误差为-0.05%≤△e≤0.02%。
若电机转速提高到 1180 r/min,则检测到的脉冲数
应为 931 或 932,T 法计算出的电机转速为 1180.1
r/min 与 1178.8 r/min,计算误差为-0.1%≤△e≤
0.01%。随着转速的提高,T 法测速精度变高低。T
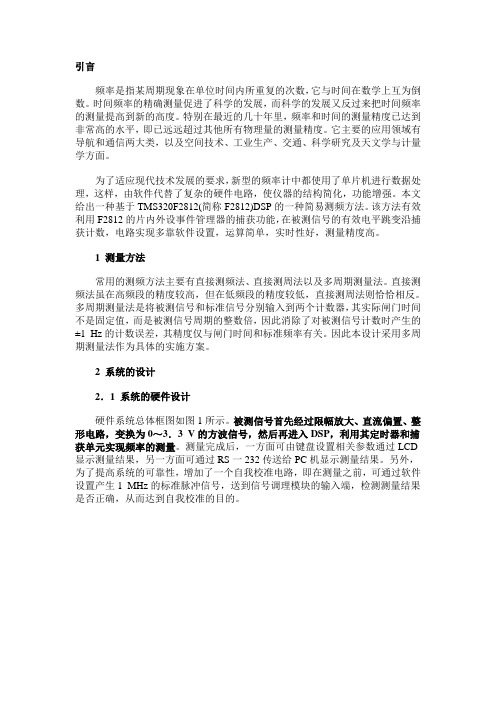
法测速原理如图 2 所示。
M2 个脉冲
Tc 图 2 T 法测速原理
M1 个脉冲
M2 个脉冲
Tc
T2
图 3 M/T 法测速原理
min 与 1179.994 r/min,计算误差为△e≈0%。随着 转速的提高,M/ T 法测速一直都有比较高的精度。 M/ T 法测速原理如图 3 所示。
3 三种测速方法的 DSP 实现
基于DSP的超声波电机控制系统

第 19 卷第 8 期
金
龙等
基于 DSP 的超声波电机控制系统
95
3.3
振荡器电路 该电路使用的振荡器是 LTC1799,它非常适用
V (k ) ≅ V (k ) ≅ X t (k ) − t (k − 1)
( 2) ( 3)
国家自然科学基金( 50277006 )和江苏省“青蓝”工程基金( 1999 ) 资 助 项 目 , 江 苏 省 教 育 厅 高 新 技 术 产 业 化 基 金 ( JH01-007 )和教 育部优秀青年教师基金( 2002 — 40 )资助计划项目。 收稿日期 2004 - 01 - 30 改稿日期 2004 - 04 - 07
正反转调速。 ( 4 )具有调压功能。改变两相驱动激励幅值 的大小,也可以改变超声波电机的速度。 ( 5 )可接光电编码器输出信号以便于实现闭 环数字控制。 ( 6 )具有计算机接口,便于将采集的数据传 输到计算机进行处理。 2.2 控制系统的结构框图 本文根据控制系统的要求,设计了控制器的结 构框图,如图1示。
超声波电机是一种新型的电机,其控制和驱动方法有别于传统的电磁电机。本文主要
介绍了课题组所研制的一种基于 DSP 的超声波电机的控制系统, 对系统的硬件及软件的实现技术 做了分析。测试结果表明控制系统的性能稳定,控制方法可行。 关键词: 超声波电机 中图分类号: TM35 DSP CPLD 振荡器
A DSP-based Control System For Ultrasonic Motors
VD3
式( 1)中 N 由 LTC1799 中 DIV Pin 的接线模式决 定:接高电平为 100,浮空为 10,接地为 1; R SET 为外接设置电阻的阻值; f 输出 为频率的输出值。 3.4 变频驱动电路 变频驱动电路的主要作用是将直流驱动电压 逆变为高频交流电压输出,从而实现超声波电机的 功率驱动。常用的逆变器有两相桥式半控逆变器、 两相桥式全控逆变器、双推挽式逆变器和无变压器 直接升压式逆变器。本系统运用的是两相桥式半控 驱动电路,它的主要优点是效率高,变压器的利用 率高,抗不平衡能力强。缺点是逆变器主回路的桥 臂电压只是直流电源电压的一半,因此所需直流电 源的电压较高,其电路如图 2 所示。
基于DSP频率计的设计
引言频率是指某周期现象在单位时间内所重复的次数,它与时间在数学上互为倒数。
时间频率的精确测量促进了科学的发展,而科学的发展又反过来把时间频率的测量提高到新的高度。
特别在最近的几十年里,频率和时间的测量精度已达到非常高的水平,即已远远超过其他所有物理量的测量精度。
它主要的应用领域有导航和通信两大类,以及空间技术、工业生产、交通、科学研究及天文学与计量学方面。
为了适应现代技术发展的要求,新型的频率计中都使用了单片机进行数据处理,这样,由软件代替了复杂的硬件电路,使仪器的结构简化,功能增强。
本文给出一种基于TMS320F2812(简称F2812)DSP的一种简易测频方法。
该方法有效利用F2812的片内外设事件管理器的捕获功能,在被测信号的有效电平跳变沿捕获计数,电路实现多靠软件设置,运算简单,实时性好,测量精度高。
1 测量方法常用的测频方法主要有直接测频法、直接测周法以及多周期测量法。
直接测频法虽在高频段的精度较高,但在低频段的精度较低,直接测周法则恰恰相反。
多周期测量法是将被测信号和标准信号分别输入到两个计数器,其实际闸门时间不是固定值,而是被测信号周期的整数倍,因此消除了对被测信号计数时产生的±1 Hz的计数误差,其精度仅与闸门时间和标准频率有关。
因此本设计采用多周期测量法作为具体的实施方案。
2 系统的设计2.1 系统的硬件设计硬件系统总体框图如图1所示。
被测信号首先经过限幅放大、直流偏置、整形电路,变换为0~3.3 V的方波信号,然后再进入DSP,利用其定时器和捕获单元实现频率的测量。
测量完成后,一方面可由键盘设置相关参数通过LCD 显示测量结果,另一方面可通过RS一232传送给PC机显示测量结果。
另外,为了提高系统的可靠性,增加了一个自我校准电路,即在测量之前,可通过软件设置产生1 MHz的标准脉冲信号,送到信号调理模块的输入端,检测测量结果是否正确,从而达到自我校准的目的。
本设计选用美国德州仪器公司(TI)的F2812 DSP作为核心处理单元。
基于DSP的大功率超声电源的研制
基于DSP的大功率超声电源的研制Design of high power ultrasonic power supply based on DSP(江苏科技大学) 赵磊王建华刘建芸Zhao Lei , Wang Jianhua,Liu Jianyun 摘要:介绍了一种基于DSP的大功率超声电源的原理、总体结构和软硬件设计及其特点。
该电源由高频逆变电路和以高性能DSP芯片TMS320F2812为核心的控制系统组成。
高频逆变电路实现了频率和功率均可调的超声频交流电的输出。
控制系统完成了电参数的实时采集,并执行频率自动跟踪和振幅恒定的控制任务。
软件上,分别使用了可变步长策略和PID算法,以满足上述两个闭环控制的需要。
实验表明,该电源能够很好地驱动超声振动负载,并具有频率跟踪范围宽和负载适应能力强的特点。
关键词:超声电源;频率跟踪;恒幅输出;DSP中图分类号:TN409 文献标识码:BABSTRACT:The principles, design method and characteristics of high power ultrasonic power supply based on DSP are presented in the paper. This device consists of inverter major circuit and control system based on TMS320F2812. The main circuit produces power supersonic AC output with adjustable frequency and changeable power. Control system is responsible for the real -time electrical data acquisition,and it also performs the control of frequency auto-tracking and constant output specific power.In software,variable step strategy and PID are applied to meet the need of above two closed-loop controls. Tests show that this power supply can effectively drive ultrasonic load,and it has a wide range of frequency tracking and high load flexibility.Key words:Ultrasonic Power Supply;frequency tracking;constant output specific power;DSP1、引言近些年,随着机械振动、电力电子技术的飞速发展,功率超声的应用愈来愈广泛,对功率超声电源的研制也提出了越来越高的要求。
一种基于DSP的超声波电机速度控制系统

2 2 0 年 第 1期 《 机 技 术 》 8・0 8 电
维普资讯
磅 ^
_ 二 l双推 挽拓扑电 路 l
I l
1 } ’ }
●一
现代驱动与控嗣
UM H s S PB, U
— 入 . /
量初始化 时, 向各变量所在的存储单元写入初始
大转矩 、 无电磁干扰 、 动作响应快 、 运行无噪声、
无输入自锁, 体积小等。 因此 , 在工业控制 、 汽车 工业、 精密仪器 、 航空航天 、 办公 自 动化 , 智能机 器人等领域有着广阔的应 用前景, 近年来倍受科
技 界和工 业 界的关 注 , 渐成 为 国内外 的研
一
种基于DS 的超声波 电机速度控制系统 P
陈 欢 史 敬 灼
河 南科 技 大 学 ( 7 0 3) 4 10
A DSP b s d Sp e n r lS s e f r Ul r s ni o o - a e e d Co t o y t m o t a o c M t r
h r wa ea ds fwa ewa x li d Se o d y t e co e ・ a d r n o t r se p ane . c n l , h l s d l o o to o t eu ta o i t rwa a re n b I o p c n r l h l s n c mo o s c ri d o y a P t r c n r lsr t g . i a l,t e f a i i t ft i c n r ls s o to tae y F n l h e sb l y o s o to y ・ y i h t m e n ta e y e p rme t . e i d mo sr t db x e i n s s Ke wo d : ta o i t r P M S e d c n r l y r s Ul s n c mo o W r p e o to
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于DSP 的超声波电机转速测量与频率跟踪算法设计尤向阳1,2(1.三门峡职业技术学院;2.河南科技大学应用工程学院,河南三门峡472000)摘要:基于DSP56F801说明了超声波电机驱动控制系统PWM 信号产生方法。
在此基础上设计了电机测速的算法和频率自动跟踪的算法并通过软件实现在线测速和实时频率跟踪。
该自动测速和频率跟踪算法实现简单,计算量小,运行效率高。
在此基础上,下一步可结合各种控制策略对超声波电机进行闭环控制研究,实现对超声波电机运行的高效实时控制。
关键词:超声波电机;测速;频率跟踪;算法中图分类号:TP311文献标志码:A文章编号:1673-2928(2019)02-0013-05收稿日期:2018-10-30作者简介:尤向阳(1980-),男,河南洛阳人,三门峡职业技术学院副教授,硕士,主要研究方向为电气自动化技术。
DOI:10.19329/ki.1673-2928.2019.02.0042019年3月第18卷第2期(总第98期)安阳工学院学报Journal of Anyang Institute of TechnologyMar,2019Vol.18No.2(Gen.No.98)专用集成PWM 芯片虽然能够用于超声波电机的控制,但其无法满足实时性能要求高的位置控制和需要在线辨识参数的精确调速控制场合[1]。
DSP 芯片因其实时、高速、低功耗和高集成度的特点,被广泛应用在电机控制领域。
由于超声波电机通常工作在谐振频率附近,以DSP56F801作为核心控制器的超声波电机驱动控制装置产生的PWM 信号满足了超声波电机谐振频率,此PWM 信号经过双推挽驱动电路可驱动超声波电机[2]。
实现超声波电机闭环控制时,转速的实时检测与谐振频率的在线跟踪是必须首先解决的两个重要问题。
本文说明了基于DSP56F801产生PWM 信号的方法,并在此基础上对电机测速的算法和频率自动跟踪的算法进行设计,通过软件实现在线测速和实时频率跟踪。
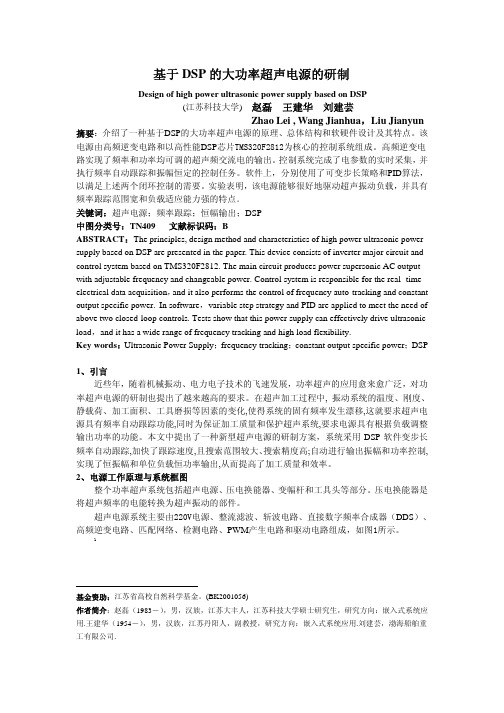
1PWM 信号的产生超声波电机驱动控制系统采用双推挽逆变电路,根据超声波电机的驱动电压波形需求和推挽逆变电路的工作特点,要求DSP 能够产生频率、相位差、占空比均可调的PWM 信号,通过实时正确配置DSP56F801的PWM 模块中各寄存器的值可产生所需PWM 信号[3]。
PWM 模块有6个输出通道,从PWM0-PWM5,超声波电机驱动用到PWM0-PWM3,将其配置为两对互补通道对;将PWM4、PWM5屏蔽,即通道占空比为0%。
PWM0-PWM3信号如图1所示。
为了保证推挽式逆变电路正常工作,需要对PWM 模块的死区宽度寄存器和标志位进行设置,图1PWM 模块输出信号保证生成一组自带死区的互补PWM 信号。
根据设定的死区时间DT 以及PWM 波的周期可以计算PWM 信号的占空比。
死区时间DT 按公式(1)进行设置。
DT =(P ×PMDEADTM -1)×(IPBus 时钟周期)(1)式中,P 为PWM 模块的预分频值。
PMDEAD⁃TM 为PWM 模块的死区控制字。
IPBus 时钟频率为40MHz 。
设P =2,PMDEADTM =200,同时取PWM 周期的50%等于PMDEADTM 的值,则输出频率为50KHz 的PWM 信号,才能满足实验用USM 的谐振频率要求。
模块中各寄存器正确赋值后,将PW⁃MEN 位置1,使PWM 发生器工作,并在每半周期重载中断程序中载入不同的值,实现频率、占空比、安阳工学院学报2019年相位差的实时调整,实现超声波电机的速度控图2PWM 信号软件流程图在主程序中完成对PWM 模块寄存器的初始化;并赋初值给Period 、Deadtime 、Intercount 、Phavalue 。
PWM 信号的频率:F =(IPBUS 时钟频率)/(P ×2×Period )(2)其中IPBUS 时钟频率为40MHz ;P 为预分频值,这里P =2;Period 表示计数模寄存器PWMCM 中的值。
PWM 信号的占空比:Duty =(Period -Deadtime )/(2×Period )(3)其中Deadtime 表示死区控制寄存器PMDEAD⁃TM 中的值。
超声波电机两相输入交流电压间的相位差主要由PWM0和PWM2之间的相位差来决定,可由下式(4)求得.θ=90°-(Phavalue /Period )×180°(4)当重载中断发生时,根据Intercount 的值,将不同的值载入,计数值寄存器PWMVAL2,Intercount 的值为1时将Phavalue 中的值送入计数值寄存器PWMVAL2;当Intercount 为0时,将(Period -Phaval⁃ue )中的值送入计数值寄存器PWMVAL2。
2超声波电机转速测量本文中转速测量是用DSP 中内置外围模块中的TIMER 定时器在一定的时间内对光电编码器输出的脉冲进行计数,然后进行数据运算得出转速数据。
DSP56F801内设两个定时器,每个定时器内部包括4个16位的计数器/定时器;每个计数器有单独的分频器,并且它们可以级联使用;每个计数器都有捕捉和比较功能。
定时器控制寄存器(TM⁃RCTRL )中的13~15位可设置计数器的工作模式,将此3位设置为100时,计数器工作在相位检测模式,即可对编码器输出的A 、B 相脉冲进行4倍频,并可判断旋转方向。
其计数和方向判断原理图如图3所示。
状态和控制寄存器(SCR )中的Capture Mode 可用来设置输入沿的捕捉模式。
定时器D 的计数器有自己固定的3个I/O 引脚,将码盘信号直接连接到这3个引脚TD0-TD2。
图3定时器相位检测模式工作原理常用的能兼顾高低转速的数字测速方法为M/T 法[4]。
M/T 法测速既记录测速时间内码盘输出的脉冲数M 1,又检测同一时间间隔内高频时钟脉冲数M 2,是一种综合性能最佳的测速方法。
M/T 法测速原理如图4所示,它利用光电编码器输出的脉冲上升沿启动采样周期定时器工作,同时启动高频脉冲计数器。
当采样周期定时结束时,重新捕捉光电编码器上升沿,当捕捉到上升沿时停止高频脉冲计数器。
其定时器的同步和捕获功能保证了测速的精度。
采用M/T 法测得电机转速可表示为式(5)。
n =60M 1P N (T c +ΔT )=60M 1f 04P N M 2(5)式中f 0表示高频时钟脉冲频率,P N 表示码盘光14第二期栅数。
采用M/T 法测速的相对误差与转速无关,表达式如式(6)所示。
Δn /n <60M 1f 04P N M 2-60M 1f 04P N (M 2+1)60M 1f 04P N M 2×100%=1M 2+1(6)图4M/T 法测速原理采用M/T 法实现电机测速的程序流程图如图5所示。
3超声波电机的频率跟踪为使电机获得较高的工作效率,其输入两相电压的频率应位于电机的固有谐振频率附近,否则驱动电流将与正压电效应产生的反馈电流发生向量叠加,进而削弱电机驱动能力[5]。
而超声波电机随着运行时间的加长,由于温升、负载变化及周围环境变化等原因将导致电机的谐振频率发生漂移。
因此,驱动系统中加入频率检测电路来检测电机谐振频率的漂移,并以此调整电机的驱动频率,能实现频率跟踪,保证系统稳定运行。
由超声波电机开环实验结果可知,在电机谐振频率附近的区域内,检测信号的电压值峰值比较高,在30V 以上;其他区域电压值都较低,在25V 以下。
在谐振频率附近,电机输入端电压峰值减小,反馈电压峰值增大。
通过测试出反馈回来的电压可以实现电机的频率跟踪。
图5电机速度测试程序流程图本文的频率跟踪功能利用A/D 模块与PWM 模块联合实现。
DSP56F801的ADC 包括8个输入通道和两个独立的采样保持电路,转换精度为12位,转换的最大值是32760。
ADC 的时钟是从总线时钟获得,它和总线时钟的关系是可编程的;转换速度最快为每次同时扫描需要5.3us ;有同时和顺序两种采样模式;模数转换器有2个独立的转换器,8个输入通道分为两组:AN0~AN3,AN4~AN7,每组都有各自独立的一个采样保持电路,可保持本组内一路信号。
VREF 参考电压源经电感滤波接到3.3V 直流电源。
采用电压反馈式频率跟踪方法,通过反馈回来的电压实现电机的频率跟踪。
通过对孤极反馈电压进行采样,获得反馈电压的峰值与设定值进行比较,当采样得到的值小于设定值时,通过改变PWM 计数模寄存器(PWMCM )中的值改变PWM 信号的频率,从而实现电机谐振频率的自动跟踪。
图6为PWM 信号波形与孤机反馈电压波形,电机工作在谐振状态时,反馈电压的最大值出现在PWM 信号为高电平期间。
尤向阳:基于DSP 的超声波电机转速测量与频率跟踪算法设计15图6PWM信号波形与孤机反馈电压波形程序实现时,在PWM模块重载中断发生且PWM1信号在中断结束后输出将为高电平,在此时的PWM重载中断程序中触发ADC模块,对反馈电压进行采样。
设置AD模块寄存器时,允许扫描结束中断;使ADC模块工作在最大时钟频率5MHZ,且只允许sample0-sample2,都对AN0进行采样,采样连续进行4个周期,获得12个采样值。
当扫描结束时,扫描结束中断标志位置1,向CPU申请中断,经裁决后,进入中断服务程序,在程序中取12个采样值中的最大值作为反馈电压的最大值与参考值进行比较,若小于参考值,使PWM计数模寄存器(PWMCM)加1,使频率减小一个频率单位;若大于参考值,则维持PWMCM中的值不变,保持原驱动频率不变。
频率跟踪的程序流程图如图7所示。
在主程序中定义全局变量Adsam、Sample[3]、Feedback、refervalue;其中Adsam代表扫描中断次数;Sample[3]表示3次采样值;Feedback表示12次采样得到的最大值;refervalue表示设定的参考值(谐振时反馈电压的最大值)。
图7谐振频率自动跟踪程序流程图4小结基于DSP56F801说明了超声波电机驱动控制系统PWM信号产生方法。
在此基础上设计了电机测速的算法和频率自动跟踪的算法并通过软件实现在线测速和实时频率跟踪。
该自动测速和频率跟踪算法实现简单,计算量小,运行效率高。
在此基础上,下一步可结合各种控制策略对超声波电机进行闭环控制研究,来实现对超声波电机运行的高效实时控制。
参考文献:[1]潘鹏.行波型超声波电机驱动和精密伺服特性的研究[D].南京:东南大学,2017.[2]史敬灼,尤向阳.超声波电机转速特性仿真与神经网络建模实验研究[J].微电机,2009,42(9):18-21.[3]胡敏强,金龙,顾菊平.超声波电机原理与应用[M].北京:科学出版社,2005.(下转第60页)器人从原点出发沿着位势降低的方向最终到达目标点。