基于DSP的直流无刷电机控制技术研究
基于DSP的无刷直流电动机控制方法研究
The Re e r h o s a c fBLDCM ie Drv r Con r le s d n DSP t o lr Ba e o
Q U W i bn , U H n I e — i O og—x n ig a ( . T ru o ,Ld , h nzo 10 1 C ia 2 i guU i r t,h ni g 1 0 3 C ia 1 K K G o pC . t. C a gh u2 3 1 , hn ;.J n s nv sy Z ej n 2 1 , hn ) a ei a 2
w sc o e i h c Ic nr l rw sa o t d i h p e n h u r n o p T o v h rb e h tBL M a a h s n, w i h a P o t l a d p e n t e s e d a d t e c re t o . o s l e te p o l m t a DC h d n oe l hg oq e r pe a d b d p r r n e i o p e te u u lc mmuai n me h d t a ali tr p e u r ui e h n h tr u i l n a ef ma c n l w s e d. s a o p o h tt t o t l n e r td s b o t sw e o h c u n te r i g a d fl n d e f h h e al f c e s r q i p d o h trwa b n o e a d a n w me h d t a h i n n al g e g so e t re h l —ef t n o se up e n t e mo o sa a d n d, n e t o h t s i t e s
基于DSP的直流无刷电机控制

基于DSP的直流无刷电机控制【摘要】本文介绍了基于DSP的直流无刷电机控制技术。
在对无刷直流电机和DSP在电机控制中的应用进行了概述。
接着,详细讨论了基于DSP的直流无刷电机控制原理,DSP控制系统的设计与实现,DSP控制算法的优势,DSP控制系统的性能评估以及实验结果与分析。
总结了基于DSP的直流无刷电机控制的优势,并展望了未来的研究方向。
通过本文的研究,可以更好地了解DSP在直流无刷电机控制中的应用,为相关领域的工程师和研究人员提供有益的参考和启发。
【关键词】关键词:直流无刷电机控制、DSP、控制原理、控制系统设计、控制算法、性能评估、实验结果、优势、研究展望。
1. 引言1.1 无刷直流电机概述直流电机是一种常见的电动机类型,可以根据其励磁方式分为直流有刷电机和直流无刷电机。
无刷直流电机是一种不需要用碳刷来换向的电机,因此有较低的摩擦损耗和较长的使用寿命。
相比于有刷直流电机,无刷直流电机具有更高的效率和更稳定的性能。
无刷直流电机的控制需要通过控制器来实现,其中数字信号处理器(DSP)在电机控制中发挥着重要作用。
无刷直流电机具有高效、稳定的特性,而DSP在无刷直流电机控制中的应用使得电机的控制更加灵活和精确。
通过研究和应用基于DSP的直流无刷电机控制技术,可以进一步提高电机系统的性能和效率。
1.2 DSP在电机控制中的应用在无刷直流电机控制中,DSP可以实现闭环控制、速度控制、位置控制等功能。
通过精确的信号处理和数据计算,DSP可以实时监测电机的运行状态,并根据需要调整电机的转速和转矩,实现电机的精准控制。
DSP还可以实现智能控制算法,提高电机的能效和响应速度,使电机系统更加稳定可靠。
DSP在无刷直流电机控制中的应用,可以提高电机系统的性能和稳定性,减小系统的体积和功耗,同时简化系统的设计和开发流程。
随着DSP技术的不断成熟和发展,预计在未来的研究中将会有更多的创新和应用。
2. 正文2.1 基于DSP的直流无刷电机控制原理直流无刷电机是一种电磁旋转式电机,不同于传统的有刷直流电机,无需使用碳刷和电刷,因此具有体积小、效率高、寿命长等优点。
基于DSP的直流无刷电机控制

基于DSP的直流无刷电机控制随着科技的不断发展和进步,直流无刷电机在工业控制中的应用越来越广泛。
而直流无刷电机的控制技术也日益成熟,其中基于数字信号处理器(DSP)的控制技术更是备受关注。
本文将从直流无刷电机的工作原理和特点、DSP的基本原理及其在直流无刷电机控制中的应用等方面展开介绍,希望能够为相关领域的研究和应用提供一些参考。
一、直流无刷电机的工作原理和特点直流无刷电机是一种将电能转换为机械能的设备,它通过电磁感应原理实现动力传递。
与传统的直流有刷电机相比,直流无刷电机具有结构简单、寿命长、噪音小、效率高等特点,因此在工业生产中得到了广泛的应用。
直流无刷电机的工作原理是通过控制电机内部的电流来实现转子的定位和控制。
通常情况下,控制直流无刷电机需要知道电机的转子位置和速度,这需要使用一些传感器来获取相关信息。
而在控制方面,通常采用的是PWM控制技术,控制电机的速度和方向。
二、DSP的基本原理及其在直流无刷电机控制中的应用DSP(Digital Signal Processor,数字信号处理器)是一种专门用于数字信号处理的微处理器,它能够对数字信号进行高速处理,广泛应用于通信、音频、视频、医疗等领域。
在直流无刷电机控制中,DSP也有着广泛的应用。
DSP在直流无刷电机控制中的主要应用之一是用于控制电机的PWM信号生成。
通过DSP 可以实现精确的PWM信号生成,从而控制电机的速度和方向。
DSP还可以实时地获取电机的转子位置和速度信息,因此可以实现闭环控制,提高电机的控制精度和效率。
DSP还可以用于实现各种复杂的控制算法,例如磁场定位控制、矢量控制等。
这些控制算法可以提高电机的动态响应性能和稳定性,使电机在不同工况下都能够保持良好的控制效果。
基于DSP的直流无刷电机控制系统通常包括DSP模块、功率放大器模块、电机驱动器模块、传感器模块等几个部分。
DSP模块负责控制算法的实现、PWM信号的生成和输出,功率放大器模块负责放大DSP输出的PWM信号,电机驱动器模块负责将放大后的PWM信号传送给电机,传感器模块负责采集电机的转子位置和速度信息。
基于DSP的直流无刷电机控制
基于DSP的直流无刷电机控制直流无刷电机(Brushless DC Motor,简称BLDC)是一种采用无刷技术的电动机,它具有高效率、低噪音、长寿命等优点,在许多领域得到了广泛的应用,比如工业生产、汽车制造、航空航天等。
为了实现对BLDC电机的精确控制,需要采用先进的数字信号处理技术,其中基于数字信号处理器(Digital Signal Processor,简称DSP)的电机控制方案成为了一种常见的选择。
本文将介绍基于DSP的直流无刷电机控制技术。
一、直流无刷电机的特点直流无刷电机与传统的有刷直流电机相比,具有多种优点。
由于无需使用碳刷,因此无刷电机摩擦损失小,寿命长,维护成本低。
无刷电机采用电子换向技术,具有更高的效率和运行平稳性。
由于无刷电机采用了电子换向和闭环控制技术,因此可以实现更加精准的速度和位置控制。
二、基于DSP的无刷电机控制系统基于DSP的无刷电机控制系统通常包括三个主要部分:电机驱动器、信号采集与处理模块、以及控制算法模块。
1. 电机驱动器电机驱动器是指用于控制无刷电机的电子器件,其主要功能是根据控制信号来确定电机的转子位置,并提供相应的驱动信号。
常见的电机驱动器包括三相全桥功率放大器、三相半桥功率放大器等。
在基于DSP的控制系统中,电机驱动器通常由DSP芯片控制,以保证对电机的高效、精准控制。
2. 信号采集与处理模块信号采集与处理模块用于获取电机运行过程中的相关信号,比如电流、电压、速度、位置等参数。
这些信号通常需要进行采样、滤波和数学处理等操作,以便后续的控制算法使用。
在基于DSP的控制系统中,通常采用模拟/数字转换器(ADC)来实现信号的采集与处理。
3. 控制算法模块控制算法模块是整个系统的核心部分,其主要功能是实现对电机的速度和位置控制。
常见的控制算法包括PID控制、模型预测控制(MPC)、磁场定向控制(FOC)等。
在基于DSP的控制系统中,控制算法通常在DSP芯片上实现,以保证对电机的高效、精准控制。
基于DSP的直流无刷电机控制
基于DSP的直流无刷电机控制DSP技术(数字信号处理)已经在很多领域得到了广泛的应用,其中之一便是直流无刷电机的控制。
直流无刷电机的控制技术在工业自动化、机器人、电动汽车等领域都有重要的应用价值。
本文将重点介绍基于DSP的直流无刷电机控制技术。
1. 直流无刷电机基本原理直流无刷电机是利用电磁场力以及交流驱动电流来实现转子的旋转运动。
它由定子和转子两部分组成,定子和转子之间的转矩通过对控制电流的调节来实现。
传统的控制方法是利用PWM(脉冲宽度调制)来控制电流,从而控制电机的转速和转矩。
而基于DSP的直流无刷电机控制技术可以更精准地控制电流,进而实现更高效的电机控制。
DSP技术在直流无刷电机控制中的应用主要包括以下几个方面:(1)电流控制:DSP可以通过精确的采样和控制算法,实现对电机电流的精准调节。
可以根据电机的负载情况和所需转矩,动态调整控制电流,以实现更高效的功率输出和更稳定的运行。
(3)位置控制:基于DSP的直流无刷电机控制技术还可以实现对电机位置的闭环控制。
通过接入位置传感器或者利用编码器来实时监测电机的位置,并结合控制算法来实现更加精准的位置控制。
(4)故障检测和保护:DSP可以实现对电机运行过程中的异常情况的监测和检测,并及时采取措施来保护电机和系统的安全。
可以实现对过载、过流、过温等异常情况的检测和保护。
(1)DSP选择:需要选择性能稳定、控制精度高的DSP芯片,常用的有TI的TMS320系列,ADI的ADSP系列等。
(2)传感器选型:需要根据电机的控制需求,选择合适的位置传感器或者编码器,用于实时采集电机的位置、速度等参数。
(3)控制算法设计:需要设计合适的控制算法,包括电流控制、速度控制、位置控制等。
控制算法的设计需要兼顾性能、稳定性和实时性。
(4)系统架构设计:需要设计合理的系统架构,包括DSP和外围设备(传感器、电机驱动器、电源等)的连接和通信方式。
(5)软件开发:需要根据控制需求,开发相应的控制软件,包括控制算法、通信协议、故障处理等。
基于DSP技术的直流无刷电机控制系统的研究的开题报告
基于DSP技术的直流无刷电机控制系统的研究的开题报告一、题目基于DSP技术的直流无刷电机控制系统的研究二、研究背景和意义直流无刷电机因其具有高效、节能、可靠等优点,被广泛应用于家用电器、汽车等领域中。
然而,直流无刷电机控制系统对其性能和使用寿命有极大的影响。
因此,研究基于DSP技术的直流无刷电机控制系统,对于提高直流无刷电机的控制精度、降低噪声和振动水平等方面有重要的意义。
三、研究内容和方法本研究将采用DSP技术,设计基于DSP的直流无刷电机控制系统,实现对直流无刷电机的控制。
具体内容包括:1.了解直流无刷电机的基本原理和控制方法;2.分析直流无刷电机的控制方式,确定控制算法;3.选定DSP芯片,进行系统设计及编程;4.搭建直流无刷电机控制系统实验平台,对系统进行试验验证;5.分析试验结果,对系统进行评估和改进。
四、预期成果本研究的预期成果包括:1.设计出基于DSP技术的直流无刷电机控制系统,实现对直流无刷电机的控制;2.通过实验验证系统的控制精度和稳定性;3.提高直流无刷电机的控制精度,降低噪声和振动水平。
五、研究计划本研究计划分为以下几个阶段:1.研究直流无刷电机控制原理和方法,制定研究计划;2.选定DSP芯片,进行系统设计及编程;3.软、硬件结合,搭建直流无刷电机控制系统实验平台;4.进行试验,对系统进行测试、优化和改进;5.撰写论文,完成毕业设计。
六、参考文献1. 张财珠. 基于DSP的无刷直流电机控制系统[M]. 中国矿业大学, 2011.2. 刘璋. 基于单片机的直流无刷电机控制及其应用[D]. 湖南大学, 2006.3. 陈淑珍. 直流无刷电机控制策略的研究[J]. 计算机技术与发展, 2013(11): 156-157.4. 蔡学详. 社区电动车无刷直流电机控制[J]. 信息产业发展, 2009(22): 41-42.。
基于DSP的直流无刷电机控制

基于DSP的直流无刷电机控制直流无刷电机(BLDC)是一种通过电子方式实现转子初级磁场定向的电机。
相较于传统的有刷电机,BLDC具有高效率、高转矩密度、长寿命和低噪音的优势,因此被广泛应用于工业、交通、家电等领域。
基于数字信号处理器(DSP)的BLDC电机控制系统是一种高性能、高精度的控制方法。
其主要包括三个功能模块:速度闭环、电流闭环和定时器。
速度闭环是为了控制电机转速。
通过测量电机转子位置和速度来实现闭环控制,在每个控制周期内,DSP通过比较实际转速和设定转速来计算控制误差,并通过调整PWM(脉宽调制)信号的占空比来实现转速的闭环控制。
电流闭环是为了控制电机的功率输出。
在BLDC电机控制系统中,电机的相电流与相对应的电机转矩成正比关系。
通过测量和控制电机的相电流,可以实现闭环控制电机的输出功率。
通过调整PWM信号的占空比和频率来控制电机的相电流,并确保其达到设定的值。
定时器是控制整个控制流程的重要组成部分。
在BLDC电机控制系统中,定时器用来驱动PWM信号的生成和产生控制周期。
DSP通过定时器的计时信号来触发速度闭环和电流闭环的计算和控制。
基于DSP的BLDC电机控制系统还可以通过PID控制算法来实现更精确的速度和电流控制。
PID控制算法将实际值与设定值进行比较,并根据误差值来调整控制量,从而实现更快速、更准确的闭环控制。
基于DSP的BLDC电机控制系统是一种高效、高精度的控制方法。
通过速度闭环、电流闭环和定时器等功能模块的协调工作,可以实现对BLDC电机的精确控制,同时还可以利用PID控制算法等实现更精确的闭环控制。
这种控制方法适用于各种需要高精度、高效率的直流无刷电机应用中。
基于DSP的无刷直流电机控制方法

算法精度
改进算法,提高控制精度,减小 电机运行过程中的误差,提升电 机性能。
鲁棒性增强
增强控制算法的鲁棒性,减小外 部干扰对电机性能的影响,提高 系统的稳定性。
硬件设计优化
电路板布局优化
合理布置电路板上的元器 件,减小信号传输延时和 干扰,提高信号质量。
电源管理优化
优化电源电路设计,提高 电源稳定性和效率,降低 电源噪声对控制系统的影 响。
基于DSP的无刷直流电机控 制方法
汇报人: 2024-01-01
目录
• 引言 • 无刷直流电机原理 • DSP技术基础 • 基于DSP的无刷直流电机控制
方法 • 优化与改进 • 结论与展望
01
引言
研究背景与意义
研究背景
随着工业自动化和智能化的快速发展,无刷直流电机(BLDCM)因其高效、节能、高可靠性等优点 ,在许多领域得到了广泛应用。为了实现无刷直流电机的精确控制,需要研究先进的控制策略和方法 。
直流电机的控制中。
研究趋势
随着人工智能和机器学习技术的不断发展,基于深度学习、强化学习等机器学习算法的 无刷直流电机控制方法成为新的研究趋势。这些方法能够实现对电机的自适应、自主学 习控制,进一步提高电机的性能和智能化水平。同时,随着电力电子技术和传感器技术
的不断发展,无刷直流电机的控制精度和响应速度也将得到进一步提高。
定性。
无刷直流电机应用领域
01
02
03
工业自动化
无刷直流电机广泛应用于 各种自动化生产线、机器 人、数控机床等领域。
电动车
无刷直流电机在电动车领 域具有广泛的应用,如电 动自行车、电动摩托车、 电动汽车等。
家用电器
无刷直流电机也应用于家 用电器中,如空调、冰箱 、洗衣机等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4 结束语由PMAC 和嵌入式计算机构成的机器人控制系统,经过近一年的研制和调试,实现了远程控制机器人对于输电线路维护与检修的基本功能要求,该系统的成功研制得到了审查专家的认可,并且还在进一步地完善中。
参考文献:[1] 吴功平,等.输电导线机械破损的红外检测与故障诊断[J ].仪器仪表学报,1999,2(6):571-574.[2] 戴锦春,等.高压输电线破损的红外故障诊断系统[J ].武汉水电大学学报,1998,31(2):61-64.[3] 蔡自兴.机器人学[M ].北京:清华大学出版社,2000[4] 李小坚,谭 民.自动化理论、技术与应用先进机器人与集成系统技术[M ].北京:西苑出版社,1999.[5] 郭丙华.移动机器人计算机控制[J ].计算机测量与控制,2003,11(10):749-750,766.[6] PmacPC hardware preference [Z ].Delta Tau DataSystem ,Inc.2003.[7] 葛伟亮,等.电磁控制元件[M ].北京:北京理工大学出版社,2001.[8] 单成祥.传感器的理论与设计基础及其应用[M ].北京:北京国防工业出版社,1999.作者简介:李 伟 (1963-),男,湖南汨罗人,湖北工业大学机械工程学院高级工程师,主要从事测试技术、故障诊断研究。
基于DSP 的直流无刷电机控制技术研究吴雪梅,景占荣,史永奇(西北工业大学,陕西西安710072)Study of Cont rol Technology for Brushless DC Electromotor Based on DSPWU X uemei ,JING Zh an rong ,SHI Yongqi(Northwestern Polytechnical University ,Xi ’an 710072,China ) 摘要:围绕无位置传感器直流无刷电机控制中的2个关键技术———位置检测和起动进行了研究,提出了将瞬时状态检测和预测估计相结合的电机转子位置检测方法和“三段式”起动,并应用于以TMS320L F2402A 为核心的控制系统中,给出了试验结果,证明了该位置检测方法的正确性和有效性。
关键词:无位置传感器;直流无刷电机;位置检测;起动中图分类号:TM921.54文献标识码:A文章编号:10012257(2005)03005003收稿日期:20041231Abstract :This paper mainly st udied two pivot 2al techniques of brushless DC elect romotor wit hout po sition sensorpo sition detection and start.We p resented a new rotor po sition detection met h 2od which was instantaneous state detection com 2bined wit h state p redict and “t hree sect ”startmet hod.The designed system was based on DSP TMS320L F2402A ,and provided some experimen 2ted result s.The result s showed t he correct ness and effectiveness of t he met hod.K ey w ords :sensorless ;brushless DC elect ro 2motor ;po sition detection ;start0 引言无刷直流电机以其高效率、结构紧凑、易维护和调速性能好等一系列优点得到越来越广泛的应用,但传统的无刷直流电机需要位置传感器来实现电机的换相,如霍尔器件(H ED )、光学编码器和旋转变压器等,这些传感器有的分辨率低或运行特性不好,有的对环境条件很敏感,潮湿和温度变化都会使性能下降,使得整个传动系统的可靠性难以得到保证。
因此,无位置传感器控制成为一个重要研究课题,针对无位置传感器直流无刷电机控制中的一些关键问题,重点研讨位置检测和起动技术。
・05・《机械与电子》2005(3)1 转子位置检测目前,对于无位置传感器直流无刷电机位置的测量,有端电压法、电流法和状态观测法等[1],但用得较多的还是反电动势法。
这种方法是通过检测反电动势的过零点来判断转子磁极的位置,从而确定逆变器中功率器件的切换时间。
虽然该方法简单、实用,但由于反电动势叠加有逆变器输出的脉宽调制波形和功率器件开关过程产生的尖峰干扰,使如何滤除混于反电动势中强干扰脉冲的问题变成了检测反电动势过零点的难点。
有很多滤除干扰的方法,但是往往使反电动势产生相移,而且这种相移因运行频率的不同而差异很大,很难通过补偿的方法校正。
由于反电动势过零点测不准,必然影响功率器件开关时间的准确度,从而影响电机的运行效率。
一种新的检测方法是将瞬时状态检测和预测估计[2]相结合,在提取反电动势时不需要滤波器,避免了相移的产生,利用大功率器件开关噪声熄灭的瞬间,对三相驱动模块的状态进行检测,从而判断转子过零点的到达时间,并利用状态预测的方法进行校正,推算三相功率器件的导通时间,这种位置检测方法精度高、抗干扰能力强,并且容易实现。
1.1 瞬时状态检测法原理采用反电动势波形为梯形的电机,采用两两导通,三相六状态的导通方式,在1个周期内(360°电角度)三相电机的6个电势过零点将转子位置分为6个区间。
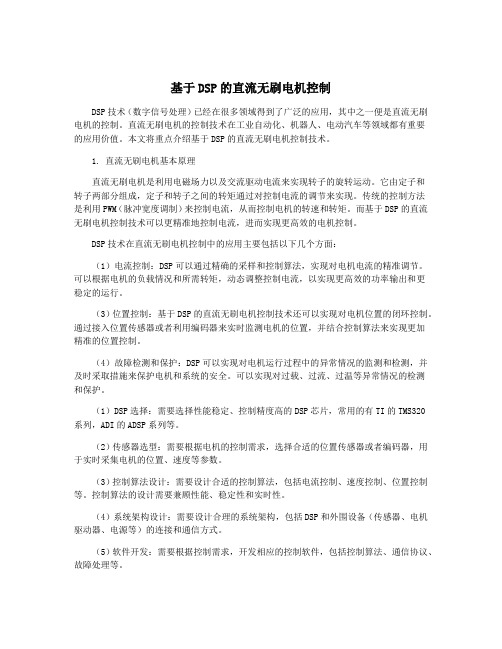
对各种驱动波形进行比较后,发现60°PWM工作方式能够更好地检测到反电势过零点,在此采用这种工作方式,具体的电机控制时序如图1所示。
检测到反电势过零点后,过30°电角度进行导通模式的切换。
由于电机电抗的存在,即使某相已经截止,其仍会通过上桥或下桥的续流二极管续流,在电流持续的时间内是无法测出感应电动势的。
为了避免错误的反电势检测,将反电势检测起始点设在导通模式切换后的15°电角度处,避开导通模式切换后的续流时间。
反电势过零点的检测仅在不导通相进行,在规定的模式时刻检测,并不是连续检测,只在PWM ON期间进行,且延迟一段时间避开功率管开关干扰。
为了进一步提高检测的可靠性,可在PWM ON期间多次采样,当连续N次检测到反电势过零点,则认为正确检测到了反电势的过零点。
当检测到的过零点距离上次过零点的时间图1 无刷电机控制时序图已大于120°电角度时,认为此次检测失败,利用过零点预测估计值进行插值,维持电机正常运转。
1.2 反电势过零预测估计原理电机的运行方向确定后,其运行方式有:匀速、匀加速和匀减速。
从而可用二阶微分方程描述电机的运行规律,利用预测估计理论建立如下运动方程。
状态方程γk=γk-1+Tγk-1+T22¨γk-1(1)观测方程Z k=γk+n k(2)估计方程γk=Z k(3)变化速率^γk-1=Z k-Z k-1T+T2^γk-1(4)加速度^γk-1=1TZ k-Z k-1T-Z k-1-Z k-2T(5)预测方程^γ(k+1)/k=^γk+T^γk-1+T22^γk-1(6)式中 γk第k次过零时间γk-1,¨γk-1过零时间的速率和加速度 Z k通过反电势检测到的第k次过零时间・15・《机械与电子》2005(3) ^γk 通过Z k 对γk 的估计值 ^γk -1,^γk -1 γk -1,¨γk -1的估计值 ^γ(k +1)/k 利用第k 次的^γk 对第k +1次的预测值在忽略了n k 的情况下,可以认为^γk =z k 。
利用式(3),式(4),式(5)和式(6),可得:^γ(k +1)/k =3z k -3z k -1+z k -2(7)运用上式对电机位置进行预测估计。
将瞬时状态检测与预测估计相结合对反电势过零点进行检测,一旦瞬时状态检测法检测不到过零点,可以通过预测估计来获得,从而解决了位置检测失效后功率管切换问题。
即使顺利检测到过零点信号,也可以利用预测估计值对其进行校正。
这种检测方法能够更加有效地检测到反电势过零点。
2 电机起动问题由于无刷直流电机在静止及低速运行时难以正确检测到反电势,因此必须解决电机起动的2个问题:一是静止启动的问题;二是同步切换的问题。
以往存在有多种起动方法[3],但有的要增加外围电路,有的则与电机特性联系密切,系统将采用三段式[4]方法,即利用纯软件实现起动,它将电机的起动过程分为预定位、加速与同步切换3个阶段。
在电机静止时,转子的初始位置是未知的,首先给设定的两相电枢绕组通以短暂的电流,使转子磁极稳定在这两相绕组的合成磁场的轴线上,实现预定位,以此作为转子磁极初始位置,然后按定、转子磁极间正确的空间相位关系使相应的功率管导通,并以固定的时间进行模式切换,此时不进行过零检测,随着电机转速逐渐升高,反电势也逐渐增大,升高到一定值时,通过端电压检测能够确定转子的位置,启动过零检测模块,当连续N 次正确检测到过零点,就可从外同步运行阶段切换到自同步运行阶段运行。
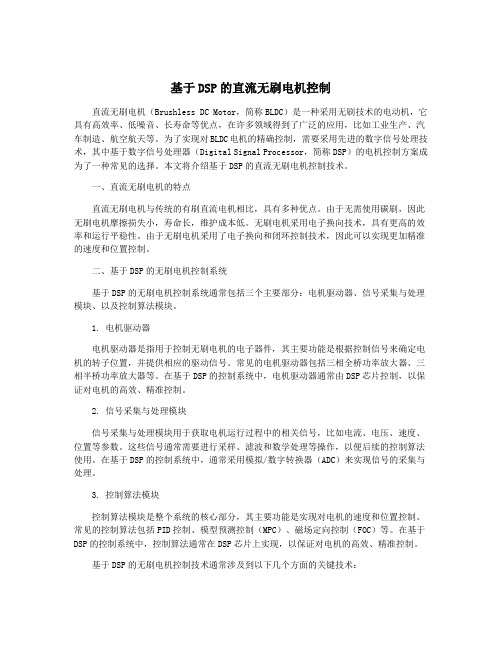
3 基于DSP 控制的系统结构无位置传感器无刷直流电机调速系统的结构框图[5-6],如图2所示。
系统的供电部分主要分2个支路,由220V 滤波整流后,1路为电机功率模块供电,另1路经变压器降压后为控制板上的芯片供电。
由控制显示面板发送电机起、停命令及转速等参数,系统上电后如果没有重新设置,则直接从E 2PROM图2 系统结构框图中读取上一次存入的参数。
利用2402A 中的I/O(数字输入/输出模块)、EV (事件管理器模块),完成电机的位置检测和转速控制[7]。
对端电流采样送至ADC (模数转换模块),采用速度、电流双闭环控制,从而实现电机的驱动和精确调速[8]。
4 结束语对上述控制系统进行试验的结果表明该位置检测方法能够更加有效地检测到过零点,使切换时间更准确,从而提高了电机的效率,使电机能够更加平稳、准确的运行。
同时采用三段式的起动能实现电机的成功拖动。
因此,该位置检测和起动方法是非常实用和有效的。
参考文献:[1] 董富红.永磁无位置传感器估计方法综述[J ].微电机,2003,(5):39-46..[2] Nobuyukikasa.A mechanical sensorless control systemfor salient pole brushless DC motor with auto calibra 2tion of estimated position angles[J \〗.IEEE Trans.on 2Ind.Electron ,2000,47(2):3-4.[3] 王冉冉.无位置传感器无刷直流电机启动的比较与研究[J ].微电机,2003,(1):29-30.[4] 沈建新.无位置传感器无刷直流电机三段式启动深入分析[J ].微特电机,1998,(5):8-10.[5] 刘和平.TMS320L F240x DSP C 语言开发应用[M ].北京:北京航空航天大学出版社,2003.[6] 韩安太.DSP 控制器原理及其在运动控制系统中的应用[M ].北京:清华大学出版社,2003.[7] Texas Instruments.TMS320L F/L C240xA DSP con 2trollers reference guide[Z].2001.[8] 陈伯时.电气传动系统的智能控制[J ].电气传动,1997,(1):3-8.作者简介:吴雪梅 (1980-),女,安徽金寨人,西北工业大学电子信息学院硕士研究生,研究方向为数字信号处理及其应用。