§8—4平面四杆机构的设计.ppt10
合集下载
机械原理8连杆机构设计
要求连杆在两个位置 垂直地面且相差180˚
给 定 的 设 计 条 件 : 1)几何条件(给定连架杆或连杆的位置) 2)运动条件(给定K) 3)动力条件(给定γmin) 设计方法:图解法、解析法、实验法
3. 用解析法设计四杆机构 思路:首先建立包含机构的各尺度参数和运动变量在 内的解析关系式,然后根据已知的运动变量求解所需 的机构尺度参数。
特例:等腰梯形机构-汽车转向机构
C’ B’
B
C
作者:潘存云教授
A
D
CC 电机
作者:潘存云教授
D
蜗轮 BBBA AA
蜗蜗杆杆
风扇座
D
A
作者:潘存云教授
EE
C
B
2.平面四杆机构的演化型式 (1) 改变构件的形状和运动尺寸
作者:潘存云教授
曲柄摇杆机构
曲柄滑块机构
↓∞ 偏心曲柄滑块机构
s =l sin φ
若∠B1C1D≤90°,则 γ1=∠B1C1D ∠B2C2D=arccos[b2+c2-(d+a)2]/2bc
若∠B2C2D>90°, 则 γ2=180°-∠B2C2D
γmin=[∠B1C1D, 180°-∠B2C2D]min
注:机构的传动角一般在运 动链最终一个从动件上度量。
B2 A
C2γ2 bγ1 c C1
(1)曲柄摇杆机构 共有三种基本型式:
特征:曲柄+摇杆
作用:将曲柄的整周回转转变为摇杆的往复摆动。 如雷达天线。
CC作者:潘存云教授 2 33
作者:潘存云教授
3
B1 4 D
A
雷达天线俯仰机构 曲柄主动
(2)双曲柄机构 特征:两个曲柄
3
2
给 定 的 设 计 条 件 : 1)几何条件(给定连架杆或连杆的位置) 2)运动条件(给定K) 3)动力条件(给定γmin) 设计方法:图解法、解析法、实验法
3. 用解析法设计四杆机构 思路:首先建立包含机构的各尺度参数和运动变量在 内的解析关系式,然后根据已知的运动变量求解所需 的机构尺度参数。
特例:等腰梯形机构-汽车转向机构
C’ B’
B
C
作者:潘存云教授
A
D
CC 电机
作者:潘存云教授
D
蜗轮 BBBA AA
蜗蜗杆杆
风扇座
D
A
作者:潘存云教授
EE
C
B
2.平面四杆机构的演化型式 (1) 改变构件的形状和运动尺寸
作者:潘存云教授
曲柄摇杆机构
曲柄滑块机构
↓∞ 偏心曲柄滑块机构
s =l sin φ
若∠B1C1D≤90°,则 γ1=∠B1C1D ∠B2C2D=arccos[b2+c2-(d+a)2]/2bc
若∠B2C2D>90°, 则 γ2=180°-∠B2C2D
γmin=[∠B1C1D, 180°-∠B2C2D]min
注:机构的传动角一般在运 动链最终一个从动件上度量。
B2 A
C2γ2 bγ1 c C1
(1)曲柄摇杆机构 共有三种基本型式:
特征:曲柄+摇杆
作用:将曲柄的整周回转转变为摇杆的往复摆动。 如雷达天线。
CC作者:潘存云教授 2 33
作者:潘存云教授
3
B1 4 D
A
雷达天线俯仰机构 曲柄主动
(2)双曲柄机构 特征:两个曲柄
3
2
四杆机构设计

答案
二、填空题
1、平面连杆机构就是构件用______连接而成得机构, 当平面四杆机构得运动副都就是______ ,则称为铰链 四杆机构。 2、铰链四杆机构得三种基本形式就是____、 ____ 与___ 。它们就是按照______来确定得。 3、铰链四杆机构中,固定不动得杆称为_ ___ ,不与 机架直接连接得杆称为____ ,用转动副与机架连接得 杆称为_____。 4、机构处于死点位置时,其传动角等于__,压力角等于
件相对位置固定不变, 相当于一个刚体,其形 状不会随着参考坐标系 不同而改变。
第 1 步:选B点,以 I 位置为参考位置,DF1 为机架 第 2 步:用刚化反转法求出 B2、B3 的转位点 第 3 步:做中垂线,找C1 点 第 4 步:联接AB1C1D
教学基本要求
1、了解组成铰链四杆机构得各构件得名称,熟悉铰 链四杆机构得等基本概念。
多数机构运动中的传动角是变化的。为了使机构 传动质量良好,一般规定机构的最小传动角 min 40 。 为了检查机构的最小传动角,需要确定最小传动角的 位置。通过分析可知:曲柄摇杆机构的最小传动角出 现在曲柄与机架共线的两位置之一;曲柄滑块机构的 最小传动角出现在曲柄与导路垂直的位置;导杆机构 在任何位置最小传动角都等于90o。
B1
A
B2
D
有无穷多组解。
A’
D’
b)给定连杆上铰链BC得三组位置
C1 C2 C3
有唯一解。
B1
设计:潘存云
B2
B3 D
A
刚化反转法
以CD杆为机架时瞧到得四杆机构ABCD得位置相当 于把以AD为机架时观察到得ABCD得位置刚化,以D轴
为中心转过 1 得2 到得。
▪ 低副可逆性; ▪ 机构在某一瞬时,各构
二、填空题
1、平面连杆机构就是构件用______连接而成得机构, 当平面四杆机构得运动副都就是______ ,则称为铰链 四杆机构。 2、铰链四杆机构得三种基本形式就是____、 ____ 与___ 。它们就是按照______来确定得。 3、铰链四杆机构中,固定不动得杆称为_ ___ ,不与 机架直接连接得杆称为____ ,用转动副与机架连接得 杆称为_____。 4、机构处于死点位置时,其传动角等于__,压力角等于
件相对位置固定不变, 相当于一个刚体,其形 状不会随着参考坐标系 不同而改变。
第 1 步:选B点,以 I 位置为参考位置,DF1 为机架 第 2 步:用刚化反转法求出 B2、B3 的转位点 第 3 步:做中垂线,找C1 点 第 4 步:联接AB1C1D
教学基本要求
1、了解组成铰链四杆机构得各构件得名称,熟悉铰 链四杆机构得等基本概念。
多数机构运动中的传动角是变化的。为了使机构 传动质量良好,一般规定机构的最小传动角 min 40 。 为了检查机构的最小传动角,需要确定最小传动角的 位置。通过分析可知:曲柄摇杆机构的最小传动角出 现在曲柄与机架共线的两位置之一;曲柄滑块机构的 最小传动角出现在曲柄与导路垂直的位置;导杆机构 在任何位置最小传动角都等于90o。
B1
A
B2
D
有无穷多组解。
A’
D’
b)给定连杆上铰链BC得三组位置
C1 C2 C3
有唯一解。
B1
设计:潘存云
B2
B3 D
A
刚化反转法
以CD杆为机架时瞧到得四杆机构ABCD得位置相当 于把以AD为机架时观察到得ABCD得位置刚化,以D轴
为中心转过 1 得2 到得。
▪ 低副可逆性; ▪ 机构在某一瞬时,各构
第八章-平面连杆机构及其设计

许用值:[α] = 500(一般)、400(高速重载);or [γ] = 400 、500 设计时: αman ≤ [α] or γmin ≥ [γ]
对于铰链四杆机构, γmin 为两极限位置时的 γ 角之一,要比较得出。 γ 与 各杆尺寸有关。
五、机构的死点位置 设曲柄摇杆机构的摇杆为主动件, 在图示两个位置有:
1.已知连杆几个给定位置设计机构
已知:B1C1、B2C2、B3C3 三位置 求:A、D 和 B、C
A、D 固定铰 B、C活动铰
C
Bb
a
c
A
d
D
解:① 选定B、C点
---据结构等附加条件
B1
② 作B1B2 、 B2 B3 垂直 平分线
C1B2C2 Nhomakorabea③ 垂直 平分线交点
即为 A 铰
B3
④ 同理可得 D 铰
P Pt:∥Vc---有效推力
Pt = Pcosα Pn = Psinα
B
1
φ
A
2 4
Pn
P
C
γ
α
Vc
Pt
3
D
α ----着力点的推力方向与其速度方向的夹角,称为 压力角。∵ α↑, Pn↑
γ ----传动角, 压力角的余角。 γ ↑, Pt↑,传力效果越好。 为保证一定的传力特性,设计机构时, α 不能太大, γ 不能太小。
曲柄存在条件:
1)机架和连架杆中必有一个为最短杆; 2)最短杆 + 最长杆≤ 其它两杆之和。
b
B
可知满足杆长条件时: 连架杆为最短杆,则得曲柄摇杆机构 机架为最短杆,则得双曲柄机构
a
φ
d
A
连杆为最短杆,则得双摇杆机构(存在周转副)
常用机构(四连杆机构)

械
设 转动导杆机构:
计 基
BC>AB
础 导杆可作360º回转
摆动导杆机构:
BC<AB 导杆在小于360º范围内摆动。
(牛头刨床的主传动机构)
平
面
4
连 杆 机 构
3 C
3 C
33 3 C
C3 C3
242 2 22 242
3C C3
C3
4224 B
4224
3C
4 2 21 22 2 4
C3 4
4
3 C
A CC
——双摇杆机构
最新课件
11
二、铰链四杆机构的演化
机
械
设
计 基
机构演化方法
础
平 改变杆件长度,用移动副取代回转副
面 连 杆
扩大回转副 变更机架等
机
构
连杆
2 连架杆 B
C 连架杆
3
1
A
4
D
最新课件
12
机 (1)改变杆件长度 —— 曲柄滑块机构
械
设 计
曲线导轨曲柄滑块机构
基
C
础
C
平
2
面
连
B
杆1
机
机
械
设
计
基
础
内容
平 面
• 平面四杆机构的基本类型
连 杆
• 平面四杆机构的演化
机 构
• 平面四杆机构的特点及设计
了解常用四杆机构的基本类型和应用。 对急回特性、传动角、压力角、死点位置等有明确概念。
最新课件
1
机 一、铰链四杆机构
械 设 计 基 础
平
面
连
机械原理课件第八章

A D B’ C’ B B’ C’ B
C
C
2) 已知机架AD=50mm的长度,又知连杆BC=30mm的 两个对应的位置,设计四杆机构。
C2
B2
B1
C1
2) 已知机架AD=50mm的长度,又知连杆BC=30mm的 两个对应的位置,设计四杆机构。
C2
B2
B1
C1
3)已知主动件AB的三个位置和连杆上点K所对应的三个 位置,确定连杆上铰链C的位置。
2)行程速比系数
当曲柄转过180°+θ 时,摇杆从C1D位置摆到C2D。 所花时间为t1 , 平均速度为V1,那么有:
t1 (180 ) / V1 C1C2 t1
C1C2 /(180 )
t2 (180 ) /
显然:t1 >t2
当曲柄以ω 继续转过180°-θ 时,摇杆从C2D,置 摆到C1D,所花时间为t2 ,平均速度为V2 ,那么有:
曲柄滑块机构
(1)克服死点的方法
1)利用安装飞轮加大惯性的方法,借惯性作用使机构闯过死点。 2)采用将两组以上的同样机构组合使用,且使各组机构的死点位置 相互错开排列的方法。 折叠桌的折叠机构
(2)死点的应用 例:飞机起落架收放机构
D A C B
(3)按给定的急回要求设计四杆机构
设计铰链四杆机构,设已知摇杆CD的长度LCD=75mm,行程速比系 数K=1.5,机架AD的长度LAD=100mm,摇杆的一个极限位置与机架间 的夹角为φ=45º ,试求曲柄LAB和连杆的长度LBC。
缺点:
① 运动链长,累积误差大,效率低; ② 惯性力难以平衡,动载荷大,不宜用于高速运动; ③ 一般只能近似满足运动规律要求。
§8—2平面四杆机构的类型及应用
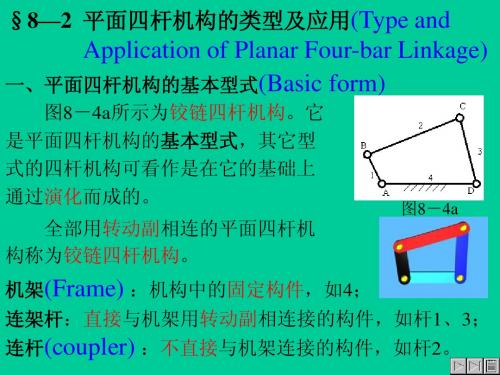
图8-3
振动筛机构
在双曲柄机构中,有两种特例: 1)平行四边形机构:其相对两杆平行且相等,如图8-7a 所示。
其运动特性是:
①两曲柄作等速同向转动; ②连杆作平移运动。
图8-7a
应用实例: 图8-8所示的机车车轮的联动机构就利用了特性① ;
图8-8
如图所示的摄影平台升降机构和图8-9 b所示的播种 机料斗机构则是利用了特摇杆长度相等。 图8-12b所示的汽车、拖拉机前轮的转向机构。
图8-12b
二、平面四杆机构的演化型式
(Evolution of Planar Four-bar Linkage)
1、四杆机构演化的目的: 满足运动方面的要求、改善受力状况、满足结构设 计上的要求。 2、四杆机构的演化方法: 1)改变构件的形状和运动尺寸
在图8-14,b所示的曲柄滑块机构中,B点相对于C 点的运动轨迹是αα。
连杆2做成滑块
αα 做成导轨
图8-14 b)
曲柄滑块机构 演化
图8-15 a) 双滑块机构
连杆长→∞,
αα →直线
图8-15 b)
正弦机构s=LABsinψ
2)改变运动副的尺寸
扩大转动副B的半径
使之超过曲柄的长度
图8-16 a) 图8-16 b) 演化 偏心轮机构
摇杆3做成滑块 ββ做成导轨
具有曲线导 轨的曲柄滑 块机构
图8-13 a )
图8-13 b )
图8-13 a )
摇杆长→∞, ββ →直线 摇杆3 →滑块, 转动副D →移动副 偏置(eccentric or e≠0
offset)
对心(in-line) e=0 图8-14 曲柄滑块机构
曲柄滑块机构(slider-crank mechanism)常用在冲床、 内燃机、空压机等机械中。
机械原理--平面连杆机构及其设计 ppt课件
9
平行四边形机构应用举例
天平
B C
A
D
平行四边形机构运动不确定问题 第一种可能 第二种可能 改进措施 加虚约束构件 或加焊接构件
注意:在长边做机架的平行四边形机构中,当各构件位于一
条直线时(两曲柄与机架共线时)从动曲柄有可能反转,即
在曲柄通过机架位置时,存在pp运t课件动不确定。
10
3)逆(反)平行四边形机构
通过机构的倒置,曲柄摇杆机构可演变成如下机构:
C
C
B
B
A
D
曲柄摇杆机构
C
A
D
双曲柄机构 C
B
B
A
D
A
D
曲柄摇杆机构
ppt课件 双摇杆机构
26
•讨论1 (1)当已判明四杆机构有曲柄存在时,取不同构件为 机架会得到不同的机构: ■取与最短杆相邻的构件为机架则为曲柄摇杆机构 ■取与最短杆相对的构件为机架则为双摇杆机构 ■取最短杆为机架则为双曲柄机构
θ称为极位夹角。
摇杆的最大摆角:
注意:急位夹角为曲柄 两特殊位置间所夹锐角
BB
1 AA
B1
C1C
B2 B B
CC
CCC2
DD
BB
ppt课件
28
急回特性 摇杆的第一个极位
进程:摇杆从第一个极位DC1摆向第二个极位DC2的运动过程
对应进程曲柄转过的角度:α1 =180°+θ
对应摇杆从 C1D 位置摆到 C2D 转过的角度:φ
(4) 机构急回特性用于非工作行程可以节省时间
本节课后作业:8-1~8-3,8-5~8-9
ppt课件
32
曲柄滑块机构急回特征的判断
四杆机构的图解法设计

➢图解设计问题——作图求解各铰链中心的位置问题。ຫໍສະໝຸດ FiEiCi
B
i
A
D
i =1、2、···、N
➢各铰链间的运动关系:
固定铰链 A、D : 圆心 活动铰链 B、C : 圆或圆弧
➢机构的倒置原理
平面四杆机构的设计(4/6)
为了求活动铰链的位置,可将待求活动铰链所在的 杆件视作新机架,而将其相对的杆视为新连杆。
返回返回81连杆机构及其传动特点82平面四杆机构的类型和应用83平面四杆机构的基本知识84平面四杆机构的设计85多杆机构84平面四杆机构的设计牛头刨床机构1满足预定的连杆位置要求连杆机构设计的基本问题是根据给定的要求选定机构的型式确定各构件的尺寸同时还要满足结构条件动力条件和运动连续条件等
第八章 平面连杆机构及其设计
接下来,将原机构的各位置的构型均视为刚体,并 向某一选定位置相对移动,使新机架的各杆位置重合, 便可得新连杆相对于新机架的各个位置,即实现了机构 的倒置。
这样,就将求活动铰链的位置问题转化为求固定铰 链的位置问题了。 这种方法又称为反转法。
2.2图解设计的具体方法 (1)按连杆预定的位置设计
平面四杆机构的设计(5/6)
即要求连杆能占据一系列预定位置; (2)满足预定的运动规律的要求(又称实现函数的问题) 例2 流量指示机构 即满足两连架杆预定的对应位置要求;
(3)满足行程速比系数的要求
例3 牛头刨床机构 即满足给定行程速比系数K的要求等。
平面四杆机构的设计(3/6)
2. 用作图法设计四杆机构
2.1 图解设计的基本原理
§8-1 连杆机构及其传动特点 §8-2 平面四杆机构的类型和应用 §8-3 平面四杆机构的基本知识 §8-4 平面四杆机构的设计 §8-5 多杆机构