机械原理第七章其它常用机构及组合机构
机械原理第七章 其它常用机构及组合机构
二、其它常见机构类型
万向联轴节 非圆齿轮机构 螺旋机构 摩擦传动机构 挠性传动机构
三、广义机构
随着科学技术的发展,在工程当中除了各类机械机构外, 利用液、气、电、磁、声、光、温度等的致动原理而发展起来 了液压、气动、电磁、光电、微位移等各种机构。由于利用了 一些新的工作介质或工作原理,广义机构比传统机构更简便地 实现运动或动力转换,因而获得了日益广泛的应用。这些机构 统称为广义机构。 液压机构 气动机构
(五)星轮机构
星轮机构是由针轮与摆线齿轮组成 的不完全齿轮机构。 主动轮1为不完全针轮,针轮设有 若干个柱销;从动轮2为若干摆线齿和 锁止弧间隔分布的摆线齿轮,称为星轮, 针轮1连续转动1周,星轮实现一个运动 周期的间歇运动。星轮机构的动停比可 方便地由增减主动针轮的柱销数来改变。 星轮机构具有槽轮机构的起动性能,又 兼有齿轮机构等速转位的优点,但星轮 的加工制造较困难。星轮机构多用于转 速不高和载荷较轻的场合。
由若干同类或不同类型的机构组合而成为组合机构,可以 充分发挥各类机构的优点并克服其局限,以实现更为复杂和精 确的运动规律。
电磁传动机构
光电机构 微型机构
第二节 组合机构
随着科学技术的进步和工业生产的发展,对生产过程的机械 化和自动化程度的要求愈来愈高,单一的基本机构越来越难以满 足自动机、自动生产线的复杂多样的运动要求,这时可将多个基 本机构按一定的方式组合起来,形成组合机构。
一、机构的组合方式
二、常见组合机构类型
电影放映机送片机构
六角车床刀架转位机构
磨床分度装置
自动传送链装置
(三)不完全齿轮机构
(1)不完全齿轮机构的组成及工作原理 不完全齿轮机构是由普通齿轮机构演变而来 主动轮1轮齿并没有布满整个圆周, 而只有1个或几个轮齿,其余部分为外凸 锁止弧。其从动轮2可以是普通齿轮,也 可由数个轮齿和内凹锁止弧相间布置。 主动轮1连续转动,当轮齿相啮合时,带 动从动轮2转动;当轮齿退出啮合时,锁 止弧锁止定位,从而实现从动轮的间歇 运动。
机械原理基础知识点总结,复习重点
机械原理知识点总结第一章平面机构的结构分析3一. 基本概念31. 机械: 机器与机构的总称。
32. 构件与零件33. 运动副34. 运动副的分类35. 运动链36. 机构3二. 基本知识和技能31. 机构运动简图的绘制与识别图32.平面机构的自由度的计算及机构运动确定性的判别33. 机构的结构分析4第二章平面机构的运动分析6一. 基本概念:6二. 基本知识和基本技能6第三章平面连杆机构7一. 基本概念7(一)平面四杆机构类型与演化7二)平面四杆机构的性质7二. 基本知识和基本技能8第四章凸轮机构8一.基本知识8(一)名词术语8(二)从动件常用运动规律的特性及选用原则8三)凸轮机构基本尺寸的确定8二. 基本技能9(一)根据反转原理作凸轮廓线的图解设计9(二)根据反转原理作凸轮廓线的解析设计10(三)其他10第五章齿轮机构10一. 基本知识10(一)啮合原理10(二)渐开线齿轮——直齿圆柱齿轮11(三)其它齿轮机构,应知道:12第六章轮系14一. 定轴轮系的传动比14二.基本周转(差动)轮系的传动比14三.复合轮系的传动比15第七章其它机构151.万向联轴节:152.螺旋机构163.棘轮机构164. 槽轮机构166. 不完全齿轮机构、凸轮式间歇运动机构177. 组合机构17第九章平面机构的力分析17一. 基本概念17(一)作用在机械上的力17(二)构件的惯性力17(三)运动副中的摩擦力(摩擦力矩)与总反力的作用线17二. 基本技能18第十章平面机构的平衡18一、基本概念18(一)刚性转子的静平衡条件18(二)刚性转子的动平衡条件18(三)许用不平衡量及平衡精度18(四)机构的平衡(机架上的平衡)18二. 基本技能18(一)刚性转子的静平衡计算18(二)刚性转子的动平衡计算18第十一章机器的机械效率18一、基本知识18(一)机械的效率18(二)机械的自锁19二. 基本技能20第十二章机械的运转及调速20一. 基本知识20(一)机器的等效动力学模型20(二)机器周期性速度波动的调节20(三)机器非周期性速度波动的调节20二. 基本技能20(一)等效量的计算20(二)飞轮转动惯量的计算20第一章平面机构的结构分析一. 基本概念1. 机械: 机器与机构的总称。
机械原理组合机构

机械原理组合机构机械原理是研究和分析机械工作原理和运动规律的学科,它是机械设计的基础课。
而组合机构是由若干个副动件与主动件相联结构成的,用于实现机械运动传递或者转换的装置。
组合机构可以实现各种不同的运动传递和转换,广泛应用于工业生产和日常生活中。
组合机构的分类有很多种,常见的有平面机构、空间机构、连杆机构等。
平面机构是在同一平面内运动的机构,常见的有曲柄滑块机构、摩擦滑块机构等;空间机构是在三维空间内运动的机构,常见的有球面机构、凸轮机构等;连杆机构是由若干个连杆构成的机构,根据连杆连接方式的不同,可以分为平面连杆机构和空间连杆机构。
在机械原理中,组合机构的设计和分析都离不开运动分析和力学分析。
运动分析主要是分析机构的运动学特性,包括机构的自由度、运动链、滞环以及运动规律等;力学分析主要是分析机构的力学特性,包括受力分析、力传递和传动比等。
这两个方面的分析对于组合机构的设计和优化都具有重要的意义。
组合机构的设计需要考虑诸多因素,如机构的传动比、运动速度、精确度、布置紧凑度、稳定性等。
传动比是指输入输出转速之比,决定了机构的运动规律和运动速度;运动速度是指机构中各副动件的运动速度,要满足机构的工作要求;精确度是指机构计算值和实际值之间的误差,要求精密度高;布置紧凑度是指机构结构的紧凑程度,要占用空间小;稳定性是指机构的稳定性和可靠性,要考虑机构的振动和噪声问题。
在组合机构的设计中,常见的机构有摩擦滑块机构、曲柄滑块机构、摩擦轮机构等。
摩擦滑块机构是利用摩擦力传递运动的机构,广泛应用于制动器、离合器等装置中;曲柄滑块机构是利用转动运动和滑动运动综合传递运动的机构,常见于往复运动的工作装置中;摩擦轮机构是利用摩擦轮与工件接触产生转动运动的机构,常用于升降装置和传送带等。
总之,机械原理中的组合机构是一种用于实现机械运动传递和转换的装置,通过运动分析和力学分析可以设计和分析各种组合机构。
在设计组合机构时需要考虑传动比、运动速度、精确度、布置紧凑度和稳定性等因素,常见的机构有摩擦滑块机构、曲柄滑块机构和摩擦轮机构等。
机械原理 机构

机械原理机构
机械原理是研究机械运动规律及其产生的基本原理的学科。
机构是机械装置中的一个基本构件,用于实现机械运动的转换、传递与控制。
机构的基础概念包括驱动件、从动件和连杆等。
其中,驱动件通过外力或动力源产生驱动力,从动件受到驱动力的作用而产生运动,而连杆则是将驱动件与从动件连接起来,传递驱动力与运动。
机械原理中的机构有多种分类方法,常见的有平面机构和空间机构。
平面机构是指机构中的运动仅限于一个平面内的机构,而空间机构则允许运动在不同平面之间转换。
根据结构特征和运动方式,机构还可以分为平动机构、回转机构、滚动机构和曲柄机构等。
机械原理中的机构设计要考虑到多种因素,如结构强度、运动平稳性、工作效率和可靠性等。
在设计过程中,需要进行运动分析和受力分析,确保机构能够正常运行并承受预期的载荷。
同时,还需要考虑制造成本和使用方便性等因素,进行综合权衡,得到合理的机构设计方案。
除了在机械工程中应用,机械原理也被广泛运用于其他领域,如航空航天、汽车工程、机电一体化、机器人技术和精密仪器等。
机械原理为各种机械装置的设计与研究提供了理论基础,推动了机械工程的发展与创新。
机械原理--其他机构

华中科技大学机械学院
外啮合轮齿式棘轮机构 Externally meshed tooth ratchet mechanism
内啮合轮齿式棘轮机构 Internally meshed tooth ratchet mechanism
华中科技大学机械学院
棘条机构 Ratchet rack mechanism
华中科技大学机械学院
外槽轮机构 External Geneva drive
内槽轮机构 Internal Geneva drive
华中科技大学机械学院
槽条机构 Geneva rack mechanism
华中科技大学机械学院
球面槽轮机构 Spherical Geneva drive
华中科技大学机械学院
槽轮机构 1 与 6 导杆机构 7 串联 8 S
2 4 5
3
6 7 D 2 S = g[f()] S M S = g( ) B 5 4
1
A
5
4
3
华中科技大学机械学院
(二)机构的并联组合
以一个多自由度机构作为基础机构,将 一个或几个自由度为1的机构(可称为附加 机构)的输出构件接入基础机构,这种组合 方式称为并联组合。
并联组合的几种常见方式:
华中科技大学机械学院
误差校正机构
1 2 2
S1 3
Ⅲ
1
1
2
Ⅱ
2
3
华中科技大学机械学院
(三)机构的混接式组合
综合运用串联—并联组合 方式可组成更为复杂的机构, 此种组合方式称之为机构的 混接式组合。
华中科技大学机械学院
(四)机构组合设计举例
步骤: (1)根据机械的工作原理确定执行构件所 要完成的运动; (2)将执行构件的运动分解成机构易于实 现的基本运动或动作,分别拟订能完成这 些基本运动或构型的方案; (3)将上述各机构构型方案按某种组合方 式组成一个新的复合机构。
机械传动系统与控制系统设计简介
二、肥皂压花机的传动路线及传动比的分配
肥皂压花机是在肥皂块上利用模具压制花纹和字样的自动机, 其机械传动系统的机构简图如图3.3.7所示。
27
精选ppt
(1)传动路线分析 具体传动路线如图3.3.8。
28
(2)传动比分配
若该机的工作条件为:电动机转速1450r/min,每分钟压制50 块肥皂,要求传动比误差为2。以下对上述方案进行传动比分配 并确定相关参数。
i 总 i 1 i 2 i 3 2 .5 3 .7 3 9 3 .0 9 5 2 8 .9 3 29
相对误差i为
ii总 i总2928.930.24%
i总
29
按传动比误差小于2%的要求,且各传动比均在常用范围之内, 故该传动链传动比分配方案可用。
精选ppt
2)辅助传动链
皂块送进和成品移位运动的工作频率应与模具往复运动频率相
14
精选ppt
(5)啮合器变速 啮合器分普通啮合器和同步啮合器两种,广泛应用于汽车、
叉车、挖掘机等行走机械的变速箱中。 啮合器一般都采用渐开线齿形,齿形参数可根据渐开线花键
国家标准选定。由于啮合套使用频繁,齿轮经常受冲击,齿端和 齿的工作面易磨损,因此,齿厚不宜太薄。为减小轴向尺寸,啮 合器的工作宽度均较小。
15
精选ppt
三、无级变速器
无级变速传动能根据工作需要连续平稳地改变传动速度。图 3.3.5为双变径轮带式无级变速传动的工作原理图 。
无级变速器有多种型式,许多型式已有标准产品,可参考产 品样本或有关设计手册选用。
16
精选ppt
第三节 机械传动系统方案设计
一、机械传动系统方案设计的过程和基本要求
21
精选ppt
机械原理机构
机械原理机构
机械原理机构是机械设备中起到传递和转换动力的组成部分。
它由各种机械元件按照一定的方式组合而成,可实现物体的运动和力的传递等功能。
机械原理机构的设计需要考虑机械元件的尺寸、形状、材料等因素,以确保机构的稳定性、合理性和可靠性。
在机械原理机构的设计中,需要了解机械元件的运动和力学原理。
例如,常见的机械原理机构有齿轮传动、连杆机构、凸轮机构等。
这些机构根据其特定的设计原理,可以实现不同的功能和运动方式。
齿轮传动是一种常见的机械原理机构,它由多个齿轮组成,通过齿轮之间的啮合来传递动力和运动。
在设计齿轮传动时,需要考虑齿轮的齿数、模数、压力角等参数,以确保传动的平稳和高效。
连杆机构是利用连杆的运动实现力的传递和转换的机械原理机构。
它由杆件和连接件组成,通过杆件的运动来实现力的传递和转换。
在设计连杆机构时,需要考虑连杆的长度、角度等参数,以确保机构的运动平稳和力的传递可靠。
凸轮机构是利用凸轮的运动实现力的传递和运动的机械原理机构。
它由凸轮、从动件和驱动件组成,通过凸轮的运动来驱动从动件的运动。
在设计凸轮机构时,需要考虑凸轮的轮廓、凸轮轴的转动方式等参数,以确保机构的运动轨迹准确和从动件的运动稳定。
除了以上三种常见的机械原理机构,还有许多其他类型的机构,如滑块机构、曲柄机构等。
每种机构都有其特定的设计原理和应用领域,可以根据具体的需求选择合适的机构进行设计和应用。
在机械工程设计中,机械原理机构是非常重要的组成部分,它的设计和选择直接关系到机械设备的性能和使用效果。
因此,对于机械工程师来说,掌握和理解机械原理机构的原理和设计方法是非常重要的。
(完整版)常见运动功能的机构选型汇总
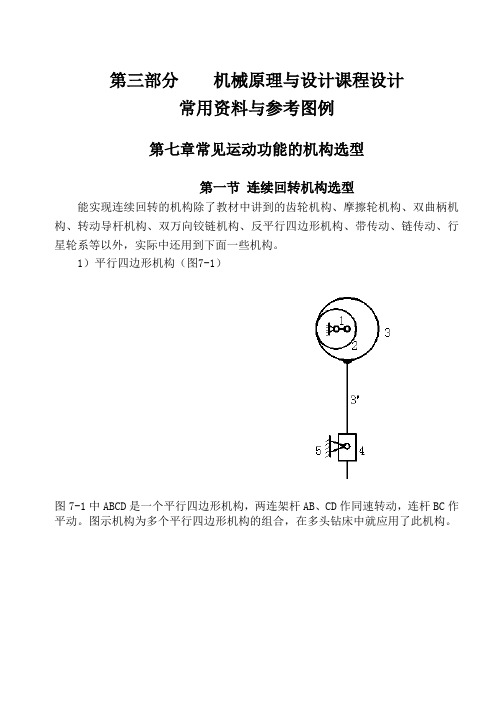
第三部分机械原理与设计课程设计常用资料与参考图例第七章常见运动功能的机构选型第一节连续回转机构选型能实现连续回转的机构除了教材中讲到的齿轮机构、摩擦轮机构、双曲柄机构、转动导杆机构、双万向铰链机构、反平行四边形机构、带传动、链传动、行星轮系等以外,实际中还用到下面一些机构。
1)平行四边形机构(图7-1)图7-1中ABCD是一个平行四边形机构,两连架杆AB、CD作同速转动,连杆BC作平动。
图示机构为多个平行四边形机构的组合,在多头钻床中就应用了此机构。
图7-1 图7-22)摆动齿轮行星减速机构(图7-2)图7-2中主动件1与导杆3,上的内齿轮3固联,而齿轮2从动。
当曲柄1匀速回转时,齿轮2变速回转,其平均转速为:式中为主动件1的转速,、为齿轮2、3的齿数。
3)极限四杆机构(图7-3)图7-3中构件长度l1= l2,l3= l4。
构件1和3的转向相同。
杆1转一周时,杆3转两周。
图7-3 图7-44)以曲柄滑块为基础的转动导杆机构(图7-4)图7-4中的曲柄滑块机构ABC与导杆机构CDE串接在一起。
当时,导杆5可作整周转动。
5)齿轮-连杆机构(图7-5)图7-5a)中的四杆机构ABCD上装有一对齿轮2'和5。
行星齿轮2'和连杆2固联,而中心轮5与曲柄1共轴线并可分别自由转动。
当主动曲柄1以ω1等速转动时,从动齿轮5作非匀速转动,其角速度为:式中为连件2的角速度,、为齿轮2'、5的齿数。
通过改变杆长和齿轮节圆半径,可是从动齿轮5作单方向的非匀速转动,或作瞬时停歇的转动或带逆转的转动。
图7-5b)所示为用于铁板传输机构中的齿轮-连杆组合机构。
齿轮1与曲柄固联,齿轮2、3、4及构件DE组成差动论系。
该轮系的中心论2由齿轮1带动,而系杆DE由四杆机构带动作变速运动,因此,使从动轮4实现变速转动。
a) b)图7-5第二节往复运动机构选型实现往复运动的机构除常见的曲柄滑块机构、曲柄摇杆机构、摆动导杆机构、凸轮机构、齿轮齿条机构、螺旋机构等以外,实际中还用到下面一些组合机构。