反馈控制电路精品PPT课件
合集下载
《高频反馈控制电路》课件
解决方案
为了解决非线性失真问题,可以采取一系列措施,如优化电路设计、减小信号幅度、选择合适的元件等。此外,在电路设计中考虑非线性抑制也是解决非线性失真问题的有效方法。
06
高频反馈控制电路的发展趋势与展望
新型高频反馈控制电路的研究方向:随着技术的不断发展,新型高频反馈控制电路的研究也在不断深入。目前的研究方向主要包括采用新型材料、优化电路设计、提高工作频率等方面。
详细描述
线性度是指高频反馈控制电路在一定工作范围内,输出与输入之间的线性关系。线性度好的电路,其输出与输入成比例关系,能够更好地实现信号的传输和处理。线性度对于保证信号的真实性和准确性至关重要,特别是在高精度和高稳定性的应用中。
VS
噪声性能是衡量高频反馈控制电路性能的重要指标之一,它反映了电路对噪声的抑制能力。
高频反馈控制电路的组成
输入阻抗
输入灵敏度
输入噪声
输入带宽
01
02
03
04
描述输入端对信号源的电阻抗特性,影响信号源的输出电压。
输入电压变化与输入电流变化的比值,表示电路对微弱信号的响应能力。
输入端产生的随机电信号,影响电路性能和稳定性。
输入部分对信号频率的响应范围,限制了电路处理信号的频率范围。
总结词
带宽增益乘积是指高频反馈控制电路在一定带宽内的增益与工作频率的乘积。该指标用于评估电路在不同频率下的增益表现,是衡量电路性能的重要参数。在高频应用中,带宽增益乘积的大小直接影响到电路的动态响应和信号处理能力。
详细描述
总结词
线性度是衡量高频反馈控制电路性能的重要指标,它反映了电路输出与输入之间的关系。
详细描述
噪声性能是指高频反馈控制电路在工作过程中,对内部和外部噪声的抑制能力。噪声性能好的电路能够有效抑制噪声干扰,提高信号的信噪比,从而保证信号传输和处理的准确性。噪声性能对于高频反馈控制电路的可靠性和稳定性具有重要影响。
为了解决非线性失真问题,可以采取一系列措施,如优化电路设计、减小信号幅度、选择合适的元件等。此外,在电路设计中考虑非线性抑制也是解决非线性失真问题的有效方法。
06
高频反馈控制电路的发展趋势与展望
新型高频反馈控制电路的研究方向:随着技术的不断发展,新型高频反馈控制电路的研究也在不断深入。目前的研究方向主要包括采用新型材料、优化电路设计、提高工作频率等方面。
详细描述
线性度是指高频反馈控制电路在一定工作范围内,输出与输入之间的线性关系。线性度好的电路,其输出与输入成比例关系,能够更好地实现信号的传输和处理。线性度对于保证信号的真实性和准确性至关重要,特别是在高精度和高稳定性的应用中。
VS
噪声性能是衡量高频反馈控制电路性能的重要指标之一,它反映了电路对噪声的抑制能力。
高频反馈控制电路的组成
输入阻抗
输入灵敏度
输入噪声
输入带宽
01
02
03
04
描述输入端对信号源的电阻抗特性,影响信号源的输出电压。
输入电压变化与输入电流变化的比值,表示电路对微弱信号的响应能力。
输入端产生的随机电信号,影响电路性能和稳定性。
输入部分对信号频率的响应范围,限制了电路处理信号的频率范围。
总结词
带宽增益乘积是指高频反馈控制电路在一定带宽内的增益与工作频率的乘积。该指标用于评估电路在不同频率下的增益表现,是衡量电路性能的重要参数。在高频应用中,带宽增益乘积的大小直接影响到电路的动态响应和信号处理能力。
详细描述
总结词
线性度是衡量高频反馈控制电路性能的重要指标,它反映了电路输出与输入之间的关系。
详细描述
噪声性能是指高频反馈控制电路在工作过程中,对内部和外部噪声的抑制能力。噪声性能好的电路能够有效抑制噪声干扰,提高信号的信噪比,从而保证信号传输和处理的准确性。噪声性能对于高频反馈控制电路的可靠性和稳定性具有重要影响。
第7章 反馈控制电路
然后进行适当放大后与恒定的参考电平UR比较, 产生一个误差信号ue。 控制信号
发生器在这里可看作是一个比例环节, 增益为k1。 若Ux减小而使Uy减小时, 环路
产生的控制信号uc将使增益Ag增大, 从而使Uy趋于增大。若Ux增大而使Uy增大时, 环路产生的控制信号uc将使增益Ag减小, 从而使Uy趋于减小。无论何种情况, 通
反馈控制电路
8/5/2020 11:03 AM
第7章 反馈控制电路
无AGC电 路
有AGC电 路
反馈控制电路
平均值
8/5/2020 11:03 AM
第7章 反馈控制电路
平均值式AGC电压产生电路的缺点:
一有外来信号,AGC就立刻起作用,接收机的增益就因
受控而减小,这对提高接收机的灵敏度是不利的,这一点对微
作用, 故称为延迟AGC。 “延迟”二字不是指时间上的延迟。
反馈控制电路
8/5/2020 11:03 AM
第7章 反馈控制电路
实现AGC的方法
(1) 改变发射极电流IE
正向AGC 反向AGC
Au0
p1 p2 Yfe g
Y fe
普通晶体管 反向AGC 正向AGC AGC电路
过环路不断地循环反馈, 都应该使输出信号振幅Uy保持基本不变或仅在较小范围 内变化。
反馈控制电路
8/5/2020 11:03 AM
第具7有章 自反动馈控增制益电控路制电路的超外差式接收机方框图如图所示:
检波器的输出信号包含有直流分量和低频交流分量,其中直流电平 的高低直接说明所接受的信号的强弱,而低频分量则反映出输入调幅波的 包络,经RC低通滤波器取出的直流分量经直流放大器放大后就是AGC电 压,去控制混频、高频放大器的增益,︱UAGC︱大,说明输入信号强, 用︱UAGC︱其控制混频、高频放大器的增益使增益减小;︱UAGC︱ 小,说明输入信号弱,用︱UAGC︱其控制混频、高频放大器的增益使 增益增大,达到自动增益控制的目的。
发生器在这里可看作是一个比例环节, 增益为k1。 若Ux减小而使Uy减小时, 环路
产生的控制信号uc将使增益Ag增大, 从而使Uy趋于增大。若Ux增大而使Uy增大时, 环路产生的控制信号uc将使增益Ag减小, 从而使Uy趋于减小。无论何种情况, 通
反馈控制电路
8/5/2020 11:03 AM
第7章 反馈控制电路
无AGC电 路
有AGC电 路
反馈控制电路
平均值
8/5/2020 11:03 AM
第7章 反馈控制电路
平均值式AGC电压产生电路的缺点:
一有外来信号,AGC就立刻起作用,接收机的增益就因
受控而减小,这对提高接收机的灵敏度是不利的,这一点对微
作用, 故称为延迟AGC。 “延迟”二字不是指时间上的延迟。
反馈控制电路
8/5/2020 11:03 AM
第7章 反馈控制电路
实现AGC的方法
(1) 改变发射极电流IE
正向AGC 反向AGC
Au0
p1 p2 Yfe g
Y fe
普通晶体管 反向AGC 正向AGC AGC电路
过环路不断地循环反馈, 都应该使输出信号振幅Uy保持基本不变或仅在较小范围 内变化。
反馈控制电路
8/5/2020 11:03 AM
第具7有章 自反动馈控增制益电控路制电路的超外差式接收机方框图如图所示:
检波器的输出信号包含有直流分量和低频交流分量,其中直流电平 的高低直接说明所接受的信号的强弱,而低频分量则反映出输入调幅波的 包络,经RC低通滤波器取出的直流分量经直流放大器放大后就是AGC电 压,去控制混频、高频放大器的增益,︱UAGC︱大,说明输入信号强, 用︱UAGC︱其控制混频、高频放大器的增益使增益减小;︱UAGC︱ 小,说明输入信号弱,用︱UAGC︱其控制混频、高频放大器的增益使 增益增大,达到自动增益控制的目的。
反馈控制电路
第7章 反馈控制电路
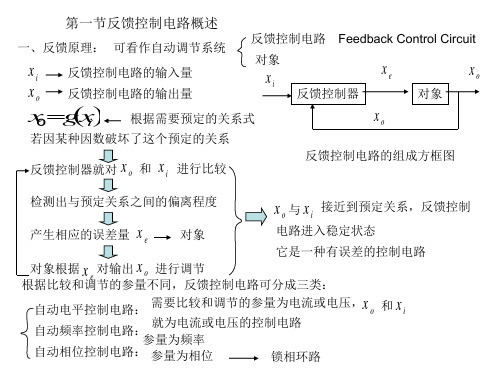
➢ 反馈控制是现实物理过程中的一个基本现象。反馈 控制方法的采用是为了准确地调整某一个系统或单 元的某些状态参数。
如采用反馈控制方法稳定放大器增益是反馈控制在 电子线路领域最典型的应用之一。
➢ 为稳定系统状态而采用的反馈控制系统是一个负反 馈系统。它由下图所示的三部分组成。
输 入 信 号
7.2.1
➢ 自动频率控制(AFC)电路由频率比较器、低通滤 波器和可控频率器件三部分组成,如图7―8所示。
➢ 频率比较器通常是鉴频器,参考频率ωr与鉴频器的 中心角频率ω0相等。
➢ 可控频率器件通常是压控振荡器(VCO),其输出振 荡角频率可写成
y y0kcuc
(7―3)
➢ 自动频率控制电路是利用误差信号的反馈作用来控 制被稳定的振荡器频率,使之稳定。误差信号是由 鉴频器产生的,它与鉴频器的两个输入信号频率差 成正比,显然达到最后稳定状态时,两个频率不可 能完全相等,必定存在剩余频差:y r 。
r r(s)
频 率 比 较 器ue 低 通 滤 波 器uc 可 控 频 率 器 件 r 输 出
Kp
U e(s)
H (s)
U c(s)
Kc
r(s) 信 号
图7―8 自动频率控制电路的组成
7.2.2 应用
自动频率微调电路(简称AFC电路)
➢ 图7―9是一个调频通信机的AFC系统的方框图。这里
是以固定中频fI作为鉴频器的中心频率,亦作为AFC
0
U im in
Uimax
Ui
图7―5 延迟AGC特性曲线
7.1.3 放大器的增益控制
➢由于高频放大器的谐振增益为:
Au0
p1 p2 Y fe g
➢ 反馈控制是现实物理过程中的一个基本现象。反馈 控制方法的采用是为了准确地调整某一个系统或单 元的某些状态参数。
如采用反馈控制方法稳定放大器增益是反馈控制在 电子线路领域最典型的应用之一。
➢ 为稳定系统状态而采用的反馈控制系统是一个负反 馈系统。它由下图所示的三部分组成。
输 入 信 号
7.2.1
➢ 自动频率控制(AFC)电路由频率比较器、低通滤 波器和可控频率器件三部分组成,如图7―8所示。
➢ 频率比较器通常是鉴频器,参考频率ωr与鉴频器的 中心角频率ω0相等。
➢ 可控频率器件通常是压控振荡器(VCO),其输出振 荡角频率可写成
y y0kcuc
(7―3)
➢ 自动频率控制电路是利用误差信号的反馈作用来控 制被稳定的振荡器频率,使之稳定。误差信号是由 鉴频器产生的,它与鉴频器的两个输入信号频率差 成正比,显然达到最后稳定状态时,两个频率不可 能完全相等,必定存在剩余频差:y r 。
r r(s)
频 率 比 较 器ue 低 通 滤 波 器uc 可 控 频 率 器 件 r 输 出
Kp
U e(s)
H (s)
U c(s)
Kc
r(s) 信 号
图7―8 自动频率控制电路的组成
7.2.2 应用
自动频率微调电路(简称AFC电路)
➢ 图7―9是一个调频通信机的AFC系统的方框图。这里
是以固定中频fI作为鉴频器的中心频率,亦作为AFC
0
U im in
Uimax
Ui
图7―5 延迟AGC特性曲线
7.1.3 放大器的增益控制
➢由于高频放大器的谐振增益为:
Au0
p1 p2 Y fe g
第9章反馈控制电路
假设输出信号为:
v ( t ) V cos[ t ( t )] V cos[ ( t )] o om o 0 o om o
统一参考相位:一般两信号的频率是不同的。为了便于 比较,现统一以VCO 的自由振荡相位 o 0 t 为参考 输入信号相位可改写为:
( t ) ( ) t ( t ) t ( t ) 式中:1 i 0 o 0 i 0 i
vFM i
混频器
e
中频 放大器
低通 滤波器
kv
o
压控 振荡器
§6-2 自动相位控制电路(锁相环路PLL)
一、基本组成
鉴相器的输出信号vd(t) 是输入信号vi(t)和压控振荡器输出 信号vo(t)之间相位差的函数。 vd(t)经环路滤波器滤波(也可能包括放大),滤除高频分 量后,成为压控振荡器的控制电压vp(t) 。 在vp(t)的作用下,压控振荡器输出信号的频率将发生相应变 化并反馈到鉴相器。最后进入稳定状态。
( t ) t A v ( t ) dt t ( t )
t o o 0 o 0p o 0 2
▼
时域模型:
v P (t ) v P (t )
Ao
Ao
1
2 (t )
p
2 (t )
p
4、PLL的相位数学模型与环路方程
原理方框图
1 (t )
( t ) ( t ) ( t ) e 1 2
PLL环路的非线性微分方程。
d ( t ) d ( t ) e 1 K H ( p ) sin ( t ) 0 P F e dt dt
d ( t ) d ( t ) e 1 K H ( p ) sin ( t ) 0 讨论: P F e dt dt
v ( t ) V cos[ t ( t )] V cos[ ( t )] o om o 0 o om o
统一参考相位:一般两信号的频率是不同的。为了便于 比较,现统一以VCO 的自由振荡相位 o 0 t 为参考 输入信号相位可改写为:
( t ) ( ) t ( t ) t ( t ) 式中:1 i 0 o 0 i 0 i
vFM i
混频器
e
中频 放大器
低通 滤波器
kv
o
压控 振荡器
§6-2 自动相位控制电路(锁相环路PLL)
一、基本组成
鉴相器的输出信号vd(t) 是输入信号vi(t)和压控振荡器输出 信号vo(t)之间相位差的函数。 vd(t)经环路滤波器滤波(也可能包括放大),滤除高频分 量后,成为压控振荡器的控制电压vp(t) 。 在vp(t)的作用下,压控振荡器输出信号的频率将发生相应变 化并反馈到鉴相器。最后进入稳定状态。
( t ) t A v ( t ) dt t ( t )
t o o 0 o 0p o 0 2
▼
时域模型:
v P (t ) v P (t )
Ao
Ao
1
2 (t )
p
2 (t )
p
4、PLL的相位数学模型与环路方程
原理方框图
1 (t )
( t ) ( t ) ( t ) e 1 2
PLL环路的非线性微分方程。
d ( t ) d ( t ) e 1 K H ( p ) sin ( t ) 0 P F e dt dt
d ( t ) d ( t ) e 1 K H ( p ) sin ( t ) 0 讨论: P F e dt dt
第8章反馈控制电路
式中,τ1=(R1+R2)C, τ2=R2C,R1>> R2。与RC积分滤波器不 同的是,当频率很高时,F(jΩ)|Ω→∞=R2/(R1+R2)是电阻的分压 比,这就是滤波器的比例作用。
第8章 反馈控制电路
无源比例积分滤波器 的频率特性
从相频特性上看,当频率很高时有相位超前校正的作用, 可以 改善环路的稳定性。
提取检测信号,通过检波和直流放大,控制高频(或中频)放大 器的增益。
后置AGC: AGC处于解调以后,是从解调后提取检测信 号来控制高频(或中频)放大器的增益。
基带AGC: 整个AGC电路均在解调后的基带进行处理。基 带AGC可以用数字处理的方法完成。
第8章 反馈控制电路
三 AGC的性能指标
1. KV(可控放大器的增益):
y r时,应该减小振荡频率
因为此时uc 0,所以KC为负值
第8章 反馈控制电路
2.鉴频特性
斜率为Kd
第8章 反馈控制电路
3.无偏差的AFC特性 假设低通滤波器的传 输系数为1,即误差电 压等于控制电压
y0 r时
第8章 反馈控制电路
4.有偏差的AFC特性
y0 r时
稳定频差:
1 Kd Kc
ωy=ωy0+Kcuc 其中ωy0是控制信号uc=0时的振荡角频率,称为VCO的固有振 荡角频率,Kc是压控灵敏度。
注意:环路锁定时,ωy固定不变,但是不等于ωr,还有 剩余频差Δω=|ωy-ωr|,否则无控制信息。
第8章 反馈控制电路
二 AFC电路特性分析
1.VCO的压控特性 y y0 KCuc
说明:1。由于PD的存在,锁相环只对相位进行比较。 2。锁相环是靠剩余相差进行工作(无剩余频差) 3。系统为相位负反馈环路。
第六章反馈控制电路
ve ve
稳态幅差或剩余幅差 Vo mVo mkrv
可控增益越大, A 1Ar Vo m
• 2、应用
(1).自动电平控制电路Automatic Gain Control,AGC
Vom vr ve 0
v s V im k a v tcw o c tsAve
A0 最大
Vim Vom
高频 放大器
• (2)调频负反馈解调电路
调频输入
Wi
We 混频器
中频 放大器
Wo
压控 振荡器
限幅 鉴频器
低通
解调电压输出
滤波器
调频负反馈解调电路
w iw c w mcc o ts w ow L w mc L o ts
w e (w c w L ) ( w m cw m )c L o t 仍s 为不失真的调频波
Vom min AmV ax im min
Vommax/Vommin
能够在A的变化范围, 满足环路的输出控制 在所要求范围内。
Vom ma x AmV inim max AmaxVimmax/Vimmin
A的控制倍数
A max A min
ve A Vom ve/
接收的灵敏度电压 通常取
Amin Vommax/Vommin ( V om m V a o x m m ) in v e m v a e m x in V om m iv n r V im m in v e m i0 n
o t
wo wi
.
VO
(b)
第二节、锁相环路性能分析
• 一、基本环路方程 • 1、鉴相器 锁相环路中鉴相器的输入信号:输入信号电压和VCO电压Vo
鉴相器作用:检测出两信号的相位差,并产生相应的输出电压Vd(t)
稳态幅差或剩余幅差 Vo mVo mkrv
可控增益越大, A 1Ar Vo m
• 2、应用
(1).自动电平控制电路Automatic Gain Control,AGC
Vom vr ve 0
v s V im k a v tcw o c tsAve
A0 最大
Vim Vom
高频 放大器
• (2)调频负反馈解调电路
调频输入
Wi
We 混频器
中频 放大器
Wo
压控 振荡器
限幅 鉴频器
低通
解调电压输出
滤波器
调频负反馈解调电路
w iw c w mcc o ts w ow L w mc L o ts
w e (w c w L ) ( w m cw m )c L o t 仍s 为不失真的调频波
Vom min AmV ax im min
Vommax/Vommin
能够在A的变化范围, 满足环路的输出控制 在所要求范围内。
Vom ma x AmV inim max AmaxVimmax/Vimmin
A的控制倍数
A max A min
ve A Vom ve/
接收的灵敏度电压 通常取
Amin Vommax/Vommin ( V om m V a o x m m ) in v e m v a e m x in V om m iv n r V im m in v e m i0 n
o t
wo wi
.
VO
(b)
第二节、锁相环路性能分析
• 一、基本环路方程 • 1、鉴相器 锁相环路中鉴相器的输入信号:输入信号电压和VCO电压Vo
鉴相器作用:检测出两信号的相位差,并产生相应的输出电压Vd(t)
通信电子线路第7章 反馈控制电路
Uc(s)
Kc
r(s) 信 号
AFC工作原理框图
ue (y r)
2020/4/24
输 出 振 荡 频 率 : yy 0 K c u c
27
7.2.2 AFC 电路的主要性能指标
1. 暂态和稳态响应
可控频率器件通常是压控振荡器(VCO),其输出振荡角频率
可写成:
y y0kcuc
由图可得AFC电路的闭环传递函数
2020/4/24
10
4.控制过程说明
设输出信号振幅Uy与控制电压Uc的关系为
Uy = Uy0+kcuc=Uy0+Δ Uy 根据:Uy =Ag (uc) Ux 得到:Uy =Ag(uc)Ux =[Ag(0)+kguc]Ux 其中:Ag(uc) = Ag (0)+ kguc 又有:Uy0= Ag (0) Ux0
荡频率使之中心频率稳定。
2020/4/24
31
7.3 自动相位控制电路——锁相环路
锁相环路的基本工作原理 锁相环的性能分析 单片集成锁相环路 锁相环的应用
2020/4/24
32
锁相环路的基本工作原理
锁相环路也是一种以消除频率误差为目的的反馈 控制电路。但它的基本原理是利用相位误差电压 去消除频率误差, 所以当电路达到平衡状态之后, 虽然有剩余相位误差存在, 但频率误差可以降低到 零, 从而实现无频差的频率跟踪和相位跟踪。 而 且, 锁相环还具有可以不用电感线圈、易于集成化、 性能优越等许多优点, 因此广泛应用于通信、雷达、 制导、导航、仪表和电机等方面。
增益动态范围和响应时间是AGC电路的两个主要性能指标。
2020/4/24
15
例7.1 某接收机输入信号振幅的动态范围是62dB, 输出信号振幅 限定的变化范围为30%。若单级放大器的增益控制倍数为20dB, 需要多少级AGC电路才能满足要求?
第六章反馈控制电路
根据比较和调节的量不同,反馈控制电路 可分为三大类: 1. 自动电平控制电路 (Automatic Level Control—ALC)。
2. 自动频率控制电路 (Automatic Frequency Control— AFC)。
3. 自动相位控制电路 (Automatic Phase Control— APC)。
第6章 反馈控制电路
主要内容:
重点及要求
1. 反馈控制电路的概念 重点:锁相环路的性能分析。 2. 自动电平控制电路(ALC) 要求:熟悉自动电平控
制电路、自动频率控制
3. 自动频率控制电路(AFC) 电路、自动相位控制电
4. 自动相位控制电路(APC) 路的工作原理;掌握锁
相环路性能分析的基本
5. 锁相环性能分析及应用 方法;了解锁相环路的
6.1.2 自动频率控制电路(AFC)
自动频率控制(Automatic Frequency Control)电路பைடு நூலகம்是 无线电设备中又一常用的反馈控制电路,广泛应用于无 线电发射设备和接收设备,其基本功能是自动调整无线 电设备中振荡器的振荡频率。
一、工作原理
ui(t)
i
混频器
ue(t)
eo
差频 放大器
U im max
Amax
U im min
Am in
U om max U om min
增益控制倍数
变化压缩倍数
已调波功率放大器
包络 检波器
u-
比较 放大器
u+
包络 检波器
已调波输入
放大 和滤波
已调波 已调波线性 输出
功率放大器
6-1-1 自动电平控制电路(ALC)
Au(dB)
2. 自动频率控制电路 (Automatic Frequency Control— AFC)。
3. 自动相位控制电路 (Automatic Phase Control— APC)。
第6章 反馈控制电路
主要内容:
重点及要求
1. 反馈控制电路的概念 重点:锁相环路的性能分析。 2. 自动电平控制电路(ALC) 要求:熟悉自动电平控
制电路、自动频率控制
3. 自动频率控制电路(AFC) 电路、自动相位控制电
4. 自动相位控制电路(APC) 路的工作原理;掌握锁
相环路性能分析的基本
5. 锁相环性能分析及应用 方法;了解锁相环路的
6.1.2 自动频率控制电路(AFC)
自动频率控制(Automatic Frequency Control)电路பைடு நூலகம்是 无线电设备中又一常用的反馈控制电路,广泛应用于无 线电发射设备和接收设备,其基本功能是自动调整无线 电设备中振荡器的振荡频率。
一、工作原理
ui(t)
i
混频器
ue(t)
eo
差频 放大器
U im max
Amax
U im min
Am in
U om max U om min
增益控制倍数
变化压缩倍数
已调波功率放大器
包络 检波器
u-
比较 放大器
u+
包络 检波器
已调波输入
放大 和滤波
已调波 已调波线性 输出
功率放大器
6-1-1 自动电平控制电路(ALC)
Au(dB)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
误差, • 要从卫星信号中提取载波用于解调导航电文, • 要跟随电波传播衰落造成的接收信号强度起伏变
化, • 都要用到反馈控制电路。
• 反馈控制电路为闭合环路,由比较器、控制信号 发生器、可控器件和反馈网络四部分构成,如图7-2 所示。
• 比较器将外加的参考信号r(t)与反馈信号f(t)进行比 较,输出二者的误差信号e(t),再经过控制信号发生 器产生控制信号c(t),对可控器件进行控制,使输出 信号y(t)向误差信号减小的方向变化。
• 经多次循环调整后,输出信号y(t)到达稳定值,误 差信号也不再减小,为一较小的固定值。
图7-2 反馈控制电路组成
• 可控器件的可控制量一般是增益、频率或相位。
• 对应的反馈控制系统分为自动增益控制(AGC), 自动频率控制(AFC)和自动相位控制(APC)。
• 其中自动相位控制电路通常称为锁相环路(PLL), 是应用最广的一种反馈控制电路。
• 7.1 从全球定位系统信号跟踪接收谈起 • 为了提高通信和电子系统的性能指标,在发送和
接收设备中广泛采用具有自动调节作用的控制电路。
• 在具有自动调节作用的控制电路中,反馈控制电 路是最经典,使用最多的电路结构。
• 许多运输和通信设备中安装的全球定位系统(GPS) 接收机,为了实现精确定位,就用了多种反馈控制 电路来跟踪和获取所需定位信息。
• 一般选R2C3=(5~10)/Ωmin。
• 第7章 反馈控制电路 • 本章重点 • 反馈控制电路的组成和自动调节原理; • 自动增益控制电路、自动频率控制电路、锁相
环路的电路组成; • 锁相环路的锁定状态和锁定状态下的剩余相差; • 锁相环路的应用。
• 7.1 从全球定位系统信号跟踪接收谈起 • 7.2 自动增益控制电路 • 7.3 自动频率控制电路 • 7.4 锁相环路 • 7.5 实训
影响接收效果。
• 为了使接收机输出电平变化在允许的范围之内, 必须采用自动增益控制(AGC)电路,使接收机 的增益随输入信号强弱而变化。
• 信号强时增益减少,信号弱时增益增大。
• 7.2.1 工作原理
• 自动增益控制(AGC)电路组成如图7-3所示。
• 输入信号振幅为Ux,可控增益放大器增益Ag为输 出反馈控制信号uc的函数,输出信号振幅Uy可以表 示为
• 若是地面点的定位,3个卫星已够。
• 可再测定位地点离第四颗卫星D的距离,形成的球 面与上述两个点中的一个相交,这个唯一相交的点 就是用户定位地点。
• 经接收机中的微处理器进行定位计算,用户在 WGS-84大地坐标系中的经纬度、高度、速度、时间 等信息便可得知。
• 移动的GPS接收机 • 要跟踪接收移动的卫星信号, • 要减小卫星上的时钟和地球的时钟不同步产生的
•
Uy=Ag(uc)Ux
(7-1)
图7-3 自动增益控制电路组成框图
• ng通常用分贝数表示。 • ng越大,可控增益放大器的增益控制倍数就越大,
在限定的输出信号振幅变化范围内,容许输入信号 振幅的变化就越大,AGC电路的性能就越好。
•
• 例7.1 某接收机输入信号振幅的动态范围是62dB, 输出信号振幅限定的变化范围为30%。若单级放大 器的增益控制倍数为20dB,需要多少级AGC电路才 能满足要求?
• 7.2.2 电路类型 • 通信、导航、遥测、遥控接收机的反馈控制信号
uc大多是利用接收机内中频放大器输出信号经检波 后产生的。
• 按照uc产生的方法不同,而有各种电路形式。 • 1. 简单AGC电路 • (1)晶体管收音机简单AGC电路 • 图7-4所示为晶体管收音机中的简单AGC电路。
பைடு நூலகம்
• 中频放大器放大后的信号送包络检波器检波,检 波输出信号一路由电容器C4耦合到低频放大器放大 输出,另一路由R2C3组成的低通滤波器滤去音频信 号,取出反映接收信号大小的直流电压,作为控制 信号,对中频放大晶体管进行增益控制。
• 图7-1所示为全球定位系统工作原理。
• 全球定位系统包括GPS星座(覆盖全球的24颗卫星)、 地面监控系统(一个主控站,5 个全球监测站和3 个地 面控制站)和GPS信号接收机。
• 地球上任意地点都可以同时观测到4颗卫星。
• 定位地点GPS信号接收机先测离卫星A的距离,比 如说是11,000英里,则定位地点一定在一个中心 在卫星A,半径为11,000英里的球面上。
图7-1 全球定位系统工作原理
• 再测定位地点离卫星B的距离,比如说是12,000 英里,则定位地点一定在中心在卫星A,半径为11, 000英里和中心在卫星B,半径为12,000英里的两 个球面的相交圆上。
• 再测定位地点离卫星C的距离,比如说是13,000 英里,则定位地点一定在上述相交圆与中心在卫星C, 半径为13,000英里的球面相交的两个点上。其中 一个点在地面,一个点在很高的空中。
• 电路中,工作点IE的大小变化与接收输入信号的 大小变化正好相反, 故称为反向AGC。
• 这时,用于中频放大器的晶体管必须具有增益大 小与工作点电流IE大小相反的特性。
• 调节可变电阻R2,可以使低通滤波器的截止频率, 低于解调后音频信号的最低频率Ωmin,避免控制信 号大小随音频信号变化,出现反调制。
• 由于该直流电压为检波输出电压的平均值,所以 又叫平均值式检波器。
图7-4 晶体管收音机中的简单AGC电路
• 接收输入信号大时,控制信号也大。
• 该控制信号加到中频放大PNP型晶体管的基极, 使晶体管的偏压降低,工作点IE减小,因而中频放 大增益减小。
• 接收输入信号小时,控制信号也小。
• 该控制信号加到中频放大PNP型晶体管的基极, 使晶体管的偏压增大,工作点IE增大,因而中频放 大增益增大。
• 7.2 自动增益控制电路 • 自动增益控制电路是通信、导航、遥测、遥控接
收机的重要辅助电路。其主要作用是使接收机的输 出电平保持为一定的数值。
• 因此也称自动电平控制(ALC)电路。 • 接收机所接收的信号强度变化范围很大,最强时
几百mV,最弱时只有几μV,相差达几十分贝。 • 如果接收机增益不变,会使输出电平变化太大,
化, • 都要用到反馈控制电路。
• 反馈控制电路为闭合环路,由比较器、控制信号 发生器、可控器件和反馈网络四部分构成,如图7-2 所示。
• 比较器将外加的参考信号r(t)与反馈信号f(t)进行比 较,输出二者的误差信号e(t),再经过控制信号发生 器产生控制信号c(t),对可控器件进行控制,使输出 信号y(t)向误差信号减小的方向变化。
• 经多次循环调整后,输出信号y(t)到达稳定值,误 差信号也不再减小,为一较小的固定值。
图7-2 反馈控制电路组成
• 可控器件的可控制量一般是增益、频率或相位。
• 对应的反馈控制系统分为自动增益控制(AGC), 自动频率控制(AFC)和自动相位控制(APC)。
• 其中自动相位控制电路通常称为锁相环路(PLL), 是应用最广的一种反馈控制电路。
• 7.1 从全球定位系统信号跟踪接收谈起 • 为了提高通信和电子系统的性能指标,在发送和
接收设备中广泛采用具有自动调节作用的控制电路。
• 在具有自动调节作用的控制电路中,反馈控制电 路是最经典,使用最多的电路结构。
• 许多运输和通信设备中安装的全球定位系统(GPS) 接收机,为了实现精确定位,就用了多种反馈控制 电路来跟踪和获取所需定位信息。
• 一般选R2C3=(5~10)/Ωmin。
• 第7章 反馈控制电路 • 本章重点 • 反馈控制电路的组成和自动调节原理; • 自动增益控制电路、自动频率控制电路、锁相
环路的电路组成; • 锁相环路的锁定状态和锁定状态下的剩余相差; • 锁相环路的应用。
• 7.1 从全球定位系统信号跟踪接收谈起 • 7.2 自动增益控制电路 • 7.3 自动频率控制电路 • 7.4 锁相环路 • 7.5 实训
影响接收效果。
• 为了使接收机输出电平变化在允许的范围之内, 必须采用自动增益控制(AGC)电路,使接收机 的增益随输入信号强弱而变化。
• 信号强时增益减少,信号弱时增益增大。
• 7.2.1 工作原理
• 自动增益控制(AGC)电路组成如图7-3所示。
• 输入信号振幅为Ux,可控增益放大器增益Ag为输 出反馈控制信号uc的函数,输出信号振幅Uy可以表 示为
• 若是地面点的定位,3个卫星已够。
• 可再测定位地点离第四颗卫星D的距离,形成的球 面与上述两个点中的一个相交,这个唯一相交的点 就是用户定位地点。
• 经接收机中的微处理器进行定位计算,用户在 WGS-84大地坐标系中的经纬度、高度、速度、时间 等信息便可得知。
• 移动的GPS接收机 • 要跟踪接收移动的卫星信号, • 要减小卫星上的时钟和地球的时钟不同步产生的
•
Uy=Ag(uc)Ux
(7-1)
图7-3 自动增益控制电路组成框图
• ng通常用分贝数表示。 • ng越大,可控增益放大器的增益控制倍数就越大,
在限定的输出信号振幅变化范围内,容许输入信号 振幅的变化就越大,AGC电路的性能就越好。
•
• 例7.1 某接收机输入信号振幅的动态范围是62dB, 输出信号振幅限定的变化范围为30%。若单级放大 器的增益控制倍数为20dB,需要多少级AGC电路才 能满足要求?
• 7.2.2 电路类型 • 通信、导航、遥测、遥控接收机的反馈控制信号
uc大多是利用接收机内中频放大器输出信号经检波 后产生的。
• 按照uc产生的方法不同,而有各种电路形式。 • 1. 简单AGC电路 • (1)晶体管收音机简单AGC电路 • 图7-4所示为晶体管收音机中的简单AGC电路。
பைடு நூலகம்
• 中频放大器放大后的信号送包络检波器检波,检 波输出信号一路由电容器C4耦合到低频放大器放大 输出,另一路由R2C3组成的低通滤波器滤去音频信 号,取出反映接收信号大小的直流电压,作为控制 信号,对中频放大晶体管进行增益控制。
• 图7-1所示为全球定位系统工作原理。
• 全球定位系统包括GPS星座(覆盖全球的24颗卫星)、 地面监控系统(一个主控站,5 个全球监测站和3 个地 面控制站)和GPS信号接收机。
• 地球上任意地点都可以同时观测到4颗卫星。
• 定位地点GPS信号接收机先测离卫星A的距离,比 如说是11,000英里,则定位地点一定在一个中心 在卫星A,半径为11,000英里的球面上。
图7-1 全球定位系统工作原理
• 再测定位地点离卫星B的距离,比如说是12,000 英里,则定位地点一定在中心在卫星A,半径为11, 000英里和中心在卫星B,半径为12,000英里的两 个球面的相交圆上。
• 再测定位地点离卫星C的距离,比如说是13,000 英里,则定位地点一定在上述相交圆与中心在卫星C, 半径为13,000英里的球面相交的两个点上。其中 一个点在地面,一个点在很高的空中。
• 电路中,工作点IE的大小变化与接收输入信号的 大小变化正好相反, 故称为反向AGC。
• 这时,用于中频放大器的晶体管必须具有增益大 小与工作点电流IE大小相反的特性。
• 调节可变电阻R2,可以使低通滤波器的截止频率, 低于解调后音频信号的最低频率Ωmin,避免控制信 号大小随音频信号变化,出现反调制。
• 由于该直流电压为检波输出电压的平均值,所以 又叫平均值式检波器。
图7-4 晶体管收音机中的简单AGC电路
• 接收输入信号大时,控制信号也大。
• 该控制信号加到中频放大PNP型晶体管的基极, 使晶体管的偏压降低,工作点IE减小,因而中频放 大增益减小。
• 接收输入信号小时,控制信号也小。
• 该控制信号加到中频放大PNP型晶体管的基极, 使晶体管的偏压增大,工作点IE增大,因而中频放 大增益增大。
• 7.2 自动增益控制电路 • 自动增益控制电路是通信、导航、遥测、遥控接
收机的重要辅助电路。其主要作用是使接收机的输 出电平保持为一定的数值。
• 因此也称自动电平控制(ALC)电路。 • 接收机所接收的信号强度变化范围很大,最强时
几百mV,最弱时只有几μV,相差达几十分贝。 • 如果接收机增益不变,会使输出电平变化太大,