FlexRay设计分析
flexray-IP核的设计

为了使先进的汽车应用如线刹和稳定性控制成为可能,业内建立了新的标准FlexRay以提高车载网络的数据率、可靠性和安全性。
FlexRay联盟经过5年工作之后,终于将规范稳定下来。
标准组件已经上市,第一辆装备FlexRay的汽车有望在今年末量产随着FlexRay开始进入实用,现在是汽车电子工程师计划在其设计中添加FlexRay的时候了。
对于那些想把FlexRay集成到新型芯片的公司,现在已经可以获取可综合、经过验证的FlexRay知识产权(IP)。
新的汽车应用如先进引擎和排放控制及线控功能需要许多电子组件,其中每一个都对更高的数据率、确定性的行为和可靠性有强烈的要求。
这就极大地增加了对汽车总线的要求,而FlexRay通信协议的开发正是为了满足这些要求。
FlexRay技术可以被分为三个主要领域:配置和管理FlexRay簇的软件、实现FlexRay协议的数字逻辑及模拟信号驱动器。
在此,我们重点讨论FlexRay IP的数字硬件单元并考虑如何将其集成到系统级芯片(SoC)之中。
如上所示,FlexRay层级的中间层是协议执行层,在此流出的帧数据被发送到物理层。
在一侧,协议执行层与控制器主接口对接,其中包含所有接口数据的存储并给控制器主接口提供服务。
在另一侧,协议执行层与编码/解码层对接。
物理层包含总线驱动器、总线监护选件和物理互连。
概念的最佳分割在设计FlexRay核的过程中,设计工程师应该把重点放在与通信相关的容错设计,而不是放在诸如消息协议算法之类与应用相关的问题。
该范例确保其设计适用于具有不同容错要求的各种应用。
FlexRay核被分为负责处理所有FlexRay特有协议的协议引擎(PE)和负责处理将FlexRay 功能集成到其它系统的所有任务的控制器主接口(CHI)。
CHI主要访问FlexRay核的配置、控制和状态寄存器及消息缓冲器的配置、控制和状态寄存器。
消息缓冲器具有FlexRay帧(已接收帧和待发送帧),包括帧首、有效载荷及帧状态信息。
一种FlexRay总线通讯测试系统设计

犇犲狊犻犵狀狅犳犪犉犾犲狓犚犪狔犅狌狊犆狅犿犿狌狀犻犮犪狋犻狅狀犜犲狊狋犛狔狊狋犲犿
YuanLiwei,LiZhiguo,ZhuXiaorong
(BeijingResearchInstituteofPrecise MechatronicsandControls,Beijing 100076,China) 犃犫狊狋狉犪犮狋:FlexRaybusasakindofhighspeed,flexibleandreliableserialcommunicationbus,hasgraduallybecomethemainstreamof theautomotivenetwork.Inordertoverifythefeasibilityofthebusintheapplicationofspacetechnology,designsatestsystem basedon FlexRaybusTMS570LS3137controllerandPXI8517integratedtestcard.Fromtheaspectofhardwaredesign,platform,protocol,nodede sign,networkdefinitionintroduceddesignschemeoftestsystem,realizethenetworkbetweeneachnodesynchronizationanddatatransceiv er,ultimatelytoachievethecommunicationbetweentheFlexRaynetwork.TestresultsshowthattheFlexRaynetworkcommunicationsys temisfeasibleandreliable,anditissuccessfullyappliedtothedevelopmentoftheNational863projectmechanicalandelectricalsystem with thecharacteristicsofhighspeedandstrongredundancy. 犓犲狔狑狅狉犱狊:TMS570LS3137;PXI8517;FlexRay
Flexray线控总线技术

高速
FlexRay支持高达10 Mbps的数据传 输速率,满足汽车中大量数据传输的 需求。
可靠性
FlexRay具有错误检测和纠正功能, 能够保证数据传输的可靠性。
工作原理
1 2
通信模式
FlexRay支持静态和动态两种通信模式,可以根 据实际需求进行选择。
拓扑结构
FlexRay支持星型和总线型两种拓扑结构,可以 根据汽车内部ECU的分布情况进行选择。
的领域,其优势可能无法充分发挥。
对实时性的 依赖
由于FlexRay总线的通信机制和硬件资源限制,其支 持的节点数量有限,可能不适合大规模分布式系统。
04
FlexRay线控总线与其他总线的比较
CAN总线
总结词
CAN总线是一种广泛应用于汽车行业的通信协议,具有高可靠性和良好的实时 性。
详细描述
CAN总线采用基于优先级的通信方式,支持多主节点同时通信,具有较高的数 据传输速率和较低的延迟时间。然而,CAN总线在处理大量数据和复杂通信时 可能会遇到带宽限制。
随着汽车电子化程度的不断提高,对汽车内部通信的要求也 越来越高,FlexRay总线技术正是在这样的背景下应运而生。
技术发展历程
FlexRay总线技术最初由BMW和戴姆勒-克莱斯勒于1999年联合开发,旨在为汽车 内部通信提供一种高性能、高可靠性的总线系统。
自推出以来,FlexRay总线技术得到了广泛的认可和应用,已成为汽车内部通信的标 准之一。
市场前景
增长的市场需求
竞争格局变化
未来发展方向
随着汽车电子化程度的不断提高,对 线控技术的需求也在不断增长。 FlexRay总线技术作为汽车线控技术 的关键组成部分,其市场需求将进一 步扩大。
基于FlexRay的线控转向系统设计

检测执行模块的状态 信息。通信 网络是整个线控转向系统 的 核心 ,负责连接转 向盘模块与执行模块 ,决定了整个线控转 向系统的安全可 靠性 。
基金项 目:科技部创新基金资助项 目(8 223o58 Oc 6 l203)
作者骱
: 宋 ̄ (9 1 , ,副教授、博士 ,主研方向 : 17 一) 女 嵌入式
s f r n a d r mp e n a in m e o s W i h e p o e sa e e e to i o to i h e l a ft e ma l c r ni onr lu i s o wa e a d h r wa e i l me t to t d . t t e h l ft l v lc r n c c n r lu t t h h h n ,t o d o i e e to c c to n t i h n r du e , ih C c i v e rc n r ft e se rn .E p rme t lr s l h w a e d sg a a ie t e r a —i o r ft e se rn - e c d wh c a a h e e b ae o tol h t ei g x e i n e u t s o t tt e i n C r lz lt n o a s h h n e h e me c nt o h t e i g ol b - r y t m . y wies s e
网络中的作 用是提供物理层功能和物 理总线与通信控制器之
间的接 口。总线收发器有 2个独立 的 FeR y通道 ,消息缓 l a x 冲器 的数据长度可配置成 0 2 4B t。 - 5 ye
用于采集轮速信号 。
4 节点软件设计
FlexRay总线控制器CIC310的应用设计

模块 、 时钟管 理模块 、 中断模 块 、 内存 、 据处 理和校 验模 数
块, 以及 数 据 接 口模 块 等 组 成 。 CC 1 I 3 0和 总 线 接 口有 2个 独 立 的 收 发 通 道 , 个 通 每
器 和 外 部 数 据 接 口均 采 用 串 口 方 式 。 而 英 飞 凌 公 司 的
检 测 和 控 制 。 D P将 各 个 节 点 数 据 进 行 处 理 , 于 采 用 S 由 C 2系列 D P 可 以 实 现 语 音 和 图 像 信 号 处 理 的 复 杂 6 S,
算 法。
Fe R y总线 控 制 器 C C 1 lx a I3 0与 外 部 设 备 以 并 口 方 式 连 接 , 有 较 高 的数 据 传 输 速 率 。 具 C C 1 线 控 制 器 的 内部 结 构 如 图 1 示 。从 图 中 I3 0总 所
一
据速率外 , l R y总线 也 可 以工作 在 较低 的数 据 速率 。 Fe a x
速 度 低 于 1Mb s , 许 支 持 传 输 总 线 结 构 ; 度 在 p 时 允 速 1Mb s 上 时 , 同 的 节 点 利 用 主 动 星 型 耦 合 器 以点 到 p以 不 点 方 式 进 行 连 接 。在 数 据 通 信 方 式 上 , l R y总 线 同 时 Fe a x 支持 分布式控制系 统 , 可补充 C 并 AN、 I 和 面 向 媒 体 应 LN 用 的 MOS T光 学 数 据 总 线 等 主 要 车 内 网络 标 准 。 Fe R y 线 提 供 消 息 冗 余 传 输 或 非 冗 余 传 输 两 种 l a总 x 选 择 , 统 可 以进 行 优 化 , 提 高 可 用 性 或 吞 吐 量 。用 户 系 以 无 需 调 整现 有 节 点 中 的 软 件 就 可 以 扩 展 整 个 系 统 ; 时 , 同 支 持 总 线 或 星 型 拓 扑 结 构 。F eR y总 线 提 供 了大 量 配 l a x 置 参 数 , 以 支 持 对 系 统 进 行 调 整 , 通 信 周 期 的 持 续 时 可 如 间、 消息 长 度 等 , 满 足 不 同 应 用 场 合 的 需 求 。FeR y 以 l a x 总 线 在重 负 载 下 可 以关 闭 部 分 节 点 , 其 仅 接 收 数 据 而 不 使 发 送 数 据 , 少数 据 重 发 次 数 , 得 总 线 负 载 很 快 减 轻 。 减 使
基于μC-OS-Ⅱ的线控转向中的FlexRay总线通信设计

FlexRay总线调研报告
FlexRay总线调研报告汽车电子已成为汽车行业的一个重要市场。
汽车电子行业最大的热点就是网络化[1]。
如今的汽车,已然是一个移动式的信息装置,通过车内网络系统,可以接收、发送并处理大量的数据,对某些状况做出必要的反应。
未来汽车的发展趋势必然是自动化程度越来越高,使汽车更安全、更可靠、更舒适,这意味着在车内使用更多的传感器、传动装置及电子控制单元,这也将对车载网络提出更高的要求。
针对未来汽车车载网络的发展要求,FlexRay应运而生。
FlexRay关注的是当今汽车行业的一些核心需求,包括更快的数据速率,更灵活的数据通信,更全面的拓扑选择和容错运算等。
FlexRay的出现,弥补了既有总线协议应用在汽车线控系统或者同安全相关的系统时容错性和传输速率太低的不足,并将逐步取代CAN总线成为新一代的汽车总线[2]。
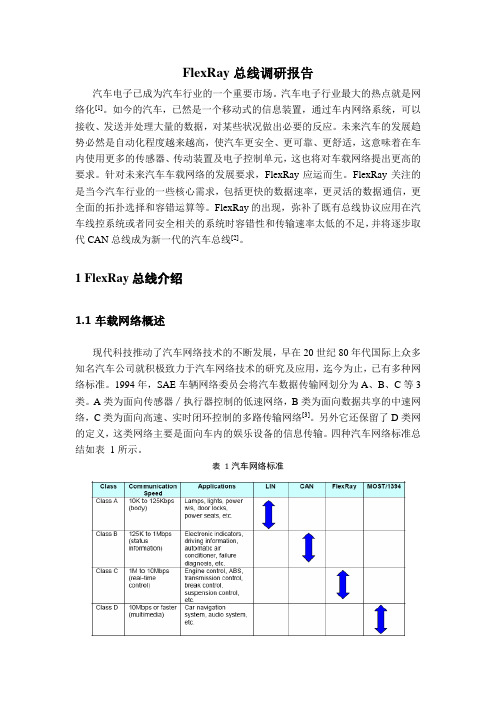
1FlexRay总线介绍1.1车载网络概述现代科技推动了汽车网络技术的不断发展,早在20世纪80年代国际上众多知名汽车公司就积极致力于汽车网络技术的研究及应用,迄今为止,已有多种网络标准。
1994年,SAE车辆网络委员会将汽车数据传输网划分为A、B、C等3类。
A类为面向传感器∕执行器控制的低速网络,B类为面向数据共享的中速网络,C类为面向高速、实时闭环控制的多路传输网络[3]。
另外它还保留了D类网的定义,这类网络主要是面向车内的娱乐设备的信息传输。
四种汽车网络标准总结如表1所示。
表1汽车网络标准A类网络主要面向传感器、执行器控制,是低速网络。
在该类网络中对实时性要求不高,且不需要诊断功能,数据速率一般在1~10Kbps,主要应用于电动门窗、座椅调节、灯光照明等控制。
目前A类网络协议主要有TTP/A(Time-Triggered Protocol)、LIN(Local Interconnect Network)等协议。
B类网络主要面向独立模块间的数据共享,是中速网络,该类网络适用于对实时性要求不高的通信场合,数据速率一般在10~100Kbps,主要应用于电子车辆信心中心、故障诊断、仪表显示、安全气囊等系统,以减少冗余的传感器和其他电子部件。
FlexRay息线控制器和TC1796的MLI接口设计

p e ms to. ( 稿专 ar e ec c投 用) p@ n. r n n
维普资讯
l_ l。 | l _0 萋鏊 l _ l 0 0 l l l l 整蛰
维普资讯
Fe R y息 线 控制 嚣和 lx a T 19 C 6的 M 接 口设 计 7 L I
■ 国 营 第 7 厂 3 1 ■ 南 昌 大 学
蔡 湘 平 汪 安 民
李 安
关键词
TC 7 6 MLI 口 C C3 0 F e Ra 1 9 接 I 1 lx y总线
速数 据 传 输 , 快 数 据 传 输 速 率 达 到 3 . p , 全 满 最 7 5Mb s完 足 2 0Mb s 总线 数 据 速 率 。 ×1 p 的
道 的数 据 传输 速 度 可 达 1 p , 内 E—R y 块 主 要 0Mb s片 a模
负责 总线 数据 的收 发 、 线和 D 总 MA模块 的数 据 交互 、 向
引 言
FeR y 线 是 一 种 点 对 点 形 式 的 具 有 星 形 拓 扑 结 l a总 x 构 的 数 据传 输 总 线 。提 供 了 传 统 总 线 通 信 协 议 所 不 具 有
的 一 些 特 性 。F e Ra lx y简 化 了 车 载 电 子 设 备 之 间 的 通 信
FeR y总线具 有故 障容 限 , l a x 可提 供 50k p ~ 1 p 0 b s 0Mb s
的确定数据传输速率和 2 4位 C C 循 环冗 余 ) 验 码 。 R ( 校 FeR y总 线 支 持 2 1 p l a x × 0Mb s的数 据 速 率 , C N 与 A 总线 协议 相 比 , 可用 的带 宽 提 高 了 1 ~ 4 0 0倍 。总 线 速 率 的提 高 使 电子 设 备 可 以 快 速从 总 线 获 取 信 息 , 可 以快 速 也
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FlexRay设计、功能和应用Mathias Rausch 博士,飞思卡尔半导体在协议制定5年后,该协议规范(V2.1 )的第二版也在2005年春季出版[1]。
第一批产品已于2003年推出,另外还将在今年推出更多产品。
由于新技术能实现经济高效的新应用的实施,整个行业对它产生了浓厚的兴趣。
在FlexRay功能的基础上,我们将在下文中探讨潜在的应用领域。
然后,我们将更加详细地介绍在 FlexRay中使用的三种机制,并列举一系列示例来讨论FlexRay的几种应用。
最后,我们将讨论可行和不可行拓扑的示例,并简要论述唤醒集群的场景。
在本文的最后,我们将讨论如何计算最优的消息大小。
本文的主要目的是介绍 FlexRay的相关知识,帮助用户了解 FlexRay及其应用的潜力。
A返回FlexRay 概况特性FlexRay提供了传统车内通信协议所不具备的大量特性。
这些特性能为新型应用创造大量的机会。
这些基本特性包括:2 x 10 Mbit/s的数据速率FlexRay支持两个通信信道:每个信道的速度达到10 Mbit/sec。
与CAN协议相比,取决于配置和比较模式的不同,它能将可用带宽提高10-40倍。
同步时基FlexRay中使用的访问方法是基于同步时基的。
该时基通过协议自动建立和同步,以提供给应用。
时基的精确度介于 0.5 gs和10 AS之间(通常为1--2gsS O提前知道消息的延迟时间,保证偏差幅度通信是在周期循环中进行的。
特定消息在通信循环中拥有固定位置,因此接收器已经提前知道了消息到达时间。
至U达时间的临时偏差幅度会非常小,并能得到保证。
冗余和非冗余通信为了增强系统的可用性,FlexRay 提供了冗余传输消息的选项。
消息能够冗余传输,但并不是所 有消息都必须冗余传输,否则会导致带宽的过多损失。
灵活性在FlexRay 开发过程中,主要重点是灵活性。
不仅提供消息冗余传输或非冗余传输两种选择,系 统还可以进行优化,以提高可用性(静态带宽分配)或吞吐量(动态带宽分配)。
用户还可以扩 展系统,而无需调整现有节点中的软件。
同时,它还支持总线或星状拓扑。
它提供了大量配置参 数,可以支持对系统进行调整,以满足特定应用的需求,如通信循环的持续时间、消息长度等。
应用领域 2.1章节中列出的特性使它适合于大量应用领域:CAN 的替代技术在数据速率要求超过 CAN 的应用中,人们现在同时使用了两条或多条 CAN 总线。
FlexRay 是替代这种多总线解决方案的理想技术。
骨干FlexRay 具备很高的数据速率,因而非常适合汽车骨干网络,用于连接多个独立网络。
实时应用,分布式控制系统用户可以提前知道消息到达时间,消息循环偏差非常小,这就使 求的分布式控制系统的首选技术。
以安全为导向的系统FlexRay 本身不能确保系统安全,但它具备大量功能,可以支持以安全为导向的系统(如线控系 统)的设计。
FlexRay 提供了一次"典型转移-,从事件驱动通信(CAN )迁移到时间驱动通信。
这种 因为它不仅会影响新技术的推出,还要求对涉及到的所有方面都进行重新培训。
一旦 就会发现更多应用领域。
kbit/sec 。
在车内通信方面,迁移需要一定时间, 这个迁移步骤完成,协议分类目前已经存在大量专门为汽车应用设计的各种协议。
图 的协议是CAN (大多数情况下是高速 CAN : CAN-C ) 中(低速CAN 最为普遍)。
它能够实现的最高数据速率为1进行了简要介绍。
历史最悠久、同时最广为人知 该协议既部署在动力系统中,也部署在车身应用 1 Mbit/sec ,但网络的传输速率通常低于500FlexRay 成为具有严格的实时要虽然LIN 协议在几年前才制定,但其应用却已十分广泛。
该协议是为传输速率要求较低的经济高效的模块 开发的。
它还特别部署在车身应用中,如座位和后视镜调整、电动窗等。
它可以达到 20 kbit/sec 的速率,足以满足此类应用的需求。
22M FlexRayLINCost图1 :汽车通信协议D2B 协议、MOST 协议及其新版本协议是专为多媒体应用开发的,并且通常只在该领域使用。
该协议不适 合部署到其它领域。
在速度方面,FlexRay 的速度介于CAN 协议和MOST 协议之间,但是由于它具有容错功能,所以更为复 杂。
*返回 功能 本章节将更详细地介绍 FlexRay 中使用的部分机制,包括访问方法、时钟同步和集群启动等。
访问方法使用FlexRay 的通信是在周期循环中进行的。
一个通信循环始终包括静态部分和网络闲置时间( 协议内部流程需要网络闲置时间,并且,在这个时段内,集群的节点之间不进行任何通信(图 通信循环的静态部分基于 TDMA (时分多址)技术。
该技术将固定时槽分配给各个节点,在这个时槽内, 允许节点传输数据。
所有时槽大小相同,并且是从 1开始向上编号。
将1个或1个以上时槽固定分配给每个节点。
在运行期间,该时槽的分配不能修改。
4.2M 一 1M 一125k-CAN-B20k-10M 一 NIT )。
CAN-C除了静态部分以外,通信循环还选择性地组成动态部分。
所谓的呼出消息永远分配给动态时槽。
与大小都相同、始终用于传输的静态时槽相反,只要时槽分配给了节点, 动态部分就只能在需要时才进行传输。
因此,动态部分的可用带宽是动态分配的。
如果消息号码(ID )和时槽号码对应,带有待发呼出消息的节点就会进行传输。
如果没有节点传输,所有节点就会等候,等待的 时间长度正是时槽的长度,然后它们的时槽读数也会增加。
在时槽读数增加以后,所有节点都将检查该时 槽号码是否与呼出消息对应。
如果两者匹配,该节点将发送消息。
所有节点接受这条消息,并且一直等到 它们完全接收了这条消息后再增加时槽读数。
这一过程将会持续,直至到达动态部分。
如果在循环中,没 有或者只有少数节点传输消息,在动态部分的结尾,就会达到更高的时槽数量。
如果有大量节点进行传输, 则到达的时槽数量就比较少。
因此,拥有较高编号的(即优先权较低)呼出消息的节点可能在一个循环中 传输,而不在另一个循环中传输,具体取决于动态部分在其之前已经传输的节点的数量。
要确定消息已经 传输,用户必须在静态部分发送该消息,或者必须将它分配给动态部分中的较低消息编号(即优先权较高)。
时钟同步如果使用基于TDMA 的通信协议,则通信媒介的访问在时间域中控制。
因此,每个节点都必须保持时间同 步,这一点非常重要。
所有节点的时钟必须同步,并且最大偏差必须在限定范围内,这是实现时钟同步的 前提条件。
最大偏差称为精确。
图3:时钟同步机制时钟偏差可以分为相位和频率偏差。
相位偏差是两个时钟在某一特定时间的绝对差别。
频率偏差是相位偏 差随着时间推移的变化。
它反映了相位偏差在特定时间的变化。
"小时槽法"用来访问动态部分的通信媒介。
Cycte 2nCycle 2r +1 Cycle 2jn+1)StaticI dyaNFTStaticdynMT Static NPT Static dyiaMT斜正 频率纠正频率纠正(tea频率釧正i+M Me 亍]Meas测量\相位纠正值的计算 频率纠正值的计直频率纠正Meas.有多种方法可以通过相位纠正和频率纠正实施时钟同步。
FlexRay 使用了一种综合方法,同时实施相位纠 正和频率纠正。
时钟同步是一个控制环路,与其它控制环路一样,它也由测量、计算和设定功能组成。
要测量每个时钟与其它时钟的偏差,所有节点都要在接收期间测量消息的到达时间。
通过静态部分的定时 机制,每个节点都知道消息应当何时到达。
如果消息比预计时间早到或晚到,将能测量得出实际时间与预 定时间之间的偏差。
该偏差代表了传输和接收节点之间的时钟偏差。
借助获得的测量值,可用容错平均算 法计算出每个节点的纠正值 [2]。
在频率纠正中,需要使用两个通信循环的测量值。
这些测量值之间的差值反映每个通信循环中的时钟偏差 变化。
它通常用于计算双循环结束时的纠正值(见上文提及的方法)。
在整个后来的双循环中,都使用该 纠正值。
相位纠正值的计算只需一个循环周期的测量值,一旦接收了所有测量值,即可开始实施计算,并且它必须 在开始相位纠正前完成。
在通信循环末尾,网络闲置时间( NIT )的一部分被保留,用于相位纠正。
正要相隔一个循环实施,避免影响时钟频率偏差的确定。
集群启动FlexRay 中的启动阶段同样也是最复杂的操作阶段之一。
这是因为 但在启动阶段,这种体制还未建立。
由于具备容错功能, FlexRay启动集群时,将会启动 "coldstarter" 程序,该程序始终会出现在多个实例中。
首先,启动传输消息的 coldstarter 被称为 "引导 coldstarter" ,其它 coldstarter 则被称为 "后续 coldstarter" 。
一旦节点被唤醒并完成初始化,它就能在发出相应的主机命令后进入启动流程。
不属于coldstarter 的节点会等候,直到它们至少识别到两个相互通讯的 coldstarter 为止。
coldstarter 自己会监控两个通信循环的传 输信道,以确定其它节点是否正在传输。
如果没有,该节点会开始进行传输,从而成为主要 主要 coldstarter 首先会传输无格式符号, 向其它节点说明: 目前它正在启动该集群, 作为主要 coldstarter 。
在传输符号后(符号即特定数量的无效位),该节点开始启动它自己的时钟,并且开始第一个通信循环。
根据预先定义的集群范围的通信机制,主要 coldstarter 将在其分配的时槽中传输,与其它所有节点一样, 它将只在一个时槽的启动阶段传输。
主要coldstarter 发送的消息可由后续 coldstarter 接收。
在消息身份识别号码(ID )(该号码与时槽编号相 同)的帮助下,接收器能够确定发送器位于哪个时槽。
传输节点的当前循环编号附带在每条消息中发送。
在接收第一条消息后,其它节点等待在下一个通信循环中发送的第二条消息。
一旦收到第二条消息,后续 coldstarter 将开始启动他们的时钟,该时钟由循环编号和接收消息的时槽编号进行初始化。
这样就可以为 传输器和接收器之间的同步时间操作奠定基础。
此外,接收节点会测量第一条消息和第二条消息之间的时 间,该时间与通信循环的循环时间对应。
测量出的时间与本地 coldstarter 时间进行比较。
还可以通过减法 确定可能偏差,频率纠正机制使用该偏差值作为纠正值。
因此,下列 coldstarter 不能使用接收到的循环号 码和时间值(与传输的时间槽对应)来启动时钟,但是它会修改其时基的频率,使它尽可能地接近主要 coldstarter 的值。