一种双模糊解耦控制器的设计与仿真_王敏
无刷直流电机模糊控制系统的建模及仿真分析
([ 差 言 ] ]吾[ 一 ] + J ss[E ) [LL Uc 【 —-,bJ 。兰 ] 厶 00b]l ; M] ( 一 M +[1 0 J[u ]I M J茎 P。 JJ 【+ J J【
r s o s n e t r r b s n s n ee a a tn h n t e o d n r r p ri n li t g a — if r n i l P D) o to . e p n e a d b te o u t e s a d s l- d p i g t a h r i a y p o o t a - e r ld fe e t ( I c n r 1 o n a KEY 0RDS:B W LDCM ; z y c n r l S mu a i n; o ei g; - u c i n Fu z o t o ; i l t o M d ln S F n t o
适 应能力。
关键词 : 刷直 流电动机 ; 糊控 制; 真 ; 模 ;- 无 模 仿 建 S 函数
M o ln nd S m ul to n l s s o z y Con r lSy t m f Br s l s dei g a i a i n A a y i fFu z t o se o u h e s DC o or M t
无刷 直 流 电机 模 糊 控 制 系统 的建 模 及 仿 真 分 析
卿 浩 , 承 林 ,唐 小琦 , 少锋 辜 邱
( 中 科 技 大 学 电气 与 电 子 工 程 学 院 , 3 0 4 武 汉 ) 华 407
基于模糊控制的双闭环系统及仿真分析

( 1 )
额 定 励磁下 的感 应 电动 势 和电磁 转矩 分别 为 :
E:
=
( 2 )
( 3 )
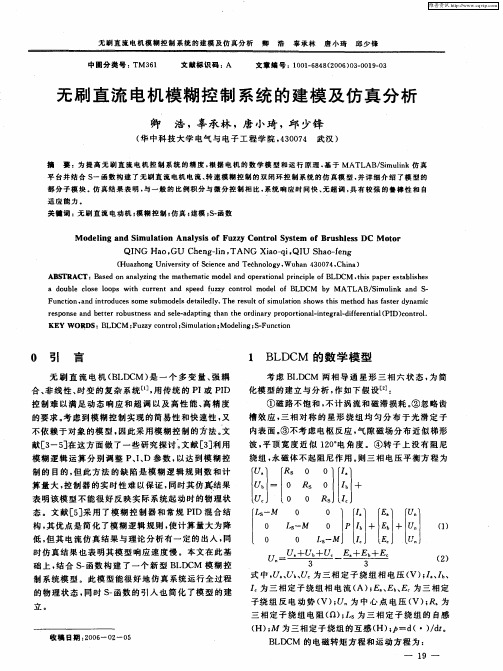
图2 H桥 双 极 性 控 制 原 理 图
忽 略粘 性 摩 擦 及 弹 性 转 矩 , 电动 机 轴 上 动 力 学方程 为 :
五= G D2 d n
一
( 4 )
V V AN G L i a n g .SU N S h o u - j u a n
( 1 . 中国矿业 大学 信息与 电气 工程 学院 ,徐州 2 2 1 0 0 8 ;2 . 江苏 师范大学 电气工程及 自动 化学 院,徐州 2 2 1 0 0 8 ) 搞 耍; 采 用模糊控制 实现直流 电机 双环调速 。文中首先建立 了直流 电机的数学 模型 , 分析 了转速和 电 流双闭环控制 的必要性 ,并 对转速环模糊 控制器设计 。提 出了模糊 P D 并联积分 的控 制器 结 构 ,完善 了P I D 控制器的性 能 , 提 高了系统的控制 精度。最后应用 M A T L A B /S I M U L I N K 工具 箱 , 实现 了直流 电机 模糊控制 系统 的计算机仿 真。仿真结 果表明 , 该方法 比经典P I D 控 制器具 有更快的动态响应和更高的调节精度。 关键词 :模糊控制 ;双环调速 ;s l m u l l n k 仿真 中圈分类号 :T M3 3 文献标识码 :A
0 引言
由于 直流 电动 机 具有 良好 的起 、制 动性 能 ,能 实现大 范 围 内平 滑 调速 ,故煤 矿 电机 车仍 采用 直 流 电机 牵 引。 由于 直 流 电机 系统 本身 的 非 线性 ,P I 调 节器 难 以保持 良好 的控 制性 能 。考 虑 到模 糊控 制 实 现 的简 易性 和 快 速性 ,又 不 依赖 于 对 象 的模 型 , 因
基于Matlabsimlink的模糊PID双闭环直流电机调速

速系统比仅仅使用PI双闭环系统的控制性 能指标有了一定的优化。
3、结论
本文通过对直流调速系统的开环、双 闭环以及模糊PI控制器的双闭环系统进行 了仿真,验证了不同控制系统对于直流电 机调速的控制效果。开环系统冲击电流大, 机械特性差,双闭环控制系统较开环系统 具有明显的硬度,机械特性不易受干扰。采 用带自调整因子的模糊Pl控制器减小了系 统初始的冲击电流,并且响应速度有r明 显的改善,这在工业生产和电力系统自动 控制中具有微高的实用价值。
低于给定转速时,转速调节器的输出增加,
即电流给定上升,并通过电流环调节使电
动机电流增加,从而使电动机获得加速转
矩,电动机转速上升,并通过电流环调节使}
电动机电流下降,电动机将因为电磁转矩
减小而减速。在当转速调节器饱和输出达
到限幅值时,电流环即以最大电流限制实
现电动机的加速,使电动机的启动时间最
短,转速、电流双闭环直流凋速系统的仿真
开环直流调速由于自身的缺点几乎不 能满足生产过程的要求,在应J丰{广泛的双闭 环直流调速系统中,传统PID控制已经得 到了比较成熟的应用。但是受电动机负载 等非线性因素的影响,传统的控制策略在实 际应用中难以保持i殳计时的性能。随着模 糊控制技术应用的日渐成熟,又由于模糊 控制不依赖于被控对象的精确数学模型,能 够克服非线性因素的影响,对调节对象的参 数变化具有较强的鲁棒性,所以将模糊控 制与传统的PID控制结合可以起flltE好的 效果。模糊控制系统中,在当对象参数、 给定或扰动变化过大时,很难获得满意的 控制效果,在此基础提出自调整因子0t.模 糊控制器,根据控制的误差值,通过适当 的调节规则来调整一些关键控制参数值,
基于内模控制的PMSM双闭环调速系统控制器设计与仿真

基于内模控制的PMSM双闭环调速系统控制器设计与仿真张旭秀;孙婧;李卫东;王琳【摘要】为提高永磁同步电机双闭环调速系统响应速度与抗干扰性,给出一种依据内模控制及有功阻尼概念的PMSM双闭环调速系统控制器设计方法.通过建模分析对PI+前馈解耦电流环控制器进行优化,依据内模原理设计出带有箝位积分法抗击分饱和的电流内环解耦控制器.在此基础上,构造有功阻尼代替自然阻尼,利用转速环频带带宽对PI调节器参数进行整定.通过计算机仿真验证,对比传统FOC控制下的调速系统,使用本文所设计的控制器可提升系统响应速度,降低系统超调量,仿真结果表明该方法的有效性.【期刊名称】《大连交通大学学报》【年(卷),期】2019(040)003【总页数】6页(P108-113)【关键词】永磁同步电机;内模控制;有功阻尼;参数整定;抗积分饱和【作者】张旭秀;孙婧;李卫东;王琳【作者单位】大连交通大学电气信息工程学院 ,辽宁大连 116028;大连交通大学电气信息工程学院 ,辽宁大连 116028;大连交通大学电气信息工程学院 ,辽宁大连 116028;大连交通大学电气信息工程学院 ,辽宁大连 116028【正文语种】中文永磁同步电机(permanent magnet synchronous motor,PMSM)具有内在非线性及耦合性,通常采用矢量控制以实现电流与转矩的分别控制.但矢量变换后的PMSM模型仍存在两轴电流相互耦合的非线性及时变性因素,同时其伺服对象也存在较强的不确定性和非线性,加之系统运行时还受到不同程度的干扰,因此,按常规控制策略是很难满足高性能永磁同步电机伺服系统的控制要求的[1].为此,探寻先进“复合型控制策略”以改进作为PMSM伺服系统核心组成部件的“控制器”性能,来弥补系统中存在的不足.文献[2]提出了基于模型的离线式整定与模糊PI在线整定相结合的混合参数整定法,可在线调整性能参数,但在系统运行的不同阶段均需手动修改性能参数;文献[3]针对速度环提出一种复合PI参数整定方法,先利用频域法设计一组PI参数,然后以该PI参数为初始值、ITAE为阶跃响应的评价函数,通过2DOF整定法在初始值附近搜索,使系统工作于最佳控制性能的PI参数值.该方法使伺服系统跟踪性能较好,抗负载扰动性较强,但优化时间长,整定效率低.文献[4]提出改进多亲遗传算法对PI参数进行整定,有效地降低了阶跃响应超调,使稳态性能好,但系统响应速度有待提高.内模控制(Internal model control,IMC)是一种基于过程数学模型进行控制器设计的新型控制策略[5],由于其不需要被控对象的精确数学模型,鲁棒性强,在线调节参数少,结构简单等优点,在电机控制领域中逐渐得到广泛应用[6-7].文献[8-10]分别研究了在不同场合中应用内模原理对PID控制器参数进行整定的方法,这些IMC均作为主控器有效的实现了高性能控制系统的参数整定调节,可见,利用内模原理进行控制器的参数整定是实现高性能PMSM控制系统的一种有效手段.本文在已有文献基础上,设计了一种将内模控制与PI前馈解耦方法相结合的永磁同步电机电流内环控制器,并针对负载扰动引入“有功阻尼”的概念,对转速环PI控制器参数进行整定,最后在此基础上加入积分箝位法进行抗积分饱和控制,降低系统超调量.仿真证明该方法具有快速性高,鲁棒性强,稳定性好的优势.1 PMSM数学模型建立1.1 PMSM数学模型控制对象的数学模型应能够反应被控系统的动静态特性,为准确建立PMSM数学模型,首先做如下假设:①忽略电动机铁芯饱;②永磁材料磁导率为零;③不计涡流和磁滞损耗;④三相绕组是对称均匀的;⑤绕组中感应电感波形是正弦波.电动机的电流方程、电磁转矩方程及运动方程:(1)其中,ud、uq为d、q轴定子电压;id、iq为d、q轴定子电流;Ld、Lq为d、q轴定子电感;φf为转子上永磁体产生的磁动势;J为转动惯量(kg·m2);TL为负载转矩,是输出转矩(N·m);B为粘滞磨擦系数,也称阻尼系数;ωr为转子机械角速度;ωm=pnωr为转子电角速度;pn为极对数.1.2 矢量控制本文采用实际工程应用中常用的id=0的PMSM矢量控制方式,其结构包括转速环PI调节器、电流环PI调节器和SVPWM算法.矢量控制算法应用成熟,本文不再赘述.2 双闭环调速系统设计PMSM调速系统具有速度环和电流环双闭环结构,电流环作为内环是PMSM调速系统中的一个重要环节,它是提高系统响应速度、改善系统控制性能的关键.而速度环则需要增强系统的抗负载扰动能力,抑制速度的波动.本文讨论顺序为先电流环后转速环.2.1 电流环设计为便于控制器设计,重写坐标系下的电流方程为:(2)可以看出,(Lq/Ld)ωmiq和(1/Ld)ωmLdid分别作为id、iq在d、q轴上产生的交叉耦合电动势.解耦后的电压udun-coul、uqun-coupl应为下式所示:(3)对解耦后的d、q轴电压方程式组进行Laplace变换,得:(4)则PI控制器结合电压前馈解耦控制策略即可得到d-q轴的电压为:(5)其中:Kpd和Kid为d轴PI控制器的增益,Kpq和Kiq为q轴PI控制器的增益. 式(5)中的PI控制器参数是按照典型I型系统设计而来的,由于模型误差与参数校正过程中必然存在的失准问题,导致电流环在实际运行中是不完全解耦的.为解决此问题,本文采用内模控制原理对原有PI结构控制器进行改进.2.1.1 内模原理内模控制作为一种先进控制策略,在1982年由Garcia和Morari在受到模型控制算法和动态矩阵控制算法的启发下提出的较为成功的预测控制算法.因其设计原理简单,不需要被控对象的精确数学模型,参数直观明了,控制性能优越等特点,成为了工业控制领域中重要的鲁棒控制方法之一.因此,在这里我们采用图1所示的内模控制策略对电流环的PI控制器进行参数整定.图1 等效内模控制策略结构图图1是典型的内模等效反馈控制结构框图,其中Q(s)为内模控制器,P(s)为被控对象,M(s)是被控对象的数学模型.根据经典的自动控制理论,其中,I是单位矩阵.由图可以看出,若系统模型精确,即M(s)=P(s),且没有外界扰动,则模型的输出与过程输出相等,此时的反馈信号为零.这样的内模系统具有开环结构,表明对开环稳定的系统而言,反馈的目的是克服过程的不确定性.此时的开环传递函数为:G(s)=Q(s)·M(s)(7)因此,若Q(s)和M(s)是稳定的,则系统稳定.电机的电磁时间常数比机械时间常数小得多,近似将电流环看作是一阶系统,故被控模型不包含时滞过程和右半平面零点,根据内模控制器的设计准则,定义M(s)=P(s),引入可实现因子(8)使得Q(s)=M(s)-1·f(s)(9)其中,λ即为设计参数.结合式(8)、(9),得到内模控制器为:(10)并有:(11)将原有PI控制器参数与内模控制器参数相比较,可变参数由2个缩减为1个,其关系式如下:若定义系统阶跃响应从10%~90%所需的时间为tres,则有近似式tres=ln9/λ;且参数λ近似的与系统闭环带宽的倒数成反比,这样便可获得参数λ得初始估计,并可根据需要在线调整.2.2 速度环设计事实上,在工业过程控制中,克服扰动是控制系统的主要任务,上一节中我们设计了针对电流环系统模型不确定且存在扰动的情况下的内模控制器,根据PMSM的运动方程:(13)可以看出,由于负载转矩的随变性,转速环中的负载扰动会比电流环中的更加强烈,文献[11-13]基于消除负载转矩的思想提出了几种抗负载扰动的控制方法.在这里我们引入一个更简单的抗负载扰动的电流控制策略.为本节设计控制器方便,重写电机运动方程:(14)首先,定义“有功阻尼”为:(15)自然阻尼的定义为负载转矩随转子机械角速度的变化量:(16)因为自然阻尼非常小,所以PMSM的运动方程极点十分接近原点,引入“有功阻尼”的概念后,可将闭环极点配置到期望的闭环带宽α上.当采用id=0的控制策略,并假定电机在空载(TL=0)的情况下启动,将有功阻尼带入到系统运动方程中,可得到系统线性化运动学方程:(17)对式(17)进行拉普拉斯变换得:(18)结合式(17)与式(18),得出理想情况下的有功阻尼系数:(19)消去-α处极点,则系统即为由PI控制器构成的闭环系统,α为期望闭环带宽,转速环控制器的表达式为:(20)其中:可见,与传统的PI控制器参数整定相比,若不引入“有功阻尼”,则闭环带宽的选择就只能依靠公式αJ>>bn,此时,J就成为设计转速环控制器的唯一关键参数,而自然阻尼bn又会随着负载的变化而变化,因此Tis的选择就会变得十分困难. 2.3 抗积分饱和以上均是在线性理想情况下所设计的电流内模控制器及转速环PI参数,未考虑到控制量饱和所产生的非线性影响.由于内模控制的积分性质会导致控制器的输出饱和,系统退饱和时间加长,系统超调增大,而实际工业应用中是不容许过大的超调量出现的.因此,为解决由于积分饱和而导致的系统超调问题,本文选择积分箝位法进行抗积分饱和控制.积分箝位控制框图如图2.图2 积分箝位控制框图事实上,启动过程中的转速必然会存在超调现象,但这已经不是按照线性规律的超调,而是经历了饱和非线性区域后的超调,又可称为“退饱和超调”.退饱和超调量、上升时间和调节时间的计算公式分别如下:(21)式中,σrsat为退保和超调量,ΔSmax为转速跌落最大值,Sb为转速跌落量基准值,iqmax为电流限幅最大值,iL为负载电流,K=Kt/J为机械增益(其中Kt是转矩时间常数),TΣs为转速环小惯性群近似后的时间常数,Ω为机械角速度,td是恢复时间.可见,给定转速越小、电流限幅值越大、负载越小,则退饱和超调量越大.3 仿真实验结果研究本文以永磁同步电机为研究对象,采用MatlabR2015a平台进行仿真实验,在Simulink下建立的PMSM双闭环调速系统仿真模型如图3所示.其中仿真电机参数设置为:极对数pn=4,定子电感Ld=5.25 mH,Lq=12 mH,定子电阻R=0.958 Ω,磁链φf=0.1827 Wb,转动惯量J=0.003 kg·m2,阻尼系数B=0.008 N·m·s.依据电流环带宽与电机时间常数之间的关系,即时间常数τ=min{Ld/R,Lq/R},带宽λ=2π/τ,根据电机的参数可以计算得到λ=1 100rad/s,从而根据式(12)可以计算出电流环PI调节器的参数.另外,选取转速环的带宽为α=50 rad/s,将电机参数代入式(19)和式(20)可计算得到转速环PI调节器参数.需要说明,利用电机参数计算得出的PI调节器参数有时并不是最优的,在仿真过程中可以对参数进行调试,以获得最优控制效果.图3 系统整体仿真模型仿真条件设置为:参考转速Nref=1000r/min,初始时刻负载TL=0 N·m,在t=0.2 s时,负载转矩TL=10 N·m,仿真结果如图4、图5所示.(a) 传统FOC三相电流iabc变化曲线(b) 参数整定后三相电流iabc变化曲线(c) 结合抗积分饱和后三相电流iabc变化曲线图4 基于IMC原理参数整定PI调节器的三相PMSM矢量控制系统仿真结果图5 转速Nr变化曲线图4中(c)为使用本文方法所设计出的控制器后得出的系统三相电流变化曲线,(a)、(b)分别是参数整定后及传统矢量控制下的三相电流变化曲线.通过比对,可以明显看出改进后的方法使得电流整定速度更快.从图5可以看出,电机转速上升至参考转速1 000 r/min时,本文中所用方法显示的超调量明显降低,且仍具有快速的响应速度.具体动态参数如表1.表1 动态参数一览表控制方法动态参数上升时间/s调节时间/s超调量/%传统矢量控制0.0110.04222.3参数整定后的矢量控制0.0080.03920.1结合箝位积分法的控制0.0090.0121.7三种控制方法控制的系统稳态均无静差,且在t=0.2 s突加负载转矩的情况下,电机也能较快的恢复到给定参考转速值,说明所设计控制系统具有较好的动态性能和抗扰动能力.4 结论本文针对PMSM控制系统电流环中存在参数摄动、干扰等不确定因素,利用IMC 原理给出了结合电压前馈解耦的PI控制器;引入“有功功率”概念,对速度环参数进行重新整定;并加入积分箝位抗积分饱和法降低系统超调.仿真结果表明,本文中所提出的控制系统设计方法与传统的控制方法相比较,能更好的降低系统超调量,具有良好的鲁棒性及稳定性.但系统仍存在噪声干扰的问题,在接下来的研究中将进一步解决此问题,以期将该方法应用到高精密数控机床和高性能机器人等实际伺服系统中,提高系统的运行效率和控制精度,改善控制性能.参考文献【相关文献】[1]舒志兵.交流伺服运动控制系统[M].北京:清华大学出版社,2006.[2]李鹏,王胜勇,卢家斌,等.PI参数混合整定法在闭环矢量控制系统中的应用[J].智能系统学报,2013,8(5):446-452.[3]肖启明,杨明,刘可述,等.PMSM伺服系统速度环PI控制器参数自整定及优化[J].电机与控制学报,2014,18(2):102-107.[4]苏译,徐晓昂.基于改进遗传算法的PI整定在DTC中的应用[J].微特电机,2012,40(4):13-15.[5]赵志诚,文新宇.内模控制极其应用[M].北京:电子工业出版社,2012.[6]LI SHIHUA,GU HAO.Fuzzy adaptive internal model control schemes for PMSM speed regulation system[J].IEEE Transactions on Industrial Informatics,2012,(4):767-779.[7]GUOHAI LIU ,LINGLING CHEN ,WENXIANG ZHAO, et al.Internal model control of permanent magnet synchronous motor using support vector machine generalized inverse[J].IEEE Transactions on Industrial Informatics,2013,9(2):890-898.[8]黄宴委,熊少华.基于内模控制的永磁同步电机电流环观测器设计[J].中国电机工程学报,2016,36(11):3070-3075.[9]胡文斌,韩璞,刘淼.基于内模的过热汽温串级控制系统PID参数整定[J].计算机仿真,2016,33(6):86-90.[10]徐颖,谢林柏.多变量时滞系统的伴随解耦控制[J].控制工程,2017,24(5):927-932.[11]UMENO T,HORI Y.Robust speed control of dc servomotors using modern two degrees-of-freedom controller design[J].IEEE Trans. Ind.Electron., 1991,38:363-368. [12]IWASAKI M ,MATSUIN.Robust speed control of IM with torque feedforward[J].IEEE Trans. Ind. Electron., 1993,40: 553-560.[13]LIAW G M,LIN F J. A robust speed controller for induction motor drives[J].IEEE Trans. Ind. Electron., 1994,41:308-315.。
基于MATLAB_SIMULINK的直流电机模糊控制的仿真
理论与设计基于MATLAB/SIMULINK的直流电机模糊控制的仿真周小波 王群京 陈 伟 周嗣理安徽大学(230039)Fuzzy Control Simulation for Dc Motor Based on MATLAB/SIMULINKZhou Xiaobo Wang Qunjing Chen Wei Zhou SiliAnhui University双闭环调速系统[2]。
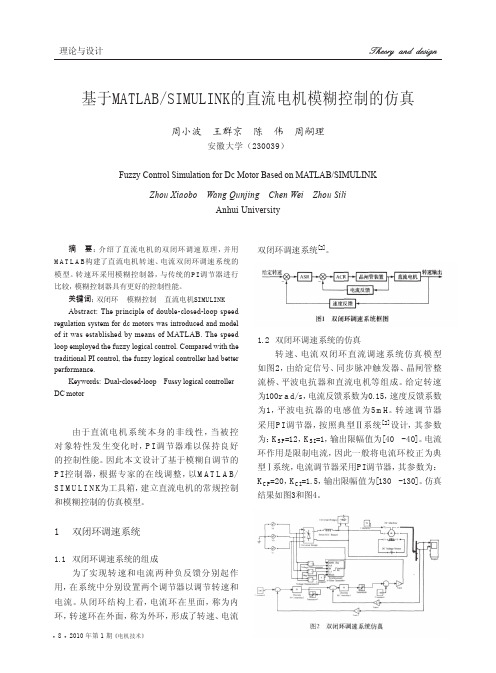
摘 要:介绍了直流电机的双闭环调速原理,并用M A T L A B构建了直流电机转速、电流双闭环调速系统的模型。
转速环采用模糊控制器,与传统的P I调节器进行比较,模糊控制器具有更好的控制性能。
关键词:双闭环 模糊控制 直流电机SIMULINKAbstract: The principle of double-closed-loop speedregulation system for dc motors was introduced and modelof it was established by means of MATLAB. The speed loop employed the fuzzy logical control. Compared with the traditional PI control, the fuzzy logical controller had better performance.Keywords:Dual-closed-loop Fussy logical controller DC motor由于直流电机系统本身的非线性,当被控对象特性发生变化时,P I调节器难以保持良好的控制性能。
因此本文设计了基于模糊自调节的P I控制器,根据专家的在线调整,以M A T L A B/ S I M U L I N K为工具箱,建立直流电机的常规控制和模糊控制的仿真模型。
1 双闭环调速系统1.1 双闭环调速系统的组成为了实现转速和电流两种负反馈分别起作用,在系统中分别设置两个调节器以调节转速和电流。
解耦控制仿真实验(最全版)PTT文档

前言
耦合:操纵变量与被控变量之间是互相影响的,一 个操纵变量的变化同时引起几个被控变量变化的 现象。
前言
解耦:消除系统之间的相互耦合,使各系统成为独 立的互不相关的控制回路。 解得前馈补偿环节的传递函数
解得前馈补偿环节的传递函数 控制通道和干扰通道模型的辨识 被控量和控制量之间的适当匹配;
Gc22(s)
Gv2(s)
D22 (s)
G11 ( s )
G21 ( s )
G12 (s)
G22 (s)
控制通道和干扰通道模型的辨识
由阶跃响应曲线拟合动态模型
解得前馈补偿环节的传递函数
被控量和控制量之间的适当匹配;
控附制加通 解道耦和装干置扰q通i 道模型的辨识
解得前馈补偿环节的传递函数
被控量和控制量之间的适当匹配;
h (3 T ) K (1 a e 3 ) 0 .9h ( 5 )
h (4 T ) K (1 a e 4 ) 0 .9h ( 8 )
辨识方法 切线法 工程法 两点法
• 在HYSYS流程模拟系统上实施
感谢观看
r1 -
r2
-
Kc1 gc1
Kc2 gc2
调节器
1
K11 g11
y1
++
K21 g21
K12 g12
K22 g22
++
y2
2
过程
前馈解耦
r1 -
+
c1
Gc1
D11 (s)
+
1
y11
G11 (s)
y1
+
++
D21 (s)
基于蚁群算法的交叉口两级模糊控制器的设计

鬃■裂蹴YV A L LE工基于蚁群算法的交叉口两级模糊控制器的设计王建强马文阁张廷丰高洪波(辽宁工业大学电气工程学院辽宁锦州121001)信息科学[摘要]采用分级的模糊控制器即优化相序又优化绿灯时间,同时又使控制规则的选取更加容易。
并用蚁群算法对之进行优化,使系统能够自适应选取隶属函数参数,使设胃更加合理。
通过仿真证明,该系统能有效的提高交叉口的通行能力,减少车辆延误。
[关鐾词]智能交通交叉口蚊群算法中固分类号:T P2文献标识码:A文章编号:1671—7597(2005)1210053-'01一、曹曹交叉口是交通阻塞的主要发生点,交叉口信号灯控制系统是城市交通系统中的重要组成部分。
本文利用模糊控制器的分级设计,即优化相序又优化绿灯时间,同时利用蚁群算法改进控制器的设计参数,从而德到更符合实际的信号灯模糊控制器。
二、蕾号灯两级梗●曩撞翻■设计交叉口的相位分为东西和南北两部分,东西放行的时候决不会放行南北相位。
所以一个周期内放行的相序可以有以下几个组合:a bc d,abdc,ba ed,badc,cdab,c dba,de ab.dcba。
(其中abed分别为东西直行.左转和南北直行,左转)。
图l为系统框图。
线詈豳叁譬厂]赣行相位配I客冈圈翼蝴序旧尸萋————一U讨_\’毪二]鸶b放行时圃旧测U翅疽L 器交j潭l选择懊块I撇图1模糊控制系统框图我们设计的模糊控制器分为两级,第一级为相序决策级,第二级为配时决策级。
第一级决定以那一种相位顺序放行(上述八种中的~种)。
第二级决定放行的各相位的放行时间。
具体控制过程为,当一个周期结束后,线圈检测器将榆测到的交通流数据(排队车辆数和车辆到达率)送到第一级模糊控制器作为输入,东西相位选择模块比较东两两相位的排队车辆数,得出东西方向相位顺序(ab或者ba),并将最紧迫相位作为输入送到相序决策模块;同理.得H{南北方向相位顺序(c d或者dc),也将最紧迫相位作为输入送到相序决策模块。
一种模糊解耦控制系统的设计与仿真研究

t e n c s ay if r t n, e y w s o e e p frd c u l g s se h e e s r n omai a n w wa a p n d u e o pi y tm.I s v d t e t u l so e u t n o n o o n t a e h r b e fd d ci fa o o a c r t te t a d l n t cl ac lt d t e d c u l g fr u a r dc ie P o tolrw su e o c n c u ae mah ma i l c mo e a d s t c lu ae h e o p i m l.P e it Ic n rl a s d t o — i r y n o v e
De in a i u a in s a c o o t sg nd S m l to Re e r h fa S r
o f Fuz y De o pl n r lS se z c u i Co t o y t m ng
ZHANG i g, L n ZHANG e —y a Z ENG W n u n, H En — r n a g
型 的辨 识 和 解 耦 器 的 精 确计 算 。并 采 用 预估 P 控 制 器 , 系 统实 施 控 制 。 仿 真结 果 表 明 , 用 的 新 型模 糊 解 耦 方 法 具有 较 I 对 采
好 的解耦能力且简单 、 易行 , 有较强的鲁棒性 。
关 键 词 : 变 量 ; 耦 ; 糊 控 制 多 解 模 中 图分 类 号 :P 7 T23 文 献标 识码 : B
第 7 第8 2卷 期
文 章 编 号 :06— 3 8 2 1 ) 8— 18— 4 10 9 4 (0 0 0 0 1 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
: “* ” 注 表示系统不确定的情况。
表2
E -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 -6 1 0. 5 0. 5 0. 5 0 0 0 -5 1 0. 5 0. 5 0. 5 0 0 0 -4 1 1 0. 5 0. 5 0. 5 0 -3 2 1 1 1 0. 5 0
补偿模糊控制查询表
[1 ]
1
系统关联度分析
Bristo 于 1966 年提出: 多变量耦合控制系统中,
输入、 输出变量间的耦合程度可以用相对增益来表 示
[3]
。某系统输入信号 u i 和输出信号 y j 间的相对
增益定义为 y j u i λ ij = y j u i
Δu = 0
。其发展的代表为 1964 年 Morgan 提出的全解
一种双模糊解耦控制器的设计与仿真
王 敏
1
张
科
1, 2
崇
阳
2
( 西北工业大学明德学院1 , 西安 710124 ; 西北工业大学航天学院2 , 西安 710072 )
摘
要
在实际的工业生产过程中存在着大量输入 、 输出强耦合的非线性控制系统 。 解决耦合问题的经典方法有前馈解耦
法和状态反馈解耦法, 但均需对被控对象进行精确建模 。提出了一种不依赖于被控对象精确数学模型的模糊解耦控制算法 。 依据模糊控制策略和解耦补偿思想, 设计了以模糊控制器分别作为解耦器和主控制器的双模糊解耦控制系统 。 仿真结果表 明, 该方法简单、 易于实现且具有优良的解耦能力 、 较好地动态响应和有较强的鲁棒性能 。 关键词 多变量系统 TP273. 4 ; 模糊解耦 模糊控制 文献标志码 A 中图法分类号
在 MIMO 控制系统中, 输入和输出之间难免存 使用经典的单变量控制系统设 在一定程度的关联, 计方法所达到的控制效果欠佳。 所以, 控制领域的 设计人员提出了解耦思想, 其实质是设计适当的补 将一个 MIMO 耦合控制系统解耦为多个独立 偿器, 的 SISO 系 统, 或将其耦合程度限制在一定范围 内
技
术
与
工
程
13 卷
说明变量间的耦合作用越小,λ ij 越趋近于 0 , 说明 耦合作用越大。 由于相对增益阵 Λ 具有任意列( 或行) 之和为 1 的特性, 因此, 当 λ ij ∈ ( 1 ,+ #) 时,Λ 中某列 ( 或 行) 中一定有小于 0 的数值, 说明正反馈存在于该 系统, 需要对输入输出变量重新配对。
第 13 卷 第 10 期 2013 年 4 月 1671 — 1815 ( 2013 ) 10-2695-05
科
学
技
术
与
工
程
Science Technology and Engineering
Vol. 13 No. 10 Apr. 2013 2013 Sci. Tech. Engrg.
计算机技术
模糊控制具有不建立被控对象精确数学模型 , 但可以实现对非线性、 时变、 大滞后系统控制的特 点
[3 ]
。因此, 本文首先对多输入、 多输出系统的关
联度进行了耦合分析, 然后采用模糊规则设计补偿 解耦控制器和主控制器, 并应用 Matlab 软件对所设 计控制系统进行仿真, 结果表明, 该方法达到了较 好的解耦效果, 且具有更好的鲁棒性。
查表 2 可实现模糊控制器输出信号的正向补偿, 负向补偿时, 查表所得补偿控制量乘以 - 1 即可。 3. 2 主模糊控制器设计 E c 的语言值、 主模糊控制器的模糊集 E 、 等级划 分及隶属函数均与补偿模糊控制器的相同 。 NM, NS, ZO, PS, 模糊集 u2 取 7 个语言值 { NB , PM, PB } , 分别表示 { 负大, 负中, 负小, 零, 正小, 正 中, 正 大} , 划 分 为 15 个 等 级, 即 { - 7 ,- 6 ,- 5 , - 4, - 3, - 2 ,- 1 , 0, l, 2, 3, 4, 5, 6, 7 } 。 应用 Mamdani 型推理法, 建立模糊控制规则如, 表 3 所示。
10 期 表1
E NB NM NS ZO PS PM PB NB IS IS ZO ZO ZO SS SM NM IM IM IS ZO SS SM SM
王
等: 一种双模糊解耦控制器的设计与仿真 敏,
2697
补偿模糊控制规则表
Ec NS IB IM IS ZO SM SM SB ZO * * * ZO * * * PS SB SM SS ZO IM IB IB PM SM SM ZO ZO IS IM IM PB SS SS ZO ZO IS IM IM
根据控制规则, 采用隶属度加权平均决策计算 主模糊控制查询表, 如表 4 所示。
表4
E -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 -6 7 7 7 7 7 4 4 2 2 0 0 0 0 -5 7 7 7 7 6 4 4 2 2 -1 0 0 0 -4 7 7 7 7 6 4 3 2 1 -2 -1 -1 -1 -3 7 7 7 7 4 4 3 2 1 -3 -3 -3 -3
[4 ]
模糊控制器均选用双输入、 单输出的二维模糊控制 器, 输入量均为给定量 r1 ( r2 ) 与输出量 y1 ( y2 ) 之差 构成 的 误 差 信 号 E 及 其 变 化 E c ,输 出 控 制 量 为 u1 ( u2 ) 。 3. 1 补偿模糊控制器设计 NM, NS, 模糊集 E 和 E c 均取 7 个语言值 { NB , ZO, PS, PM, PB } , 分别表示{ 负大, 负中, 负小, 零, 正 小, 正中, 正大 } , 划分为 13 个等级, 即 { - 6 ,- 5 , - 4, - 3, - 2, - 1, 0, l, 2, 3, 4, 5, 6 } 。隶属函数采用 三角线型, 如图 2 所示。
主模糊控制查询表
Ec -2 7 7 7 6 4 3 1 0 0 -3 -4 -4 -4 -1 7 6 6 6 4 3 1 0 -1 -4 -4 -4 -4 0 7 6 6 4 3 1 0 -1 -2 -4 -6 -6 -7 1 4 4 4 4 1 0 0 -3 -4 -6 -6 -6 -7 2 4 4 4 3 0 -2 -2 -4 -4 -6 -7 -7 -7 3 3 3 3 3 -1 -2 -3 -3 -4 -4 -7 -7 -7 4 1 1 1 2 -2 -4 -4 -6 -7 -7 -7 -7 -7 5 0 0 0 1 -4 -4 -4 -6 -6 -7 -7 -7 -7 6 0 0 0 0 -2 -3 -4 -5 -6 -7 -7 -7 -7
图2
模糊变量隶属函数
IM, IS, ZE , SS, 模糊 集 u1 取 7 个 语 言 值 { IB , SM, SB } , 分别表示 { 大补, 中补, 小补, 不补, 小减, 4, 3, 2, 1, 中减, 大 减} , 划 分 为 15 个 等 级, 即 { 5, 0. 5 , 0. 25 , 0, - 0. 25 ,- 0. 5 ,- 1 ,- 2 ,- 3 ,- 4 ,- 5 }, 隶属函数也采用三角线型。
0. 25 - 0. 25 0. 5
- 1 - 0. 5 - 0. 25 - 0. 5 0. 5 0. 25 1 1 1 2
- 0. 25 - 0. 25 - 0. 5 - 1 -1 -2 -2 -3
4
仿真分析
针对某过程控制实验台的压力 - 流量控制系
- 0. 25 - 0. 25 - 0. 5 - 0. 5 - 1 - 0. 5 - 0. 5 - 0. 5 - 1 - 0. 5 - 0. 5 - 1 - 0. 5 - 1 -1 -1 -1 -1 -1 -1 -2
耦状态空间法和 20 世纪 60 年代 Rosenbrock 提出的 现代频率法, 但是这两种方法都要求建立系统的精 确数学模型, 因此, 在实际运用中受到了一定程度 的限制
[2 ]
( 1)
Δy = 0
。
式( 1 ) 中, Δu = 0 ( Δy = 0 ) 表示除 u i ( y i ) 外, 其他 变量的值均为常数。 设双输入双输出控制系统数学模型为:
Ec -2 3 2 2 1 1 0 -1 4 3 3 2 1 1 0 -1 -2 -3 -3 -4 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 -4 -3 -3 -2 -1 0 1 2 3 4 4 5 2 -3 -2 -2 3 -2 -1 4 -1 5 6 - 1 - 0. 5
- 1 - 0. 5 - 0. 5
- K12 K21 ; K11 K22 - K12 K21 - K11 K22 。 K11 K22 - K12 K21
λ11 = λ22 =
1) , 相对增益阵 Λ 中, 如果 λ ij ∈ ( 0 , 说明输入 u i 和输出 y j 间存在着耦合作用。当 λ ij 越趋近于 1 ,
2696
科
学
[Y ] [K G
Y1
2
=
K11 G11 K 12 G12
21 21 K 22
G22
][U ] U
1 2
( 2)
稳态时, 相对增益阵为 Λ =
[λ λ
11 21
λ12 = λ21 =
2012 年 11 月 26 日收到 第一作者简介: 王 基础研究基金( G9KY1004 ) 、 陕西省自然科学基金( 20105Q8015 ) 资助 敏( 1984 —) , 女, 汉族, 陕西省咸阳市人, 硕士, 讲师。研究方向: 智能控制、 模式识别。
。
但该方法所用被控对象的数学模型往往是在 一定的假设条件下成立的, 所以具有不精确性, 而 这种不精确性会在推导过程中传递给补偿器 , 从而 影响最终的控制效果。 模糊控制算法的显著特点是不因被控对象精 确数学模型的建立与否而影响控制效果 。 现利用 模糊规则设计了实现解耦控制的补偿模糊控制器 和实现系统控制的主控制器, 从而构成了双模糊解 其结构如图 1 所示。 耦控制系统,