基于模糊解耦控制的车辆转向制动系统研究
探究史密斯模糊控制的汽车制动系统

探究史密斯模糊控制的汽车制动系统史密斯模糊控制是一种应用广泛的控制方法,它基于模糊理论和模糊逻辑,能够处理复杂系统的控制问题。
在汽车制动系统中,采用史密斯模糊控制可以有效地提高制动系统的性能和稳定性,使汽车在各种路况下都能够实现安全而平稳的制动效果。
史密斯模糊控制在汽车制动系统中的应用主要体现在两个方面:一是在制动力的控制上,二是在防抱死系统(ABS)的控制上。
在汽车制动系统中,史密斯模糊控制可以帮助实现制动力的精确控制,根据不同的路况和驾驶状况对制动系统进行动态调整,确保车辆在制动过程中不会发生失控或打滑的情况。
史密斯模糊控制通过模糊逻辑推理,可以根据车速、路面摩擦系数、驾驶员的刹车行为等多个因素进行综合判断,动态调整制动系统的工作状态,实现最佳的制动效果。
这样一来,不论是在干燥的公路上还是在雨雪天气中,汽车都能够做出合适的制动响应,大大提高了行车安全性。
史密斯模糊控制在防抱死系统(ABS)中的应用同样可以提高汽车的制动性能。
在紧急制动的情况下,ABS系统能够通过快速地刹车踏板脉冲工作方式,防止车轮打滑,确保车辆保持稳定与方向控制。
使用史密斯模糊控制算法可以更准确地判断车轮打滑的情况,并及时做出反应,减少刹车距离,避免侧滑和失控。
这不仅提高了车辆的制动稳定性,也提高了行车安全性。
史密斯模糊控制在汽车制动系统中的应用,可以帮助汽车制动系统更好地适应不同路况和驾驶环境,从而提高行车安全性和驾驶舒适性。
随着汽车技术的不断发展,史密斯模糊控制在汽车制动系统中的应用将会变得更加普遍,并且可以不断进一步提升汽车制动系统的性能。
史密斯模糊控制的基本原理是模糊逻辑。
所谓模糊逻辑就是指用模糊集合来描述输入和输出之间的关系。
它不同于传统的二值逻辑,能够更好地应对真实世界中的不确定性和模糊性。
在汽车制动系统中,史密斯模糊控制利用模糊逻辑对车辆的制动状态进行评估,并根据评估结果动态调整制动系统的工作状态,以实现最佳的制动效果。
自适应模糊控制尾翼设计及其制动性能研究

自适应模糊控制尾翼设计及其制动性能研究陈一哲;汤逸群;王辉;秦博;梁石平;杨柳【期刊名称】《汽车工程》【年(卷),期】2024(46)6【摘要】汽车尾翼是性能车、跑车中关键零部件之一,对汽车的驾驶性能和稳定性有着较大影响。
在汽车行驶过程中,车速、加速度和转向角都是不断变化的,传统尾翼系统设计方法无法兼顾控制系统输入输出之间的非线性关系,以及输入的不确定性。
本文提出基于模糊控制的汽车尾翼设计方法用于解决上述问题,研究了车速和制动踏板行程与尾翼攻角之间的关系,设计了自适应尾翼的执行机构并进行稳定性分析,并对加装尾翼后的车辆进行了制动性能仿真验证。
研究结果表明:采用模糊控制策略可以在车辆行驶过程中自适应控制尾翼位置;设计的机构保证了尾翼传动过程所需的大传动比,并使尾翼能保持在目标位置;使用优化后的尾翼,在低速时驾驶的稳定性良好,而在高速时的制动性能提高了4.7%,制动距离由38.2缩短至36.9 m,缩短了3.3%。
本研究提供了一种自适应车况的汽车尾翼设计思路,可以为汽车尾翼技术提升和产业应用提供参考。
【总页数】11页(P1085-1095)【作者】陈一哲;汤逸群;王辉;秦博;梁石平;杨柳【作者单位】武汉理工大学汽车工程学院;光瑞融科汽车科技(武汉)有限公司;襄阳光瑞汽车零部件有限公司【正文语种】中文【中图分类】U46【相关文献】1.自适应巡航系统的自动制动模糊控制器的设计与仿真2.模糊自适应PID控制器在磁粉制动器加载系统中的应用研究3.单片机控制磁粉制动器模拟加载系统的研究(第1报)磁粉制动器性能试验及控制系统设计与分析4.利用模糊控制理论设计自适应机构的自适应系统的研究5.基于Bang-Bang模糊自适应PID的制动缸压力控制研究因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于模糊控制理论的汽车智能刹车控制算法

一种基于模糊控制理论的汽车智能刹车控制算法
许晓玲
【期刊名称】《科技通报》
【年(卷),期】2012(28)12
【摘要】针对传统的刹车控制方法在一些复杂路段进行刹车控制的时候,存在刹车距离大,控制时间长的缺陷。
为此提出了一种基于模糊控制理论的汽车智能刹车控制方法。
通过建立汽车整车动力模型,通过深入研究刹车控制原理,结合模糊控制理论完成刹车的智能控制。
结果表明模糊控制器可以使得车辆的实时滑移率快速到达并保持在期望滑移率附近,从而使车辆获得最大的地面制动力以提高刹车性能,并在缩短制动距离同时保持方向的可操控性,相比于传统的控制器取得了更好的控制效果。
【总页数】3页(P152-154)
【关键词】刹车控制;模糊控制;制动距离
【作者】许晓玲
【作者单位】宁夏职业技术学院电子与信息技术系
【正文语种】中文
【中图分类】TP393.08
【相关文献】
1.基于模糊控制理论的越野车辆驱动力控制算法研究 [J], 李睿;李春明;吕建国
2.基于修正因子智能权函数的汽车ABS模糊控制算法仿真研究 [J], 李劲松;金志扬
3.基于模糊控制理论的智能交通灯的一种设计方法 [J], 陈克明;谭思云
4.一种基于模糊控制的智能车转向控制算法研究 [J], 孙绍杰;齐晓慧
5.基于模糊控制理论的机械臂PID控制算法优化设计 [J], 郑美茹
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊PID控制的智能小车转向系统设计
基于模糊PID控制的智能小车转向系统设计一、引言智能小车是一种具备自主行驶能力的机器人,广泛应用于工业、仓储、物流等领域。
其中,转向系统的设计是实现智能小车自主导航和路径规划的关键环节。
在本文中,将介绍一种基于模糊PID控制的智能小车转向系统设计方案。
1.系统结构智能小车转向系统的主要组成部分包括传感器、控制器和执行器。
其中传感器用于感知环境和获取车辆当前状态信息,控制器用于分析传感器信息并生成控制指令,执行器则根据控制指令进行相应动作。
2.环境感知为了实现智能小车的自主导航,需要通过传感器获取车辆当前所处位置和周围环境的信息。
一种常用的方法是使用激光雷达进行环境感知,通过扫描周围环境的障碍物,生成地图并定位当前位置。
3.控制算法在智能小车转向系统中,常用的控制算法是PID控制算法。
PID控制算法基于车辆当前位置和目标位置的差异,通过计算比例、积分和微分调节参数,生成控制指令,实现车辆转向。
然而,传统PID控制算法对于非线性和时变系统的控制效果有限。
为了克服这一缺点,本文采用模糊控制器结合PID控制的方式,提高控制算法的适应性和鲁棒性。
模糊控制器能够通过建立一套规则库,根据当前输入变量和模糊规则库进行模糊推理,确定输出变量的控制值。
模糊PID控制算法能够在控制过程中根据系统自身的特性自适应调整。
4.系统建模与仿真为了验证设计方案的可行性和有效性,可以使用Matlab/Simulink等软件进行智能小车转向系统的建模与仿真。
通过建立车辆动力学模型,并引入传感器准确度模型和控制指令噪声模型,得到系统的闭环模型。
在仿真过程中,可以设置不同的路线和障碍物,观察智能小车的转向行为和控制效果。
通过对比不同控制算法的性能指标,选择最佳的转向控制策略。
三、实验结果与讨论在实际实验中,基于模糊PID控制的智能小车转向系统设计表现出较好的性能。
通过采用模糊控制器,系统的抗干扰能力和适应性得到了显著提高。
然而,该设计方案还存在一些改进空间。
基于神经网络逆系统的车辆动力学模型解耦法

基于神经网络逆系统的车辆动力学模型解耦法
常亚妮;郭红戈;张春美
【期刊名称】《太原科技大学学报》
【年(卷),期】2024(45)2
【摘要】为了消除车辆各系统纵横向之间的耦合影响,对车辆动力学模型进行了神经网络逆系统解耦控制。
选用的研究对象为四轮驱动、前轮转向的无人驾驶车辆。
首先,将包含侧向运动和横摆运动两个自由度的车辆动力学模型通过Interactor算
法进行可逆性分析;其次,搭建卷积神经网络(Convolutional Neural
Networks,CNN)和长短期记忆神经网络(Long Short-Term Memory,LSTM)逆系
统结构构建逆系统,并验证该方法的可行性;将该解耦方法应用于无人驾驶车辆的轨
迹跟踪控制设计中,通过CarSim和Matlab/Simulink联合仿真试验证明,设计的CNN+LSTM神经网络逆系统解耦控制在多种工况下都具较好的跟踪特性及稳定性。
【总页数】7页(P125-131)
【作者】常亚妮;郭红戈;张春美
【作者单位】太原科技大学电子信息工程学院
【正文语种】中文
【中图分类】U461
【相关文献】
1.基于神经网络逆系统的感应电机变频系统解耦控制
2.基于BP神经网络的电磁轴承逆系统解耦控制
3.基于神经网络逆系统方法的汽车底盘解耦控制
4.基于神经网
络逆系统的稳压器水位与压力解耦控制探析5.两电机调速系统的神经网络逆无模型自适应鲁棒解耦控制
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车ABS 系统模糊滑模变结构控制器的研究与设计
AUTOMOBILE DESIGN | 汽车设计汽车ABS系统模糊滑模变结构控制器的研究与设计李赫1 江薇21.吉林电子信息职业技术学院 吉林省吉林市 1320212.敦化职业技术学院 吉林省延边朝鲜族自治州 133700摘 要: A BS即防抱死制动系统对于汽车制动安全性能有重要影响,目前在实际应用中的ABS系统使用的绝大多数都是基于门限值的控制方法,由于实验条件有限,该方法受到数据的限制,无法达到很好的效果。
本文深入研究汽车防抱死机理以及变结构控制策略,并以此设计了滑模控制器,并在此基础上应用MATLAB软件实现了半实物仿真,取得很好效果。
关键词:防抱死制动系统;变结构控制策略;模糊滑模控制1 引言从80年代末起,一些高级轿车上开始安装ABS装置,随着汽车电控技术的不断发展,ABS装置现在己经成为轿车的必装部件,其基本功能就是通过传感器检测制动轮任意时刻的运动状态,并根据检测结果相应地调节制动器产生的制动力,从而防止车轮抱死,有利于汽车在制动时制动距离的缩短和方向稳定性的维持,使汽车行驶时的安全性得到保证。
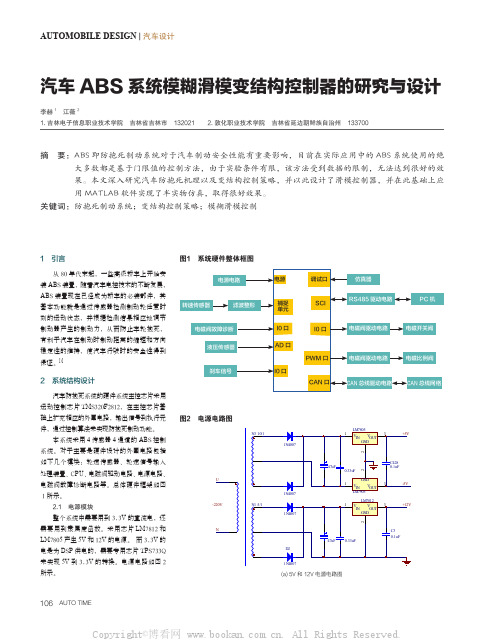
[1]2 系统结构设计汽车防抱死系统的硬件系统主控芯片采用运动控制芯片TMS320F2812,在主控芯片基础上扩充相应的外围电路,输出信号到执行元件,通过控制算法来实现防抱死制动功能。
本系统采用4传感器4通道的ABS控制系统。
对于主要是硬件设计的外围电路包括如下几个模块:轮速传感器、轮速信号输入处理装置、CPU、电磁阀驱动电路、电源电路、电磁阀故障诊断电路等。
总体硬件框架如图1所示。
2.1 电源模块整个系统中需要用到3.3V的直流电,还需要用到隶属度函数。
采用芯片LM7812和LM7805产生5V和12V的电源。
而3.3V的电是为DSP供电的,需要专用芯片TPS733Q 来实现5V到3.3V的转换。
电源电路如图2所示。
图1 系统硬件整体框图图2 电源电路图(a) 5V和12V电源电路图AUTOMOBILE DESIGN | 汽车设计时代汽车 为了减少干扰及匹配电压,采取光电隔离。
机电传动控制系统中的模糊控制算法优化研究

机电传动控制系统中的模糊控制算法优化研究随着现代科技的不断发展,机电传动控制系统在工业生产和自动化领域中的应用越来越广泛。
而在机电传动控制系统中,控制算法的优化是提高系统性能和稳定性的关键因素之一。
本文将围绕机电传动控制系统中的模糊控制算法进行优化研究,旨在提出可行的优化方法和算法,提高机电传动控制系统的性能。
一、模糊控制算法的基本原理模糊控制算法是一种应用于非线性系统的控制方法,在机电传动控制系统中具有广泛的应用。
其基本理念是通过模糊逻辑推理来实现对系统的控制。
模糊控制算法利用模糊集合理论的思想,将输入和输出之间的模糊关系进行建模和描述,然后根据模糊规则进行推理,得到控制指令。
二、模糊控制算法的优化需要尽管模糊控制算法在机电传动控制系统中表现出优秀的性能,但仍然存在一些问题需要解决。
首先,由于模糊控制算法的设计具有一定的主观性,人工经验往往在其中起到决定性作用,导致算法的稳定性和可靠性难以保证。
其次,传统的模糊控制算法往往存在计算复杂度高和运算速度慢的问题,不能适应实时控制的需求。
因此,优化模糊控制算法的研究势在必行。
三、基于遗传算法的模糊控制算法优化遗传算法是一种模拟自然界生物进化过程的优化算法,在解决复杂优化问题上具有优越性。
基于遗传算法的模糊控制算法优化正是将遗传算法与模糊控制相结合,通过优化模糊控制算法的参数和规则,提高系统的控制性能。
在基于遗传算法的模糊控制算法优化中,首先需要将模糊控制的参数和规则进行编码,然后通过遗传算法进行种群的初始化和进化操作。
在种群进化的过程中,通过交叉、变异等操作,不断地优化模糊控制算法的参数和规则。
最后,根据遗传算法进化得到的最优解,重新设计和优化模糊控制算法。
四、基于模糊神经网络的模糊控制算法优化模糊神经网络结合了模糊逻辑和神经网络的优点,可以更好地解决非线性系统的控制问题。
基于模糊神经网络的模糊控制算法优化是将模糊神经网络应用于模糊控制的算法优化过程中,通过神经网络的学习能力和自适应性,提高模糊控制系统的性能。
汽车线控转向系统控制研究

汽车线控转向系统控制研究摘要:为了提高汽车线控转向系统操纵稳定性,对其控制策略进行了研究。
首先,通过分析系统运动学微分方程,采用Matlab/Simulink软件构建汽车线控转向系统的仿真模型。
设计基于车轮转角的改进滑膜控制策略,在双移线变道工况和阶跃信号转向工况下进行多次联合仿真试验。
结果表明,改进的滑膜控制具有良好的控制效果,此研究的线控转向系统可以提高车辆转向操纵的稳定性。
前言由于汽车线控转向系统取消了传统的机械连接,因此必须采用合理的控制策略来实现方向盘与转向执行机构之间的信号传输,以确保转向的准确性和安全性。
文献[1]设计了一种电机转速模型观测器,以便实时监测由于系统参数变化所带来的低频干扰,并对其进行了补偿。
文献[2]通过分析转向系统的几何结构,采用模糊自适应PID控制,有效地抑制了电流误差,提高了助力力矩的精确度。
文献[3]系统地总结了汽车线控转向系统的发展,并分析了线控转向系统的关键控制策略。
文献[4]利用BP神经网络模拟出不同工况下的转向助力矩,仿真结果表明,车辆具有良好的转向轻便性。
SBW系统工作环境较为复杂,容易受到外界干扰的影响,方向盘与转向电机之间的信号转换与传输过程的准确性尤为重要。
本次研究将建立基于前轮转角误差控制的系统模型,以改善系统控制的有效性,提高汽车线控转向的准确性。
1 线控转向系统工作原理及动力学建模1.1 线控转向系统结构与工作原理线控转向系统主要是由方向盘模块和转向执行模块组成,其组成如图1所示。
当汽车转向时,传感器将方向盘的转角、转矩信号传递到主控制器ECU。
ECU根据方向盘转角、转矩及车辆状态等信息,经计算处理后,得到转向电机驱动电流,并通过电机驱动器将其施加给驱动电机,以控制转向执行电机,输出相应的转矩,从而保证汽车稳定转向。
路感电机可以根据路面信息模拟出相应的路感信息,并通过方向盘传递给驾驶员,使其掌握车辆在路面的行驶状态,从而加强对车辆的操控。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 1 . S c h o o l o f Au t o mo b i l e , C h a n g ’ a l l Un i v e r s i t y , S h a a n x i Xi ’ a n 7 1 0 0 5 4 ; 2 . De p a r t me n t o f Au t o mo t i v e En g i n e e r i n g ,
Re s e a r c h o f v e hi c l e s t e e r i n g a n d br a k i ng s y s t e m ba s e d o n f uz z y d e c o u pl i n g c o nt r o l
b r ki a n g s y s t e ms h a s g o o d d y n a mi c c o n t r o l e f e c t , a n d h a s s  ̄o n g r o b u s t n e s s a n d a d a p t a b i l i t y . Ke y Wo r d s : v e h i c l e s t e e r i n g a n d b r a k i n g ; f u z z y d e c o u p l i n g ; Ma t l a b s i mul a t i o n
摘 要 :车辆转 向系统和制动系统之 间存在着很强 的速度耦合关系 ,造成两个系统之 间的性能相互影 响,使得车辆 在 转向制动这一工况 成了汽车 最危 险的工况之一 。 本文结合 实际车辆参数建立转 向系统 的二 自由度模型和制动系统 的单车轮模 型,针对车辆转 向制动工况设计 了模糊解耦控制器 ,实现 了车辆 的转 向与制动 同时控制 。经验证含有模 糊解耦控制的车辆转 向制 动系统具有很好 的动态控制 效果,并且有 很强的鲁棒性和 自适应性 。 关键词 :车辆转 向制动 ;模糊解耦控制 ;Ma t l a b仿真 中图分类号 :U4 6 1 . 2 文献标识码 :A 文章编号 :1 6 7 1 — 7 9 8 8 ( 2 0 1 4 ) 0 9 — 1 9 一 O 4
s i mu l t a n e o u s l y v e h i c l e s t e e r i n g a n d b r a k i ng s y s t e ms . As a r e s u t l , he t uz f y z d e c o u p l i n g c o n t r o l l e r o f v e h i c l e s t e e r i n g a n d
Na n j i n g Un i v e r s i t yo f Ae r o n a u t i c s a n dA s t r o n a u t i c s . J i a n g s u Na n j i n g 2 1 0 0 1 6 )
Ab s t r a c t : T h e s f o n g v e l o c i t y c o u p l i n g r e l a t i o n s h i p s b e t we e n t h e a u t o mo t i v e s t e e r i n g a n d b r a k i n g s y s t e ms a n d t h e s y s t e ms ’ p e r f o r ma n c e o f mu t u a l i n f l u e n c e ma k e he t v e h i c l e s t e e r i n g a n d b r ki a n g wo r k i n g c o n d i t i o n b e c o me o n e o f t h e mo s t d a n g e r o u s c o n d i t i o n s . h i T s p a p e r e s t a b l i s h e d a t wo d e g r e e o f f r e e d o m mo d e l o f a u t o mo b i l e s t e e r i n g s y s t e ms a n d a s i n g l e wh e e l b r a in k g s y s t e m mo d e l b a s e d o n t h e a c t u a l p a r a me t e r s o f v e h i c l e ,a nd d e s i g n e d t h e f u z z y d e c o u p l i n g c o n t r o l l e r f o r c o n t r o l l i n g
设 计 研 究
ห้องสมุดไป่ตู้
汽 车 实用 技 术
A UT O MO BI L E AP PLI ED T EC H NO L 0G Y
2 01 3 年 第9 期
2Ol 3 N 0. 9
基 于模糊解耦控制 的车辆转 向制动 系统研 究
陈燕芹 ,李 晓旭 ,段婷婷
( 1 . 长 安大 学汽 车 学 院 , 陕西 西 安 7 1 0 0 5 4 ;2 . 南 京 航 空 航 天 大 学 车 辆 工 程 系 ,江 苏 南 京 2 1 0 0 1 6 )