GPS 基线处理的优化技术
GPS-静态-基线处理-3.5操作步骤
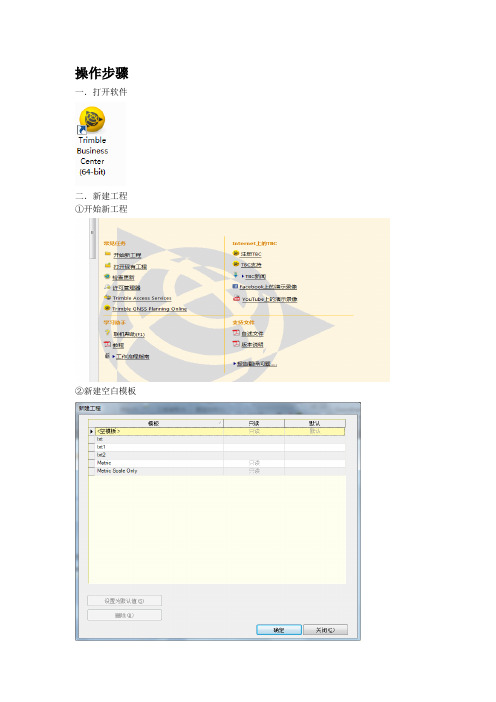
操作步骤一.打开软件二.新建工程①开始新工程②新建空白模板③打开工程设置选择单位——坐标将“东,北,高程”改成“北,东高程”④选择基线处理——质量——将水平精度和垂直精度改成所需范围⑤将工程另存为工程模板⑥输入新建模板名字二.导入数据①在数据选项中——选择导入②将所有数据文件选中后——导入③导入后会出现如下界面,一是观察“文件名”例:“20252930.DAT”前四个数是仪器号2025,293是日期的在当年1月1日到此日期的天数,最后是仪器开机次数;二是观察开始时间。
对应第二张图中的数据填写“点ID”④按照已知填好下列选项⑤点击“确定”和“是”⑥最后工程另存为三.基线处理①在测量中——基线处理②点击保存③用鼠标选中一条基线④点击鼠标右键——基线处理报告或在上边对话框也可以⑤查看图像,将信号不好的卫星时段记下⑥在右键中——时段编辑器中,删除前一步所记下的信号不好的卫星时段每条基线同上两步处理好之后,工程另存为。
四.无约束平差①测量——网平差——选择“平差”——然后选择对话框“权重”点击红线圈起来的按钮改变权重,然后继续“平差”②会显示平差合格,然后点击“确定”五.创建坐标系统①点击下图快捷按钮在“编辑”中“新建组”——输入名称②“编辑”——“新建坐标系”名称与上一步组名称相同,基准面WGS84,“空变换”——确定③确定后,必须输入坐标系的一些参数如下图④“编辑”——“新建地方工程”名称和第一步组名称相同,组选择上两步建的⑤“编辑”——“新建椭球”输入与组名称相同的名称,输入西安80坐标系的参考椭球的半长轴和椭球扁率——“确定”⑥“编辑”——“新建基准面”名称与组名称相同,椭球选择前一步新建的椭球,默认方法选择莫洛登斯基——“确定”⑦然后会出现如下界面,按下图填入⑧保存坐标系⑨选择“更改坐标系”快捷键⑩选择之前建好的坐标系——点击“下一步”选择“预定义的大地水准面模型”按下图选择或填入——点击“完成”六.约束平差①点——右键——添加坐标——属性改为控制质量——三个点选中②网平差③选中下列选项④修改权重——继续平差⑤查看网平差报告⑥对照已知点,查看精度。
GPS控制网基线解算优化方法探讨
第 4期
张海港 等 : S控 制 网基 线解 算优化 方 法探 讨 GP
・7 ・ 5
时 , 当对其 进行 优 化 , 化 的过 程 其 实 就是 用 户 应 优 手工 干 预解算 的过 程 , 主要通 过 以下几种 方法 达到 提 高基 线精度 的 目的 。 1 )提 高起算 点 坐标精 度 基 线解 算 时 软 件 必 须 固 定 一 个 点 的 WGS8 _4 作 为起 算 坐标 , 固定 点 的 选 取非 常 重 要 , 该 因为 该 起算 点 的坐标精 度 将会 对 基 线 解 算结 果 的精 度 产 生影 响 。根据 现有 的设备 和技术 水平 , 准确定 位 要
经验。
d ≤2 2  ̄n + ( ・ ) √ × /。 6 。
式 中: a为 固定误 差 , 位 mm; 单 b为 比误 差 系数 ; d 为相邻 点 间距 , 位 k 单 m。
4 )其 他 手 段 的检 查 测 量
l 观 测 数 据 及 基 线 解 算 质 量 评 定 要
让更 多 的观测 数据 参加 解算 , 既考 虑到 观测 的时 间
长 短又 要顾及 到历 元 间隔 ( 样率 ) 通 常静 态观测 采 ,
素
GP S作 业 在 实 际 作业 过程 中 , 一般 当 天采 集 的数据 要及 时进 行基线 处理 , 以发 现采集 的数 据 中
有 没 有 粗 差 , 观 测 数 据 做 质 量 分 析 评 估 。依 据 规 对
精 度 要求 高 G S控制 网 , P 为更 好 的 检 查其 精 度 情况 , 需要 辅助 全站仪 等 手段对 其边 长等 进行 检 查 , 较差应 符合 相应 的标 称精 度 , 般 应满 足 公 其 一
1 )数 据剔 除率 它 直接 反映 了外业 实 际观测数 据 的质量 , 规范 中规定 , 算 同一 时段 观测 值 的数 据剔 除率 应小 于 计
GPS基线解算的质量控制和精化处理

通过选 择合 适 的点位 和观测 时 间来 保证 观测 条件 ,
在基线 解算 过程 中 , 时也得 不到 质量合 格 的基线 有 解口 。在 这种 情 况下 , 过 对 基 线进 行 精 化 处 理 , ] 通 提高基 线 向量 的解 算 质量 , 减少野 外返 工重测 。
得 其值 在理论 上应 为 0 但在 实 际 的工程 应 用 中所 .
精化处 理来 实 现 。基 线 解算 主要 由以 下 指标 来 ]
进行 质量 控制 。 1 )数据剔 除率
的指标 , 当其 超 限时 , 表 明 重复 基 线 中一 定 存 在 就 质量不 满足要 求 的基 线 。通 过一 条 基线 三次 以上 的复测 结 果 , 常 能 够 确 定 出存 在 质 量 问题 的 基 通
素, 既与 观测值 的质 量有 关 , 与 观 测条 件 的好 坏 也
有关 。通 常要求 Rai≥ 3 t o .
7 )RDOP值
R P值 的大 小与观 测 时段 、 线位 置和卫 星 DO 基
在 空间 中的 几何 分 布 及 运行 轨 迹 有 关 。R P值 DO
反 映 了观 测期 间 GP S卫 星星座 的状 态对 相 对定 位 的影响 , 不受 观测值 质量 的影 响 。 8 )观测 值残 差 的 RMS R MS是 一 个 内符 合 精 度 指标 , MS小 , R 内符
图 4 存 在 多 路 径 效 应 的 R 0号 卫 星 2
图 7 X 1-3 7基 线 解 算 方 案 1 Y 70 4
图 5 X 2 - Y 2基 线 解 算 方 案 1 Y 4X 1
5 )参 考卫 星选取 不适 当 。解算 软件 一般 会 自
动选取 观测 数据 最多 、 周跳最 少且 高度 角较高 的卫
影响GPS基线解算结果的因素分析及应对措施
国土资源(2008年增刊1)134文★大连鹏程工程勘测设计有限公司 熊启生中国人民解放军65015部队 张坤鹏 王智超PS静态定位在测量中主要用于测定各种用途的控制点。
其中较为常见的方面是利用GPS建立各种类型和等级的控制网,在这些方面GPS技术已基本上取代了常规的测量方法,成为了主要手段。
较之于常规方法,GPS在布设控制网方面具有测量精度高;选点灵活、不需要造标、费用低;全天侯作业;观测时间短;操作简便等优点。
基线解算是GPS网观测数据处理过程的重要环节,基线解算质量的好坏直接关系到各条基线的观测精度,从而影响整个控制网的精度。
因此基线解算质量控制以及基线解算过程中数据的处理方法是整个控制网数据处理的关键点。
本文结合GPS定位原理和实际经验,在南方GPS静态处理软件中对于GPS基线解算阶段需要解决的一些关键问题进行论述。
影响GPS基线解算结果的因素影响GPS基线解算结果因素的判别1.基线解算时所设定的起点坐标不准确。
起点坐标不准确,会导致基线出现尺度和方向上的偏差。
2.少数卫星的观测时间太短,导致这些卫星的整周未知数无法准确确定。
当卫星的观测时间太短时,会导致与该颗卫星有关的整周未知数无法准确确定,而对于基线解算来讲,参与计算的卫星,如果与其相关的整周未知数没有准确确定的话,就将影响该条基线解算的精度。
3.在整个观测时段里,有个别时间段里周跳太多,致使周跳修复不完善。
4.在观测时段内,多路径效应比较严重,观测值的改正数普遍较大。
5.多路径效应严重、对流层或电离层折射影响过大。
1.基线起点坐标不准确的判别。
对于由起点坐标不准确所对基线解算质量造成的影响,目前还没有较容易的方法来加以判别,因此,在实际工作中,只有尽量提高起点坐标的准确度,以避免这种情况的发生。
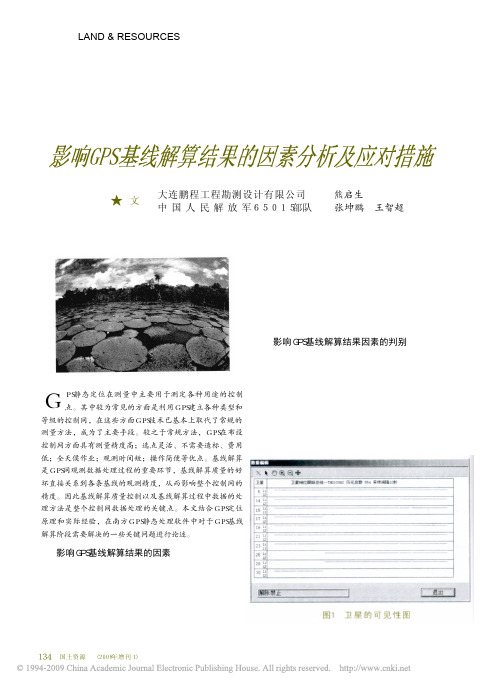
2.卫星观测时间短的判别。
关于卫星观测时间太短这类问题的判断比较简单,只要查看观测数据的记录文件中有关对与每个卫星的观测数据的数量就可以了,南方静态数据处理软件还输出卫星的可见性图(如图1),这就更直观了。
测绘技术中常见的GPS测量误差及其处理方法

测绘技术中常见的GPS测量误差及其处理方法GPS测量误差是测绘技术中常见的一个问题,它会对测量结果的准确性和可靠性产生一定的影响。
本文将从几个方面讨论GPS测量误差及其处理方法,以帮助读者更好地理解和运用GPS测量技术。
一、GPS测量误差的来源GPS测量误差主要来自以下几个方面:1. 星历误差:GPS卫星的轨道预报存在一定的误差,这会导致卫星位置的偏差。
从而引起接收器测量结果的不准确。
2. 电离层延迟:GPS信号在通过电离层时会发生传播速度变化,从而产生延迟。
这种延迟会导致测量结果的偏移。
3. 对流层延迟:GPS信号在通过对流层时也会发生传播速度变化,引起延迟。
这个延迟主要受天气条件的影响,如温度、湿度等,会导致测量误差的增大。
4. 多径效应:GPS信号在传输过程中可能会被建筑物、树林等障碍物反射,形成多个信号路径。
这些反射信号会与直达信号叠加,导致测量结果的偏差。
二、GPS测量误差的处理方法针对GPS测量误差,我们可以采取以下几种方法进行处理:1. 差分GPS测量:差分GPS测量是一种通过同时测量参考站和待测站的方式,消除大部分GPS测量误差的方法。
通过获取参考站与待测站之间的差异,可以得到相对准确的测量结果。
2. 排除异常值:在大量的GPS测量数据中,可能存在一些异常值,这些异常值可能是由于设备故障或环境因素引起的。
通过统计学方法,可以识别和排除这些异常值,提高测量数据的可靠性。
3. 数据平滑处理:由于GPS测量误差的存在,测量数据可能存在一定的波动和不稳定性。
通过对数据进行平滑处理,可以减小误差对结果的影响,得到更加平稳的测量结果。
4. 多基线处理:对于需要测量较大区域的工程,使用多个基准站进行GPS测量可以提高精度和可靠性。
通过基线向量之间的相互比较和校验,可以减小误差的累积效应。
5. 校正模型:根据GPS测量误差的特点,可以建立相应的校正模型。
通过对误差进行建模和拟合,可以对测量结果进行修正,提高准确性。
GPS测量数据处理质量评价与优化方法
一
4 4一
中国新技术新产 品
图 3编辑 窗口中剔除无效历 元后 单个
测站 卫 星 数 据 图
方差 比 值是整周未知数固定时次最优固定 解 的方差与最优 固定解的方差的 比值 ;它反映 了整周未知数可靠性的高低。 方差 比 值越大 , 说 明整周未知数可靠性越高 ; 方差比值越小 , 说明 整周未知数可靠性越差 。 1 - 3同步环 、 异步环 闭合差 同步环 、 异步环 闭合差是反 映 G S 内符 P网 合精度 的一项最重要 的指标 ,也是评价组成环 路 的所有基线是否含有粗差的重要依 据。 1 4重复基线长度检 核 重复基线是指 同一条基线边观测 了多个时 段得到 的多个基线边 。对重复基线边的长度检 核 也是评 价某条 基线 是否 含有粗 差 的重要 依 据。 2基线解算的质量评价 2 利用解类型评价 1 根据相应 的 《 全球定位系统城市测量技术 规范》 中规定 : 级别 的 G S网 , 8 同一 P 在 公里 以
1 - 2方差 比值( t ) Rai o
在 G sd软件 中, 个同步环 和异步环都 示 当时卫星信号失锁 。在数据编辑 图中选择 paj 每 然后按住 鼠标左键 拖拉框圈住 图 中 有三 个方 向 的闭合差及 边长 闭合 差 和相对 误 工具按 钮 , 差 。G S P 测量技术规程对同步环坐标分量及环 有 数据中断的地方即可剔除无效历元 ,以灰颜 线全长相对闭合差进行 了规定 ,如果达不到规 色显示 ( 如图 3。退 出数据编辑框 , ) 重新解算剔
引言
在GS P 定位数据处理 工作 中, 占用处理 时 间最长, 工作量最大 的是 G S P 基线解算。 基线解 算质量 的好坏直 接影响 到 G S网的定位 精度 P 和工作效率 。 因此正确评价基线解算的质量 , 及 时对不理想基线 进行优化处 理就显得很 重要 。 本文以 G sd软件为例 , G S paj 对 P 静态基线解算 的质量评价及优 化处理 方法进行 了探 讨 ,以供 同行参考 。 1 基线解算质量评价要素 G sd软件中,基线解算 结果有 4 paj 项质量 指标 , 即基线解 的类型 , 基线解 的方 差 比值 , 同 步环 、 异步环闭合差和重复基线长度检核。 我们 根据这些质量要素对基线解算进 行评价 。 1 . 1基线解的类 型 基线 向量 的解算质量与整 周未知数 的确 定 有直接关 系。 在软件数据处理中 , 整周未知数 是 被 当作平差计算 中的待定 参数来加以估 计和确 定 的。解算整周模 糊度 的能力 与基线的长度有 关 ,获得全部模 糊度参数 整数 解的结果 称为双 差 固定解 ,只获得双差模 糊度参 数整数解的结 果称 为双差浮点 解 , 对于较 长的基线 (0 m以 3k 上 的基线 )固定解和浮点解都不能得 到较好的 , 结果 , 可以用三差解。
基线测量与GPS观测数据处理的方法与技巧
基线测量与GPS观测数据处理的方法与技巧导言在现代测绘和地理信息系统应用中,全球定位系统(GPS)的应用越来越广泛。
而基线测量作为GPS技术的核心内容之一,对于高精度测量和位移观测具有重要意义。
本文将介绍基线测量的基本原理以及GPS观测数据的处理方法与技巧,以期为相关领域的研究和应用提供参考。
1. 基线测量的基本原理基线测量是指利用GPS技术测量两个或多个站点之间的距离,从而确定其位置和相对位移。
其基本原理是利用GPS接收机接收卫星信号,并通过计算信号的传播时间差来确定基线长度。
其中,基线测量的准确度受到多种因素的影响,如信号传播路径、大气湿度和接收机误差等。
因此,正确选择测量方法和处理技巧是保证精度的关键。
2. GPS观测数据的处理方法2.1 数据预处理在进行基线测量之前,需要进行GPS观测数据的预处理。
这包括数据采集、数据编辑和数据校正等步骤。
数据采集时,需要选择适当的接收机和天线,并确保数据采集环境稳定。
数据编辑是指对所采集的数据进行筛选和筛除异常值等处理,以减少干扰和误差。
数据校正是指对数据进行修正,包括大气改正、钟差改正和电离层改正等,以提高测量精度。
2.2 数据处理与解算数据处理是指对已校正的GPS观测数据进行处理和解算,以得到基线测量结果。
常用的数据处理方法有最小二乘法和卡尔曼滤波法。
最小二乘法是一种通过最小化残差平方和来估计未知参数的方法,适用于小型基线测量。
而卡尔曼滤波法则是通过递推和更新状态来实现参数估计,适用于大型基线测量。
此外,还可以结合差分定位技术进行数据处理,以提高测量精度。
3. 测量精度的评定与改进基线测量的精度评定是保证测量结果可靠性的重要环节。
常用的评定方法包括采用基线长度误差标准差、网平面方向余弦和基线比例差等指标来评定。
此外,还可以进行精度检验和误差分析,以查找测量结果中的突发性和系统性误差,并进行相应的改进和优化。
4. GPS观测数据处理中的技巧与应用4.1 多站观测与网络解算多站观测是指利用多个GPS观测站点进行观测和解算,以提高测量的准确度和可靠性。
GPS轨迹优化算法

GPS轨迹优化算法现代社会中,全球定位系统(GPS)已经成为我们日常生活中不可或缺的一部分。
通过GPS技术,我们能够方便地实现路径导航,找到最佳路线,提高出行效率。
然而,由于众多因素的影响,GPS定位数据可能存在一些误差。
为了提高路径规划的准确性和效率,有必要对GPS轨迹进行优化分析。
本文将介绍GPS轨迹优化算法的基本原理和应用。
在降低定位误差方面,可以采取以下几种方式。
首先,通过增加接收设备的天线数量或者采用高精度的天线来提高接收机灵敏度,以增加接收到的卫星信号强度。
其次,可以通过差分定位技术,利用接收到的参考信号进行误差校正,提高定位的准确性和精度。
另外,可以利用地面参考站对GPS数据进行后处理,进一步提高定位的精度和稳定性。
在路径规划优化方面,可以采取以下几种算法。
首先,可以采用最小生成树算法,通过计算各个GPS点之间的距离和权重,得到一个最优路径,使得路径长度最小。
其次,可以利用遗传算法,通过模拟生物进化过程,不断优化路径并找到最佳解。
此外,还可以通过动态规划算法,将路径规划问题转化为最优子结构的问题,通过递推求解最优路径。
最后,还可以利用模拟退火算法,通过模拟金属退火过程,不断调整路径,以达到最优解。
GPS轨迹优化算法的应用非常广泛。
在交通领域中,可以利用GPS轨迹优化算法,对城市道路进行拥堵分析和优化,提高交通效率。
在物流领域中,可以利用GPS轨迹优化算法,对货物的配送路径进行优化,提高物流效益。
在旅游领域中,可以利用GPS轨迹优化算法,规划最佳旅游路线和景点参观顺序,提高旅行体验。
综上所述,GPS轨迹优化算法在路径规划和定位精度方面起着重要作用。
通过降低定位误差和优化路径规划,我们可以提高出行的效率和准确性。
随着技术的不断发展,GPS轨迹优化算法将进一步完善和应用到更多的领域中,为人们的出行和生活带来更多的便利和舒适。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GPS 基线处理的优化技术提要本文阐述了GPS 基线处理的几种优化技术,并对影响基线解算的各种技术参数进行了分析探索。
关键词基线处理;整周模糊度;基线解;可靠性GPS 数据处理原理比较复杂,但自动化程度高。
GPS 的定位精度一般与网的布设、已知点的选取、观测方法、基线处理和网平差有关,而基线处理是GPS 数据处理的最重要的一步。
在实际基线向量处理时,既要顾及观测时段中由于信号中断或其它原因引起的周跳的修复;劣质数据的发现和剔除;星座变化引起的整周模糊度N 的增加等问题,还应考虑如何消除偏差影响,如对电离层模型参数和对流层改正数的残余误差进行估计校正,或对接收机时钟特征值进行重新评估。
因此,GPS 基线向量处理程序是一个庞大的软件系统,尽管自动化程度较高,但系统一般设置了许多人工干预的接口,通过设置各种参数可以对基线进行优化。
1 卫星高度角的设置卫星高度角的截取对于数据观测和基线处理都非常重要,观测较低仰角的卫星有时会因为卫星信号强度太弱、信噪比较低而导致信号失锁,或者因为信号在传输路径上受到较大的大气折射影响导致整周模糊度搜索的失败。
但选择较大的卫星高度角可能出现观测卫星数的不足,或卫星图形强度欠佳,因此同样不能解算出最佳基线。
高度角的缺省设置为15 度。
如果同步观测卫星数太少或者同步观测时间不足,对于短基线来说,可以适当降低高度角后重新进行试算,可能会得到满足要求的基线结果,此时应注意,测站数据要稳定,且环视和气象条件要好,解算后的基线应进行外部检核(如同步环和异步环检核) 以保证其正确性。
如果用缺省设置值解算基线失败,而连续观测时间较长,观测的卫星数较多、图形强度因子GDOP 值较小,则适当提高卫星的高度角重新解算可能会得到较好的基线结果,这是因为测站环境和大气层对低仰角的卫星信号产生较严重的多路径和时间延迟所引起的。
2 电离层折射改正电离层高度位于50km 以上的大气层,由于太阳紫外线的辐射,电离层中存在着大量的自由电子和正离子,使得大气折射率n 小于1 。
当电磁波信号穿过电离层时,信号的路径会发生弯曲,同时传播速度也会发生变化,传播速度的变化较为显著,必须加以改正,一般,对定位的影响天顶方向最大可达50m , 地平方向可达150m。
电离层折射影响与电离层中的电子浓度成正比,电子数越多,对定位的影响越大。
而电离层中的电子数与白天黑夜、太阳黑子活动频繁程度、一年中季节的变化以及测站的位置有关。
通常,夜间电子浓度比白天小3 倍;太阳活动激烈的年份是平稳年份的4 倍;低纬度地区是高纬度地区的5 —8 倍,因此适当选择观测时间可以减小电离层影响,从而有利于基线的解算。
在GPS 作业中,由于电离层折射影响与电磁波频率成反比,因而高频率的GPS 信号可削弱电离层的影响,另外,双频观测也可以消除一阶电离层的影响。
当基线较短时,可以认为信号到达两天线所经过的电离层路径是相同的,因此可以用站间双差法来抵消电离层折射的影响。
对于较长基线来说,双差后仍存在残余误差,因此当基线超过30 —40km 时,对于单频机来说,可能无法确定整周未知数而不能正确解算基线。
尽管经过各种改正, 一般仍存在3ppm 的残余误差,为了提高基线的精度,必须利用模型进行改正。
系统通常提供了三种模型选择: ①标准模型(Standardmodel) ; ②计算模型(Computed model) ; ③无电离层模型(None) 。
所谓标准模型就是单层模型,即假设所有的电子全部分布在某一高度的一个薄层上,然后根据这个模型计算出每一颗卫星的每一个历元观测值的电离层延迟。
该模型是卫星传送的“标准”模型,通常与观测时电离层的实际状态不完全相符。
如果在某时段连续观测了一个小时以上,则可以先计算出当地电离层模型,系统将根据观测值导出一个实际的改正数模型,并将它应用于每颗卫星每个历元的电离层延迟改正数计算,这就是所谓的计算模型。
在静态定位中,观测时间一般多于一个小时,可选用计算模型,这样将模拟电离层的实际状态进行改正,有利于提高基线解算精度。
对于快速静态或动态定位,观测时间较短,选择标准模型也会得到最佳基线结果。
采用无电离层模型,可能会有约7ppm 的系统偏差,此项选择仅用来分析研究电离层折射的影响。
3 对流层折射改正对流层的高度为40km 以下的大气层,由于它接近地面,大气层密度较大,而且密度大小和厚度随地面的气侯、位置的变化而变化,因此,与电离层的影响比较,其机制要复杂得多。
对流层的折射率n 通常大于1 ,因而当GPS 信号通过对流层时,其传播速度和路径将会发生变化。
一般天顶方向的延迟值为2 - 3m ,当天顶距大于80 度时,延迟值将增加至十几米。
这种延迟值是大气层的气压、温度、折射率和测站高度的函数,它不能利用双频观测进行改正,只能采用测站周围的气压、温度及湿度等气象参数用模型进行改正。
但是,基线较短且两测站的高差较小,可认为所受到的对流层折射影响相同,则用站间双差法基本上可抵消对流层的影响。
用于对流层改正的模型比较多,常用的模型有: ①萨斯塔莫宁模型( Saastamoinen) ; ②霍普费尔特模型(Hopfield) ; ③经过改进的霍普费尔特模(modified2Hopfield) ; ④戈得—古德曼模型( Goad - Goodman) ; ⑤勃兰克模型(Black) ; ⑥无对流层模(None) 。
各种模型的原理均是基于地面量测的气象元素用试验模型来推估逼近对流层的实际情况,各种模型的计算结果差别很小,彼此只相差几个mm。
系统的缺省模型一般为霍普费尔特模型,用户可选择其它模型或自已严密推导的专用模型,但同一测区的基线应采用相同的模型。
用于模型改正的气象元素一般要实测,当没有实测的气象元素输入时,系统会自动采用标准的地面气象模型进行改正。
对于是10km 以内的短基线,标准气象模型与实测的气象数据进行改正的差值仅为几mm。
但对于长度较长、测站高差较大或测站间的气象元素有明显差别的基线,则应输入实测的气象观测值,这样有利于对流层的改正。
因此在组成观测基线时,应选择距离较近、高差较小及环境相同的两测站组成基线,将有利于基线解算。
如何确定对流层模型,根据经验可遵循下面准则;基线长小于500m 时,可不加改正或使用标准改正;基线在500m 至2km 之间,可使用标准改正或用实测的气象元素改正;基线长在2km 以上,应使用实测的气象元素改正。
4 卫星星历的选择卫星星历误差、电离层折射误差以及对流层折射误差是GPS 测量的三大主要误差来源。
卫星星历类型分为广播星历和精密星历,普通用户只能获得广播星历,它是一种外推预报星历,是导航或实时定位不可缺少的数据。
对静态用户来说,广播星历基本上能满足需要,但自从美国实施SA 技术以来,人为地增加了广播星历的误差,尽管相对定位用户可利用双差法克服星历误差的影响,但仍使基线解算的精度和可靠性变差。
对事后数据处理的用户,如果定位精度要求较高,则可使用精密星历。
精密星历是一种实测星历,它可通过网络或通讯方法从国家测绘主管部门获得。
精密星历按数据格式可分为SP3 和EP18 两种类型,SP3 文件是最常用的ASCII 格式,它主要包含了卫星的位置数据和卫星的钟差数据,EP18 文件是SP3 格式的简略形式,数据量较小,便于贮存和携带。
对于长基线(长度上百公里) 的用户,使用精密星历可使定位精度提高几个数量级。
5 观测数据的组合GPS 观测值可分为L1/ L2 伪距和L1/ L2 载波相位。
伪距又分为P 码和C/ A 码。
相对定位用户基线解算时,一般同时选择伪距和相位观测值,单点定位用户一般只选择伪距观测值。
双频用户在解算基线时,系统一般能自动实施最有利的组合方式,也可以进行人工组合,选择使用L1 、L2 、L1 + L2、L1 - L2 或其它组合方式。
6 基线解类型的设定在短基线上最易求得整周模糊度的整数值,因而从理论上讲,基线解算的结果应以双差固定解为最优,但对于大于20km 的长基线,由于大气残差的影响,仍搜索初始整周模糊度的整数解对提高基线的精度没有多大的意义。
系统可直接指定基线解算的类型(双差固定解和双差浮点解) 或设定解算整周未知数基线长度的最大值,作者认为,如果观测期间星座变化频繁、大气抖动严重或存在未修复的周跳等因素,基线以双差固定解输出并非最佳结果,此时可直接指定解的类型为双差浮点解或减小解算整周未知数基线的长度。
这种情况应注意,应采用同步环和异步环检核方法检核基线结果的正确性。
7 先验标准差限差的规定先验误差的标准差是相位观测值噪声的限值,系统的缺省值一般为10mm。
观测值噪声是由于测站运动、电离层折射和多路径影响等外部原因造成的。
用含有较大噪声的观测值搜索整周模糊度,将使整周模糊度的解不可靠。
因此为了提高整周模糊度解的可靠性,可适当减少先验标准差的限差值。
但解算长基线时,可适当增加该限值,有利于成功搜索整周模糊度的解,此时,应采取必要的外部手段(如检核不同时段的重复观测值互差) 检核基线成果的可靠性。
8 周跳修复周跳修复比较复杂,一般由系统自动完成,但系统为用户提供了周跳修复方式,一般有三种: ①利用失锁标志及相位观测值检测; ②仅靠失锁标志检测; ③仅靠相位观测值检测。
用户通常选择利用失锁标志及相位观测值检测方法,因为它顾及天线在观测中记录的失锁信息,同时也考虑了由相位观测值连续性特性而检测出的周跳。
在准动态测量中,由于使用快测杆不能保证天线的绝对稳定,过大的观测噪声可能视为信号失锁,此时选择仅靠失锁标志检测可获得基线解算的成功。
如果采样率没有选择采用全部观测值,部分失锁标志将不能被检测到,此时应选择仅靠相位检测法。
周跳修复的最大值是指设定信号中断的最大区间,间断区间越大,采样密度越稀疏,精确恢复整周计数就越困难,即便修复,也有可能引入了±0. 5 至±1周的偏差,短区间的采样可使修复的整周计数十分可靠。
一般该值多设为5min ,超过此值将不再修复,而是引入新的初始整周模糊度,将中断区间后数据作为另一观测时段进行处理。
9 双差残差分析基线解算后,如果部分基线没有固定解或者基线的精度因子Ratio 值较小、精度较差,大多数是由于跟踪的卫星中存在个别信号太差的卫星或者有可能是观测中某一时间段内的数据质量太差。
为了进一步详细了解观测数据的质量,可以调阅基线解算后生成的双差残差文件或双差残差曲线进行分析。
通常,最常用的、最直观的是进行双差残差曲线分析。
除参考卫星外,观测到的卫星均有一条双差残差曲线。
若残差曲线平直或几乎平直,则说明对应的卫星数据质量较好;若残差曲线为倾斜线、或多条间断的倾斜线、或振幅较大的波状曲线、或多条间断的波状曲线,则说明该卫星的数据较差,应该删除该卫星,重新进行基线解算;若所有的残差曲线形状相同且表现的卫星的数据较差,则说明参考卫星的数据有问题,应该重新选择参考卫星或删除该参考星;若残差曲线表明在开机或关机的时候某一部分时间的数据太差,且整个观测时段较长,则可舍去质量差的时间段的数据,截取中间质量较好的数据重新进行基线解算。