基于RS485总线的PC机与多单片机系统的串行通信
利用RS-485通讯协议实现PC机与单片机的多点通讯
合肥学院毕业设计(论文)任务书课题类型:工程设计类,实验研究类,计算机软件设计类,电路设计类,其它类课题来源:科研,教研,预研,生产实践,其它类系主任教研室主任指导教师年月日年月日2007年11月1日利用RS-485通讯协议实现PC机与单片机的多点通讯摘要介绍一种RS-485接口芯片MAX485,利用此芯片可以很方便地实现PC机与单片机之间的串行通讯,同时给出PC机与单片机实现多点通讯的实例。
关键词 RS-485串行通讯多点通讯随着数据采集系统的广泛应用,通常由单片机构成的应用系统,如仪器仪表、智能设备等,都需要与PC机之间交换数据,实现与PC机之间的通讯功能,以充分发挥PC和单片机之间的功能互补,资源共享的优势。
以往常用的RS-232协议在很大程度上已不能满足设计的要求,如传输速率慢,传输距离短,传输信号易受外界的干扰等缺点。
本文介绍一种性能优越的RS-485接口芯片,以及如何利用此芯片实现单片机与PC机之间的远程通讯,并讨论将其功能进行扩充,实现PC机管理单片机阵列的功能。
1 RS-485协议简介及MAX485芯片介绍由于RS-232的种种缺点,新的串行通讯接口标准RS-449被制定出来,与之相对应的是RS-485的电气标准。
RS-485是美国电气工业联合会(EIA)制定的利用平衡双绞线作传输线的多点通讯标准。
它采用差分信号进行传输;最大传输距离可以达到1.2 km;最大可连接32个驱动器和收发器;接收器最小灵敏度可达±200 mV;最大传输速率可达2.5 Mb/s。
由此可见,RS-485协议正是针对远距离、高灵敏度、多点通讯制定的标准。
MAX485接口芯片是Maxim公司的一种RS-485芯片。
采用单一电源+5 V工作,额定电流为300 μA,采用半双工通讯方式。
它完成将TTL电平转换为RS-485电平的功能。
其引脚结构图如图1所示。
从图中可以看出,MAX485芯片的结构和引脚都非常简单,内部含有一个驱动器和接收器。
基于485总线的PC机与多片单片机的通信毕业设计说明书
武汉工程大学邮电与信息工程学院毕业设计(论文)说明书论文题目 PC机与多台单片机之间的串行通信目录摘要 (Ⅱ)Abstract (Ⅲ)第一章绪论 (1)第二章课题实施方案 (2)第三章硬件电路设计 (5)3.1 80C51单片机结构及其串行通信原理 (5)3.2 串行接口及其差分转换电路 (17)3.3 Protel DXP 2004原理图设计 (20)第四章软件电路设计 (29)4.1 系统的通信协议 (29)4.2 C51编程实现PC机与单片机之间的串行通信 (29)4.3 Windows集成开发环境uVision2 (33)总结 (39)致谢 (41)参考文献 (42)摘要本文详细介绍了基于RS-485总线的PC机与多台单片机间的串行通信原理、实现方法和相应的通信硬件、软件设计。
该设计是由PC机与单片机组成的主从控制系统,其中PC机做为上位机对下位单片机是实现控制和监视功能。
它包括通信和控制两个功能模块。
单片机作为下位机在整个系统中属于从属地位,主要用来接收上位机的命令。
由于此通信的PC接口是RS232的9针接口,且下位机数目有限(32台)。
所以本设计采用了RS485总线以及RS232转RS485的协议芯片以满足长距离多机通信,本文讨论了总线接口转换、主从式通信协议设计方法,给出了采用中断式处理的通信过程流程图,并叙述了设计过程中必备的绘图软件Protel DXP的应用,以及编辑源代码软件keil uVision2的应用,实现了PC机对多个单片机组成采集终端的通信与管理。
关键词:PC机单片机RS-485 通信AbstractThe communication 、realized method and corresponding design of hardware and software between PC and multiple MCUs based on RS-485 is described in detai in the article. This design instroduces a pincipal and subordinate control system which is composed of PC and single chip. Divided from its function, it includes two parts: communication and control, in which PC is used as master, and MCUs is used as slave so as to receive the single order from the master.The bus interface conversion and the design of master-slave communication protocol is introduced and The program flowchart of communication with interrupt process is also given. In the process of design, the use of unnecessary painter software and code editor software is depicted so that realize the communication and administration between PC and multiple MCUs which composed collection terminal.Keywords: PC MCUs RS-485 communication第一章绪论单片机由于其具有控制功能强、设计灵活和性能价格比高的特点。
PC机与多单片机串行通信程序设计

PC机与多单片机串行通信程序设计
孙媛;王水清;杜成涛
【期刊名称】《微处理机》
【年(卷),期】2003(000)002
【摘要】以智能小区抄表与报警系统为例,介绍了PC机与多单片机串行通信的软件设计方法,简单实用,能满足一般分布式控制系统的需要.
【总页数】3页(P39-40,55)
【作者】孙媛;王水清;杜成涛
【作者单位】江南大学通信与控制工程学院,无锡,214036;江南大学通信与控制工程学院,无锡,214036;江南大学通信与控制工程学院,无锡,214036
【正文语种】中文
【中图分类】TN91
【相关文献】
1.基于MSComm的PC机与单片机串行通信程序设计 [J], 邱育桥
2.基于VB的PC机与单片机串行通信程序设计 [J], 汤勃;徐立伟;饶润生
3.基于VB的单片机与PC机串行通信程序设计 [J], 罗红萍;彭云柯
4.实现32位单片机MC68332与PC机串行通信的底层程序设计 [J], 钟军;冯静;卓斌
5.专用单片机SH58216与PC机串行通信底层程序设计 [J], 叶建芳
因版权原因,仅展示原文概要,查看原文内容请购买。
基于RS485的PC与ARM间文件传输的实现

基于RS485的PC与ARM间文件传输的实现
钟汉如;叶家威
【期刊名称】《微计算机信息》
【年(卷),期】2008(0)5
【摘要】本文介绍了一种基于RS485的PC与ARM之间文件传输的实现方案.给出了RS485驱动程序的设计方法,详细阐述了自定义通信协议和实现程序.
【总页数】2页(P119-120)
【作者】钟汉如;叶家威
【作者单位】510641,广州市,华南理工大学工业装备与控制工程学院;510641,广州市,华南理工大学工业装备与控制工程学院
【正文语种】中文
【中图分类】TP273+.5
【相关文献】
1.基于OpenSSH实现Windows与Linux平台间的安全文件传输 [J], 文自勇;廖亮
2.基于RS485的IBM-PC机间的串行通信技术 [J], 廖仕利;陈渝光;万文略
3.基于RS485实现的PC机与单片机多机通信 [J], 刘志群
4.PC与TMS320C54x基于RS485的异步串行通信的实现 [J], 孙万川;张蕴玉
5.基于 PC 机和 AVR 单片机的 RS485 通信系统的设计与实现 [J], 李永;李芙玲;贺秀玲
因版权原因,仅展示原文概要,查看原文内容请购买。
利用MAX485实现PC机与单片机之间的串行通讯
利用MAX485实现PC机与单片机之间的串行通讯摘要介绍一种RS-485接口芯片MAX485,利用此芯片可以很方便地实现PC机与单片机之间的串行通讯,同时给出PC机与单片机实现多点通讯的实例。
关键词RS-485串行通讯多点通讯随着数据采集系统的广泛应用,通常由单片机构成的应用系统,如仪器仪表、智能设备等,都需要与PC机之间交换数据,实现与PC机之间的通讯功能,以充分发挥PC和单片机之间的功能互补,资源共享的优势。
以往常用的RS-232协议在很大程度上已不能满足设计的要求,如传输速率慢,传输距离短,传输信号易受外界的干扰等缺点。
本文介绍一种性能优越的RS-485接口芯片,以及如何利用此芯片实现单片机与PC机之间的远程通讯,并讨论将其功能进行扩充,实现PC机管理单片机阵列的功能。
1 RS-485协议简介及MAX485芯片介绍由于RS-232的种种缺点,新的串行通讯接口标准RS-449被制定出来,与之相对应的是RS-485的电气标准。
RS-485是美国电气工业联合会(EIA)制定的利用平衡双绞线作传输线的多点通讯标准。
它采用差分信号进行传输;最大传输距离可以达到1.2 km;最大可连接32个驱动器和收发器;接收器最小灵敏度可达±200 mV;最大传输速率可达2.5 Mb/s。
由此可见,RS -485协议正是针对远距离、高灵敏度、多点通讯制定的标准。
MAX485接口芯片是Maxim公司的一种RS-485芯片。
采用单一电源+5 V工作,额定电流为300 μA,采用半双工通讯方式。
它完成将TTL电平与RS-485电平转换的功能。
其引脚结构图如图1所示。
从图中可以看出,MAX485芯片的结构和引脚都非常简单,内部含有一个驱动器和接收器。
RO和DI端分别为接收器的输出和驱动器的输入端,与单片机连接时只需分别与单片机的RXD 和TXD相连即可;/RE和DE端分别为接收和发送的使能端,当/RE为逻辑0时,器件处于接收状态;当DE为逻辑1时,器件处于发送状态,因为MAX485工作在半双工状态,所以只需用单片机的一个管脚控制这两个引脚即可;A端和B端分别为接收和发送的差分信号端,当A引脚的电平高于B 时,代表发送的数据为1;当A的电平低于B端时,代表发送的数据为0。
分布式控制系统中PC机与多个智能控制器数据通信的实现

分布式控制系统中PC 机与多个智能控制器数据通信的实现The Realization of Data Co mmunication between Single PC and Multiple Intelligent Controllers in Distributed Control Syste m白建波 张小松(东南大学动力工程系,南京 210096)摘 要 阐述了DB1000智能控制器的通信协议以及主从式通信的原理,采用Pcomm 串行通信开发工具实现了分布式控制系统中单台PC 机对多台智能控制器的串行通信控制。
关键词 分布式控制系统 串行通信 智能控制器 Pcomm Abstracts The communication protocol of the DB1000intelligent controller and the principle of master 2slave communication are introduced.Pcomm ,a serial communication development tool is used to control serial communication between a single PC and multiple intelligent controllers in a distributed control system.K eyw ords Distributed control system Serial communication Intelligent controller Pcomm0 引言随着计算机技术、自动控制技术以及通信技术的发展,在工业自动化领域出现了大量的智能化的仪器和仪表,其中智能控制器就是利用微机技术实现的一种可编程控制单元。
它一般都具有高性能、高可靠性、优良的通信能力和宽广的过程信号适应能力等特点。
具有串行通信功能的智能控制器与PC 机组成的小型分布式控制系统构建方便、可扩展性好、简单可靠,在工业控制领域得到广泛应用。
应用RS_485的PC与单片机通信研究
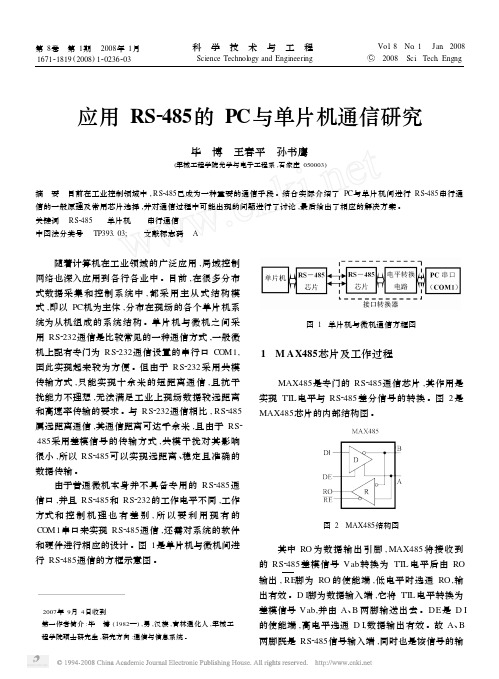
第8卷 第1期 2008年1月167121819(2008)120236203 科 学 技 术 与 工 程Science Technol ogy and Engineering Vol .8 No .1 Jan .2008Ζ 2008 Sci .Tech .Engng .应用RS 2485的PC 与单片机通信研究毕 博 王春平 孙书鹰(军械工程学院光学与电子工程系,石家庄050003)摘 要 目前在工业控制领域中,RS 2485已成为一种重要的通信手段。
结合实际介绍了PC 与单片机间进行RS 2485串行通信的一般原理及常用芯片选择,并对通信过程中可能出现的问题进行了讨论,最后给出了相应的解决方案。
关键词 RS 2485 单片机 串行通信中图法分类号 TP393.03; 文献标志码 A2007年9月4日收到第一作者简介:毕 博(1982—),男,汉族,吉林通化人,军械工程学院硕士研究生,研究方向:通信与信息系统。
随着计算机在工业领域的广泛应用,局域控制网络也深入应用到各行各业中。
目前,在很多分布式数据采集和控制系统中,都采用主从式结构模式,即以PC 机为主体,分布在现场的各个单片机系统为从机组成的系统结构。
单片机与微机之间采用RS 2232通信是比较常见的一种通信方式,一般微机上配有专门为RS 2232通信设置的串行口COM1,因此实现起来较为方便。
但由于RS 2232采用共模传输方式,只能实现十余米的短距离通信,且抗干扰能力不理想,无法满足工业上现场数据较远距离和高速率传输的要求。
与RS 2232通信相比,RS 2485属远距离通信,其通信距离可达千余米,且由于RS 2485采用差模信号的传输方式,共模干扰对其影响很小,所以RS 2485可以实现远距离、稳定且准确的数据传输。
由于普通微机本身并不具备专用的RS 2485通信口,并且RS 2485和RS 2232的工作电平不同,工作方式和控制机理也有差别,所以要利用现有的COM1串口来实现RS 2485通信,还需对系统的软件和硬件进行相应的设计。
基于RS485总线的PC与多个单片机通信的C语言程序
PC方面:可以用MSCOMM控件先发一个字符表示接收地址,后延迟1ms,(注意PC端在485通讯在字符发送过程中一定要加延迟,这是我多次测试的总结,如果是用调试助手的话,他内部代码已经加过延迟了,就不必考虑这个问题)再发控制指令,初学者建议直接用调试助手
单片机方面:首先对接收数据进行核对,如果不是本地地址,放弃,如果是本地地址,在检测命令是否正确,如果正确,做出处理后返回PC本地地址并发送命令
{
while(RI==0);
RI=0;
if(SBUF==0x01) //发送指令
{
MAX485_DIR=1; //开发送
SBUF=AddressID;
while(TI==0);
TI=0;
SBUF=0x6f; //发送o
while(TI==0);
TI=0;
SBUF=0x6b; //发送k
MAX485_DIR=0; //开接收
sbit MAX485_DIR=P3^7;
main()
{
//****************通讯设置
SCON = 0xF0; //REN=1允许串行接受状态,串口工作模式3,SM2=1
TMOD|= 0x20; //定时器工作方式2
PCON|= 0x80; //波特率提高一倍
IP=0x10; //串口优先级高
}
if(SBUF==0x00) //收
{
//这里怎么处理就看你自己要怎么做了,你没要求,我也不好怎么写,就自己写吧
}
}
}
程序调试通过,可以直接套用
//TH1 = 0xFD; //baud*2 /* reload value 19200、数据位8、停止位1。效验位无(11.0592)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4 结束语运用形态学基本运算(膨胀、腐蚀)及其联合运算(开、闭)不需额外增加专门的去噪运算,在运用开、闭运算修整工件时只要选用比噪声大的结构元素即可去除噪声。
修整工件时,只要选择合适的结构元素,即可去除突刺、填补缺陷,从而达到平滑轮廓、快速识别工件的目的。
而进行边缘检测时,只需对工件进行膨胀(或腐蚀)处理后与原图片相减即可得到边缘轮廓线。
综上所述,运用形态学运算进行工件识别预处理,其算法简单、易于实现,提高了整体识别速度。
参考文献:[1] 吴敏金.图像形态学[M ].上海:上海科学技术文献出版社,1991.[2] 飞思科技产品研发中心.Matlab6.5辅助图像处理[M ].北京:电子工业出版社,2003.[3] 谢根全.工件表面质量缺陷的计算机自动识别[J ].机械与电子,2001,(4):51-52.[4] 姚 远,王广雄,张田文.基于模糊细胞神经网络的彩色图像形态学重构[J ].计算机学报,1999,22(7):727-732.[5] 李 林,高 政.一种新颖的灰度形态学算子[J ].计算机辅助设计与图形学学报,2001,13(9):820-823.[6] 王家文,曹 宇.Matlab6.5图形图像处理[M ].北京:国防工业出版社,2004.作者简介:张金萍 (1977-),女,河南尉氏人,东北大学机械工程与自动化学院博士研究生,研究方向为机电一体化;刘 杰 (1944-),男,辽宁昌图人,东北大学机械工程与自动化学院教授,博士研究生导师,研究方向为振动利用与控制、机电一体化。
基于RS485总线的PC 机与多单片机系统的串行通信林 颖,罗金炎,刘 骄,陈 忠,李伟光(华南理工大学,广东广州510640)Serial Communication Based on RS485Bus between PC and Multisinglechip SystemL IN Ying ,L U O Jinyan ,L IU Jiao ,CHEN Zhong ,L I Wei gu ang(South China University of Technology ,Guangzhou 510640,China ) 摘要:根据所开发的电子产品故障维修实验系统的要求,提出了一套基于RS485总线的PC 机与多单片机系统间的串行通信协议,已成功应用于故障维修实验系统中。
关键词:RS485总线;多单片机;串行通信中图分类号:TP336文献标识码:A文章编号:10012257(2006)01003304收稿日期:20050902基金项目:广东省科技攻关项目(2003C102017)Abstract :According to t he f unctional request of a fault maintenance experiment system for elec 2t ronical p roduct s ,p ut s forward a communication p rotocol which is designed for serial communica 2tion based on RS485bus between PC and multi singlechip system.This p rotocol has been imple 2mented in t he above experiment system.K ey w ords :RS485bus ;multi singlechip ;seri 2al co mmunication0 引言笔者参与合作开发了一个电子产品故障维修实验系统。
利用该实验系统,可以避免传统维修训练中必须进行实物拆装的缺陷。
在这个实验系统应用过程中,首先,上位机可根据教学需要生成各种难度级别的实验题目并发送给进行实验的下位机,下位机通过L CD 显示接收到的实验题目,并同步接收上位机根据实验题目生成的相应的嵌入式控制器的控制参数。
然后,下位机根据接收到的控制参数改变进行维修的电器中的嵌入式控制器的通断状态,使电器电路动态地产生故障,模拟实验环境。
1 通信系统的硬件设计RS485是一个多引出线接口,这种接口可以有多个驱动器和接收器,可以实现一台PC 与多台单片机间的串行通信,而且其通信距离可达1000m 以上,适合远距离传输。
因此采用RS485总线建立PC 与多单片机的传输网络是可行的[1]。
系统硬件部分主要包括2部分:上位机端和下位机端。
上位机即为实验室主控PC 机,操作系统为Windows2000;下位机在默认情况下为30个单片机实验终端,每个终端由主机和从机2个A T89S52单片机以及键盘、液晶显示器及嵌入式控制器等设备组成。
下位机中,主机负责和主控PC 机通讯,从机则根据从主机收到的控制参数控制嵌入式控制器,根据实验需要可模拟电子故障的发生和消除。
上位机和下位机的连接利用PC 机主机自有的RS232接口,采用S2485转换芯片和RS485总线连接组成通信网络[2]。
硬件连接如图1所示。
图1 系统硬件连接在该系统中,由于采用MA X487差分平衡收发器芯片,半双工传输方式,因此驱动器可接的下位机根据需要最多可扩展至128个。
2 通信协议的设计2.1 PC 机与多单片机的多机通信原理上位机的信息可以传送到各个下位机或指定的下位机,下位机发送的信息只能为上位机所接收,各下位机之间不能直接通信。
为了实现主控PC 机与多单片机的通信,首先要为每一下位机的地址编码,用一个字节定义。
系统中,下位机主机A T89S52单片机对串口的控制通过SCON 控制寄存器实现,SCON 各位定义如图2所示。
图2 SCON 各位定义SM0,SM1为串口工作方式选择位,SM2为多机通信控制位,REN 为允许串行通信选择位,下位机系统由初试化程序将串口设置成工作方式2或3,SM2=1,REN =1,下位机处于接收状态。
TB8为方式2、3中发送数据第9位,RB8为方式2、3中接收数据第9位,TI 为发送中断标志位,RI 为接收中断标志位。
系统巧妙地利用下位机SCON 中的多机通信控制位SM2来协调PC 与单片机的多机通信。
如前文所述,各下位机通过初始化程序使得SM2=1。
当上位机要和某一下位机通信时,将以广播方式向所有下位机发送该下位机的地址帧(第9位被置1),所有下位机在收到上位机的地址帧后,自动将第9数据位状态“1”送到各自的SCON 中的接收数据第9位,使RB8=1,表示下位机此时收到的是地址信息,由于SM2=1,激发中断标志位RI =1,使下位机将上位机送来的地址和本机地址相比较。
如果地址不符,则保持SM2=1,对上位机以后发出的数据帧(RB8=0)不予响应,不再激发中断标志RI =0,下位机继续等待呼叫。
如果下位机的本机地址和接收的地址相符则置SM =0,同时上位机建立与该下位机的通信信道,相应的下位机转入与主机点对点通信状态,此时不论RB8为0或为1,下位机都能激发RI =1,响应上位机的指令。
系统正是通过对各下位机SM2和RB8的状态的控制实现了上位机与下位机通信的有效管理。
相应地,PC 机和下位机的单片机通信,则PC 机串口信息帧格式必须和A T89S52的信息帧格式相同。
A T89S52多机通信信息帧格式如图3所示。
图3 A T89S52多机通信信息帧格式第9位为下位机SCON 中的TB8,是多机通信时下位机发送地址/数据的标志。
而PC 机的串行通信接口芯片为异步通信适配器INS8250UA R T ,其可接收和发送11位数据,格式如图4所示。
图4 数据格式比较A T89S52的信息帧格式和INS8250收发数据的格式可知:它们的数据长度相同,不同的仅在于奇偶校验位和位TB8。
如果通过软件方法编程控制8250的奇偶校验位,使得在发送地址时为“1”,发送数据时为“0”,则8250的奇偶校验位可模拟单片机多机通信的TB8位。
作者使用VC610作为系统上位机软件开发工具,通过对设备控制块DCB (device cont rol block )中成员变量Parity 的设置,可以把串口所发送数据的数据帧的奇偶校验位都置为1即Parity =MA R KPA RIT Y ,或者都置为0即Parity =SPACEPARIT Y ,从而实现多机通信。
2.2 通信协议a.通信波特率为9600bit/s ,晶振为12M Hz ,通信的数据格式如前所述,共11位:1位启动位,8位数据位(低位在前),1位可控的第9位和1位停止位。
下位机的地址用1个字节定义,用16进制表示,如1号机地址为01,10号机地址为0A 。
约定上位机的地址为00,系统广播地址为FF 。
b.上位机监控程序运行时,上位机开始以时间间隔Δt 对下位机进行轮询以查验下位机的状态,依次向下位机发送查询指令。
上位机的查询指令格式和下位机的回复查询指令格式分别如图5所示。
图5 指令格式XX 为轮询到的下位机地址,01为上位机查询指令;00为上位机地址,02为下位机回复查询指令。
对轮询到的下位机,上位机根据下位机回复查询指令查询其状态字,判断其是否有通讯请求,如果没有,就对该下位机发出通讯授权标志,若在预定的时间内有应答,则上位机建立与该下位机的通信信道;若在预定的时间内下位机无应答,则置该下位机不在线标志,然后轮询下一位置的下位机,如此反复。
c.上位机与下位机建立通信信道,上位机按照上位机指令优先的原则下,根据下位机的状态字和上位机的状态字,向下位机发出准备接受信息指令。
下位机的动作包括登陆、提交实验信息;上位机的动作有发送实验题目、开始实验、中断实验、恢复实验及查询下位机的实验状况等,在通信协议中都将这些动作进行通讯标志编码,如上位机查询下位机状态指令通讯标志编码为01,开始实验指令编码为0A ,下位机登陆指令编码为04。
上位机发出的指令格式如图6所示。
图6 指令格式XX 为与上位机通讯的下位机的地址,YY 为上位机功能指令。
特别地,上位机发送开始实验指令时,XX 可以是下位机地址,也可以是系统的广播地址FF 。
当XX 为FF 时,用于向所有实验终端统一发送开始指令。
当YY 为0A ,表示系统中所有的下位机能够同步接收上位机发送的开考指令。
数据域是否存在和上位机的功能指令类型有关,如当上位机功能指令为发送实验题目指令时,数据域的内容即为要发送的相关内容;当功能指令为开始实验指令时,数据域为空。
在通信过程中,当在一个预定的时间内,上位机没有向下位机发送指令(上位机优先原则失效),这时下位机可向上位机发送指令,下位机发出的指令格式如下如图7所示。
图7 指令格式00为上位机的地址,YY 为下位机功能指令,根据YY 的不同,数据域的内容也是不同的,如在下位机请求登陆时,YY 为04,数据域为学生姓名、学号。