A closed-loop temperature control system
高精度追踪与活动平台-摄像头W Fu, L Gao说明书

High Accuracy Tracking with an Active Pan-Tilt-Zoom CameraW. Fu, L. GaoSchool of Electronics and Information EngineeringXi’an Technological UniversityXi’an, ChinaAbstract—Traditional PTZ tracking system focus on tracking algorithm, but PTZ camera control is not taken seriously and the control method has the large deviations. The algorithm for PTZ camera control is defined according to the target position which is achieved by the tracking algorithm in the image, calculates the rotation angles of the two motors to control the PTZ camera. As a result, the target appears in the centre of the image. This paper proposes a model-based algorithm for PTZ camera control, taking into account the camera distortion and the deviation is within 5 pixels. Experimental results show that the algorithm can be effectively applied to PTZ tracking system.Keywords-PTZ camera control; tracking algorithm; camera calibrationI.I NTR ODUC TIONPTZ(Pan, Tilt and Zoom) tracking mainly means that the PTZ cameras is under the automatic control for tracking of moving objects of visual guide to ensure tracking target always appearing in the center of the lens in the range of the camera monitoring scene. In the video surveillance, the distance of the target from the camera is generally 10 meters or more. If the object is a pedestrian, the characteristics of the pedestrian cannot be seen clearly since the image is low quality. In this case, we can manually zoom in the camera to obtain the high-resolution images of pedestrians. However, the method is only effective when the pedestrian is not moving. If the pedestrian is moving, it is easy to get out of the view of camera's field. It is very difficult to manual control the PTZ camera to make the pedestrians appear in the center of view. But PTZ tracking can make ensure that the moving target appears in the center of view. After suitable optical zoom in, the target will not be out of the scope of view and then we can obtain the high-resolution images of pedestrians.In the PTZ tracking system, the most important is the tracking algorithm and the control algorithm. Tracking algorithm detects and tracks the target in the image. The control algorithm controls the rotation angle of the motor according to the target position in the image, and then to make the target appear in the center of the image. Chang et al [1]. Suggested that the center of the image can be divided into eight directions, namely east, west, south, north, southeast, southwest, northeast and northwest. If the target is detected at the center of the southeast, then make the control to let motor go to southwest. Xiang et al [2]. proposed closed-loop control method basing on the concept of feedback.Owing to the larger deviation of the traditional algorithm, this paper directly establishes the relationship between the target position and the motor control angle for achieving a high accuracy based on pinhole camera model and camera distortion model.II.PTZ T RACKING S YSTEM O VER VIEWFIGURE I. THE STRUC TURE OF PTZ TR ACKING SYSTEM.As is shown in Figure 1, the whole PTZ tracking system consists of three parts, the image acquisition part, the tracking algorithm part and the PTZ control algorithm part. The system firstly obtains video streaming from the PTZ camera, and then uses the tracking algorithm to obtain the position of the targets. Then the PTZ camera control algorithm calculates the rotation angle and gives the orders to the PTZ camera. Drive the PTZ camera moving and make the target appear in the center of the image.Image acquisition part mainly acquires images from the video stream as an input of tracking algorithm. In order to meet the requirements of the tracking algorithm, this part also consists of image feature enhancement and pre-image processing algorithm. It is noted that the poor image quality and the image blurring problems because of the moving of camera. So during the video capture, we capture the image interval, the image is captured at a frame 1, frame 7.There are many different kinds of tracking algorithm. There is not a tracking algorithm which is popular now can perfectly solve the pose variation, illumination, occlusion and blur in tracking. And specific applications, the tracking algorithm is strict with real-time capability. This paper used compressive tracking algorithm proposed by Zhang Kaihua et al [3]. The compressive tracking algorithm runs in real-time and performs favorably against state-of-the-art algorithms on challenging sequences in terms of efficiency, accuracy and robustness. Our experiments show that the speed can reach about 50 frames per second under the 720P resolution and the algorithm can meet requirements of the PTZ tracking system. So this paper focuson PTZ control algorithm.International Conference on Computer Information Systems and Industrial Applications (CISIA 2015)III. T HEOR YPTZ control algorithm means that how to control the camera pan and tilt to make the tracking target always has been the central position of the image. There are generally two kinds of thoughts to solve the problem of control. First ,we can stresses in precise mathematical mode .In other words, we can get accurate mathematical model of system through inputs and outputs based on a certain theory. Along with the simple controller, we can achieve very good effect. Second, we can design the controller of excellent performance. However, generally it is difficult to get the precise mathematical model, so we always choose the second solution to solve the control problem, but is not better than the first solution in control precision.Specific to the PTZ control, also have the above two kinds of thought. We can use classical control algorithms such as the PID. We can detect error (the distance between detected positon and the center of the image) at every frame then put it into PID algorithm and get outputs to control camera. The PID has three parameters, proportional coefficient, the integral coefficient and the differential coefficient and this three parameters can be adjusted based on experiments. When selecting the appropriate parameters, the system will be in the steady-state after n frames within the permissible range of error. But the best control algorithm cannot reach steady state in the k+1 time based on the position of k time. If we want to do this, we must select the first method and know the exact mathematical model of the system. At the same time, the system has no integral parts and great noi se. The tracking system of this paper also happens to meet these conditions, so it can be done in one step and make target appears in the center position of the image.In the 3.1 section, the pinhole camera model and lens distortion model will be given a brief description. This part is the theoretical basis to get accurate mathematical model. In 3.2 sections, a model-based algorithm for PTZ camera control was described in detail.A. The Pinhole Camera Model and the Lens Distortion Model o-xyz is defined as the camera coordinate where o is the optical center of the camera. o-uv is defined as camera image plane coordinates in pixels units, where origin point is the upper left corner. o-xy is defined as the physical image plane coordinate in millimeters unis where origin point is defined the intersection of the optical axis and the image plane. It is also called the principal point of the image in the o-uv and coordinates is [u0, y0]T . As is show in figure 2, a point P=[X, Y, Z]T in the camera coordinate is projected to a pointP =[xc,yc,1]Tin the camera image plane coordinates. According to the pinhole camera model, the relationship of projection is0000101c xc y x f u X y f v Y Z λ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(1) where fx and fy denote focal length (pixels) of the camera. Since the optical system of the camera has some flaws in the process of machining and assembly, when a point is projectedonto the image plane, there is an offset between the actual pointand the ideal point. In this paper, we only consider the radial distortion and eccentric distortion [4]. The normalized coordinates of P is Pn=[X/Y, Y/Z]T =[x, y]T . Let r represents the distance from point P to the principle point. We can get offset24622123122462212312()2(2)()(2)2x y x k r k r k r p xy p r x y k r k r k r p r y p xyεε=+++++=+++++ (2)In the eqn(2), k1, k2 and k3 is the radial distortion coefficients, p1and p2 is the eccentric aberration coefficients. Let P d =[x d , y d ]T denotes the idea positon. It can be expressed asd x d y x x y y εε=+=+, (3)There are 4 intrinsic parameters and 5 distortion coefficients above the formula.we can get 9 parameters based on zhang[5].B. A Model-Based Algorithm for PTZ Camera ControlFIGURE II. THE DIAGRAM OF PTZ CONTROL ALGORITHM BASEDON THE MODEL.It is necessary to find the mathematical relationship between the control amount and the amount of error and to build mathematical model to achieve the steady state at time k based on time k-1 the position of the target. A model-based algorithm for PTZ camera control proposed in Figure 2. [x 0, y 0]T is the point that expected position of the target appearing. We can make o-xyx passes through expected point by transform. If we rotate o-xyx by specific angles around X-axes and Y-axes respectively and let the Z-axis passes through the point P, the point P can be imaged the center position of the CCD sensor. According to the basic principles of geometry, if the rotation angle follows the eqn(4), the point P can appear at the center position of the image.00()()arctan arctan c c x y x x y y p t f f ⎛⎫⎛⎫--∆=∆= ⎪ ⎪ ⎪⎝⎭⎝⎭, (4) In the eqn(4), in order to calculation of the correct point (x c, y c ), We need five distortion parameters. Among them, f x and f y are camera intrinsic parameters. We can get them from 3.1 sections. Since the PTZ camera is the zoom camera, we need to find a function of Z and focal length. We can use the least-squares fitting method to obtain the relationship between Z and the focal length20122012......n x x x x xn ny y y y yn f a a Z a Z a Z f a a Z a Z a Z=++++=++++(5)We can obtain the corresponding f x, f y and Z after camera calibration at different Z values, then use a least squares fit the function of Z and focal length. Five distortion parameters not only can be treated in a similar method but also can use piecewise linear fit method. In this paper, the focal length is fitted with six-order least-squares polynomial. Five distortion parameters are fitted with piecewise linear.From 3.1, we know that the position of the target that is detected by tracking algorithm cannot be directly substituted into the eqn(4) due to the presence of distortion. If you want to get high accuracy, the distortion correction is needed. Let [u,v]T is the position of the target in o-uv , provided by tracking algorithm. P=[X,Y,Z]T is defined as the position of target in o-xyz , the normalized coordinates is defined as P n =[X/Y,Y/Z]T =[x,y]T . We can get00(u )(v )x yu v x y f f --==, (6)If the eqn(6) is substituted into eqn(3), we can get the ideal projection point in o-xy . Let P d =[x d ,y d ]T is the ideal projection point, so the correct point in o-uv is00c d x c d y x x f u y y f v =+=+, (7)If the eqn(7) is substituted into eqn(4), the rotation angle after distortion correction can be got.IV. E XPERIMENT SAs is shown in Figure 3, the experimental platform is based on Hikvision DS-2DF5286 Camera. Pan part can rotate for degree 360.Tilt part can rotate from degree -5 to degree 90. Its control interface uses the RS485 interface and video capture uses RJ45 cable interface.FIGURE III. THE LEFT IMAGE IS THE HIKVISION DS-2DF5286 PTZCAMERA.Other two images are the screenshot of the running test application. When you click any point on the screen, the point will be able to move to the canter of the screen. The middle image is the result of clicking the keyhole of the left cabinet. The right image is the result of clicking the keyhole of the right cabinet.The entire program is implemented in the Windows operating system, using the C ++ programming language. The software environment is the Visual Studio 2013 and Hikvision development kits. Experiments on a PC equipped with Windows 8.1, where the processor is Intel Xeon E5-1603, clocks at 2.8GHz and memory is 8GB.In the figure 3, there is a dot of radius of 5 pixels and a circle of radius of 25 pixels. The two marks can be used to estimates approximately error of PTZ control. The parameters of current PTZ values are displayed on the lower half of the screen. Figure 3 selects two cases from the experimental results. the left PTZ parameters are P275 and T04 and the others are P264 and T05.TABLE I. THE RESUL TS OF PTZ CONTROL ALGORITHM TES Tshows the results. Experimental results show that the algorithm proposed can be effectively applied to PTZ tracking system and the error is within 5 pixels in most cases.FIGURE IV . THE R ESUL TS OF PTZ TRACKING TEST. THE TIMESTAMP AND PTZ PAR AMETERS CAN BE SEEN ON THE TOPAND BOTTOM OF THE APPLICA TIONAs is shown in figure 4, this paper implements a simple PTZ tracking system based on the proposed algorithm and compressive tracking algorithm. The experiment shows the final results of the human face PTZ tracking system. From the change of PTZ parameters and the positon of face, it can be seen that the calculated rotation angle according to the proposed PTZ control algorithm can make the face keep on the center of the screen.V. C ONCLUSIONThe most important is the control algorithm and the tracking algorithm in the PTZ tracking system. The tracking algorithm finds the target position in the image and the control algorithm controls the rotation angle of the PTZ camera based on the target position and finally let the target appear in the center of the image. This paper focuses on the PTZ control algorithms. We propose a model-based algorithm for PTZ camera control using a pinhole camera model and camera distortion model. The experiments have shown that the error of the control algorithm is within 5 pixels. But because the image acquisition is not continuous, resulting in the loss of the many information of the relationship between frame and frame, so the compressive tracking algorithm is not as better as continuous acquisition, and then resulting in poor PTZ tracking effect(such as fast-moving targets). Therefore, the optimal PTZ tracking system should bea staticcamera fordetecting anda PTZ camera for tracking targets that use the target positon from static camera and solve the problem perfectly.R EFERENCES[1] Chang, Faliang, et al. "PTZ camera target tracking in large complex scenes." Intelligent C ontrol and Automation (WCICA), 2010 8th W orld Congress on. IEEE, 2010.[2] Xiang, Guishan. "R eal-time follow-up tracking fast moving object with an active camera." Image and Signal Processing, 2009. CISP'09. 2nd International Congress on. IEEE, 2009.[3] Zhang Kaihua, Lei Zhang,and Ming-Hsuan Yang."Real-time compressive tracking." Compu ter V ision –ECCV 2012. Springer B erlin Heidelberg, 2012. 864-877.[4] Fryer, John G., and Duane C. Brown. "Lens distortion for close-range photogrammetry." Photogrammetric engineering and remote sensing 52.1 (1986): 51-58.[5]Zhang, Zhengyou. "A flexible new technique for camera calibration." Pattern Analysis and Machine Intelligence, IEEE Transactions on 22.11 (2000): 1330-1334.。
Lesson开环与闭环控制

general, the etrol system are represented by the
block diagram of Fig.16.1 an input signal
or command γ is applied to the controller,
•Lesson开环与闭环控制
Unite 16 Open-loop and Closed-loop Control
• 当一个系统没有反馈结构时,我们称之为 开环系统,这是最简单也是最经济的控制 系统。但是,开环控制系统缺少精确度和 多方面适应性因此只能在最简单的环境中 使用。
•Lesson开环与闭环控制
•Lesson开环与闭环控制
Unite 16 Open-loop and Closed-loop Control
• However, it is quite likely that the house temperature is either above or below the desired value, owing to inaccuracy in the estimate. Without further deliberation, it is quite apparent that this type of control is inaccurate and unreliable. One reason for the inaccuracy lies in the fact that one may not know the exact characteristics of the furnace. The other factor is that one also no control over the outdoor temperature, which has a definite bearing on the indoor temperature.
PXE控制器 temperature controller 产品说明说明书
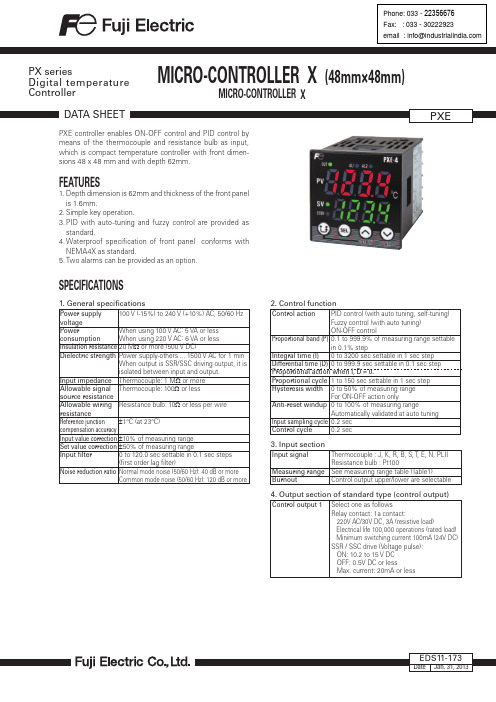
PXE controller enables ON-OFF control and PID control by means of the thermocouple and resistance bulb as input, which is compact temperature controller with front dimen-sions 48 x 48 mm and with depth 62mm.FEATURES1. Depth dimension is 62mm and thickness of the front panel is 1.6mm.2. Simple key operation.3. PID with auto-tuning and fuzzy control are provided as standard.4. Waterproof specification of front panel conforms with NEMA4X as standard.5. Two alarms can be provided as an option.SPECIFICATIONSMICRO-CONTROLLER X (48mm×48mm)MICRO-CONTROLLER X1.General specificationsPower supply voltage PowerconsumptionInsulation resistance Dielectric strengthInput impedance Allowable signal source resistanceAllowable wiring resistanceReference junction compensation accuracyInput value correction Set value correction Input filter Noise reduction ratio 100 V (-15%) to 240 V (+10%) AC, 50/60 HzWhen using 100 V AC : 5 VA or less When using 220 V AC : 6 VA or less 20 M Ω or more (500 V DC)Power supply-others ... 1500 V AC for 1 min When output is SSR/SSC driving output, it is isolated between input and output.Thermocouple: 1 M Ω or more Thermocouple: 100Ω or less Resistance bulb: 10Ω or less per wire ±1°C (at 23°C)±10% of measuring range ±50% of measuring range 0 to 120.0 sec settable in 0.1 sec steps(first order lag filter)Normal mode noise (50/60 Hz): 40 dB or moreCommon mode noise (50/60 Hz): 120 dB or more 3.Input sectionInput signal Measuring range BurnoutThermocouple : J, K, R, B, S, T , E, N, PLII Resistance bulb : Pt100See measuring range table (Table1)Control output upper/lower are selectable4.Output section of standard type (control output)Control output 1Select one as follows Relay contact: 1a contact:220V AC/30V DC, 3A (resistive load)Electrical life 100,000 operations (rated load) Minimum switching current 100mA (24V DC)SSR / SSC drive (Voltage pulse): ON: 10.2 to 15 V DC OFF: 0.5V DC or lessMax. current: 20mA or less2.Control functionControl actionProportional band (P)Integral time (I)Differential time (D)Proportional action when I, D = 0.Proportional cycle Hysteresis width Anti-reset windup Input sampling cycle Control cycle PID control (with auto tuning, self-tuning)Fuzzy control (with auto tuning)ON-OFF control0.1 to 999.9% of measuring range settablein 0.1% step0 to 3200 sec settable in 1 sec step 0 to 999.9 sec settable in 0.1 sec step 1 to 150 sec settable in 1 sec step 0 to 50% of measuring rangeFor ON-OFF action only0 to 100% of measuring rangeAutomatically validated at auto tuning0.2 sec 0.2 sec PX seriesDigital temperature ControllerPhone: 033 - 22356676Fax: : 033 - 30222923email:************************26. Alarm (option)Alarm kindAlarm ON-delayProcess alarmoutputAbsolute alarm, deviation alarm, zone alarmwith upper and lower limits for eachHold function available (See the figure below.)Alarm latch, Excitation/non-excitationselecting function providedDelay setting 0 to 9999 sec settable in 1 secstepsRelay contact: 1a contact: 220 V AC/30 V DC,1 A (resistive load)Electrical life 100,000 operations (rated load)Minimum switching current 100 mA (5 V DC)MAX 2 points output cycle 0.2 secTable 1 Measuring range tableinput signal measuring range(°C)measuring range(°F)Resistance bulbThermocouplePt100JKRBSTENPL2-200 to 8500 to 800-200 to 12000 to 16000 to 18000 to 1600-200 to 400-200 to 8000 to 13000 to 1300-300 to 15000 to 1500-300 to 22000 to 29000 to 32000 to 2900-300 to 700-300 to 14000 to 23000 to 230012. StructureMounting methodExternal terminalCase materialDimensionsWeightProtectivestructureOuter casingPanel flush mountingTerminal screw (M3)Plastic(non-combustible grade UL94V-0 equivalent)48 × 48 × 63.5mmApprox. 100gFront waterproof structure: NEMA4X(IEC standard IP66 equivalent)(when mounted on panel with our genuinepacking. Waterproof feature unavailablein close mounting of multiple units)Rear case: IEC IP20Black (front frame, case)11. Operation and storage conditionsAmbient operatingtemperatureAmbient operatinghumidityStorage temperatureConditions of 3-year warranty: -10͠ to 40͠(ambient temperature in use)Note) Basic warranty period is one year.-10°C to 50°CLess than 90% RH (no condensation)-20°C to 60°C9. Power failure processingMemory protection Held by non-volatile memory10. Self-checkMethod Program error supervision by watchdog timer8. Other functionsParameter maskfunctionConformitystandardsRoHS ConformitySelectable the Display/Non-display of allparameters by parameter settingSettable the Display/Non-display of eachparameter blockCE markingCompliant product7. PC loader function (under development)FunctionCommunication cableCable lengthSets, saves and copies the parameter.Dedicated cable (USB PXE)2mPeriod where lowerWhat is alarm with hold?The alarm is not turned ON immediately even when the processvalue is in the alarm band. It turns ON when it goes out the alarmband and enters again.5. Operation and display sectionParameter settingmethodDisplayStatus display LEDSetting accuracyIndication accuracy(at 23°C)Digital setting by 4 keysWith key lock functionProcess value/set value Independent display4 digits, 7-segment LEDControl output, process alarm output0.1% or less of measuring rangeThermocouple: r(0.5% of measuring range)r1 digit r1°CFor thermocouple R at 0 to 500°C ...r (1% of measuring range) r1 digit r1°CFor thermocouple B at 0 to 400°C ...r (5% of measuring range) r1 digit r1°CResistance bulb:r (0.5% of measuring range) r1 digitInput signal, measurementrange, and set value at thetime of deliver are as follows.Thermocouple K,Measurement range; 0 to400°C,Set value; 0°CInput signal of thethermocouple and theresistance bulb can beswitched by key operationon the front panel.3Scope of deliveryScope of delivery Controller, panel mounting bracket,watertight packing, instruction manualOptionRear terminal cover Loader communication cable Type: ZZPPXR1-A230Type: TQ401838C1Insulation block diagramNote: Basic insulation (dielectric strength voltage 1500V AC)between blocks delimited by line .Non-insulation between the blocks delimited by line .Power supply section Relay contact control outputAlarm relay contact1Measurement value inputInternal circuitVoltage pulse control output Alarm relay contact2Communication (loader)CONNECTION DIAGRAMPower supply 50/60HzThermocoupleinputResistance bulb inputControl output+–SSR/SSC drive outputPrinted in JapanCaution on Safety*Before using this product, be sure to read its instruction manual in advance.Information in this catalog is subject to change without notice.3-year warrantyWarranty period is 3 years if following conditions is satisfied.[Warranty period]Warranty period of delivered product is 3 years from the date that the product was shipped from our factory.[Warranty coverage]Following coverage is determined as usage conditions.1)Ambient temperature in use: –10 to +40℃2)Mounting method:standard stand-alone mountingNote) If installation is conducted such as placing each unit close together side by side, which is not covered under warranty.Following conditions are not covered under warranty.•Improper handling and usage by user•Malfunction is caused by other reason besides the deliveried product.•Modification and repair by user•Others, natural disaster and disaster etc.. ,for which vendor or manufacturer does not bear any responsible.Furthermore, warranty stated in this is considered only for the delivered product itself.Please note that warranty does not cover any damages attributable to malfunction of the delivered product.Contact Details:Industrial Supply Syndicate54, Ezra Street, Kolkata - 700 001, INDIAPhone: 22350923, 22356676 Fax: 91-33-30222923Email:*******************************:。
迪雅斯特恒定温度系统操作指南说明书

[3 step setting mode (hysteresis mode)]In the 3 step setting mode, the set value (P_1 or n_1) and hysteresis (H_1) can be changed. Set the items on the sub display (set value or hysteresis) with UP or DOWN button. When changing the set value, follow the operation below. The hysteresis setting can be changed in the same way.(1) Press the SET button once when the item to be changed is displayed on the sub display.The set value on the sub display (right) will start flashing.(2) Press the UP orThe set value can be increased with UP button and can be reduced with DOWN button.When UP and DOWN buttons are pressed and held simultaneously for 1 second or longer, the set value is displayed as [- - -], and the set value will be the same as the current pressure value automatically (snap shot function).Afterwards, it is possible to adjust the value by pressing UP or DOWN button.(3) Press the SET button to complete the setting.The pressure switch turns on within a set pressure range (from P1L to P1H) during window comparator mode.Set P1L, the lower limit of the switch operation, and P1H, the upper limit of the switch operation and WH1 (hysteresis) following the instructions given above.(When reversed output is selected, the sub display (left) shows [n1L] and [n1H].)∗:Set OUT2 in the same way. (P_2, H_2 etc.)∗:Setting of the normal/reverse output switching and hysteresis/window comparator mode switching areperformed with the function selection mode [F 1] OUT1 setting and [F 2] OUT2 setting.value Simple Setting Mode(1) Press and hold the SET button between 1 and 3 seconds in measurement mode. [SEt] is displayed on the main display.When the button is released while in the [SEt] display, the current pressure value is displayed on the main display, [P_1] or [n_1] is displayed on the sub display (left), and the set value is displayed on the sub display (right) (Flashing).(2) Change the set value with UP or DOWN button, and press the SET button to set the value. Then, the setting moves to hysteresis setting.(The snap shot function can be used.)(3) Change the set value with UP or DOWN, button, and press the SET button to set the value. Then, the setting moves to the delay time of the switch output.(The snap shot function can be used.)(4) Press the UP or DOWN button, the delay time of the switch output can be selected.Delay time setting can prevent the output from chattering.(5) Press the SET button for 2 seconds or longer to complete the setting.∗:If the button is pressed for less than 2 seconds , the setting will moves to the OUT2 setting.In the window comparator mode, set P1L, the lower limit of the switch operation,and P1H, the upper limit of the switch operation, WH1 (hysteresis) and dt1 (delay time) following the instructions given above.(When reversed output is selected, the sub display (left) shows [n1L] and [n1H].)∗:Set OUT2 in the same way.Default settingThe default setting is as follows.If no problem is caused by this setting, keep these settings.Switching function of [F 0] Pressure range, display unit and switch outputOther parameter settingsFunction Selection ModeIf you use the product by changing the setting, refer to the SMC website(URL ) for more detailed information, or contact SMC.∗:configuration of other functions, [- - -] is displayed on the sub display (right).[F 1] Setting of OUT1[F 2] Setting of OUT2Same setting as [F 1] OUT1.Peak/bottom value indicationThe max. (min.) pressure when the power is supplied is detected and updated.The value can be displayed on the sub display by pressing UP or DOWN button in measurement mode.Snap shot functionThe current pressure value can be stored to the switch output ON/OFF set point.When the set value and hysteresis are set, press the UP and DOWN buttons for 1 second or longer simultaneously. Then, the set value of the sub display (right)shows [- - -], and the values corresponding to the current pressure values are automatically displayed.Zero-clear functionIn measurement mode, when the UP and DOWN buttons are pressed for1 second or longer simultaneously, the main display shows [- - -], and the reset to zero.The display returns to measurement mode automatically.Key-lock functionTo set each of these functions, refer to the SMC website(URL ) for more detailed information, or contact SMC.MaintenanceHow to reset the product after a power cut or forcible de-energizing The setting of the product will be retained as it was before a power cut orde-energizing. The output condition is also basically recovered to that before a power cut or de-energizing, but may change depending on the operatingenvironment. Therefore, check the safety of the whole installation before operating the product. If the installation is using accurate control, wait until the product has warmed up (approximately 10 to 15 minutes).Note: Specifications are subject to change without prior notice and any obligation on the part of the manufacturer.© 2019 SMC Corporation All Rights Reserved Specifications/Outline with Dimensions (in mm)Refer to the product catalogue or SMC website (URL ) for more information about the product specifications and outline dimensions.TroubleshootingError indication functionThis function is to display error location and content when a problem or error has occurred.than above are displayed, please contact SMC.Refer to the SMC website (URL ) for more information about troubleshooting.Function selection modeIn measurement mode, press the SET button between 3 and5 seconds, to display [F 0]. Select to display the function to be changed [F ]. Press and hold the SET button for 2 seconds or longer in function selection mode to return to measurement mode.PS ※※-OMW0007Akihabara UDX 15F, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, JAPAN Phone: +81 3-5207-8249 Fax: +81 3-5298-5362URL Before UseSensor MonitorPSE3##A SeriesMounting and InstallationOutline of Settings∗: If a button operation is not performed for a certain time during the setting, the display will flash.(This is to prevent the setting from remaining incomplete if, for instance, an operator were to leave during setting.)∗: 3 step setting mode, simple setting mode and function selection mode settings are reflected each other.Set the pressure range, display unit and NPN/PNP output specifications.Measurement modePress the SET button between 3 and 5 seconds.[F 0] Setting of the switching function of the pressure range, display unit andswitch output specifications is completed.Move on to pressure range setting.Press the SET button.When selecting the buttons other than [USEr], move on to the display unit setting with SET button.Press the SET button to set.Move on to the switch output NPN/PNP specification switching setting.Press the SET button to set.Return to function selection mode.Press the SET button to set.Measurement mode (Initial setting is completed)Perform the setting with the 3 step setting mode, simple setting mode andfunction selection mode.Thank you for purchasing an SMC PSE3##A Series Digital Display Setting Equipment.Please read this manual carefully before operating the product and make sure you understand its capabilities and limitations. Please keep this manual handy for future reference.Safety InstructionsThese safety instructions are intended to prevent hazardous situations and/or equipment damage.These instructions indicate the level of potential hazard with the labels of"Caution", "Warning" or "Danger". They are all important notes for safety and must be followed in addition to International standards (ISO/IEC) and other safety regulations.OperatorSafety InstructionsPress the SET button for 2 second or longer.NOTE•The direct current power supply to be used should be UL approved as follows:Circuit (of Class 2) which is of maximum 30 Vrms (42.4 V peak), with UL1310Class 2 power supply unit or UL1585 Class 2 transformer.•The product is a UL approved product only if it has a mark on the body.InstallationMounting with bracketMount the bracket to the body with mounting screws (Self tapping screws:Nominal size 3 x 8L (2 pcs.)), then set the body to the specified position.∗: Tighten the bracket mounting screws to a torque of 0.5±0.05 Nm.Self tapping screws are used, and should not be re-used several times.•Bracket (Part No.: ZS-46-A1)∗: The panel mount adapter can be rotated through 90 degrees for mounting.Mounting with panel mount adapterMount part (a) to the front of the body and fix it. Then insert the body with (a)into the panel until (a) comes into contact with the panel front surface. Next,mount part (b) to the body from the rear and insert it until (b) comes into contact with the panel for fixing.•Panel mount adapter (Part No.: ZS-46-B)Panel mount adapter + Front protective cover (Part No.: ZS-46-D)Refer to the product catalogue or SMC website (URL )for more information about panel cut-out and mounting hole dimensions.WiringWiring connectionsConnections should be made with the power supply turned off.Use a separate route for the product wiring and any power or high voltage wiring.Otherwise, malfunction may result due to noise.If a commercially available switching power supply is used, be sure to ground the frame ground (FG) terminal. If the switching power supply is connected for use, switching noise will be superimposed and it will not be able to meet the product specifications. In that case, insert a noise filter such as a line noise filter/ferrite between the switching power supplies or change the switching power supply to the series power supply.How to use connectorand pull the connector straight out.Core wire colour Pin No.Brown Black White Grey Blue DC(+)OUT1OUT2FUNC DC(-)Internal circuit and wiring examples•NPN open collector 2 output + Analogue output Max.30 V,80 mAResidual voltage: 1 V or less•PNP open collector 2 output + Analogue output Max. 80 mAResidual voltage: 1.5 V or lessRefer to the product catalogue or SMC website (URL ) for more information about other internal circuit and wiring examples.Connector pin numbers。
IR33说明书

ir33 platform
ir33 ir33 power ir33 DIN powercompact powercompact small mastercella
User manual
User manual
ENGLISH
IMPORTANT WARNINGS
CAREL bases the development of its products on decades of experience in HVAC, on the continuous investments in technological innovations to products, procedures and strict quality processes with in-circuit and functional testing on 100% of its products, and on the most innovative production technology available on the market. CAREL and its subsidiaries nonetheless cannot guarantee that all the aspects of the product and the software included with the product respond to the requirements of the final application, despite the product being developed according to start-of-the-art techniques. The customer (manufacturer, developer or installer of the final equipment) accepts all liability and risk relating to the configuration of the product in order to reach the expected results in relation to the specific final installation and/or equipment. CAREL may, based on specific agreements, acts as a consultant for the positive commissioning of the final unit/application, however in no case does it accept liability for the correct operation of the final equipment/system. The CAREL product is a state-of-the-art product, whose operation is specified in the technical documentation supplied with the product or can be downloaded, even prior to purchase, from the website . Each CAREL product, in relation to its advanced level of technology, requires setup/configuration/ programming/commissioning to be able to operate in the best possible way for the specific application. The failure to complete such operations, which are required/indicated in the user manual, may cause the final product to malfunction; CAREL accepts no liability in such cases. Only qualified personnel may install or carry out technical service on the product. The customer must only use the product in the manner described in the documentation relating to the product. In addition to observing any further warnings described in this manual, the following warnings must be heeded for all CAREL products: • Prevent the electronic circuits from getting wet. Rain, humidity and all types of liquids or condensate contain corrosive
PIC单片机控制的多回路温度检测系统

1.引言对于塑料制瓶工艺,塑料加热处于溶融状态,经高压注射成为管胚,短时间冷却以后,经过高压空气的吹胀,在制瓶模具中成型。
其工艺特点之一是:溶融状态下的塑料定时流动;成为管胚之后,将与外部空气接触2秒钟时间左右,产品质量不可避免地受到环境温度的影响。
制瓶工艺要求在不同的制瓶过程中,恒定在不同的温度下,其温度控制是制瓶的关键技术之一。
目前这种设备的温度控制装置通常采用单回路的通用温度控制仪表,温度控制无法与工艺过程直接产生联系,使得温度控制达不到最优状态,而且受到环境温度的影响,必须随环境温度的变化调整温度控制参数,否则产品质量受到影响。
另一方面,单回路的通用温度控制仪表价格也比较高,且多采用线性模型及PID控制等经典控制方法往往很难达到理想的控制效果,而采用模糊控制,它具有不依赖对象的数学模型,鲁棒性强,算法简单容易实现。
因此,我们研制了采用PIC16F877单片机进行控制的低成本、高性能、与工艺过程直接产生联系的,不受环境温度影响的折叠开放式多回路温度控制装置。
2.系统硬件设计2.1硬件系统的构成本系统被设计为8个温度检测回路,每一个回路将热电偶产生的对温度的微弱信号,经过温度变送单元转换成0~5V的标准电压信号,送入PIC单片机进行A/D转换后作为模糊控制的输入,PIC单片机根据输入数据通过模糊控制计算出控制输出量,转化为PWM信号的占空比,由RD口引脚输出相应的高低电平控制固态继电器的动作从而实现对系统温度的控制,并通过C8051F020单片机控制SED1335,从而控制液晶显示器对结果进行显示。
对于多回路温度检测系统的硬件配置,本设计采用折叠开放式结构能够保证温度控制回路配置的灵活性和低成本。
系统硬件框图如图1所示。
整个系统由数据采集模块、主控模块、控制量输出模块和人机通讯模块四部分组成。
图1系统硬件结构框图2.2硬件的模块化设计2.2.1数据采集模块本设计的8路温度检测电路选用现代工业生产过程中使用极为广泛的热电偶为温敏元件进行温度的测量,根据热电偶的测温原理及其特点,为了使环境温度的变化不会影响温度检测和控制效果,在整个制瓶工艺过程中采用了多点多回路检测和非常实用的冷端温度补偿电路,使输出接近线性化,在实验过程中我们发现该电路的热电动势与被测温度基本上成单值函数关系。
建筑环境与能源应用工程专业英语16
Reynolds-averaged Navier-Stokes (RANS)
雷
诺时均方程法
Reynolds number
雷诺数
耗散
viscous stress
stress
剪切力
dissipation 粘性力 shear
Unit Six: Turbulence and Complex Flow
vector field 依靠坐标系的
Indoor Air Quality (IAQ) 室内空气品质
interdisciplinary 浓度
跨学科的
concentration
Environmental Sustainable Development
环
境可持续开展
pollutantceptor 内空气污染物
built environment
建筑环境
可持续性
sustainable development 可持续开展
可持续性方法
integrated approach 集成化方法
理论与实践
life cycle analyses
寿命周期分析
热舒适
visual comfort
视觉舒适
声觉舒适
indoor air quality 室内空气品质
fluid dynamics, fluid mechanics, hydrodynamics 流体力学
turbulent flow, turbulence 紊流湍流 laminar flow 层流
Direct Numerical Simulation (DNS) 直接模拟法
Large Eddy Simulation (lES) 大涡模拟
基于虚拟电阻的并网逆变器谐振抑制措施的研究
基于虚拟电阻的并网逆变器谐振抑制措施的研究慕昆;何国锋【摘要】由于电网阻抗的耦合作用,基于LCL滤波器并网的光伏逆变器会产生谐振.为了抑制逆变器并网时产生的谐振,文章首先分析了滤波电容串联电阻的无源阻尼的控制,并在此基础上推导出等效的有源阻尼的控制方法,同时对比了无源阻尼和有源阻尼的特点,分析了阻尼系数、虚拟电阻和电容电流反馈系数之间的关系.建立了包含有源阻尼的逆变器并网闭环数学模型,在此模型基础上,分析了阻尼系数对控制系统性能的影响.最后在10 kW并网逆变器上进行了实验,实验结果表明,文章采用的有源阻尼控制策略能够有效地抑制并网谐振.%For the influence of grid impedance,the resonance will occur in the PV inverters which are connected to grid with LCL filters.To suppress the resonance of grid inverter,the damping method is usually adopted,including passive damping method and active damping one.Firstly,the passive damping control method is analyzed,in which the passive resistor is connected to the capacitor of LCL filter in series.The equivalent active damping method is derived from the above-mentioned passive damping circuit by the feedback of capacitor current of LCL filter.Meanwhile,the difference between active and passive damping is compared,and the corresponding relationships among damping coefficient,virtual resistor and feedback gain of filter capacitor are conducted successively.Then the closed-loop control mathematical modei of the resonant circuit is established.and the influence of virtual resistor on control system is studied.Finally,the presented control method is verified by experiments on 10 kW grid inverter.The experimentalresults show that the presented control strategy can effectively suppress the resonance between the grid inverter and the main grid.【期刊名称】《可再生能源》【年(卷),期】2016(034)006【总页数】6页(P815-820)【关键词】无源阻尼;有源阻尼;并网谐振;电容电流反馈;谐振机理【作者】慕昆;何国锋【作者单位】河南工程学院计算机学院,河南郑州 451191;河南城建学院电气与信息工程学院,河南平顶山 467036【正文语种】中文【中图分类】TM46在并网运行模式下,LCL滤波的并网逆变器在公共耦合点(PCC)和电网相连。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
闭环温度控制系统--利用LabVIEW的一客户的设计PID控制控制器摘要利用LabVIEW的( G语言), PID控制算法是模拟。
所设计的虚拟文书,包括所有必要的组件和必要的设施的正常运行和控制任何线性过程。
问题积分windup ,衍生超支,输出信号的限制和采样间隔δ t分别对待。
创建小组第六被用来作为控制器在闭环控制一炉温度。
实验结果表明,高度的衔接与所取得的成果时,一电子硬连线控制器利用。
关键词PID控制算法,采样周期,积分windup ,软陶瓷PID控制器,硬连线控制器。
期间,从中期五十年代到七十年代中期,模拟计算机被广泛用来获取的反应控制系统。
在这段时间数字计算是非常昂贵的和缓慢的情况相比,今天的。
有一点软陶瓷可用,一要程序解决问题的用机代码。
在昨( 15 )年时,该图片已急剧变化为社会福利的数字电脑。
作为成本的数字计算,下跌和其运算速度增加,模拟计算机逐步取代数码计算机.现如今,学习效果的控制策略和控制器的参数对反应的一个复杂的控制系统,一,必须使用计算机模拟。
一个通用的控制策略是PID控制算法。
如果PID控制器是适当的调整,将产生一个可接受的控制,大部分工业过程。
PID控制器的代表,最终在控制一个持续的过程,对于一个具体的数学描述(传递函数)不能书面[柯蒂斯四约翰逊1984年] 。
编程PID控制算法使用的更高水平的语言,如C ,帕斯卡尔,或Fortran的,这项工作将容易得多和少的错误容易,比当使用汇编语言。
高层次的语言,使我们能够使用浮点型数学。
负号码和溢出是自动处理[ j.迈克尔雅各布, 1989年] 。
一的优秀代表高层次的语文是LabVIEW 的。
的优点,这种语言给出了具体的在, [国家文书, 2002年] 。
我们认为,主要的优势,LabVIEW的常规高层次的语文是图形用户界面,这是建于,直观的在运作,和简单申请.根据 [国家文书, 2002年]生产力,是更好地与LabVIEW比常规语文为的一个因素( 5-10 )时代相比,与C对一个小项目。
如果没有PID控制仿真软件,在我们的情况下,是有必要写一自己的电脑程式。
它仍然是有启发性,以了解如何写计算机程序(虚拟仪器对)为目的的认识问题和限制相关商业仿真软件。
的例子,这些问题是选择步长的独立变量(δ T )或建立初始条件。
在他的宝贵的资源, [国家文书, 2002年] ,加里瓦特约翰逊写道:“我写的PID可见,在实验室的PID控制工具包与目标,他们应该可以很容易地申请和修改。
每一个控制工程师有个人的喜好,以其中的味道PID控制算法应该用在任何特定的情况.你可以重写供应PID控制的职能,把您最喜爱的算法,只是因为我这个程序,特别是集(我个人信托)并不意味着它的总是最好的为每一种应用“。
建设就上述,我们热情地鼓励尝试模拟PID控制算法在我们自己的方式,利用实验室观点的基本职能,并验证算法的模拟测试,它实际上是在一个温度控制系统.实验的结果表明,当设计PID 控制软件时,电子硬连线PID控制器使用的反应温度控制系统的一个单位,分步投入,实际上是相同的。
另一个优点,以计算机为基础的软陶瓷控制的灵活性,可在修改控制策略。
这使得有可能做进一步的改善,以达到更好的系统表现.例如,它并不难,修改PID控制算法,通过改变增益,在短暂的时期,以尽量减少系统的超响应时间,保持在同时在一零稳定状态,抵销了。
以下,我们将描述控制算法及说明实验结果。
编程PID控制算法PID控制器的第六组成四个分可见:比例,积分,导数和δ吨小组vis.the数学算法的PID控制器是如下:其中e ( t )是错误的。
金伯利进程,奇,科威特第纳尔,是系数的比例,积分,并衍生诉讼分别。
比例六为比例控制器只,下列方程适用于:在为了让行动单纯比例乘以错误E (吨)比例常数(增益)金伯利进程。
框图是表现在数字( 1 )。
积分六积分行动是评估利用梯形的方法。
数学的代表性积分行动,分列如下,(图( 2 ))。
图( 2 )梯形的方法一体化如当K = 0 , 1 , 2 ,…… N和吨= δ吨=采样比率.框图积分六是显示在图( 3 )。
当积分行动六是所谓的,而循环执行,因为一旦有条件的终端连接到一个布尔常数(假)。
误差通过误差控制。
误差值是增加的价值错误,由过去的迭代。
这样做是由移位寄存器。
然后价值的总结,是除以2再乘以增益KI和样本的时间δ汤匙之后,一个布尔值,通过布尔的PID控制在范围内。
这是调查是否PID的输出限制,目前达到或没有。
如果布尔值是真的话,这意味着该PID的输出在于在其范围内,计算值一体化是添加到原先的值。
如果布尔值是假的话, PID 是饱和和价值的输出积分行动必须保持恒定,直到PID的输出是范围。
衍生金融工具第六数学方程衍生公式如下:衍生诉讼,将计算使用落后的差分方法,图( 4 ):框图衍生金融工具的六是表现在数字( 5 )。
过程变量传递到六,通过逐控制。
过去的价值的过程中的变数是减去从目前的PV值,那么结果是除以该样本的时间δ吨,和最终的结果,经过记名表决,乘以与衍生金融工具的增益(科威特第纳尔)。
使用选择功能,一个条件,以防止除数为零(在案件δ吨是零),是包括在内。
若δ T是大于零,计算值通过向衍生诉讼的指标。
若δ吨少或等于零的,因为某种原因,然后一值为零,是通过向衍生诉讼的指标。
δ吨的虚拟仪器这六是要计算的时间之间的每两个样本(δ吨)。
这六,是非常重要的,因为它是需要的实时控制.它只有一个输出,并没有投入。
框图是表现在数字( 6 )。
蜱计数函数返回内部定时器的CPU在毫秒。
参考时间是未定义的,所以剔计数的价值不能实现到现实世界的时间。
计时器价值扭曲的形式( 232升)为零。
在第一次迭代循环的计数功能,使内部定时器价值,那么初始值存储在移位寄存器(这是等于零在第一次迭代)减去此值。
结果是在毫秒的时间过去了之间的第一次呼唤调查和第二次的呼唤,这六。
后除以这个值由1000年,其结果是在几秒钟。
在第一要求,这六,之间的时间差第一迭代和前一个是内部定时器的价值。
因为这个值是不是参照一个已知的价值,这是非常大,是不是真正的时间价值,所以,它必须不获通过传出.因为这一目的的一个条件的声明是由比较,此值来任意代表人数的最高允许拖延。
如果这个值大于任意号码,然后它通过了一些0.01 ,即接近实际价值,在下面的迭代。
如果该值小于这个任意数量的话,六通的价值,这是一个正确的时间差。
在未来的迭代,其价值的点击计数,让目前的内部定时器的价值。
减去以前的值存储在移位寄存器,由目前的价值的点击计数,我们得到的时间过去了,这之间的迭代和过去的迭代,这是需要时间来执行整个程序一次。
在其他换言之,这是之间的时间第一个样本,并在未来的样本。
完整的PID六的PID输出的总和产出的比例,积分和衍生诉讼。
前面板和框图的PID六世是表现在数字( 7 )。
价值观的过程变量(光伏)和错误E ( t )的传递给PID的六,通过光伏和误差控制。
输出的PID合格通过的PID输出批示器.如果输出的PID是范围之间的上限和下限管制,那么这个值通过在胁迫( x )的码头和一个真正的布尔值在范围内终端的范围内,并胁迫的功能。
如果输出的PID六大于上限,则价值的上限,通过制定和虚假的通行证移位寄存器。
不过,如果输出的PID六是低于下限,其价值的下限,通过制定和虚假的价值传递给移位寄存器。
在这里,布尔值是用来防止积分风。
温度控制采用PID控制虚拟仪器温度控制系统是一个实验室的实验板制造[程介南瓦特约翰逊1994年]董事会允许实验调查,无论是温度测量和闭环温度控制。
董事会包括一个电炉模型,温度传感器和电子硬连线的PID控制器。
为了比较的目的,烘箱温度控制由模拟PID控制(六)和建于电子PID控制器。
主要电路的实验板,给出了在图( 8 )。
前面板和框图温度控制六世是表现在数字( 9 )。
实验结果1 -比例只有控制模式使用的P ID六。
图( 10 )表明,系统响应为三个不同的价值系统增益。
通过增加获得抵销下降,和时间,跌幅也上升。
2 -磷,有价证券投资,与P ID控制,当使用P ID控制v i.figure( 1 1)表明,系统响应为3模式控制。
3 -系统的反应,当它退出的负荷侧,并通过改变设定点,(输入端)系统的反应,显示在图( 1 2)4 -之间的比较硬件和软陶瓷控制系统。
图( 13 )说明所取得的反应磷,有价证券投资,模式控制。
结论1 。
利用实现室观点的基本控制,指标和方框图的功能,图形化的PID 控制的设计和测试。
创造了一个小组的第六类似于内置电子控制器使得更容易调控制器通过变异管制金伯利进程,奇,科威特第纳尔,没有提到的内部组成部分的PID框图。
2.因使用的前面板,模拟的PID控制算法,让用户灵活地观察实时变化的任何输入,输出和中间系统变量,并进行网上励磁从负荷侧,还是从投入的一面。
3.当实现软件的PID控制器,是很容易的,包括所需的额外修改和改进,如积分结束,衍生超支,控制器输出的限制,和选择的采样间隔4.实验的结果表明,有高度衔接的表现,该软件的PID控制器和性能的电子硬连线的PID控制器,当两者都是利用在闭环系统的温度控制。
MOHAMMAD A.K. ALIA, MOHAMMAD K. ABU ZALATAFaculty of Engineering TechnologyAl-Balqa’ Applie d UniversityAmman, Jordon参考巴里e. paton 1999年,“ LabVIEW图形化编程仪器”。
普伦蒂斯霍尔和平之路,新泽西州,美国柯蒂斯四约翰逊1984年,“基于微处理器的过程控制”。
普伦蒂斯-霍尔国际公司Englewood的悬崖,新泽西州,美国德-洛伦佐, 2002年,电子实验室,“(基本法委员会研究温度调节)”。
dl.2155rgt1 , dl.2155rgt2 , Milano ,意大利司长r. coughanowr , 1991年,“过程systemsanalysis和控制”。
麦格劳-希尔公司,新加坡程介南瓦特约翰逊, 1994年。
“ LabVIEW图形化编程”。
麦格劳-希尔公司,纽约,美国j.迈克尔雅各布, 1989年,“工业控制电子”。
普伦蒂斯-霍尔国际股份有限公司,新新泽西州,美国美国国家仪器公司, 2002年, LabVIEW的基本介绍,课程手册,美国美国国家仪器公司, 1996年,“ LabVIEW图形化编程仪器”。
用户manual.new新泽西州,美国。