具有理想跟踪特性的多变量变结构模型参考自适应控制
现代控制技术考试必考的问答题

现代控制理论研究的对象不再局限于单变量的,线性的,常定的,连续的系 统,而扩展为多变量的,非线性的,时变的,离散的系统。现代控制理论以线性 代数和微分方程为主要数学工具,以状态空间法为基础,分析和设计控制系统。 所谓状态空间法,本质上是一种时域分析方法,它不仅描述了系统的外部特性, 而且揭示了系统的内部状态和性能。 现代控制理论分析和综合系统的目标是在揭 示其内在规律的基础上, 实现系统在某种意义上的控制理论的主要内容包括如下五个分支:线性 系统理论、建模和系统辨识、最优滤波理论、最优控制、自适应控制。 二、最优控制理论的方法: 现代控制理论的方法本质是一种时域方法, 它是建立在状态变量描述方法基 础上的,它着眼于系统的状态,能更完全的表达系统的动力学性质,在解决最优 控制问题中,极大值原理和贝尔曼动态规划是最重要的两种方法。 三、分析比较指标泛函与经典控制理论的性能指标: 性能指标在数学上成为泛函, 经典控制理论中的性能指标一般为最大超调量、 阻尼比、幅值裕度和相位裕度等。 现代控制理论的二次型指标泛函的意义:花费尽量少的控制能量,使系统的 输出尽可能地跟随期望输出变化。常见的二次型性能指标分两类:线性调节器和 线性伺服器。 假定状态方程: x(t ) A(t ) x(t ) B(t )u (t ) , x(t0 ) x0 寻求最优控制 u(t ) ,使性能指标达到极小值
二十,经典控制与现代控制理论的区别 经典控制理论是以传递函数为基础的一种控制理论, 系统的设计是建立在某 种近似或试探的基础上,控制对象一般是单输入单输出、线性定常系统、分析方 法是频域特性分析法, 根轨迹分析法, 采用的控制策略有 PID 控制、 反馈控制等, 这种控制理论不能实现最优控制。 现代控制理论是建立在状态空间上的一种控制方法, 控制的数学模型一般是 状态方程,系统的的分析与设计是精确的,控制对象可以使单输入单输出、多输 入多输出、线性定常系统、非线性定常系统、连续控制系统、离散或数字控制系 统,采用的控制策略有状态反馈、输出反馈、极点配置等,这种控制理论可以实 现最优控制。 二十一,建立数学模型的方法 即对具体的对象, 应用相应的数学和物理的原理以及定律, 列写对象满足的 物理方程, 选取合适的状态变量和输出变量,将对象的物理方程转化为状态空间 表达式的标准形式。 二十二,自适应控制定义以及分类 (1)、定义:自适应控制的基本思想,是通过在线辨识或某种算法使这种 不确定或变化的影响逐渐降低以至消除,它修正控制器自己的特性,以适应对象 和扰动的动态特性变化。 其研究对象是具有一定程度不确定性的系统,能够修正 自身特性以适应对象和扰动变化的控制器称为自适应控制器, 自适应控制是主动去适应这些系统或环境的变化,而其它控制方法是被动地、 以不变应万变地靠系统本身设计时所考虑的稳定性裕量或鲁棒性克服或降低这 些变化所带来的对系统稳定性和性能指标的影响 (2)、分类:典型的自适应控制包括模型参考自适应控制和自校正控制 二十三、 典型的自适应控制包括模型参考自适应控制 MARC 和自校正控制 STC (1)、自校正控制 STC——用递推辨识算法辨识系统参数,然后根据系统运 行指标来确定调节器或控制器参数; 自校正控制系统与其它自适应控制系统的区 别为其有一显性进行系统辨识和控制器参数计算 (或设计)的环节这一显著特征; 一般情况下自校正控制仅适用于离散随机控制系统, 在有些情况下也可用于混合 自适应控制系统。
先进控制技术综述

先进控制技术综述1 引言在实际的工业控制过程中,很多系统具有高度的非线性、多变量耦合性、不确定性、信息不完全性和大滞后等特性。
对于这种系统很难获得精确的数学模型,并且常规的控制无法获得满意的控制效果。
面对这些复杂的工业控制产生了新的控制策略,即先进控制技术。
先进控制技术包括:自适应控制,预测控制,推理控制,鲁棒控制以及包括模糊控制与神经网络在内的智能控制方法。
本文详细介绍了自适应控制、预测控制以及这两种先进控制的应用领域和优缺点[1]。
2 自适应控制自适应控制的思想是对于系统中的不确定性,以及控制任务的艰巨性,对于部分未建模的动态特性、变化的被控对象和干扰信号,及时地测得它们的信息,并根据此信息按一定的设计方法,自动地做出控制决策、修改控制器结构和参数,使其控制信号能够适应对象和扰动的动态变化,在某种意义上达到控制效果最优或次优。
2.1 自适应控制介绍目前自适应控制的种类很多,从总体上可以分为三大类:自校正控制、模型参考自适应控制和其他类型的自适应控制。
自校正控制的主要问题是用递推辨识算法辨识系统参数,根据系统运行指标来确定调节器或控制器的参数。
其原理简单、容易实现,现已广泛地用在参数变化、有迟滞和时变过程特性,以及具有随机扰动的复杂系统。
自校正控制系统的一般结构图如图1所示。
自校正控制适用于离散随机控制系统[2]。
图1 自校正控制结构图模型参考自适应控制,利用可调系统的各种信息,度量或测出各种性能指标,把模型参考自适应控制与参考模型期望的性能指标相比较;用性能指标偏差通过非线性反馈的自适应机构产生自适应律来调节可调系统,以抵消可调系统因“不确定性”所造成的性能指标的偏差,最后达到使被控的可调系统获得较好的性能指标的目的。
模型参考自适应控制可以处理缓慢变化的不确定性对象的控制问题。
由于模型参考自适应控制可以不必经过系统辨识而度量性能指标,因而有可能获得快速跟踪控制。
模型参考自适应控制结构框图如图2所示,模型参考自适应控制一般用于确定性连续控制系统。
基于Lyapunov稳定性理论的模型参考自适应控制器
4.4 基于Lyapunov稳定性理论的模型参考自适应控制器4.4.1 模型参考自适应控制系统的结构和特点⏹MRAC系统具有多种结构形式,互相之间可以互相转换。
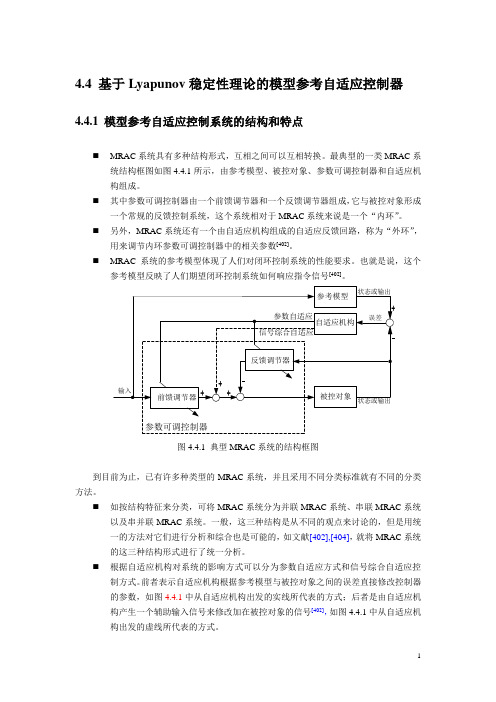
最典型的一类MRAC系统结构框图如图4.4.1所示,由参考模型、被控对象、参数可调控制器和自适应机构组成。
⏹其中参数可调控制器由一个前馈调节器和一个反馈调节器组成,它与被控对象形成一个常规的反馈控制系统,这个系统相对于MRAC系统来说是一个“内环”。
⏹另外,MRAC系统还有一个由自适应机构组成的自适应反馈回路,称为“外环”,用来调节内环参数可调控制器中的相关参数[402]。
⏹MRAC系统的参考模型体现了人们对闭环控制系统的性能要求。
也就是说,这个参考模型反映了人们期望闭环控制系统如何响应指令信号[402]。
图4.4.1 典型MRAC系统的结构框图到目前为止,已有许多种类型的MRAC系统,并且采用不同分类标准就有不同的分类方法。
⏹如按结构特征来分类,可将MRAC系统分为并联MRAC系统、串联MRAC系统以及串并联MRAC系统。
一般,这三种结构是从不同的观点来讨论的,但是用统一的方法对它们进行分析和综合也是可能的,如文献[402],[404],就将MRAC系统的这三种结构形式进行了统一分析。
⏹根据自适应机构对系统的影响方式可以分为参数自适应方式和信号综合自适应控制方式。
前者表示自适应机构根据参考模型与被控对象之间的误差直接修改控制器的参数,如图4.4.1中从自适应机构出发的实线所代表的方式;后者是由自适应机构产生一个辅助输入信号来修改加在被控对象的信号[402],如图4.4.1中从自适应机构出发的虚线所代表的方式。
根据MRAC系统的设计方法可以分为如下三类:基于局部参数最优化的方法、基于Lyapunov稳定性理论的方法以及基于Popov超稳定性理论的方法。
⏹基于局部参数最优化的方法是最早采用的MRAC系统设计方法,通常称为MIT律。
⏹基于Lyapunov稳定性理论的方法是Butcharty及Parks于六十年代中期相继提出的[404],[405],这种方法与局部参数最优化方法相比,不仅可保证系统的稳定性,还具有自适应速度快的优点。
模型参考自适应控制

10.自适应控制严格地说,实际过程中的控制对象自身及能所处的环境都是十分复杂的,其参数会由于种种外部与内部的原因而发生变化。
如,化学反应过程中的参数随环境温度和湿度的变化而变化(外部原因),化学反应速度随催化剂活性的衰减而变慢(内部原因),等等。
如果实际控制对象客观存在着较强的不确定,那么,前面所述的一些基于确定性模型参数来设计控制系统的方法是不适用的。
所谓自适应控制是对于系统无法预知的变化,能自动地不断使系统保持所希望的状态。
因此,一个自适应控制系统,应能在其运行过程中,通过不断地测取系统的输入、状态、输出或性能参数,逐渐地了解和掌握对象,然后根据所获得的过程信息,按一定的设计方法,作出控制决策去修正控制器的结构,参数或控制作用,以便在某种意义下,使控制效果达到最优或近似更优。
目前比较成熟的自适应控制可分为两大类:模型参考自适应控制(Model Reference Adaptive Control)和自校正控制(Self-Turning)。
10.1模型参考自适应控制10.1.1模型参考自适应控制原理模型参考自适应控制系统的基本结构与图10.1所示:10.1模型参考自适应控制系统它由两个环路组成,由控制器和受控对象组成内环,这一部分称之为可调系统,由参考模型和自适应机构组成外环。
实际上,该系统是在常规的反馈控制回路上再附加一个参考模型和控制器参数的自动调节回路而形成。
在该系统中,参考模型的输出或状态相当于给定一个动态性能指标,(通常,参考模型是一个响应比较好的模型),目标信号同时加在可调系统与参考模型上,通过比较受控对象与参考模型的输出或状态来得到两者之间的误差信息,按照一定的规律(自适应律)来修正控制器的参数(参数自适应)或产生一个辅助输入信号(信号综合自适应),从而使受控制对象的输出尽可能地跟随参考模型的输出。
在这个系统,当受控制对象由于外界或自身的原因系统的特性发生变化时,将导致受控对象输出与参考模型输出间误差的增大。
模型参考自适应控制与模型控制比较
模型参考自适应控制与模型控制比较模型参考自适应控制(Model Reference Adaptive Control, MRAC)和模型控制(Model-based Control)都是现代控制理论中常用的方法。
它们在实际工程应用中具有重要意义,本文将对这两种控制方法进行比较和分析。
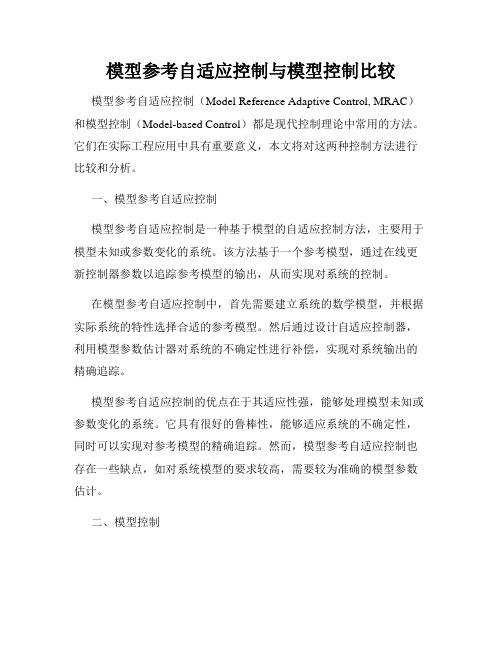
一、模型参考自适应控制模型参考自适应控制是一种基于模型的自适应控制方法,主要用于模型未知或参数变化的系统。
该方法基于一个参考模型,通过在线更新控制器参数以追踪参考模型的输出,从而实现对系统的控制。
在模型参考自适应控制中,首先需要建立系统的数学模型,并根据实际系统的特性选择合适的参考模型。
然后通过设计自适应控制器,利用模型参数估计器对系统的不确定性进行补偿,实现对系统输出的精确追踪。
模型参考自适应控制的优点在于其适应性强,能够处理模型未知或参数变化的系统。
它具有很好的鲁棒性,能够适应系统的不确定性,同时可以实现对参考模型的精确追踪。
然而,模型参考自适应控制也存在一些缺点,如对系统模型的要求较高,需要较为准确的模型参数估计。
二、模型控制模型控制是一种基于数学模型的控制方法,通过对系统的建模和分析,设计出合适的控制器来实现对系统的控制。
模型控制方法主要有PID控制、状态反馈控制、最优控制等。
在模型控制中,首先需要建立系统的数学模型,并对模型进行分析和优化。
然后根据系统的特性,设计合适的控制器参数。
最后,将控制器与系统进行耦合,实现对系统的控制。
模型控制的优点在于其理论基础牢固,控制效果较好。
它能够根据系统的数学模型进行精确的设计和分析,具有较高的控制精度和鲁棒性。
然而,模型控制方法在实际应用中对系统模型的要求较高,而且对系统参数变化不敏感。
三、比较与分析模型参考自适应控制与模型控制都是基于模型的控制方法,它们在实际应用中具有各自的优缺点。
相比而言,模型参考自适应控制具有更强的适应性和鲁棒性,能够处理模型未知或参数变化的系统。
第八章模型参考自适应控制(ModelReferenceAdaptiveControl)简称MRAC

第⼋章模型参考⾃适应控制(ModelReferenceAdaptiveControl)简称MRAC第九章模型参考⾃适应控制(Model Reference AdaptiveControl )简称MRAC介绍另⼀类⽐较成功的⾃适应控制系统,已有较完整的设计理论和丰富的应⽤成果(驾驶仪、航天、电传动、核反应堆等等) 。
§ 9—1 MRAC的基本概念系统包含⼀个参考模型,模型动态表征了对系统动态性能的理想要求,MRAC⼒求使被控系统的动态响应与模型的响应相⼀致。
与STR不同之处是MRAC没有明显的辨识部分,⽽是通过与参考模型的⽐较,察觉被控对象特性的变化,具有跟踪迅速的突出优点。
设参考模型的⽅程为*X m~ A m X m Br式(9-1-1)y m = CX m 式(9-1-2)被控系统的⽅程为■X s A s B s r式(9-1-3)y s - CX s 式(9-1-4) 两者动态响应的⽐较结果称为⼴义误差,定义输出⼴义误差为e = y m -y s 式(9-1-5);状态⼴义误差为:=X m — s 式(9-1-6)。
⾃适应控制的⽬标是使得某个与⼴义误差有关的⾃适应控制性能指标J达到最⼩。
J可有不同的定义,例如单输出系统的J —;e2( )d式(9-1-7)或多输出系统的t TJ ⼆e T( )e( )d式(9-1-8) MRAC的设计⽅法⽬的是得出⾃适应控制率,即沟通⼴义误差与被控系统可调参数间关系的算式。
有两类设计⽅法:⼀类是“局部参数最优化设计⽅法”,⽬标是使得性能指标J达到最优化;另⼀类是使得⾃适应控制系统能够确保稳定⼯作,称之为“稳定性理论的设计⽅法。
§ 9 —2局部参数最优化的设计⽅法⼀、利⽤梯度法的局部参数最优化的设计⽅法这⾥要⽤到⾮线性规划最优化算法中的⼀种最简单的⽅法梯度法(Gradient Method )。
1. 梯度法考虑⼀元函数f(x),当:汀(x)/= 0,且f2 (x) / ;x2> 0时f(x)存在极⼩值。
基于Lyapunov稳定性理论的模型参考自适应控制

基于Lyapunov稳定性理论的模型参考⾃适应控制0 引⾔中,Lyapunov 稳定性理论就是设计⾃适应率的有效⼯具。
这种基于稳定性理论的设计保证了系统的稳定[3],所以受到更⼴泛的应⽤。
⾃适应控制的定义到⽬前为⽌尚未统⼀,争议也⽐较多。
综合起来⾃ 2 基于Lyapunov稳定性理论设计控制规律适应控制系统主要有三个特征[1]:1)在线进⾏系统结构和参数的辨识或系统性能指标的度量,以便得到系统当前状态的改变情况;2)按照⼀定Lyapunov 提出了运动稳定性的⼀般理论,即Lyapunov 第⼀法和的规律确定当前的控制策略;3)在线修改控制器的参数或可调系统的输Lyapunov 第⼆法。
前者通过求解系统微分⽅程,然后根据解的性质判断系⼊信号。
现在应⽤⽐较⼴泛的⾃适应控制系统主要有两类:模型参考⾃适统的稳定性;后者不需要求解系统⽅程,⽽是通过具有⼴义能量属性的应控制和⾃校正调节器控制。
本⽂围绕模型参考⾃适应控制进⾏研究,并Lyapunov 函数的标量函数直接判定系统的稳定性。
应⽤Lyapunov 稳定性理利⽤MATLAB 仿真分析其性能。
论设计的控制系统既能求出参数调节的⾃适应规律,⼜确保了系统的稳定1 模型参考⾃适应控制性[4]。
假设被控对象的状态变量可以直接得到。
控制对象的状态⽅程为模型参考⾃适应控制是⼀类重要的⾃适应控制,它的主要特点是实现容易,⾃适应速度快,并在航空、汽车、机器⼈、医疗器械等领域得到了⼴泛应⽤。
模型参考⾃适应控制通过迫使被控对象跟踪特性理想的参考模型,来获得要求的闭环系统性能。
模型参考⾃适应控制系统主要由4部分组成[2],即参考模型、被控对象、⾃适应机构(调整控制器参数)和反馈控制器,如图1所⽰。
图1 模式参考⾃适应控制系统从图1可以看出,这类控制系统包含两个环路:内环和外环。
内环是由调节器、被控过程和反馈控制器组成的普通反馈回路,⽽外环包括参考模型和⾃适应机构等,控制器参数由⾃适应机构调整。
模型参考自适应控制—MIT法
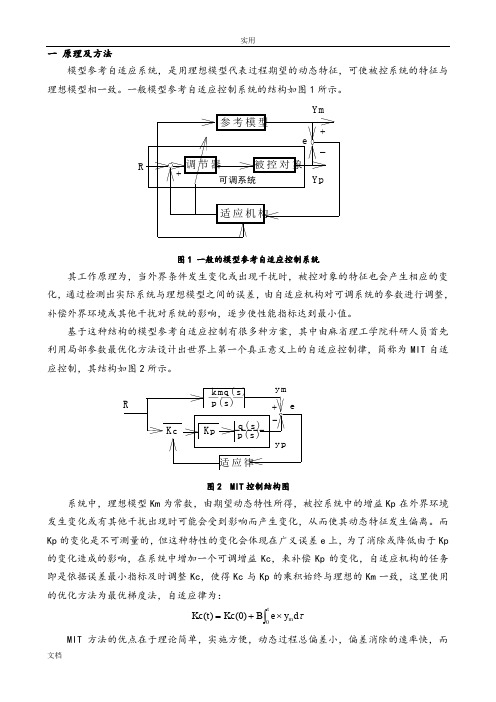
一 原理及方法模型参考自适应系统,是用理想模型代表过程期望的动态特征,可使被控系统的特征与理想模型相一致。
一般模型参考自适应控制系统的结构如图1所示。
图1 一般的模型参考自适应控制系统其工作原理为,当外界条件发生变化或出现干扰时,被控对象的特征也会产生相应的变化,通过检测出实际系统与理想模型之间的误差,由自适应机构对可调系统的参数进行调整,补偿外界环境或其他干扰对系统的影响,逐步使性能指标达到最小值。
基于这种结构的模型参考自适应控制有很多种方案,其中由麻省理工学院科研人员首先利用局部参数最优化方法设计出世界上第一个真正意义上的自适应控制律,简称为MIT 自适应控制,其结构如图2所示。
图2 MIT 控制结构图系统中,理想模型Km 为常数,由期望动态特性所得,被控系统中的增益Kp 在外界环境发生变化或有其他干扰出现时可能会受到影响而产生变化,从而使其动态特征发生偏离。
而Kp 的变化是不可测量的,但这种特性的变化会体现在广义误差e 上,为了消除或降低由于Kp 的变化造成的影响,在系统中增加一个可调增益Kc ,来补偿Kp 的变化,自适应机构的任务即是依据误差最小指标及时调整Kc ,使得Kc 与Kp 的乘积始终与理想的Km 一致,这里使用的优化方法为最优梯度法,自适应律为:⎰⨯+=tm d y e B Kc t Kc 0)0()(τMIT 方法的优点在于理论简单,实施方便,动态过程总偏差小,偏差消除的速率快,而Yp Yme+__+R参考模型调节器被控对象适应机构可调系统———kmq(s)p(s)KcKpq(s)-----p(s)适应律Rymype+-且用模拟元件就可以实现;缺点是不能保证过程的稳定性,换言之,被控对象可能会发散。
二 对象及参考模型该实验中我们使用的对象为:122)()()(2++==s s s p s q K s G pp 参考模型为:121)()()(2++==s s s p s q K s G mm 用局部参数最优化方法设计一个模型参考自适应系统,设可调增益的初值Kc(0)=0.2,给定值r(t)为单位阶跃信号,即r(t)=A ×1(t)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘
要
考 虑 一 十 广 义 相 对 阶 为 l的 多 变 量 系 统 之 变 结 构 模 型 参 考 自适 应 控 制 器 ( — RAC) VS M
设计 ‘ 口 , 出 了 一 种 切 换 控 制 方 案 解 决 了 现 有 多 变 量 VS M RAC 和 多 变 量 模 型 参 考 自 适 应 ]题 提 控 制 ( RAC) 两 十 尚 未 解 决 的 问 题 : ) 系 统 跟 踪 误 差 的 每 个 分 量 均 满 足 预 先 给 定 的 性 能 指 M 中 1使 标 ;2 无 须 假 定 对 象 高 额 增 益 矩 阵 满 足 通 常 的 正 定 性 条 件 )
维普资讯
自
动
化
学
报
2 8卷
究 始 于 18 2年 E l t 9 lot和 Woo i i lvc h奠 基 性 的 工 作 . 后 人 们 从 不 同 角 度 对 其 进 行 了 探 此 讨 . 前 . 变 量 MRAC 和 多变 量 Vs MRAC 系 统 研 究 中 遇 到 的 两 个 主 要 困 难 是 :1 当 多 )
Ke y wor M u tv ra e s s e s. v ra l t u t r c t o , a a i e c t o , hy ds li a ibl y t m a i b e s r c u e on r l d ptv on r l b 】 on r l rd c t o
。 Au ̄ a i c鲫 d a o a o y i e P r o c gie rn ( t t g L b r tr ,’ f LA Ai , En n e ig Um* r E i f t e s Y,Xi ’ ( i } iy n e 2 3 i t E ma l ] a e @ 6 l ) n e
i r orc n b o r le o gu r t et r nse ta t a y s a e p ror a c n ng e r a e c nt o l d t a an e he t a i n nd s e d — t t e f m n e i —
1 引 言
对 多 变 量 模 型 参 考 自适 应 控 制 ( o e fr n eAd p ieCo to . RAC) M dl Ree e c a t n r 1 M v 问题 的 研
国家 自 然 科 学 基 金 ( 0 4 0 ) 助 61 0 1资 7 收 椿 日期 2 0 S1 0 0O 一7 收 修 改 稿 bs r c Thi p r c n i e s h c nt o l r e i a ta t s pa e o s d r t e o r le d sgn of m u tv ra l V S M RA C lia ib e s t m fge r lz d r l tv gr e o ys e o ne a ie e a i e de e ne. A e 4 s ic ng s h m e i r po e hih n v w t hi c e s p o s d w c s l e he f lo i g pr bl m s i o v s t o l w n o e n VS— RA C a R AC : 1 v r o p e r c — M nd M )e e y c m on ntoft a k
维普资讯
第 2 8卷
第 1期
自 动
化
学
报
V ol 28 N 0.1
20 0  ̄年 1月
A CT A A U TO M A T I CA N I A SI C
j n 2 0 a . 02
具 有 理 想 跟 踪 特 性 的 多 变 量 变 结 构 模 型 参 考 自适 应 控 制 ¨
关 键词 多变 量 系统 , 结 构 控制 , 变 自适 应控 制 , 合 控制 混
中图分 类 号 TP 7 . 2 32
A U LT I AR I B LE — RA C I M V A VS M W TH EX PEC TED TR A N SI EN T AN D TE A D Y— STA TE S PER Fo RM A N C ES
d x g v n by d i e n a a c e i e esgn r i dv n e,a ) t su la s nd 2 he u a s um p i o ii e d fnie s ton ofp s tv e i t ne s p op r y f r h gh f e u c i a r ̄ i otne de r e t o i r q en y ga n m t i s n e d.
LI Ya M A 0 in Q i n Ja n
S N u Xi U Xi — a
ig 1 0 8 ) n 0 0 3
70 3 ) 1 0 8
< in les : fAeoa r 5a d Aarn ai . Be ig Unv ri ̄o rn ui n toa t s j t c c
林 岩 毛剑琴
西安
孙秀霞。
L 京 108 03 0
7 03 ) 1 0 8
( 京 航 空 航 王 大 学 自动 化 学 院 测 控 系 , 七 研 究 室 北 第
( 军 工 程 太 学 三 系 自动 化 载 研 室 空
f i:l y n e 2 3 l E maI i a e @ 6 t L n e)