SIMATIC s7-300 通信-串行通讯
S7-300和上位机的通讯的设置

北京首钢自动化信息技术有限公司运行事业部 SIMATIC S7 All rights reserved. Author by Phenix. Date:2005/06/01 File:Courseware_S7
9
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
09.下面用鼠标选择项目树型结构中的 图形编辑器,在窗口右侧区域点击鼠 标右键选择新建画面,点选新建的画 面,双击鼠标左键,打开图形编辑软 件,在对象选项板中,点击圆对象, 然后在画面上画一个圆。
10
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
10. 用鼠标点选项目圆,双击鼠标左键 就会打开对象属性对话框,我们建立 一个简单的颜色属性。鼠标左键选择 对象颜色属性,然后在右侧的窗口中, 点选北京颜色,再右键点击动态列的 灯,在弹出的菜单中选择动态对话框 选项,填写内容完成对象与变量的连 接。
11
SIMATIC S7
SIMATIC S7-400 与 WinCC V6.0 通讯
11. 最后保存画面后,点击快捷按钮,运行画面程序。
12
SIMATIC S7
SIMATIC S7-400 与 InTouch V9.0 通讯
前提:本例在安装有以下软件的PC机上实现通讯。 1.SIMATIC NET V6.0+SP2; 2.SIMATIC Step7 V5.3; 3.Wonderware FactorySuite I/O Servers Siemens SIMATIC NET S7; 4.Wonderware InTouch V9.0; 实现步骤: 01.依次点击菜单:开始SIMATIC SIMATIC NETSettingsSet PG-PC Interface 启动PG-PC接口设定界面; 02.在Access Point of the Application项 中选择S7ONLINE (STEP7) TCP/IP <本机网卡绑定> 03.点击桌面 件; 图标,启动Step7软
s7-300串口通讯

Automation and Drives
MODBUS RTU协议
SIMATIC S7-300
西门子网卡支持的MODBUS RTU协议功能
A&D CS2 崔坚 2005-通信
Automation and Drives
MODBUS RTU协议
SIMATIC S7-300
MODBUS RTU协议主站参数化
A&D CS2 崔坚 2005-通信
Automation and Drives
3964R 协议
SIMATIC S7-300
特点
1:利用第-层/第二层(OSI/ISO)进行通信
2:通信双方必须定义优先级
3:3964R与3964相比带有块校验
协议提供的服务
1:发送 2: 接收
A&D CS2 崔坚 2005-通信
4
5
可以读写通信方可以使用的数据区
HD=4 安全性好
缺点 1 2 RS485不能用 RK512基于3964R协议,通信性能不好
A&D CS2 崔坚 2005-通信
Automation and Drives
ASCII 协议练习1
SIMATIC S7-300
CPU发送数据,在PC的超级终端接收
A&D CS2 崔坚 2005-通信
A&D CS2 崔坚 2005-通信
Automation and Drives
串口接口及特点
SIMATIC S7-300
1) RS232C (V.24) 接口。最大通信距离为15m, 只 能连接单个设备,转换为RS485接口可以连接多个设 备。
CP340 连接头 针脚 1 2 3 4 5 6 符号 DCD RXD TXD DTR GND DSR 输入/输出 输入 输入 输出 输出 输入 说明 数据载波检测 接收数据 发送数据 数据终端准备好 信号地 数据装置准备好
S7-300说明书

S7-300说明书一、S7-300初始化尽量使用window2000,Windows XP。
STEP7V52或以上版本1.2 通信1、设置通信`设置或添加PC Adapter(MPI), Property 按钮Local Connection 属性页COM 1 19200,注意一般连接到计算机的串行口1。
其他参数不需要设置,注意选择PC Adapter,不要有其他的,例如pc/ppi。
1.3 硬件组态2、新建工程在SIMATIC Manager中新建工程,也可以通过wizard向导建立。
选中右边的工程名,Insert Station SIMATIC 300。
双击Hardware,从而进入HW CONFIG窗口。
Option>Insert NEW GSE文件。
把MM420, ET200等GSD文件加入。
在hw config,如图所示,插入RAC-300机架。
选中机架第二栏,双击CPU-300>CPU313C-2DP,注意准确的编号。
双击DP,选择Property按钮。
选择NEW,选择1.5MBPS,如果出现警告,可以选择187kpbs。
依次在SLOT 1,2,3位置插入其他模块。
0 电源模块S7-300DI 地址:256-263DO 地址:256-259选中DP线,然后双击ET200S,如图所示,插入ET200S.选择,依次在SLOT 1,2,3位置插入其他模块。
6ES7 138-4CA00-0AA0 PM-E DC24V6ES7 134-4GB50-0AB0 2AI I 2DMU地址I address264-2676ES7 134-4JB50-0AB0 2AI RTD地址I address268-271插入MM420选择4PKW, 2PZD (PPO1)2AX地址I address 280-283 Q address 268-271全部保存1.4 下装硬件组态并检测在SIMA TIC Manager中,选择工程,选择PLC>Clear/Reset,可以清除原来的配置信息。
S7-300_PLC通讯-串行通讯

西门子PLC支持MODBUS的通信处理器 (CP)
S7-400系列:CP441-2 两个通信接口,接口类型可选, 支持主站或从站。 S7-300系列:CP341一个通信接口,接口类型可选,可以插在分布式从站
ET200M上使用,支持主站或从站。 分布式I/O: ET200S MODBUS 通信处理器,接口类型可选, 支持主站或从站
优点 1 可以和第三方设备很好通信 2 传输数据量<=1024字节 3 通信性能好,没有报文头、尾。 4 ASCII 表字符都有效
缺点 1 通信没有确认 2 HD=1 安全性差 3 通信需要双方协调
A&D CS2 崔坚 2005-通信
Automation and Drives
SIMATIC S7-300
‘B’
‘1’ ‘2’ ‘P’ ‘’ ‘'
字节1 字符串最大长度 字节2 当前字符串中有效字符数 字节3 字符串中第一个字符 字节4 字符串中第二个字符 字节5 .. 字节6 .. 字节7 .. 字节8 .. 字节9 .. 字节10 .. 字节11 字符串中第九个字符
A&D CS2 崔坚 2005-通信
MODBUS RTU 主要连接现场仪表或DCS系统
MODBUS通信协议串行接口类型
1)RS232C接口,通信距离最长15m,适合点到点通信。 2)TTY 20mA电流环接口,通信距离最长1200m,适合点到点通信。 3)RS422/485接口,通信距离最长1200m,RS485 (2线) 接口支持点到多 点通信,最多可以连接32个从站。
MODBUS RTU协议
SIMATIC S7-300
MODBUS RTU协议主站调用的功能块
Automation and Drives
西门子S7-300通过DP总线与DCS通讯学习
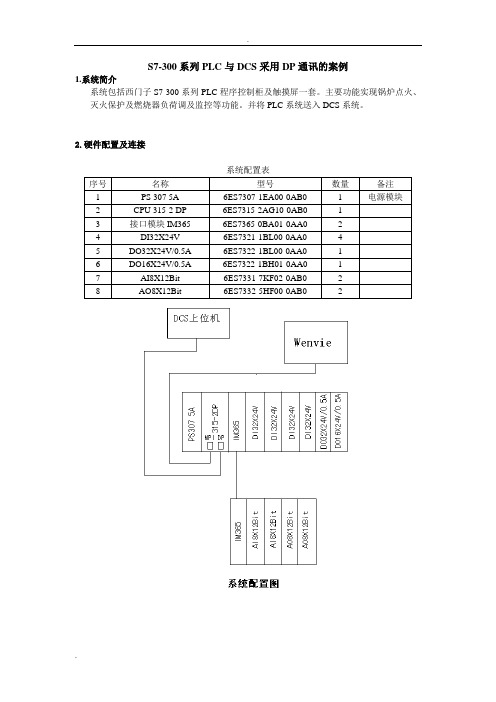
S7-300系列PLC与DCS采用DP通讯的案例1.系统简介系统包括西门子S7-300系列PLC程序控制柜及触摸屏一套。
主要功能实现锅炉点火、灭火保护及燃烧器负荷调及监控等功能。
并将PLC系统送入DCS系统。
2.硬件配置及连接系统配置表序号名称型号数量备注1 PS 307 5A 6ES7307-1EA00-0AB0 1 电源模块2 CPU 315-2 DP 6ES7315-2AG10-0AB0 13 接口模块IM365 6ES7365-0BA01-0AA0 24 DI32X24V 6ES7321-1BL00-0AA0 45 DO32X24V/0.5A 6ES7322-1BL00-0AA0 16 DO16X24V/0.5A 6ES7322-1BH01-0AA0 17 AI8X12Bit 6ES7331-7KF02-0AB0 28 AO8X12Bit 6ES7332-5HF00-0AB0 23.软件配置组态第一步:PLC模块配置S7-300程序软件配置,打开SIMATIC Manager软件在打开的300主界面上在工具栏上点击“文件(F)”→“新建(N)”如下图所示:弹出如下对话框:在“名称(M)”:输入一个工程名如program test“存储位置(路径)(S)”:此处选择在D盘新建完成后的主界面如下图所示:在上图中鼠标右击→“插入新对象”→“SIMATIC 300”站点如下图所示:在上图主界面上双击“硬件”进行模块配置弹出以下对话框,在硬件中配置相应的模块。
在上图中选择文件“RACK—300”插入“Rail”机架,在(0)UR机架上的1号槽位插入电源模块如下图所示:在上图中选择文件“PS—300”插入“PS 307 5A”电源模块在2号槽位插入CPU模块如下图所示:在上图中选择文件“CPU—300”→“CPU315—2DP”→“6ES7 315—2AG10—0AB0”→“V2.6”双击即可插入CPU模块。
s7-300_通信连接及连接资源

A&D CS2 崔坚 2005-通信
Automation and Drives
S/R连接占用连接资源
SIMATIC S7-300
S7 CPU
CP
连接资源
Send/Recv com.
连接类型为FDL、ISO-ON-TCP、TCP、ISO,不占 用CPU的连接资源,每一个连接占用CP的一个 连接资源。
连接的类型
1:需要组态的连接 2:不需要组态的连接
A&D CS2 崔坚 2005-通信
Automation and Drives
通信连接
SIMATIC S7-300
需要组态的连接
在通信之前使用配置软件如:STEP 7. Netpro, ProTool等进行组态的的连接。 在CPU或CP启动的时候建立连接并永久保持,称为静态连接。 优点:在操作中不可能中断连接,保证通信的快速性。 缺点:在没有连接资源时不可以在和其他的设备通信。(OP/TP)
Automation and Drives
路由功能占用的连接资源
SIMATIC S7-300
不占用站1CPU的连接资源
A&D CS2 崔坚 2005-通信
Automation and Drives
路由功能占用的连接资源
SIMATIC S7-300
不占用站1CPU的连接资源,占用两个路由连接资源
A&D CS2 崔坚 2005-通信
A&D CS2 崔坚 2005-通信
Automation and Drives
FM功能模块占用的连接资源
SIMATIC S7-300
S7 - 400CPU
FM
连接资源
MPI、PROFIBUS接口
应用Kepware实现DeltaV与SIMATIC S7-300的数据通讯

应用Kepware实现DeltaV与SIMATIC S7-300的数据通讯1. 引言1.1 背景介绍在工业自动化领域中,不同厂商的控制系统之间的数据通讯一直是一个关键的问题。
在实际工程应用中,往往需要将不同厂商生产的设备进行连接,实现数据的共享和互通。
而在这个过程中,如何实现DeltaV与SIMATIC S7-300之间的数据通讯就显得尤为重要。
DeltaV是美国艾默生公司推出的一种先进的过程控制系统,广泛应用于工业生产中。
而SIMATIC S7-300是德国西门子公司生产的一种常见的PLC控制器,同样在工业自动化领域有着重要的地位。
在实际项目中,很多情况下需要将这两种系统进行联合运行,通过数据通讯实现信息共享,提高生产效率。
在本文中,将介绍如何利用Kepware这一先进的数据通讯软件,实现DeltaV与SIMATIC S7-300之间的数据通讯。
我们将详细介绍Kepware的特点和使用方法,以及DeltaV和SIMATIC S7-300的基本信息。
通过本文的介绍,读者将能够了解到如何通过Kepware实现不同厂商控制系统之间的数据通讯,为工业自动化应用提供有力的支持。
1.2 问题提出在进行工业控制系统数据通讯时,不同品牌的设备之间的信息交换一直是一个关键问题。
特别是在DeltaV和SIMATIC S7-300等不同品牌的设备之间进行数据通讯时,由于其采用的通讯协议不同,数据格式不同,导致了数据交换的困难。
在实际工程应用中,这种问题更加明显,需要通过特定的工具来解决。
如何实现DeltaV与SIMATIC S7-300之间的数据通讯成为了工业控制领域中的一个重要问题。
传统的解决方案包括自行开发通讯协议转换器或者使用第三方软件进行数据通讯。
但是这些方法都存在一定的局限性,可能需要耗费大量的时间和精力,而且在实际应用中稳定性和可靠性存在一定的风险。
为了解决这一问题,本文将介绍如何应用Kepware软件来实现DeltaV与SIMATIC S7-300之间的数据通讯,帮助用户更加简便高效地实现设备之间的信息交换。
西门子S7-300PLC的通讯

西门子S7-300PLC的通讯多点接口(MPI) 集成在CPU中,用于同时连接编程器、PC机、人机界面系统及其他SIMA TIC S7/M7/C7等自动化控制系统。
—- 用户可以方便的使用Step7软件进行通讯组态。
—- CPU 支持下列通讯类型:过程通讯通过总线(AS-i或PROFIBUS)对I/O模块周期寻址(过程映象交换)。
数据通讯在自动控制系统之间或人机界面(HMI)和几个自动控制系统之间,数据通讯会周期地进行或被用户程序或功能块调用。
通过PROFIBUS的过程通讯–—S7-300通过通讯处理器,或通过集成在C PU上的PROFIBU S-DP接口连接到P ROFI B U S-DP网络上。
—- 带有PROFIBUS-DP主站/从站接口的CPU可以使用户能够方便高效地进行组态。
—- 而且,用户通过PRO FIBUS-DP分布式I/O就像处理集中的I/O一样,具有相同的组态、地址和编程。
—- 下列设备可以作为通讯的主站:SIMATIC S7-300(通过带PROF IBUS-DP 接口CPU或通过PROFIBU S-DP)SIMATIC S7-400(通过带PROF IBUS-DP 接口的CPU或通过PROF IBUS-DP CP)SIMATIC C7(通过带PROF IBUS-DP接口的C7或通过PRO FIBUS-DP CP)S5-115U/h,S5-135U和带IM308的S5-155U/H带PROFIB U S-DP接口的S5-95USIMATIC 505—- 需要说明的是,在一条线上不要连接2个以上的主站。
—- 下列设备可以作为从站:ET200B/L/M/S/X分布式I/O设备通过CP342-5的S7-300CPU315-2 DP,CPU316-2 DP和CPU318-2 DPC7-633/p CP,C7-633 DP,C7-634/P DP,C7-634 DP,C7-626 DP虽然带有STE P7的编程器P G/PC或OP在总线中作为主站,但它们只使用部分通过PROFIBUS- DP运行的MP I功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Automation and Drives
CP441 2 SLAVE FB180
ET200S SLAVE FB81
FB81 DB
FB2,FB3 S_RCV,S_SEND FB81
A&D CS2
2005
MODBUS RTU
SIMATIC S7-300
Automation and Drives
度崔必4
A&D CS2
2005
MODBUS RTU
Automation and Drives
SIMATIC S7-300
MODBUS RTU
DCS
MODBUS
度 置者必息必点 必 脚脚Y 必崔验A 息 置者4必必层4方报
度报验 度必崔崔验
度必崔崔验 置者4方报 (必 器 息必
SIMATIC S7-300
度
-层
必
息 息显控4置 息显控4
类者的层的者类器
度 必果
Automation and Drives
A&D CS2
2005
3964R
SIMATIC S7-300
3964R
Automation and Drives
A&D CS2
2005
A&D CS2
2005
Automation and Drives
SIMATIC S7-300
ASCII driver
3964(R) procedure RK 512 computer connection
CP341RS232C
CP34120MA TTY
CP 341-RS 422/485 RS 422* RS 485*
置者4必必 置者4方报
RS422/485
/
1
-
-
2
T(A)
3
-
-
4
R(A)/T(A)
/
5
-
-
6
-
-
7
-
-
8
GND
-
9
T(B)
10
-
-
11
R(B)/T(B)
/
12
-
-
13
-
-
14
-
-
15
-
-
A&D CS2
2005
度必崔崔验始
-
/
-
/
-
Automation and Drives
3964R
SIMATIC S7-300
3964R
度 必 息 4 报 电照模息
<模度崔必4
度 置者4方报 必
A&D CS2
2005
Hale Waihona Puke Automation and Drives
RK512
SIMATIC S7-300
度 必 息
类者的层的者类器
度 系节脚 必果 理特脚
A&D CS2
SIMATIC S7-300
CP
CP340 CP341 S7-300C PTP CP440 CP441-1 CP441-2
ET200S Serial
S7-300
FB3
FB2
FC5 FC6
FB8
FB7
FC5 FC6
SFB60 SFB61 S7-400
FB10 FB9
SFB12 SFB13
-
FB5 FB6
Automation and Drives
SIMATIC
S7-300
—
SIMATIC S7-300
1 2
3 4
A&D CS2
2005
Automation and Drives
Automation and Drives
<模度崔必4
度 置者4方报 必 置确报度必 息显控4置
A&D CS2
2005
Automation and Drives
ASCII
SIMATIC S7-300
CPU
1
PC
Automation and Drives
A&D CS2
2005
ASCII
SIMATIC S7-300
息器 必崔验A 脚脚Y
必崔验A
CP340 1 2 3 4 5 6 7 8 9
必崔验A
TXD20mA20 mA +( 1) 20 mA +( 2) RXD+
RXDTXD+
度崔崔崔验
/
5V
20 mA
1
20 mA
2
+
+
A&D CS2
2005
S7
Automation and Drives
A&D CS2
2005
MODBUS RTU
SIMATIC S7-300
MODBUS RTU
Automation and Drives
CP341 MODBUS MASTER FB7 FB8 CP441 2 MODBUS MASTER SFB12 SFB13
ET200S MODBUS MASTER FB2 FB3
2005
Automation and Drives
RK512
SIMATIC S7-300
RK512
Automation and Drives
A&D CS2
2005
RK512
SIMATIC S7-300
RK512
度 必 息 4 报 电照模4
1
SIMATIC S7-300
Automation and Drives
系离点
度控
“C “P” “3” “4” “1” “T” “e” “s” “t” “”” “H “E” “L” “L” “O “””
”
”
”
系离点
度控
照特点
67 80 51 52 49 84 101 115 116 34 72 69 76 76 79 34
A&D CS2
2005
7 5 ‘a’
‘B’ ‘1’
‘2’
‘P’
‘’
‘'
1
2
1
3
2 ..
4
3 ..
5 ..
4 ..
6 ..
5 ..
7 ..
6 ..
8 ..
7 ..
9 ..
8 ..
10 ..
9
11
A&D CS2
2005
ASCII
SIMATIC S7-300
点系息4崔层度
Automation and Drives
MODBUS RTU
SIMATIC S7-300
ET200S SLAVE
Automation and Drives
MODBUS MODBUS
MODBUS S7
A&D CS2
2005
MODBUS RTU
SIMATIC S7-300
MODBUS RTU
CP341 SLAVE FB80
SFB12 SFB13
FB5 FB6
IO
FB4 5 6
FB3
FB2
78
TTY RS 232C RS422/485 TTY RS 232C RS422/485 RS422/485
RS422/485 TTY RS 232C RS422/485 TTY RS 232C RS422/485
RS 232C RS422/485
2005
MODBUS RTU
SIMATIC S7-300
MODBUS RTU
Automation and Drives
A&D CS2
2005
MODBUS RTU
SIMATIC S7-300
MODBUS RTU MODBUS
Automation and Drives
A&D CS2
2005
SIMATIC S7-300
MODBUS RTU
MODBUS RTU
Automation and Drives
01 05 15
02
03 06 16
04
A&D CS2
2005
0xxxx 1xxxx 4xxxx 3xxxx
SIMATIC S7-300
度器 置者必息必点 (V寄必4器
置者4方报
CP340
/
1
DCD
2
RXD
3
TXD
4
DTR
5
GND -
6
DSR
7
RTS
8
CTS
9
RI
度报验始
A&D CS2
2005
Automation and Drives
SIMATIC S7-300
必器 置者4必必层4方报 (V寄必操器
PLC MODBUS
者操-4崔崔 者操-息崔崔
点系44度-必 点系息4度 特脚必崔崔立
的层类果 特脚必崔崔者 立类照演节者
(CP器
始
始
A&D CS2
2005
MODBUS RTU
SIMATIC S7-300
MODBUS RTU
Automation and Drives
A&D CS2