振弦式传感器 (2)
振弦式传感器的工作原理及其特点

振弦式传感器(String Vibration Sensor)是一种常见的机械振动测量装置,广泛应用于工程领域的振动监测和控制中。
本文将介绍振弦式传感器的工作原理及其特点。
一、工作原理振弦式传感器的工作原理基于维纳-弗洛伊德方程(Wien-Floquet-Equation),即将传感器的振弦进行理论分析,其中振弦是一个由弹性材料制成的细长线性结构。
当振弦受到外部机械振动作用时,会引起它的振动,传感器通过测量振动的频率、振幅和相位等参数,来确定外部振动的强度和频率。
振弦式传感器通常由振弦、固定支承和传感器电子模块组成。
振弦的两端固定在支承上,当受到外部振动力作用时,振弦会发生弯曲振动或拉伸振动。
传感器电子模块通过电极对振弦进行振动信号的采集和分析,将振动信号转化为电信号输出,完成对振动信号的测量。
二、特点1.高精度测量:振弦式传感器采用先进的振动信号处理技术,能够实现高精度的振动测量。
传感器对振动信号的测量范围广,能够捕捉到微小的振动变化。
2.宽频率响应:振弦式传感器具有较宽的频率响应范围,可以测量多种类型振动的频率。
传感器能够满足不同应用场景下的频率要求,适用于多种机械设备的振动监测。
3.快速响应:振弦式传感器响应速度快,可以准确捕捉瞬态振动信号。
传感器具有良好的动态特性,适用于对快速振动变化的监测和控制。
4.稳定可靠:振弦式传感器采用高品质的材料和先进的制造工艺,具有良好的稳定性和可靠性。
传感器在长时间工作中能够保持较高的测量精度,具有较长的使用寿命。
5.易于安装和维护:振弦式传感器安装简便,可以灵活布置在需要监测的位置。
传感器的维护成本低,不需要频繁的校准和调整。
6.多种输出方式:振弦式传感器可以通过模拟信号输出或数字信号输出,方便与其他设备进行数据交互和处理。
传感器具有多种接口选项,适配不同的控制系统和数据采集设备。
7.广泛应用:振弦式传感器广泛应用于机械设备振动监测、故障诊断和预警等领域。
(完整word版)振弦式传感器

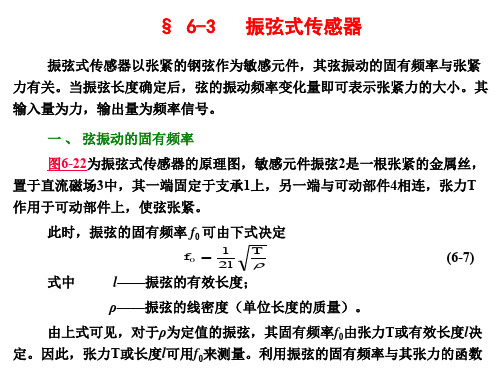
基于振弦式传感器测频系统的设计白泽生(延安大学物理与电子信息学院陕西延安716000)利用振弦式传感器测量物理量是基于其钢弦振动频率随钢丝张力变化,输出的是频率信号,具有抗干扰能力强,对电缆要求低,有利于传输和远程测量的特点。
因此,可获得非常理想的测量效果。
1 振弦式传感器的工作原理振弦式传感器由定位支座、线圈、振弦及封装组成。
振弦式传感器可等效成一个两端固定绷紧的均匀弦,如图1所示。
振弦的振动频率可由以下公式确定:其中S为振弦的横截面积,ρv为弦的体密度(ρv=ρ/s),△l为振弦受张力后的长度增量,E为振弦的弹性模量,σ为振弦所受的应力。
当振弦式传感器确定以后,其振弦的质量m,工作段(即两固定点之间)的长度L,弦的横截面积S,体密度ρv及弹性模量E随之确定,所以,由于待测物理量的作用使得弦长有所变化,而弦长的变化可改变弦的固有振动频率,由于弦长的增量△l与振弦的最长驻波波长的固有频率存在确定的关系,因此只要能测得弦的振动频率就可以测得待测物理量。
2 测频系统的设计2.1 基本原理振弦式传感器工作时由激振电路驱动电磁线圈,当信号的频率和振弦的固有频率相接近时,振弦迅速达到共振状态,振动产生的感应电动势通过检测电路滤波、放大、整形送给单片机,单片机根据接收的信号,通过软件方式反馈给激振电路驱动电磁线圈。
通过反馈,弦能在电磁线圈产生的变化磁场驱动下在本振频率点振动。
当激振信号撤去后,弦由于惯性作用仍然振动。
单片机通过测量感应电动势脉冲周期,即可测得弦的振动频率,最后将所测数据显示出来。
测频原理框图如图2所示。
2.2 系统硬件电路设计根据以上的基本原理和思想,设计的测频系统的整体电路如图3所示。
主要由激振电路、检测电路、单片机控制电路和显示电路等几部分组成。
工作过程是由单片机产生某一频率的激振信号,经放大后激励振弦振动,拾振线圈中产生的感应电动势经几级放大后送给单片机处理,最后送显示电路显示。
2.2.1 激振电路激振电路采用扫频激振技术,就是用一个频率可以调节的信号去激励振弦式传感器的激振线圈,当信号的频率和振弦的固有频率相接近时,振弦能迅速达到共振状态。
振弦式传感器汇总
弦丝的长度↓,l=12~20mm;弦丝的横截面积↑
2020/9/29
第四章 非电量的电测技术
7
2、非线性
振弦式传感器的输出-输入一般为非线性关系,其输 出-输入特性如下图所示。
为了得到线性的输出,可以选取曲线中近似直线的一段。 也可以用两根振弦构成差动式振弦传感器,通过测量两根 振弦的频率差来表示应力,可以大大地减小传感器的温度 误差和非线性误差。
2020/9/29
第四章 非电量的电测技术
8
3、频率稳定性
f
2
1 4l 2
El
vl
K
f
df f
dE E 3 dl 2 2l
振弦长度l和材料弹性模量E受温度的影响直接影响传 感器的频率稳定性,而两者的影响是相反的。
2020/9/29
第四章 非电量的电测技术
9
三、振弦式传感器的应用
1、振弦式混凝土表面应变计
2020/9/29
第四章 非电量的电测技术
11
2020/9/29
第四章 非电量的电测技术
3
1、间歇激发 当振荡器给出激励脉冲,继电器吸合,电流通过磁铁线
圈,使磁铁吸住振弦。脉冲停止后松开振弦,振弦便自 由振动,在线圈中产生感应电动势经继电器常闭接点输 出。感应电动势的频率即为振弦的固有频率,通过测量 感应电动势的频率即可测量振弦张力的大小。
(三)部件性能对传感器性能的影响
振弦 电磁铁 弦的夹紧件
2020/9/29
第四章 非电量的电测技术
6
二、传感器的特性分析
1、灵敏度
1 El f=
2l vl
2 fdf Kd
f
振弦式传感器解析PPT课件

8.2.1 工作原理 8.2.2 激振装置 8.2.3 振弦传感器的误差 8.2.4 振弦式传感器应用
返回
下一页
2020年9月28日
2
概述
✓ 振弦式传感器具有良好的测量特性,它可以做到小于0.1% 的非线性特性,0.05%的灵敏度和小于0.01%/℃的温度误差。
✓ 此外,传感器的结构和测量电路都比较简单。 ✓ 广泛应用于精密的压力、力、扭矩等测量中。
返回
上一页
下一页
2020年9月28日
12
✓ 从式(8.2.10),取f对ε的微分,则得
df 1 E E d 4l E 8l2f
(8.2.11)
✓ 式(8.2.11)为振弦的应变灵敏度表达式。
返回
上一页
下一页
2020年9月28日
13
88..23..22 激扭振矩装测置量原理
✓ 振弦振动有强迫振动、自由振动和自激振动三种方式。 ✓ 图8.2.2给出了振弦传感器在自激振动状态下的两种激励方
✓ 此时,振弦所感受的力为: FBlei。
✓ 它可以分为两部分:一部分Fc用来克服弦的质量m的惯性, 使它获得运动速度v;另一部分FL用来克服振弦作为一个 横向弹性元件的弹性力。
返回
上一页
下一页
2020年9月28日
7
✓ 据此,可以写出
Fc
Belic
md
dt
(8.2.1)
Bleicdt m
(8.2.2)
2020年9月28日
15
✓ 振弦的等效LC谐振回路作为整个振荡电路中的正反馈网 络,由于振弦对于它的固有振动频率有着非常尖锐的阻 抗特性,电路只在其信号频率等于振弦的固有振动频率 时才能达到振荡条件。
8.2振弦式传感器

✓ 综上所述,无论是磁电式变换器,还是电磁式变换器, 电路输出信号频率与作用力的大小有关,可以通过测量 输出信号的频率来测量作用力。
返回
上一页
下一页
88..22..33 振振弦弦传传感感器器的的误误差差
✓ 因此,电路的输出信号频率就严格地控制在振弦的固有 振动频率,而与作用力的大小有关。这样,就可以通过 测量输出信号的频率来测量力、压力、扭矩变形等。
✓ 图8.2.1(b)中的R1、R2和场效应管组成负反馈网络, 起着控制起振条件和振荡幅度的作用,而R4、R5、VD和 C控制场效应管的栅极电压,作为稳定输出信号幅值之用。
返回
上一页
下一页
✓ 根据以下三式
d
dt
, e Ble ,和 FL Bl ie L
可得
e Ble
d
dt
Ble k
dFL dt
B2le2 k
diL dt
式中,iL为对应于力FL的电流。
(8.2.6)
返回
上一页
下一页
✓ 由式(8.2.6)可以看出,振弦的弹簧作用相当于电路中
的电感,其等效电感为
振荡放大电路组成。金属弦承受着拉力,并且根据不同 的拉力大小和不同长度有着不同的固有振荡频率。 ✓ 改变拉力的大小可以得到相应的振弦固有振荡频率的变 化。 ✓ 在图8.2.1(b)中,它可以等效为一个并联的LC回路。
返回
上一页
下一页
✓ 由于振弦的Q值很高,电路只有在振弦的固有振动频率上 才能满足振荡条件。
返回
上一页
下一页
6-3节 振弦式传感器
§6-3 振弦式传感器
设在时间 t = tx 时振弦偏离初始平横位置为δ,则其弹性反作用力 Fe 为
式中 由于
Fe=kδ
k——振弦的横向刚度系数。
d
dt
v,e Blv, Fe
Blie
, 则反电势为
e Bl d (Bl )2 die
dt k dt
(6-12) (6-13)
弦的应力不能太大或太小,太小会影响传感器的稳定性,不容易起振; 太大则又可能超过弦的屈服点,使弦产生较大的松弛,影响传感器的精度。由 于弦质量不可能完全均匀,因此使用时对弦的抗拉强度应考虑一定的安全系数。
另外,除正确地选择振弦的材料及几何尺寸外,还必须进行适当的应力 及热老化处理。实验表明,一根未经热处理的弦在长期的高应力拉伸下,会逐 渐松弛,并在高应力、高温度情况下会加速松弛的过程。当弦经过高应力和热 老化处理后,松弛过程基本上可消除。
此时,振弦的固有频率 f0 可由下式决定
f0
1 2l
T
式中
l——振弦的有效长度;
(6-7)
ρ——振弦的线密度(单位长度的质量)。
由上式可见,对于ρ为定值的振弦,其固有频率f0由张力T或有效长度l决 定。因此,张力T或长度l可用f0来测量。利用振弦的固有频率与其张力的函数
§6-3 振弦式传感器
关系,可以作成压力、力、力矩或加速度传感器;利用振弦的固有频率与其 长度l的函数关系,可以作成温度式、位移式传感器。
§ 6-3 振弦式传感器
振弦式传感器以张紧的钢弦作为敏感元件,其弦振动的固有频率与张紧 力有关。当振弦长度确定后,弦的振动频率变化量即可表示张紧力的大小。其 输入量为力,输出量为频率信号。
振弦式传感器的原理及校准方法

基本误差 ( %FS) 三个循环各 点平均值 R i
962012 915110 868214 821211 774310 750816 738915 727210 715511 703618 680016 632911 585415 538210 491114
第二循环上 、 下 两行程平均值
962010 915018 868213 821119 774310 750816 738916 727119 715511 703618 680011 632819 585419 538118 491110
N N N
C0 N + C1
N
i =1
∑
R i + C2
N
i =1
∑
R2 i =
N
i =1
φ ∑
i
N
BN +
N
i =1
∑
Ri =
N
i =1
φi ∑
N
C0
i =1
∑
N
R i + C1 R i + C1
2
i =1 N
∑
R i + C2 R i + C2
3
2
i =1 N
∑
Ri = Ri =
4
3
i =1 N
励 ,一个线圈接收 。图 1 是振弦式倾角测量仪的传 感器结构图 ,采用的是单线圈激励方式 ,当倾角变化 时 ,下垂重块发生摆动 ,振动钢弦内部的应力也发生 了改变 ,根据式 ( 1 ) 则输出频率也发生了变化 , 再与 二次仪表钢弦频率测定仪配合即可读出振动频率 值 。假设下垂重块的摆动角度为 φ ,角度 φ 与钢弦 的拉力 p 之间有转换关系 ,简化考虑成一次线性关 系 ,引入系数 k ,将式 ( 1) 变换 ,得到式 ( 2 ) ,其中 : f 0 为初始角对应的频率值 。
振弦式传感器的工作原理及其特点
60年代起,先后研制开发了适合各种测试目的的多种振弦传感器的系列产品,如振弦式压力计、土压力计、空隙水压力计、应变计、测力(应力)计、钢筋计、扭力计、位移计、反力计、吊重负荷计、倾斜计等等。
它们广泛应用于港口工程、土木建筑、道路桥梁、矿山冶金、机械船舶、水库大坝、地基基础等测试,已成为工程、科研中一种不可缺少的测试手段,显示出了其广阔应用和发展的前景。
2.工作原理振弦式传感器由受力弹性形变外壳(或膜片)、钢弦、紧固夹头、激振和接收线圈等组成。
钢弦自振频率与张紧力的大小有关,在振弦几何尺寸确定之后,振弦振动频率的变化量,即可表征受力的大小。
现以双线圈连续等幅振动的激振方式,来表述振弦式传感器的工作原理。
如图丨所示,工作时开启电源,线圈带电激励钢弦振动,钢弦振动后在磁场中切割磁力线,所产生的感应电势由接收线圈送入放大器放大输出,同时将输出信号的一部分反馈到激励线圈,保持钢弦的振动,这样不断地反馈循环,加上电路的稳幅措施,使钢弦达到电路所保持的等幅、连续的振动,然后输出的与钢弦张力有关的频率信号。
接收贱圈输止團]掘弦旬割S器工作原理團(连鮭超D振弦这种等幅连续振动的工作状态,符合柔软无阻尼微振动的条件,振弦的振动频率可由下式确疋;L --- 钢弦的有效长度i p 一-钢弦材料密度;(T 0——钢弦上的初始应力。
由于钢弦的质量m长度L、截面积S、弹性模量E可视为常数,因此,钢弦的应力与输出频率f 0 建立了相应的关系。
当外力F未施加时,则钢弦按初始应力作稳幅振动,输出初频 f 0 ;当施加外力(即被测力——应力或压力)时,则形变壳体(或膜片)发生相应的拉伸或压缩,使钢弦的应力增加或减少,这时初频也随之增加或减少。
因此,只要测得振弦频率值f,即可得到相应被测的受力壳体钢弦式中,f 0初始频率;力——应力或压力值等。
3.振弦的激振方式振弦式传感器的振弦是钢弦,通过激振产生振动。
振弦激振的方式分为间歇触发激振和等幅连续激振。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4.9.1 工作原理及测量电路 4.9.2 振弦传感器的特性 4.9.3 振弦式传感器的应用
4.9.1 工作原理及测量电路
工作原理
• 振弦式传感器的工作原理可用图4-106说明。由图可见,
在支点与活动支点间拉紧一根长度为l 、质量为m 的细弦,
当细弦受张力
F
作用时,其固有频率
f
m
1 8
3 F
F
1 8
2 F
由上式可见,差动传感器的 线性度得到极大的改善。
图4-110 差动振弦传感器
• 频率稳定性
环境温度的变化是频率稳定性的主要影响因素。由式(4-
127)可知,体积密度 v 以及由F 引起的l 不随环境温度
变化。对式(4-127)两边取对数再微分得:
f
df f
dE E 3 dl 2 2l
• 非线性误差
设被测张力为 F0时初始频率为f0,被测张力为F1 F0 F 时 振动频率为 f1,则:
f1
1 2
F0 F 1 ml 2
F0 ml
1 F F0
f0
1 F F0
f0
1
1 F f0 (1 F ) 2
F2
F0
ห้องสมุดไป่ตู้
f1
F时
f0 (1
1 2
F
1 8
2 F
1 16
3 F
)
f2
• 由于简单振弦式传感器非线性严重,常用差动振弦式压力 传感器,其原理示意图见图4-110。
图4-110 差动振弦传感器
Do you have made a progress today ?
f0 (1
1 2
F
1 8
2 F
1 16
3 F
)
其二次方非线性误差为:
m
由上式可见, F愈大, m愈大。
1 8
f
0
2 F
1 2
f0 F
1 4
F
图4-109 输入输出特性
• 为改善非线性,常采用差动振弦传感器,见图4-110。
f
f1
f2
f0 ( F
1 8
3 F
)
于是可得其三次方非线性误差为:
为:
f
1
F
2 ml
f 1 ESl 1 El
2l l 2l vl
f (F)
传感器的振荡频率 f 与弦 图4-106 振弦式传感器的工作原理 所受张力F成单值函数关系。
弦的激发方式及测量电路
弦的激发方式有间歇激发和连续激发两种。 1.间歇激发及测量电路 间歇激发及测量电路见图4-107。
图4-107 间歇激发及测量电路 a)间歇激发及测量电路 b)振荡信号的波形
2.连续激发及测量电路 为了克服间歇激发振荡幅值逐渐减小 的缺点,可采用连续激发方式,其原理见图4-108。
图4-108 连续激发及测量电路 a)连续激发结构示意图 b)测量电路
4.9.2 振弦传感器的特性
• 灵敏度
式(4-126) 两边平方
f
2
1 4l 2
El
vl
K
2 fdf Kd
k df K
d 2 f
材料系数K
K 1 E ES
4l 2 v 4l 2
l
l
• 由上式可见,灵敏度k 与材料系数K 成正比,而与弦的振 动频率成反比。材料系数K与材料的材质和几何尺寸有关, 减小弦丝的长度和增加弦丝的横截面积是提高灵敏度行之 有效的方法。但是弦丝长度 l 不能太短,一般 l 12 ~ 20mm 为宜,或l / d 300 ~ 500,其中d 为弦丝的直径。
由上式可见,振弦的长度 和材料弹性模量 受温度的影响 直接影响传感器的稳定性,而两者的影响是相反的。
4.9.3 振弦式传感器的应用
• 除了振弦式传感器外,还有振筒式、振梁式和振膜式等传 感器,它们统称为谐振式传感器。它们的工作原理与特性 相似或相同,是20世纪70年代发展起来的。由于是频率式 传感器,频率测量的精度最高(可达10-13数量级),由 此成为最有发展前途的传感技术之一。它们被广泛应用于 测量机械扭矩、振动、位移、速度、加速度、力、应力、 压力、流体流量以及成分分析等。由于篇幅所限,仅介绍 振弦式压力传感器。