c8串口
谱泰通信科技PTC08串口摄像头使用说明书
PTC08Revision 1.02Sep 20 ,2009Putal目录1 PTC08PTC08 Serial Camera Introduction (3) (3)2.Key performance indicators (4)3.camera interface description4.Camera protocol (7) (7)4.1Reset Command (7)4.2Camera instruction4.3Reading the film images length instruction (7) (7)4.4Reading the film images data instructions (7)4.5Stop taking commands4.6Instruction Set camera picture compression (7) (7)4.7Set the camera image size command (7)4.8Power down state command (7)4.9Modify the serial port speed command (8)4.10 PTC08camera power initialization process (8)5.Field of application1 PTC08串口摄像头简介This product's default baud rate is 38400, and other optional Baud rate 9600, 19200, 57600,1152002.主要性能指标FeatureParameter32mm x 32mm CMOS 1/4i n c h 30万 5.6um*5.6um Standard JPEG/M-JPEG Automatic Automatic Automatic Electronic rolling shutter 45DB 60DB 16DB640*480 30fps Progressive scan 120 degrees 10meters, maximum 15meters (adjustable)VGA(640*480),QVGA(320*240), QQVGA(160*120) Optional Default 38400 ,Maximum 115200 75mA DC +5VRS232 (Three wire TX ,RX,GND)PTC08 is the design of Guangzhou Communications Technology Co., Ltd. Thai design and produc-tion. It is a camera module that can perform image capture, capture control, data compression, serial transmission used for industrial image capture. It has a built-in high-performance digitalsignal processing chip that can perform a high proportion of the original image compression. Prod-uct image output uses the standard JPEG format, and is easily compatible with various image processing management software. Standard three-wire RS-232 communication interface and a simple image transmission protocol enables the camera can be easily implemented.Optionally, the camera can be fitted with infrared lights and filters so that it can be used in any lighting conditionModule sizeImage sensorMegapixelsPixel sizeOutput formatWhite balanceExposureGainShutterSNRDynamic rangeMax Analog gain Frame speedScan modeViewing angleMonitoring distanceImage sizeNight vision (IR)Baud rate Current draw Operating voltage Communication3. 摄像头接口说明PTC08串口摄像头模块分为模块本体和串口连接线两部分。
单片机串口通信奇偶校验

单片机串口通信奇偶校验串口通信是单片机与外部设备进行数据交互的一种常见方式。
在串口通信中,为了保证数据的可靠传输,常常会使用奇偶校验来检测和纠正数据传输中的错误。
本文将介绍串口通信的基本原理、奇偶校验的作用和实现方法。
一、串口通信的基本原理串口通信是通过串行传输方式实现数据的发送和接收。
在单片机中,串口通信常用的接口有UART(通用异步收发传输器)和USART (通用同步异步收发传输器)。
这两种接口在硬件上的实现方式不同,但在数据通信的原理上是相似的。
串口通信中的数据是按照位的顺序逐个传输的。
发送端将数据从高位到低位依次发送出去,接收端则按照相同的顺序接收数据。
为了确保数据的可靠传输,通常会在数据的最后添加一个校验位,用来检测数据传输过程中是否出现错误。
二、奇偶校验的作用奇偶校验是一种简单有效的错误检测方法。
在奇偶校验中,发送端会根据数据的位数和奇偶性,在数据的最后添加一个校验位。
接收端在接收到数据后,会重新计算校验位,并与接收到的校验位进行比较,从而判断数据是否传输正确。
奇偶校验的原理是:发送端根据数据的位数和奇偶性计算出校验位,使得数据和校验位中1的个数为奇数或偶数。
接收端在接收到数据后,重新计算校验位,如果计算结果与接收到的校验位一致,则认为数据传输正确;如果计算结果与接收到的校验位不一致,则认为数据传输错误。
三、奇偶校验的实现方法奇偶校验的实现方法主要有两种:奇校验和偶校验。
1. 奇校验:发送端根据数据的位数和奇偶性计算出校验位,使得数据和校验位中1的个数为奇数。
接收端在接收到数据后,重新计算校验位,如果计算结果与接收到的校验位一致,则认为数据传输正确;如果计算结果与接收到的校验位不一致,则认为数据传输错误。
2. 偶校验:发送端根据数据的位数和奇偶性计算出校验位,使得数据和校验位中1的个数为偶数。
接收端在接收到数据后,重新计算校验位,如果计算结果与接收到的校验位一致,则认为数据传输正确;如果计算结果与接收到的校验位不一致,则认为数据传输错误。
STM32L051C8T6HALDMAIDLE串口不定长接收遇到的问题
STM32L051C8T6HALDMAIDLE串⼝不定长接收遇到的问题DMA中断,串⼝不定长接收,⽆法连续发送第⼆个printf写2个printf只能发送第⼀个,第⼆个需要延时5S左右才能发送。
⽆法把串⼝状态置为READY初始化的时候 Main.c要使能串⼝中断 DMA``HAL_NVIC_EnableIRQ(DMA1_Channel2_3_IRQn);HAL_UART_Receive_DMA(&huart1, artDMA_rxBuf, USART1_MAX_RECV_LEN);__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE);``HAL 串⼝库.c添加串⼝发送完毕状态/**@brief DMA UART transmit process complete callback.@param hdma DMA handle.@retval None*/static void UART_DMATransmitCplt(DMA_HandleTypeDef *hdma){UART_HandleTypeDef *huart = (UART_HandleTypeDef *)(hdma->Parent);/* DMA Normal mode */if (HAL_IS_BIT_CLR(hdma->Instance->CCR, DMA_CCR_CIRC)){huart->TxXferCount = 0U;/* Disable the DMA transfer for transmit request by resetting the DMAT bitin the UART CR3 register */CLEAR_BIT(huart->Instance->CR3, USART_CR3_DMAT);/* Enable the UART Transmit Complete Interrupt */SET_BIT(huart->Instance->CR1, USART_CR1_TCIE);/* Check if a transmit process is ongoing or not */if(huart->gState == HAL_UART_STATE_BUSY_TX_RX){huart->gState = HAL_UART_STATE_BUSY_RX;}else{huart->gState = HAL_UART_STATE_READY;}}/* DMA Circular mode */else{if (USE_HAL_UART_REGISTER_CALLBACKS == 1)/*Call registered Tx complete callback*/huart->TxCpltCallback(huart);else/*Call legacy weak Tx complete callback*/HAL_UART_TxCpltCallback(huart);endif /* USE_HAL_UART_REGISTER_CALLBACKS */}}。
串口 停止位 波形

串口停止位波形
串口的停止位通常用于表示数据传输的结束。
在串口通信中,停止位是一个特殊的位,用于标识数据包的结束。
它通常是一个固定长度的位,用于给接收端提供足够的时间来处理接收到的数据,并准备接收下一个数据包。
在串口通信中,停止位的波形通常是一个持续一定时间的低电平。
具体来说,停止位的长度可以是1位、1.5位或2位,这取决于具体的串口通信协议。
当发送端发送完数据后,它会发送一个停止位,以告知接收端数据传输已经结束。
接收端在接收到停止位后,会等待一段时间,以确保所有数据都已经接收完毕。
然后,接收端会准备接收下一个数据包。
需要注意的是,不同的串口通信协议可能具有不同的停止位长度和波形。
因此,在实际应用中,需要根据具体的协议规范来配置停止位的长度和波形。
c8t6引脚定义

c8t6引脚定义
STM32F103C8T6的引脚定义如下:
•引脚PA0-PA7:GPIO端口A,用于输入输出。
•引脚PB0-PB7:GPIO端口B,用于输入输出。
•引脚PC0-PC7:GPIO端口C,用于输入输出。
•引脚PD0-PD7:GPIO端口D,用于输入输出。
•引脚PE0-PE7:GPIO端口E,用于输入输出。
•引脚PF0-PF7:GPIO端口F,用于输入输出。
•引脚PG0-PG7:GPIO端口G,用于输入输出。
•引脚PH0-PH7:GPIO端口H,用于输入输出。
此外,STM32F103C8T6还具有其他引脚,如BOOT0和BOOT1、JTAG接口、SWD接口等。
具体引脚定义可以通过芯片手册进行查询。
需要注意的是,不同型号的STM32芯片可能具有不同的引脚定义和功能,因此在实际使用中需要参考具体型号的芯片手册进行引脚定义和使用。
C8051F020学习笔记 串口通信
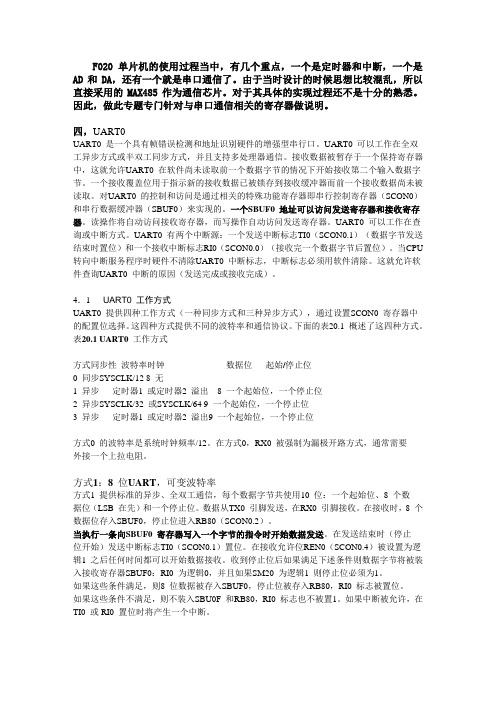
F020单片机的使用过程当中,有几个重点,一个是定时器和中断,一个是AD和DA,还有一个就是串口通信了。
由于当时设计的时候思想比较混乱,所以直接采用的MAX485作为通信芯片。
对于其具体的实现过程还不是十分的熟悉。
因此,做此专题专门针对与串口通信相关的寄存器做说明。
四,UART0UART0 是一个具有帧错误检测和地址识别硬件的增强型串行口。
UART0 可以工作在全双工异步方式或半双工同步方式,并且支持多处理器通信。
接收数据被暂存于一个保持寄存器中,这就允许UART0 在软件尚未读取前一个数据字节的情况下开始接收第二个输入数据字节。
一个接收覆盖位用于指示新的接收数据已被锁存到接收缓冲器而前一个接收数据尚未被读取。
对UART0 的控制和访问是通过相关的特殊功能寄存器即串行控制寄存器(SCON0)和串行数据缓冲器(SBUF0)来实现的。
一个SBUF0 地址可以访问发送寄存器和接收寄存器。
读操作将自动访问接收寄存器,而写操作自动访问发送寄存器。
UART0 可以工作在查询或中断方式。
UART0 有两个中断源:一个发送中断标志TI0(SCON0.1)(数据字节发送结束时置位)和一个接收中断标志RI0(SCON0.0)(接收完一个数据字节后置位)。
当CPU 转向中断服务程序时硬件不清除UART0 中断标志,中断标志必须用软件清除。
这就允许软件查询UART0 中断的原因(发送完成或接收完成)。
4.1UART0 工作方式UART0 提供四种工作方式(一种同步方式和三种异步方式),通过设置SCON0 寄存器中的配置位选择。
这四种方式提供不同的波特率和通信协议。
下面的表20.1 概述了这四种方式。
表20.1 UART0 工作方式方式同步性波特率时钟数据位起始/停止位0 同步SYSCLK/12 8 无1 异步定时器1 或定时器2 溢出8 一个起始位,一个停止位2 异步SYSCLK/32 或SYSCLK/64 9 一个起始位,一个停止位3 异步定时器1 或定时器2 溢出9 一个起始位,一个停止位方式0 的波特率是系统时钟频率/12。
stm32f030c8标准库开发例程

STM32F030C8是STMicroelectronics推出的一款高性能32位微控制器,具有丰富的外设和丰富的通信接口。
在嵌入式系统开发中,STM32F030C8的标准库是非常重要的,可以帮助开发人员更快更方便地进行开发和调试。
本文将介绍如何使用STM32F030C8的标准库进行开发,包括基本的程序编写、编译和下载等方面。
二、准备工作在进行STM32F030C8标准库开发之前,我们需要准备一些必要的工具和环境:1. STM32F030C8开发板:首先需要一块STM32F030C8的开发板,可以选择ST冠方推出的开发板,也可以选择其他厂家的兼容开发板。
2. Keil MDK开发环境:Keil是一款常用的嵌入式系统开发环境,可以帮助开发人员进行程序的编写、编译和下载等工作。
3. STM32CubeMX软件:STM32CubeMX是STMicroelectronics 推出的一款图形化配置工具,可以帮助开发人员快速、方便地进行外设的配置和初始化。
4. STM32标准库:ST冠方提供了STM32标准库,开发人员可以通过STM32CubeMX软件生成对应的标准库代码,并集成到Keil MDK 开发环境中进行开发。
三、创建工程在准备工作完成后,接下来我们需要创建一个新的工程,并进行相应1. 打开STM32CubeMX软件,选择对应的型号(如STM32F030C8),然后进行外设的配置和初始化,包括时钟配置、外部中断配置、引脚配置等。
2. 生成代码:在配置完成后,点击“生成代码”按钮,STM32CubeMX软件将自动生成对应的标准库代码。
3. 导入Keil工程:打开Keil MDK开发环境,在菜单栏选择“Proj ect-Import Project”,选择STM32CubeMX生成的工程目录,导入到Keil MDK中。
四、编写程序在创建工程完成后,接下来我们需要编写程序:1. 打开Keil MDK开发环境,双击打开工程目录中的m本人n.c文件,进行主程序的编写。
基于stm32f103c8t6的串口通信课程设计
标题:基于STM32F103C8T6的串口通信课程设计一、概述在现代电子信息技术领域,嵌入式系统的应用越来越广泛。
而串口通信作为嵌入式系统中常用的通信方式,对于学习嵌入式系统的同学来说是一个非常重要的知识点。
本篇文章将通过STM32F103C8T6作为开发板,具体介绍基于该开发板的串口通信课程设计。
二、STM32F103C8T6开发板简介1. STM32F103C8T6是意法半导体公司推出的一款低功耗、高性能的32位MCU微控制器,采用ARM Cortex-M3内核。
2. 该开发板具有丰富的外设,包括多个通用定时器、串行外设接口、通用同步/异步接收器发射器等,非常适合用于串口通信的课程设计。
三、串口通信基础知识1. 串口通信是一种通过串行传输方式进行数据交换的通信方式,其中包括UART、SPI、I2C等不同的协议。
2. UART是一种通用的异步收发器,适用于点对点通信,其中包括一个发送引脚和一个接收引脚。
3. 在串口通信中,波特率是一个非常重要的参数,用来表示每秒钟传输的位数,常用的波特率包括9600、xxx等。
四、基于STM32F103C8T6的串口通信课程设计1. 课程设计目标:通过本课程设计,学生将掌握STM32F103C8T6开发板的串口通信原理、基本应用和实际开发能力。
2. 课程设计内容:本课程设计将包括串口通信基础知识学习、STM32F103C8T6开发环境搭建、串口通信程序设计等内容。
3. 课程设计步骤:3.1. 串口通信基础知识学习:讲解串口通信的基本原理、工作方式、数据格式等知识点。
3.2. STM32F103C8T6开发环境搭建:介绍如何搭建开发环境,包括Keil、ST-Link驱动的安装与配置。
3.3. 串口通信程序设计:通过实例演示,学生将学习如何在STM32F103C8T6上实现基本的串口通信功能。
3.4. 实际应用案例:引导学生通过实际项目案例,将串口通信运用到具体的应用中,如LED灯控制、温湿度传感器数据的采集等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8.2.3 80C51串行口的工作方式
一、方式0(移位寄存器输入/输出方式) 非串行通信用方式-扩展并行I/O • 用并入串出移位寄存器扩展并行输入口
• 用串入并出移位寄存器扩展并行输出口
RXD 80C51 TXD
P1.0
A B CLK
74LS164
CLR GND
RXD 80C51 TXD
P1.0
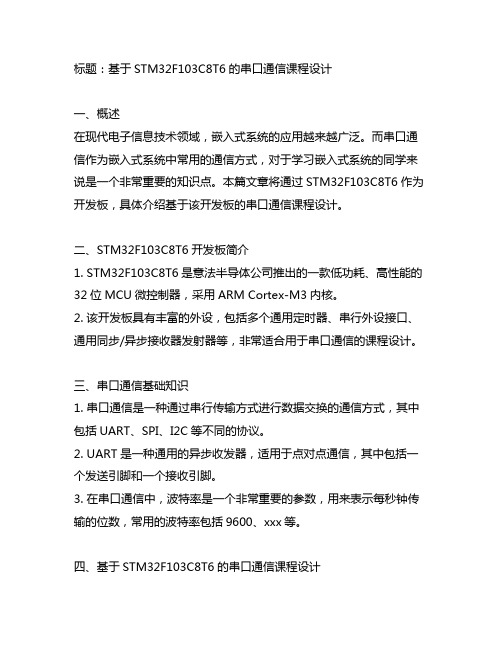
RS-232C是EIA(美国电子工业协会)1969年修订RS-232C标准。RS-232C 定义了数据终端设备(DTE)与数据通信设备(DCE)之间的物理接口标准。
1、机械特性 RS-232C接口有22根线,采用标准的25针连接器,连接器的尺寸及每个插针 的排列位置都有明确的定义。(阳头)
DB25的串口一般用到的管脚只有2(RXD)、3(TXD)、7(GND) 这三个,随着设备的不断改进,现在DB25针很少看到了,代替他的是 DB9的接口,DB9所用到的管脚比DB25有所变化,是2(RXD)、3 (TXD)、5(GND)这三个。因此现在都把RS232接口叫做DB9。
通用化的接口,借助串行通信标准接口,不同类型的数据通
信设备可以很容易实现它们时间的串行通信连接。
采用标准接口后,能方便地把各种计算机、外部设备、 单片机等有机地连接起来,进行串行通信。 标准异步串行通信接口有RS-232C、RS-422、RS- 423、RS-485等。
串行通信标准接口
一、RS-232C接口
全双工
三、串行通信的错误校验
奇偶校验 为了保证数据准确无误的,在串行通信中,常在传送过程
中进行相应的检测,避免不正确数据被误用。奇偶校验是最
常用的方法。 原理:特殊功能寄存器PSW的最低位就是奇偶校验位,它
的值根据累加器A的运算结果而变化。如果A中“1”的个数
为偶数个,则P=0;如果A中“1”的个数为奇数个,则P=1; 在串行通行时,把A的值和P的值同时传送,那么接收到数 据后,也对数据进行奇偶校验。如果结果符合,就认为接收 正确
异步通信的特点:不要求收发双方时钟的严格一致,实 现容易,设备开销较小,但每个字符要附加2~3位用于
起止位,各帧之间还有间隔,因此传输效率不高。
每个被传送字节数据由4部分组成,起始位(低电平)、数据位、校验位、 停止位(高电平),这4部分在通信中称为一帧。
2、同步通信
同步通信时要建立发送方时钟对接收方时钟的直接控制, 使双方达到完全同步。数据以数据块为单位连续传送,在 数据开始传送前用同步字符来表示,检测到规定的同步字 符后,下面就连续按顺序传送或接收数据,直到数据传送 结束为止。
8.1 计算机串行通信基础
8.2 80C51的串行口 8.3 单片机串行口应用举例
8.1 串行通信基础
随着单片机系统的广泛应用和计算机网络技
术的普及,单片机的通信功能愈来愈显得重要。 单片机通信是指单片机与计算机或单片机与单 片机之间的信息交换,通常单片机与计算机之 间的通信我们用的较多。 通信有并行通信和串行通信两种方式。在单 片机系统以及现代单片机测控系统中,信息的 交换多采用串行通信方式。
●REN,允许串行接收位。由软件设置。
REN=1,允许接收数据; REN=0,禁止接收数据。
PCON(电源控制寄存器)
PCON中只有一位倍增位。在串行口方式1、 方式2、方式3时,波特率与SMOD有关,当SMOD=1时, 波特率提高一倍。复位时,SMOD=0。
●TI,发送中断标志位。
在方式0时,发送完第8位数据后,该位由硬件置位。 在其它方式下,于发送停止位之前,由硬件置位。 TI = 1 表示帧发送结束,其状态既可供软件查询使用,也可 请求中断。TI由软件清“0”。
●RI,接收中断标志位。
在方式0时,接收完第8位数据后,该位由硬件置位。 在其它方式下,接收到停止位之前,该位硬件置位。 RI = 1 表示帧接收结束,其状态既可供软件查询使用,也可 请求中断。 RI由软件清“0”。
并行通信通常是将数据字节的各位用多条数据线同
时进行传送 。
8位同时传送 接 收 设 备 询问 应答
1 0 1 0 1 1 0 0
发 送 设 备
并行通信控制简单、传输速度快;由于传输线较多,长距离 传送时成本高且接收方的各位同时接收存在困难。
串行通信是将数据字节分成一位一位的形 式在一条传输线上逐个地传送。
是同步的(各位之间的距离均为“位间隔”的整数倍)。
间隙任意 接 收 10100100 设 备
1 0 10100100 1 0 11100110 1
发 送 0 11100110 设 备
异步通信的数据格式 :
一个字符帧 空 闲 起 始 位 数据位 校 验 位 停 止 位 空 闲
下一字符 起始位
LSB
MSB
空 闲
空 闲
1、方式1输出
写入SBUF TXD TI(中断标志) 起始
D0 D1 D2 D3 D4 D5 D6 D7
停止位
输出时,数据依次从TXD输出,一帧数据发送 完毕,使TXD线维持在高电平,并将SCON寄存器 中的TI置1,向CPU申请中断。
2、方式1输入
RXD 位采样脉冲 RI(中断标志) 起始
2、方式0输入
REN=1 RI=0 RXD(数据输入) D0 D1 D2 D3 D4 D5 D6 D7
TXD(移位脉冲)
二、方式1——10 位异步接收/发送(波特率可变)
TXD为数据发送引脚,RXD为数据接收引脚,传送一帧数 据的格式如图所示。其中1位起始位,8位数据位,1位停止位。
起 始 位 D0 LSB 1帧共10位 数据位8位 D7 MSB 停 止 位
数据
数据
数据
……..
同步字符
二、串行通信的传输方向
1、单工 单工是指数据传输仅能沿一个方向,不能实现反向传输。 2、半双工 半双工是指数据传输可以沿两个方向,但需要分时进行。 3、全双工 全双工是指数据可以同时进行双向传输。
发送 发送 接收 接收
时间2 时间1
接收 发送
发送 接收
接收 发送
单工
半双工
1 13 1 5
14
25
6
9
引脚 定义 符号 1(DCD) PC机收到远程信号(载波检测) 2 (RXD)PC机接收数据 3 (TXD)PC机发送数据 4 (DTR)PC机准备就绪 5 (SG)信号地 6 (DSR)对方准备就绪 7(RTS) PC机请求接收数据 8 (CTS)双方已切换到接收状态(清除发送) 9(RI) 通知PC机,线路正常,振铃提示
号...一般为0-5V... 低电平为零,
高电平为VCC.
TTL/CMOS OUTPUTS端,这个 端口的作用是输出TLL或CMOS 信号...输出电压一般为0-5V...低 电平为零..高电平为VCC.
RS232 OUTPUTS 这端口是把 TTL或CMOS的信号转为RS232 的信号输出...输出为正负12V... 到电脑.... RS232 INPUTS 这个端口是接 收到电脑发出的正负12伏...由 232输出转为TTL或CMOS信号... 这个信号也为正负12V... MAX232内部有二组232转换电 路... 使用的时候一般是 11-----14 13----12为一组. 10-----7 8----9为一组
收到前8位数据丢弃,且不产生中断申请。
当SM2=0时,不论收到的RB8为0和1,均可以使收到的数 据进入SBUF,在接收完当前帧后,产生中断申请(即硬件置位
RI)。
通过控制SM2,可以实现多机通信。 在方式0时,SM2必须是0。
●TB8:是发送数据的第九位, 在方式 2、3时,TB8 的内容是要发送的第 9 位数据 , 其 值由用户通过软件来设置。 在方式0和方式1中,该位未用。 ●RB8:接收的第9位数据 在方式2、3时,RB8是接收的第9位数据。 在方式1时,RB8是接收的停止位 在方式0时,不使用RB8
四、传输速率与传输距离
1、传输速率
比特率是每秒钟传输二进制代码的位数,单位是:位/秒 (bps)。如每秒钟传送240个字符,而每个字符格式包含10 位(1个起始位、1个停止位、8个数据位),这时的比特率为: 10位×240个/秒 = 2400 bps
8.1.2
串行通信标准接口
标准接口是指明确定义若干线,使接口电路标准化、
通信接口电路
MAX232与串口插座的接法
8.2 80C51的串行口
8.2.1 80C51串行口的结构
51单片机的串口是一个可编程全双工的通信接口,具有
异步通信收发器的全部功能,能同时进行数据的发送和接 收,也可作为同步移位寄存器使用。
8.2 80C51的串行口
8.2.1 80C51串行口的结构
第一部分是电荷泵电路。由1、2、3、4、5、6脚和 4只电容构成。功能是产生+12v和-12v两个电源,提供
给RS-232串口电平的需要。
第二部分是数据转换通道。由7、8、9、10、11、 12、13、14脚构成两个数据通道。其中13脚(R1IN)、 12脚(R1OUT)、11脚(T1IN)、14脚(T1OUT)为 第一数据通道。 8脚(R2IN)、9脚(R2OUT)、10脚(T2IN)、 7脚(T2OUT)为第二数据通道。
TTL/CMOS数据从T1IN、T2IN输入转换成RS-232数据
从T1OUT、T2OUT送到电脑DP9插头;DP9插头的RS232数据从R1IN、R2IN输入转换成TTL/CMOS数据后从 R1OUT、R2OUT输出。 第三部分是供电。15脚DNG、16脚VCC(+5v)。
TTL/CMOS INPUTS 端.这个端 口的作用是输入TLL或CMOS信