机器视觉的像素校准
EPSON机器人同第三方相机校准步骤
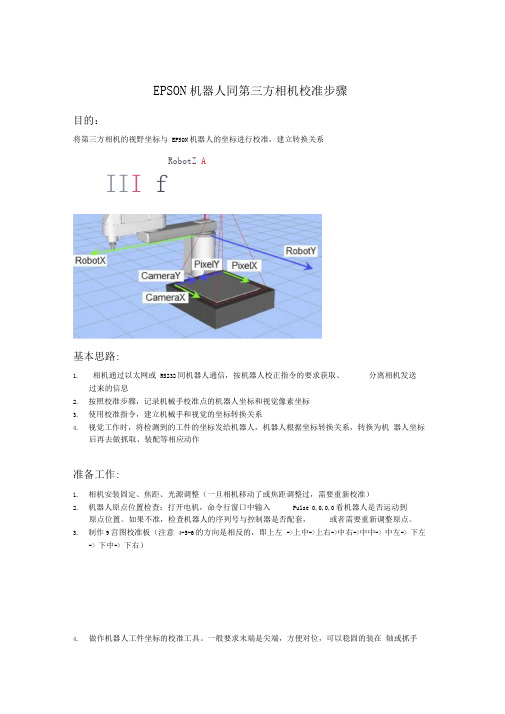
EPSON机器人同第三方相机校准步骤目的:将第三方相机的视野坐标与EPSON机器人的坐标进行校准,建立转换关系RobotZ AII I f基本思路:1.相机通过以太网或RS232同机器人通信,按机器人校正指令的要求获取、分离相机发送过来的信息2.按照校准步骤,记录机械手校准点的机器人坐标和视觉像素坐标3.使用校准指令,建立机械手和视觉的坐标转换关系4.视觉工作时,将检测到的工件的坐标发给机器人,机器人根据坐标转换关系,转换为机器人坐标后再去做抓取、装配等相应动作准备工作:1.相机安装固定、焦距、光源调整(一旦相机移动了或焦距调整过,需要重新校准)2.机器人原点位置检查:打开电机,命令行窗口中输入Pulse 0,0,0,0看机器人是否运动到原点位置。
如果不准,检查机器人的序列号与控制器是否配套,或者需要重新调整原点。
3.制作9宫图校准板(注意4-5-6的方向是相反的,即上左->上中->上右->中右->中中-> 中左-> 下左-> 下中-> 下右)4.做作机器人工件坐标的校准工具。
一般要求末端是尖端,方便对位,可以稳固的装在轴或抓手上)相机安装方式:相机安装方式有以下几种:1独立安装(相机坐标与机械手坐标不需要相互转换)2固定安装(固定向上、固定向下)3移动相机(J2 轴移动,J4 轴移动,J5J6 轴移动)安装方式比较:使用固定安装,相机无法移动,拍摄范围小;但是视觉检测的时间一般可以用机器人工作的时间并列运行,节省节拍时间。
使用移动相机,相机跟随机器人移动,可以拍摄的范围大;但是视觉进行检测前,机器人必须有一定的静止时间(0.2s~0.5s);视觉进行检测时,机器人一般需要停止不动,不能进行其他工作;整体节拍时间会更长。
因为机器人本身有定位精度,使用移动相机时,视觉检测的精度一般也比使用固定相机的低。
校准步骤:每种安装方式均需要不同的校准方式。
独立安装:使用9 宫格校准板,精确的测量该板9个点之间的坐标关系固定安装(固定向下)•使用九宫格校准板•机器人末端安装校准治具•示教治具末端的工具坐标Tool n•按照九宫图的顺序,机械手末端依次对准9个位置,机器人管理器中选择对应的Tool n,并保持点位置(如保持到P1到P9)•移开机器人,视觉识别九宫图上的9个点的像素坐标,同样按照九宫图顺序,将其像素坐标XY 依次保存到P11-P19 中。
机器视觉算法的精度评估及误差修正研究
机器视觉算法的精度评估及误差修正研究近年来,随着机器学习和人工智能技术的快速发展,机器视觉算法在图像识别、物体检测和目标跟踪等领域得到了广泛应用。
然而,在实际应用中,机器视觉算法的精度评估及误差修正成为了关注的重点。
机器视觉算法的精度评估是指对算法的准确性、鲁棒性和稳定性进行定量分析的过程。
它是评估算法实用性和可靠性的重要手段,能够为算法的改进提供实际依据。
首先,对于机器视觉算法的精度评估,我们需要明确评估的指标。
常见的指标包括准确度、召回率、精确度和F1值等。
准确度是指模型正确分类的比例,召回率是指模型正确找到正样本的比例,精确度是指模型正确分类为正样本的比例,F1值综合考虑了召回率和精确度。
根据不同的应用场景和任务需求,选择合适的评价指标进行精度评估是非常重要的。
其次,我们需要确定评估的数据集。
数据集的质量和多样性对于评估结果的影响很大。
将算法应用于真实场景中采集的数据,可以更好地评估算法的性能。
此外,数据集应包含具有挑战性的样本,以模拟真实世界中的复杂情况。
另外,为了避免过拟合,我们可以采用交叉验证或留出法等方法进行数据集划分,以保证评估结果的可靠性。
然后,我们需要选择适当的评估方法和算法。
对于图像分类和物体检测等任务,可以使用混淆矩阵和ROC曲线进行评估。
混淆矩阵可以直观地展示分类结果的准确性,ROC曲线则可以刻画分类器在不同阈值下的性能。
对于目标跟踪等任务,可以使用IoU(Intersection over Union)和精确度-召回率曲线进行评估。
IoU可以衡量目标与算法检测结果的重叠度,精确度-召回率曲线则可以全面评估目标跟踪的准确性和鲁棒性。
精度评估的结果可能会展示出算法的误差和不足之处。
为了修正这些误差,我们可以采用一系列的方法和技术。
首先,我们可以尝试改进算法的特征提取和表示方法。
通过设计更好的特征提取器或学习更有判别性的特征,可以提升算法的表征能力和准确度。
其次,可以考虑引入更多的训练数据或进行数据增强,以提高算法的鲁棒性和泛化能力。
机器视觉系统产品操作说明书
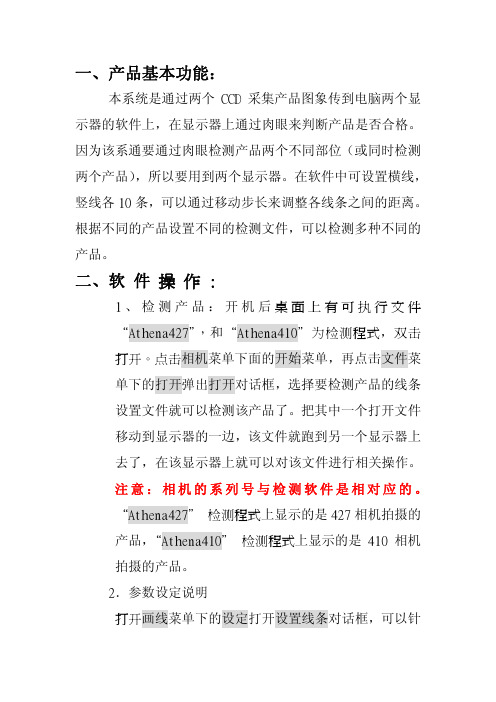
一、产品基本功能:本系统是通过两个CCD采集产品图象传到电脑两个显示器的软件上,在显示器上通过肉眼来判断产品是否合格。
因为该系通要通过肉眼检测产品两个不同部位(或同时检测两个产品),所以要用到两个显示器。
在软件中可设置横线,竖线各10条,可以通过移动步长来调整各线条之间的距离。
根据不同的产品设置不同的检测文件,可以检测多种不同的产品。
二、软件 操 作 :1、检测产品:开机后桌面上有可执行文件“Athena427",和“Athena410"为检测程式,双击打开。
点击相机菜单下面的开始菜单,再点击文件菜单下的打开弹出打开对话框,选择要检测产品的线条设置文件就可以检测该产品了。
把其中一个打开文件移动到显示器的一边,该文件就跑到另一个显示器上去了,在该显示器上就可以对该文件进行相关操作。
注意:相机的系列号与检测软件是相对应的。
“Athena427" 检测程式上显示的是427相机拍摄的产品,“Athena410" 检测程式上显示的是410相机拍摄的产品。
2.参数设定说明打开画线菜单下的设定打开设置线条对话框,可以针对不同的产品设置不同的画线。
先根据检测产品的要求先选中对话框中的横线(X1到X10,要几条就选中几条),竖线(Y1到Y10,要几条就选中几条)如下图1我们选中横线3条(X1,X2,X3)竖线3条(Y1,Y2,Y3)。
图1再将横线下面的AIIX换成X1,选择步长后再选择上移或下移就可以根据要求移动线条X1。
如下图2选择步长30点击上移两次后线条X1的位置如下。
其他线条设置也是这样的。
图2线条都设置好后点击文件菜单下的另为存菜单,在文件名下输入要检测产品名称,点击保存就可以保存该产品线条的设置。
如下图3。
这样可以设置并保存多种产品的线条设置文件。
图3还可以根据自己的要求更改每条线条的颜色。
先选中要修改颜色的线条,点击下面对应的颜色板,选中想要修改的颜色就可以了。
如下图4图4----修改线条颜色的操作图4----修改后线条的颜色2.像素大小的确定不同相机像素不同,一个步长就是一个像素。
常见机器人与视觉标定的几种办法

a是旋转标准的角度
Mdx=X1-X0,即旋转后Mark坐标与训练模板 的mark坐标
1.相机非线性校正
2.相机与机器人做9点标定 3.计算机器人的旋转中心 4.相机通过公式计算得出最终的输出结果
旋转中心标定说明
红色框为CCD FOV,黄色为工件
z
五星为Mark点
训练的标准位置
工件发生平移
y 工件发生平移和旋转
x Base Frame
所有 旋转中心方法用于
机器人与视觉配合场景
方法:计算工件实际发生的偏移量和旋转量,结合机器人的旋转中心进行二次补偿后,把补偿量 发送给机器人,然后机器人把补偿量补偿后进行抓取或放置即可;
下面介绍如何求解StDx和StDy
旋转中心标定—计算补偿
• StDx,StDy计算过程,首先Robot在拍照点旋转一定角度a(一定是Robot给出)
X0,Y0
X1,Y1
CDx= cos (a) * (Cx0-X0) - sin (a) * (Cy0-Y0) + X1 – Cx0 = (cos (a) -1) * (Cx0-X0) - sin (a) * (Cy0-Y0) + MDx = (cos (a) -1) * StDx- sin (a) * StDy+ MDx
CDy= cos (a) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Y1 – Cy0
X’= cos (a) * (X0-Cx0) - sin (a) * (Y0-Cy0) + Cx0
(X0, Y0)
Y’= cos (a) * (Y0-Cy0) - sin (a) * (X0-Cx0) + Cy0
计算机视觉中摄像机标定精度评估方法

计算机视觉中摄像机标定精度评估方法《计算机视觉中摄像机标定精度评估方法》摄像机标定(camera calibration)是计算机视觉中的重要环节,关系到图片的质量,是确定图片的世界坐标与像素坐标的关系的过程,是一个非常复杂的过程。
由于每一个摄像机都有其摄像机内参数,因此,开展摄像机标定是必须的。
摄像机标定精度的评估是摄像机标定的一个重要环节,也是检验摄像机标定结果的重要手段。
摄像机标定精度评估一般可以采用以下几种方法。
一、重投影误差法重投影误差法,也叫误差拟合法,是将实际的观测坐标与重投影模型的观测坐标之间的误差用回归法拟合,以获得总体的标定精度。
重投影误差法适用于误差分布满足正态分布和均值为0的原理。
它的优点是能有效的提取出标定系统的整体参数,对误差概率分布有一定要求,但该方法受实际质量影响较大,当误差分布不满足设定的条件时,结果不可靠。
二、多旋转法多旋转法是根据摄像机标定参数的某种随机变换模型,来评估标定精度。
它的基本原理是,当标定结果输出后,首先应用一组随机旋转向量对标定参数进行改变,再将改变后的参数带入标定系统中将原图片重投影,如果重投影结果与实际观测值偏差不大的话,则说明标定精度是比较可靠的。
多旋转法的优点是,无论误差分布是正态分布还是非正态分布,它都能够很好的反映标定系统的整体参数,且根据实际情况,可以采用任意的旋转模型,但它的缺点是,标定结果依赖于随机旋转向量的产生,且旋转向量的取值范围较为复杂。
三、迭代收敛法迭代收敛法通过反复迭代,计算出迭代结果与真实结果之间的偏差,从而评估摄像机标定精度。
它的优点是不受误差分布形态的影响,能很好的反映标定系统的整体参数,而且容易理解和实现;缺点是,结果受运算器的影响较大。
标定精度评估是计算机视觉中一个重要环节,在评估标定结果之前,应了解标定的原理,以及采用哪种评估方法,以及怎样评估,才能得出准确的标定精度评估结果。
机器人视觉系统的构建与校准方法

机器人视觉系统的构建与校准方法机器人技术的发展使得机器人在各个领域具备更加广泛的应用前景。
而机器人的视觉系统是其实现智能感知和环境感知的关键技术之一。
机器人视觉系统的构建和校准对实现机器人的自主导航、对象识别和目标跟踪等功能具有重要意义。
本文将介绍机器人视觉系统的构建与校准方法,为机器人在不同环境下实现高效精准的视觉感知提供指导和参考。
一、机器人视觉系统的构建1. 选择合适数量的摄像头:机器人视觉系统的构建首先要确定所需的摄像头数量。
根据具体应用需求,可以选择单个摄像头或多个摄像头,多个摄像头能够提供更多的视角和更全面的视野。
同时,要考虑摄像头的分辨率、帧率和接口类型等因素,以满足对图像质量和数据传输速度的要求。
2. 安装和固定摄像头:在选择合适数量的摄像头后,需要将摄像头正确地安装到机器人上。
首先要确定摄像头的安装位置,通常需要在机器人的头部或身体上选择一个适合的位置,以便摄像头能够获得最佳的视野。
其次,需要使用适当的固定装置将摄像头牢固地安装在机器人上,以避免在移动和操作过程中产生抖动和影响图像质量。
3. 连接和配置摄像头:完成摄像头的安装后,需要将摄像头与机器人的计算系统进行连接。
常见的连接方式是使用USB或网络接口进行连接。
接下来,对摄像头进行配置,包括设置分辨率、帧率和图像格式等参数。
这些参数的设置需要根据具体应用需求来确定,以保证视觉系统能够提供足够清晰和平滑的图像。
4. 编写视觉系统软件:机器人视觉系统的构建还需要编写相应的软件来处理和分析摄像头获取的图像数据。
常见的编程语言和平台包括C++、Python和ROS等。
视觉系统的软件可以用于进行对象检测和识别、运动跟踪和目标定位等功能。
在编写软件时,需要根据具体应用需求选择合适的算法和方法,以提高识别和跟踪的准确性和效率。
二、机器人视觉系统的校准方法1. 相机标定:相机标定是机器人视觉系统校准的基础工作,它主要用于确定相机的内部参数和外部参数。
机器视觉图像处理——基于LabVIEW系统校准与图像校正

机器视觉系统需要的信息包含在采集到的数字图像中,以像素的形式存在。
要实现准确测量和控制,需要使用真实世界的坐标系和测量单位,即要得到像素与真实世界坐标系的映射关系,才能进行后续处理。
· 透视畸变(perspective distortion ):相机未能垂直于被测目标安装· 径向畸变(radial lens distortion):相机所使用的镜头特性并不都与其光心处的特征一致· 切向畸变(tangential distortion ):图像传感器未能与镜头光面平行安装·非线性畸变(nonlinear distortion ):检测目标表面位非线性平面,存在起伏· 渐晕(vignetting ):光源不能提供均匀光照· 采集图像灰度分布不均:传感器有杂质或者目标表面非均匀机器视觉系统的校准多基于对各种畸变或相机进行建模完成,不同校准方法效果因使用场合而异。
可以使用误差映射表和误差统计对选用的校准方法进行定量评价。
畸变模型通过综合上述多种畸变方式,可获得图像处理前后的坐标关系。
畸变径向分量:畸变切向分量:在上述公式中:包含了5个畸变参数:k1、k2、k3、p1、p2 对于一个给定的镜头成像系统,这5个畸变参数怎么获得?这就涉及到“相机标定”,即需要根据一系列已知的若干对原成像点与畸变成像点的坐标值,带入以上公式来解出。
图像校准机器视觉系统的校准是为了找出图像中像素点与真实世界坐标系映射关系的过程,这一过程通常在空间域进行。
简易系统校准法(simple calibration ):也称点-距校准法(point-distance calibration )。
直接根据小孔成像模型计算出图像像素大小或像素间距在工作面上对应的实际距离,这是一种不考虑任何畸变近乎理想的方法,适用于畸变较小的场合。
使用IMAQ Set Simple Calibration2来快速建立点距校准的映射关系。
机器视觉系统的性能评估与校准技巧

机器视觉系统的性能评估与校准技巧机器视觉系统是一种通过计算机和相应的软件实现视觉功能的系统。
它通过使用传感器来捕捉和处理图像,从而模拟人眼的视觉功能,并且能够进行物体检测、识别和测量等任务。
然而,由于各种原因,机器视觉系统的性能可能会受到一些限制,因此评估和校准机器视觉系统的性能非常重要。
性能评估是指对机器视觉系统进行全面的测试,并根据指定的指标对其性能进行评估和衡量。
性能评估可以帮助我们了解机器视觉系统的准确度、稳定性、鲁棒性和速度等方面的表现。
在进行性能评估时,以下几个关键指标是需要考虑的:1. 准确度:准确度是评估机器视觉系统识别和检测功能的重要指标。
准确度可以通过计算系统的正确率、误识率和漏识率等指标来评估。
正确率指的是系统正确识别或检测出的物体的比例,误识率指的是系统错误地识别或检测出的物体的比例,漏识率指的是系统未能正确识别或检测出的物体的比例。
2. 稳定性:稳定性是指机器视觉系统在不同的环境条件下保持一致性的能力。
稳定性可以通过测试系统在不同光照、角度和距离等变化条件下的表现来评估。
稳定性评估可以帮助我们确定机器视觉系统在实际应用中的可靠性。
3. 鲁棒性:鲁棒性是评估机器视觉系统对噪声、遮挡和变形等因素的适应能力。
鲁棒性评估可以帮助我们确定系统在面临不完美条件时的表现,并为系统的改进提供指导。
4. 速度:速度是评估机器视觉系统处理图像的效率的重要指标。
速度可以通过测量系统处理单个图像的时间来评估。
在实际应用中,速度是一个关键因素,特别是在需要实时处理的场景下。
校准技巧是对机器视觉系统进行调整和优化,以提高系统的性能和精度。
以下是一些常用的校准技巧:1. 相机校准:相机校准是通过将相机的内部参数和外部参数进行精确测量和计算,从而提高图像的几何精度和准确性。
相机校准可以通过使用标定板或特定的图案来实现。
2. 光照校准:光照校准是通过调整系统的曝光时间和增益等参数,从而保证不同场景下的图像亮度一致性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对于辐射畸变可以使用如下公式进行纠正[2]:
xcorrected = x 1 + K1r 2 + K 2 r 4 + K 3 r 6 + K 4 r 8 + K 5 r10 + K n r ( ycorrected
2 1
( =y (1 + K r
n× 2 ) n× 2
+ K 2 r 4 + K 3 r 6 + K 4 r 8 + K 5 r10 + K n r (
Machine Vision Pixel Calibration
Dong Li, Maoqing Zhang
Institute of Mechanical and Electric Engineering, Soochow University, Suzhou Email: jerry.dong.li@ Received: Mar. 17th, 2014; revised: Apr. 12th, 2014; accepted: Apr. 20th, 2014 Copyright © 2014 by authors and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). /licenses/by/4.0/
[1] [2] Sonka, M., Havac, V. and Boyle, R. (2011) Image Processing, Analysis, and Machine Vision. 4th Edition, Cengage Learning, New York. Bradski, G. and Kaehler, A. (2008) Learning OpenCV: Computer Vision with the OpenCV Library. O’Reilly, Sebastopol.
-由于拍摄角度产生的形变图片
26
机器视觉的像素校准
-由于 CCD 或者 CMOS 以及镜头产生的形变图片
-由于实物三维的高低/前后/上下产生的形变图片
3. 机器视觉的像素校准的步骤以及计算方法
1) 制作带圆点的长方形校准板,其中板的颜色为白色,圆点颜色为黑色。
2) 使用相机拍摄校准版,可以得到形变后的图像
Abstract
We describe a method for the machine vision calibration. Based on pinhole camera model, we calibrate several pictures taken by a tablet. With geometry coordinate system transformation and combination of homogeneous graphics, this method calculates the camera intrinsic and extrinsic parameters considering of lens distortion. This method could be used for machine vision camera calibration.
2. 机器视觉的像素校准介绍
机器视觉的像素校准, 是指由把由相机拍摄的图片和实物进行比较计算, 获得两者之间的数学关系, 并可通过此关系来矫正图片,以此消除图片拍摄时由多种误差产生的形变。对于用来测量的机器视觉, 尤其是高精度测量的视觉系统,像素校验是必不可少的一环。 一张相机拍摄的图片,是通过像素为单位来存储所有信息的。像素校验使用了数学方法,把以像素 为单位的图片还原为我们常用的测量单位,如毫米,英尺等。 和普通摄影一样,当知道了焦距,CCD 或者 CMOS 的大小等硬件参数后,我们可以初略计算出其比 例关系。如,1 个像素对应 1 毫米,那 100 个像素就对应 100 毫米。但是,在相机拍摄图像时候,由于 CCD 或者 CMOS 的微小形变,以及镜头的畸变,外加拍摄角度的问题,其比例不是完全线性的。这个时 候就需要用到像素校验,它通过复杂计算,系统的产生整个图像于真是世界的映射关系。如下常见的形 变图片,需要通过像素校验还原: -由于拍摄距离产生的形变图片
Artificial Intelligence and Robotics Research 人工智能与机器人研究, 2014, 3, 25-33 Published Online May 2014 in Hans. /journal/airr /10.12677/airr.2014.32005
(
)
(
)
4. 使用软件进行相机像素校验
基于上述理论知识,可以配合视觉软件进行实验。这里选取了使用开源软件 OpenCV 来进行校验。 基于 OpenCV 的相机校验: OpenCV 使用方格棋盘做为校验板: 如果要获得相机的内参,外参以及畸变,可以使用 OpenCV 提供的校验函数: void cvCalibrateCamera2( CvMat* object_points, CvMat* image_points, int* point_counts, CvSizeimage_size, CvMat* intrinsic_matrix, CvMat* distortion_coeffs, CvMat* rotation_vectors CvMat* translation_vectors = NULL, int flags = 0 );
= Px R ( Pw − T )
其中 Pw:表示校准版上的实物坐标点; Px:表示相机坐标上的坐标点; R:表示实物坐标到相机坐标的一个角度矩阵(为相机的外参); T:表示实物坐标和相机坐标的平移差值(为相机的外参); 可以使用如下公式描述从相机坐标系到图片坐标系的变换:
Pc = sMPx
其中 Pc:表示图片坐标上的点,用(Xc, Yc)显示; Px:表示相机坐标上的坐标点,用(Xx, Yx, Zx)显示;
Keywords
Camera Calibration, Intrinsic Parameter, Extrinsic Parameter, Distortion
机器视觉的像素校准
李 冬,张茂青
苏州大学机电学院,苏州 Email: jerry.dong.li@ 收稿日期:2014年3月17日;修回日期:2014年4月12日;录用日期:2014年4月20日
30
机器视觉的像素校准
使用此函数,至少需要对于校验板使用不同角度,拍取 2 张图片。如果要获得准确度高的结果,建 议使用拍取不同角度的多张图片来进行校准。 校准前:
校准中:
校准后:
31
机器视觉的像素校准
对于提高精度,也可以使用圆点校验板,但是这样需要修改一些 OpenCV 的代码。 使用圆点校验板校验: 校验前:
α fx
fy 0
cx cy 1
其中: f x = F S x , f y = F S y ; F:表示焦距; Sx:表示水平每毫米的像素个数; Sy:表示垂直每毫米的像素个数; Cx:表示光轴与成像平面焦点的水平位置; Cy:表示光轴与成像平面焦点的垂直位置; a:表示 y 相对于 x 的切错,此切错一般因为感光芯片没有放置在光轴垂直位置,通常为 0。 2) 畸变的影响: 常见的畸变分为辐射畸变和正切畸变。
校验中:
校验后:
由于篇幅有限,这里就不详述其软件代码,有兴趣的读者可以邮件变,相机内参和相机外参的影响,建立坐标系模型,可以较为准确的给予机器视觉 进行像素校准。对于不同校验板以及多维度的校验板,需要进一步实验确认其精确度。
32
机器视觉的像素校准
参考文献 (References)
28
机器视觉的像素校准
s:表示放大系数; M:表示相机成像的特性(可以称为相机的内参)。 包含了如下特性参数: -焦距; -光轴与成像平面的交点; -像素大小; -像素切错系数(pixel skew angle); 为了计算方便,我们使用如下行列式表示 M[1]:
fx M = 0 0
) ) )
正切畸变,是由于 CCD 或者 CMOS 安装偏差导致的,可以使用如下图表示:
对于正切畸变,可以使用如下公式进行纠正:
2 2 xcorrected = x+ 2 p1 xy + p2 r + 2 x 2 2 ycorrected = y+ p1 r + 2 y + 2 p2 xy
辐射畸变,是由于镜片的偏差产生的,可以用如下图表示: 其中:P1A 为无畸变情况下,点 P1 在图像平面上的投影; P1D:为畸变情况下,点 P1 在图像平面上的投影; P2A:为无畸变情况下,点 P2 在图像平面上的投影; P2D:为畸变情况下,点 P2 在图像平面上的投影。
29
机器视觉的像素校准
摘
要
描述了一种机器视觉校准的方法。在基于小孔成像相机模型的基础上,使用平板拍取若干张照片进行校 验。 采用几何坐标变换, 并且结合齐次图形学, 考虑相机镜头畸变的情况下, 计算出相机的内参和外参。 此类方法可以广泛御用使用于机器视觉的相机的校准。
25
机器视觉的像素校准
关键词
相机校准,内参,外参,畸变
3) 使用数学方法,得到两个图像的映射关系
27
机器视觉的像素校准
通过比较图片和实物,圆点中心点的水平差值 dx 和垂直差值 dy。 数学公式表示如下: 1) 基于物理特性的数学映射方法如下:
校准板 图片 校准板在相机的投影
-校准板的坐标系为(Xw, Yw, Zw) -图片坐标系为(Xc, Yc),其中 X,Y 对应图片中的 X 和 Y 轴,而 Z 则是处于镜片光轴方向,其中 Zc = f (焦距)。 -相机坐标系为 1、2、3、4 点,是校准板在相机平面上的投影 可以使用如下公式描述校准板到相机坐标的变换: