ATmega16最小系统板硬件电路设计与分析
AVR单片机最小系统

串口电路设计
串口使用一个max232芯片。
使用跳线JMP2—1,不使用串口时,请将其断开,防止串口Байду номын сангаас路对IO口的干扰。
VCC与R2out之间接串上一个电阻R2和一个发光二极管LED1,特别说明,只有当此二极管闪的时候才说明串口在工作,直接接上的时候,此发光二极管也可能会亮。
当AVR在工作时,按下S0开关时,复位脚变成低电平,触发AVR芯片复位。
重要说明:实际应用时,如果你不需要复位按钮,复位脚可以不接任何的零件,AVR芯片也能稳定工作。即这部分不需要任何的外围零件。
晶振电路的设计(下图下面一部分)
Mega16已经内置RC振荡线路,可以产生1M、2M、4M、8M的振荡频率。不过,内置的毕竟是RC振荡,在一些要求较高的场合,比如要与RS232通信需要比较精确的波特率时,建议使用外部的晶振线路。
总设计图
本站提供PDF和SCH文件原理图下载:【PDF文件格式】【SCH文件格式】,制作完成的AVR DB-CORE Ver2.3 Atmega16如下图。
希望你设计出优秀的AVR电子产品,预祝你成功!
Mega16内带2.56V标准参考电压。也可以从外面输入参考电压,比如在外面使用TL431基准电压源。不过一般的应用使用内部自带的参考电压已经足够。习惯上在AREF脚接一只0.1uF的电容到地(C2)。
此处跳线JMP1为AD转换跳线,当你使用AD转换时,请连接,否则断开。
重要说明:实际应用时,如果你想简化线路,可以将AVCC直接接到VCC,AREF悬空。即这部分不需要任何的外围零件。
复位线路的设计(下图上面一部分)
基于ATMEGA16型微控制器的轮式移动机器人控制系统设计
基于ATMEGA16型微控制器的轮式移动机器人控制系统设计摘要本文基于ATMEGA16型微控制器设计了一种轮式移动机器人控制系统。
该系统主要由硬件电路和软件程序两部分构成。
硬件电路包括ATMEGA16微控制器、电机驱动模块、传感器模块等;软件程序实现了对电机的控制、传感器数据的采集等。
在设计过程中,通过对模块之间的连接和通信进行优化,提高了系统的稳定性和响应速度。
实验证明,该控制系统能够准确地控制轮式移动机器人的运动姿态,并实现自动化巡检和避障等功能。
关键词:ATMEGA16型微控制器;轮式移动机器人;控制系统;电机驱动;传感器模块AbstractA control system for wheeled mobile robots based on ATMEGA16 microcontroller was designed in this paper. The system consists of hardware circuit and software program. The hardware circuit includes ATMEGA16 microcontroller, motordrive module, sensor module, etc. The software programrealizes the control of motors, collection of sensor data, etc. In the design process, the connection and communication between the modules were optimized to improve the stability and response speed of the system. The experimental results show that the control system can accurately control themotion attitude of wheeled mobile robots, and realizefunctions such as automatic inspection and obstacle avoidance.Keywords: ATMEGA16 Microcontroller; Wheeled Mobile Robot; Control System; Motor Drive; Sensor Module1. 引言轮式移动机器人是一种智能化技术应用的重要代表,被广泛应用于巡检、清洁、运输等领域。
Atmega16多功能示波器 毕业设计

一、开展本课题的意义及工作内容:课题意义:数字存储示波器是集数据采集和模拟示波器优点于一身的一种精密测量设备,可以将其看作带有显示功能的数据采集系统,亦可将其看作是具有量化存储功能的模拟示波器。
与数据采集系统比,它一般有很多优点:如(1)更宽的输入频带;(2)更高的采样速率;(3)更深的存储深度,并有着数据采集系统所不具备的:直观屏幕显示功能;等效采样等等。
工作内容:利用单片机设计数字存储示波器。
用软件和硬件相结合快速把模拟信号转换为数字量,核心是用avr 单片机内带的10位AD 的转换器技术。
其模拟量通过示波器显示出来。
包括:数据采集模块,数据存储模块,数据输出模块。
二、课题预期达到的效果:(1)要求单边输入,不需要加入前级,可测0-5V 20K 以下任意波形。
双边输入,需要接入前级电路。
+ - 5V 范围。
(2)要求仪器的输入阻抗大于100k,垂直分辨率为12级/div ,水平分辨率为12点/div ;设示波器显示屏水平刻度为7div ,垂直刻度为4div 。
(3)要求设置2s/div 、0.2ms/div 二档扫描速度,仪器的频率范围为DC~500hz ,误差≤5%,。
(4)要求设置1.0V/div 、1.2V/div 二挡垂直灵敏度,误差≤5%。
(5)观测波形无明显失真。
二、文献综述(1) 前言示波器是最常用的一种电子测量仪器,能够直接有效地将被测信号显示出来,方便观察和测试被测信号的各种参数,完成其它测量仪器达不到的目的,是电子工程师完成电路设计、调试的有利工具。
主要研究内容目标特色 数字存储示波器是随着数字集成电路技术的发展而出现的新型智能化示波器,已经成为电子测量领域的基础测试仪器。
随着新技术、新器件的发展,它正在向宽带化、模块化、多功能和网络化的方向发展。
数字存储示波器的优势是可以实现高带宽及强大的分析功能.现在高端数字存储示波器的实时带宽已达到20GHZ ,可以广泛应用于各种千兆以太网、光通讯等测试领域。
ATmega16最小系统硬件设计
AVR基本硬件线路设计与分析(ATmega16功能小板)基本的AVR硬件线路,包括以下几部分:1。
复位线路2。
晶振线路3。
AD转换滤波线路4。
ISP下载接口5。
JTAG仿真接口6。
电源下面以本网站推荐的AVR入门芯片 ATmega16L-8AI 分析上述基本线路。
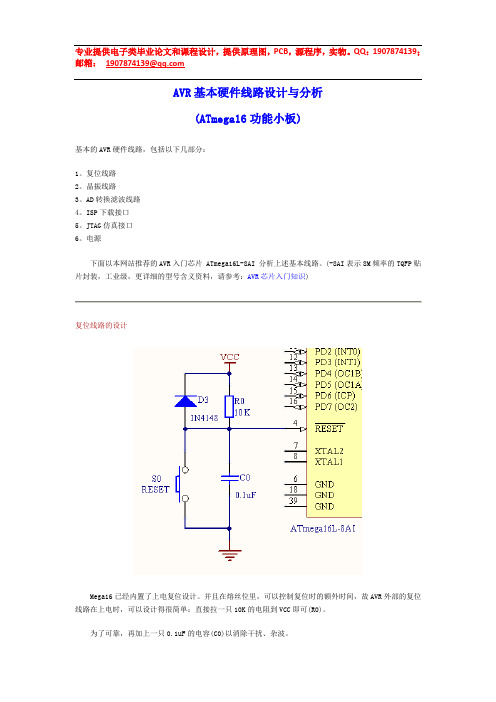
(-8AI表示8M频率的TQFP贴片封装,工业级,更详细的型号含义资料,请参考:AVR芯片入门知识)复位线路的设计Mega16已经内置了上电复位设计。
并且在熔丝位里,可以控制复位时的额外时间,故AVR外部的复位线路在上电时,可以设计得很简单:直接拉一只10K的电阻到VCC即可(R0)。
为了可靠,再加上一只0.1uF的电容(C0)以消除干扰、杂波。
D3(1N4148)的作用有两个:作用一是将复位输入的最高电压钳在Vcc+0.5V 左右,另一作用是系统断电时,将R0(10K)电阻短路,让C0快速放电,让下一次来电时,能产生有效的复位。
当AVR在工作时,按下S0开关时,复位脚变成低电平,触发AVR芯片复位。
重要说明:实际应用时,如果你不需要复位按钮,复位脚可以不接任何的零件,AVR芯片也能稳定工作。
即这部分不需要任何的外围零件。
晶振电路的设计Mega16已经内置RC振荡线路,可以产生1M、2M、4M、8M的振荡频率。
不过,内置的毕竟是RC振荡,在一些要求较高的场合,比如要与RS232通信需要比较精确的波特率时,建议使用外部的晶振线路。
早期的90S系列,晶振两端均需要接22pF左右的电容。
Mega系列实际使用时,这两只小电容不接也能正常工作。
不过为了线路的规范化,我们仍建议接上。
重要说明:实际应用时,如果你不需要太高精度的频率,可以使用内部RC振荡。
即这部分不需要任何的外围零件。
AD转换滤波线路的设计为减小AD转换的电源干扰,Mega16芯片有独立的AD电源供电。
官方文档推荐在VCC串上一只10uH 的电感(L1),然后接一只0.1uF的电容到地(C3)。
ATmega16_00硬件系统基本I0口使用

时钟源
ATmega16芯片有如下几种通过Flash熔丝位进行选 择的时钟源。时钟输入到AVR时钟发生器,再分配到相 应的模块。 •缺省时钟 器件出厂时缺省设置的时钟源是1 MHz 的内部RC振 荡器,启动时间为最长。这种设置保证用户可以通过 ISP 或并行编程器得到所需的时钟源。 •晶体振荡 XTAL1 与XTAL2 分别为用作片内振荡器的反向放大 器的输入和输出,这个振荡器可以使用石英晶体,也可 以使用陶瓷谐振器。
主要构成:
AVR CPU部分 程序存储器Flash 数据存储器SRAM和EEPROM 各种功能的外围接口,IO口,以及与他们 相关的数据、控制、状态寄存器等
8位数据总线
Flash程序 存储器
程序计数器
状态和控制
指令寄存器
32× 8 通用寄存器
中断单元 SPI单元 看门狗定时器
指令译码器
2个带预分频器、具有比较、PWM功能的8位定时器/ 计数器 1个带预分频器、具有比较、捕获和PWM功能 的16位定时器/计数器 1个具有独立振荡器的异步实时时钟(RTC) 4个PWM通道 8通道10位ADC 1个I2C的串行口 1个可编程的串行USART接口 1个主/从收/发的SPI同步串行接口 带片内RC振荡器的可编程看门狗定时器WDT 片内模拟比较器
//将端口A的第七位翻转 //将局部变量的第七位翻转 //将全局变量的第七位翻转
位操作
“按位与”用于检查某一位或某几位是否为1 #include<iom16v.h> #include<macros.h> unsigned char gtmpA void main() { unsigned char tmpB; while(tmpB&0x80) //查询局部变量第七位是否为“1” { //查询PA.7是否为“1” if(PINA&0x80) PORTA &=~0x80; //关闭A端口第七位 else …… } }
利用ATmega16L设计的温度控制系统.
利用ATmega16L设计的温度控制系统利用ATmega16L设计的温度概述:一种基于ATmega16L1 引言随着科学技术的进步,检测行业发展快速,除了检测项目和内容不断扩大,更重要的是检测愈来愈科学化、职能化,主要表现在检测过程及检测结果由计算机监控和显示。
多点温度的采集控制近年来在检测行业应用较为广泛,其中以微机为核心的监控技术价格低廉,使用方便,应用也最普遍。
本文主要介绍基于ATmega16L单片机的温度控制系统的设计,具体包括炉温的采集和控制、LCD显示以及PC机绘制温度变化的曲线图等。
硬件和软件设计采用模块化的思想,系统集成度较高。
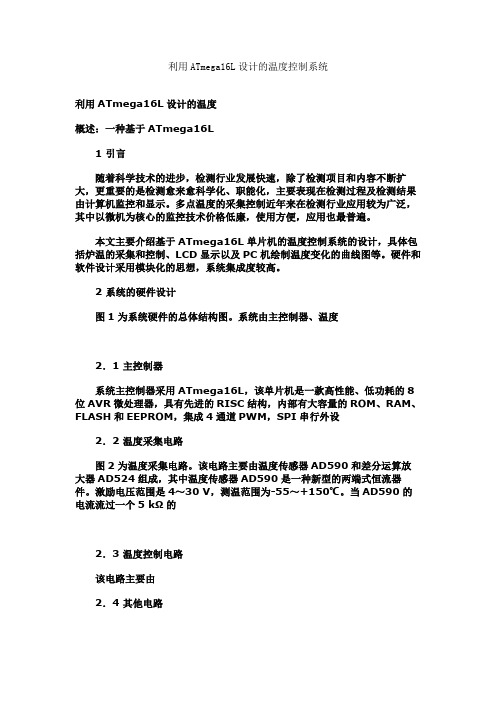
2 系统的硬件设计图1为系统硬件的总体结构图。
系统由主控制器、温度2.1 主控制器系统主控制器采用ATmega16L,该单片机是一款高性能、低功耗的8位AVR微处理器,具有先进的RISC结构,内部有大容量的ROM、RAM、FLASH和EEPROM,集成4通道PWM,SPI串行外设2.2 温度采集电路图2为温度采集电路。
该电路主要由温度传感器AD590和差分运算放大器AD524组成,其中温度传感器AD590是一种新型的两端式恒流器件。
激励电压范围是4~30 V,测温范围为-55~+150℃。
当AD590的电流流过一个5 kΩ的2.3 温度控制电路该电路主要由2.4 其他电路(1)显示电路系统的模块较多,I/0接口紧张,显示器选用液晶显示器TCl602A,接口采用高4位数据传输方式。
(2)键盘电路系统采用非矩阵式键盘,该键盘结构简单,使用方便,不会占用较多I/O,适用于按键个数较少的场合。
(3)串口电平转换电路电平转换由MAX488器件完成,MAX488为RS-488收发器,速度高于MAX232,简单易用,单+5 V供电,外接少量器件即可完成从TTL电平到RS-488电平的转换。
3 系统软件设计系统采用分层控制方式保证温度控制系统稳定。
下位机采用ATmega16L单片机作为硬件开发核心,采用C语言编程。
atmega16自制开发板系统
ATMEGA16开发板本系统包含内容:1、绘制电路板的原理图和pcb图2、下载软件使用中的一些问题3、基于NRF905模块的测试源代码说明:本系统由沧海一声笑原创。
博客地址:画了将近四天的时间做了一块atmega16的开发板,用覆铜板做的。
提供的接口有1602液晶,12864液晶,nrf905无线模块,SPI接口,串口。
同时12864兼容浩豚电子的TFT彩屏。
原理图如下:pcb图如下:说明:1、由于做的是覆铜板,pcb图中,max232附近的有两根线尚未接上。
2、由于个人疏忽,电源部分的ams117芯片管脚不对,可以不焊接进去,依然可以照常使用。
但是如果要焊接的话,须仔细比对原理图。
3、液晶的数据接口采用的是PORTC,jtag下载的相关接口就在其内,开始没注意,不论怎么写程序,测得的PORTC2,3,4,5管脚电压都是高电平。
这也是液晶测试程序仿真时正确,下载上去却无法正常工作的原因。
解决方法是,在下载的时候需对下载的软件进行设置熔丝位,把JTAGEN前面的钩钩去掉即可。
下面以SLISP为例:1)2)3)整整花了四天的时间。
1602的测试程序已经写好,如下:#define uchar unsigned char#define uint unsigned int#include<iom16v.h>#define RS 4#define RW 5#define EN 6#define PORT_CTL PORTA#define DDR_CTL DDRA#define DATA_PORT PORTC#define DATA_DDR DDRC#define DATA_PIN PINCvoid s_ms(uint ms){for(;ms>1;ms--);}//查忙void busy(void){uchar temp;s_ms(500);PORT_CTL&=~(1<<RS); //RS=0 s_ms(500);PORT_CTL|=(1<<RW); //RW=1 s_ms(500);while(temp){PORT_CTL|=(1<<EN); //EN=1s_ms(500);DATA_DDR=0x00; //A口变输入DATA_PORT =0xff; //上拉使能s_ms(500);temp =DATA_PIN&0x80; //读取A口 s_ms(500);DATA_DDR=0xff;DATA_PORT =0xff; //A口变输出 s_ms(500);PORT_CTL&=~(1<<EN); //EN=0s_ms(500);}}//写指令void writecom(uchar com){busy();s_ms(500);PORT_CTL&=~(1<<RS); //RS=0s_ms(500);PORT_CTL&=~(1<<RW); //RW=0 s_ms(500);PORT_CTL|=(1<<EN); //EN=1s_ms(500);DATA_PORT = com; //输出指令s_ms(500);PORT_CTL&=~(1<<EN); //EN=0 s_ms(500);}//1602初始化void LcdInit(void){writecom(0x38);s_ms(1000);writecom(0x01);s_ms(10000);s_ms(1000);s_ms(1000);s_ms(1000);s_ms(1000);s_ms(1000);s_ms(1000);writecom(0x02);s_ms(1000);writecom(0x06);s_ms(1000);writecom(0x0c);s_ms(1000);writecom(0x38);s_ms(1000);}//写数据void writedata(uchar data){busy();s_ms(500);PORT_CTL|=(1<<RS); //RS=1s_ms(500);PORT_CTL&=~(1<<RW); //RW=0 s_ms(500);PORT_CTL|=(1<<EN); //EN=1s_ms(500);DATA_PORT= data; //输出数据s_ms(500);PORT_CTL&=~(1<<EN); //EN=0 s_ms(500);}//读数据uchar readdata(void){uchar temp;busy();s_ms(500);PORT_CTL|=(1<<RS); //RS=1s_ms(500);PORT_CTL|=(1<<RW); //RW=1s_ms(500);PORT_CTL|=(1<<EN); //EN=1s_ms(500);DATA_DDR=0x00; //A端口变输入s_ms(500);temp = DATA_PIN; //读A端口s_ms(500);DATA_DDR=0xff; //A端口变输出s_ms(500);PORT_CTL&=~(1<<EN); //EN=0s_ms(500);return temp;}//================================================= // 描述:写LCD内部CGRAM函数// 入口:‘num’要写的数据个数// ‘pbuffer’要写的数据的首地址// 出口:无//================================================ void WriteCGRAM(uint num, const uint *pBuffer){uint i,t;writecom(0x40);PORT_CTL|=(1<<RS);PORT_CTL&=~(1<<RW);for(i=num;i!=0;i--){t = *pBuffer;PORT_CTL|=(1<<EN);DATA_PORT = t;PORT_CTL&=~(1<<EN);pBuffer++;}}//================================================= //描述:写菜单函数,本程序使用的LCD规格为16 * 2//入口:菜单数组首地址//出口:无//================================================= void WriteMenu(const uchar *pBuffer){uchar i,t;writecom(0x80); //数据地址PORT_CTL|=(1<<RS);PORT_CTL&=~(1<<RW);s_ms(50);for(i=0;i<16;i++){t = *pBuffer;DATA_PORT = t;PORT_CTL|=(1<<EN);s_ms(50);PORT_CTL&=~(1<<EN);pBuffer++;}writecom(0xC0);PORT_CTL|=(1<<RS);PORT_CTL&=~(1<<RW);s_ms(50);for(i=0;i<16;i++){t = *pBuffer;DATA_PORT = t;PORT_CTL|=(1<<EN);s_ms(50);PORT_CTL&=~(1<<EN);pBuffer++;}}//====================================================// 描述:在任意位置写数字函数// 入口:’row‘表示要写数字所在的行地址,只能为1或2// ’col‘表示要写数字所在的列地址,只能为0--15// ‘num’表示要写的数字,只能为0--9// 出口:无//===================================================void WriteNum(uchar row,uchar col,uchar num){if (row == 1) row = 0x80 + col;else row = 0xC0 + col;writecom(row);PORT_CTL|=(1<<RS);s_ms(500);PORT_CTL&=~(1<<RW);s_ms(500);DATA_PORT = num;s_ms(500);PORT_CTL|=(1<<EN);s_ms(500);PORT_CTL&=~(1<<EN);s_ms(500);}//================================================================ // 描述:在任意位置写任意多个字符// 入口:’row‘要写的字符所在的行,只能为1或2;// ‘col’要写的字符所在的列,只能为0---15// ‘num’要写字符的个数// ‘pbuffer’要写字符的首地址//================================================================== void WriteChar(uchar row,uchar col,uint num,uchar *pBuffer){uchar i,t;if (row == 1) row = 0x80 + col;else row = 0xC0 + col;writecom(row);PORT_CTL|=(1<<RS);s_ms(500);PORT_CTL&=~(1<<RW);s_ms(500);for(i=num;i!=0;i--){t = *pBuffer;s_ms(500);DATA_PORT = t;s_ms(500);PORT_CTL|=(1<<EN);s_ms(500);PORT_CTL&=~(1<<EN);s_ms(500);pBuffer++;}}uchar wz[]={""};uchar gd[]={"Good Luck!"};main(){DATA_DDR=0xff;DATA_PORT=0xff;DDR_CTL=0xff;PORT_CTL=0xff;LcdInit();while(1){WriteChar(1,1,13,wz);WriteChar(2,3,10,gd);}}NRF905无线模块双向计数测试程序:发送部分:/*注:发送部分的硬件电路是用以前做的16的最小系统版和数码管模块用杜邦线搭建的。
ATMEGA16单片机实验
实验一软件和硬件的认识一、实验目的:1、掌握硬件原理。
2、初步掌握实验板的使用方法。
3、熟悉软件工作界面。
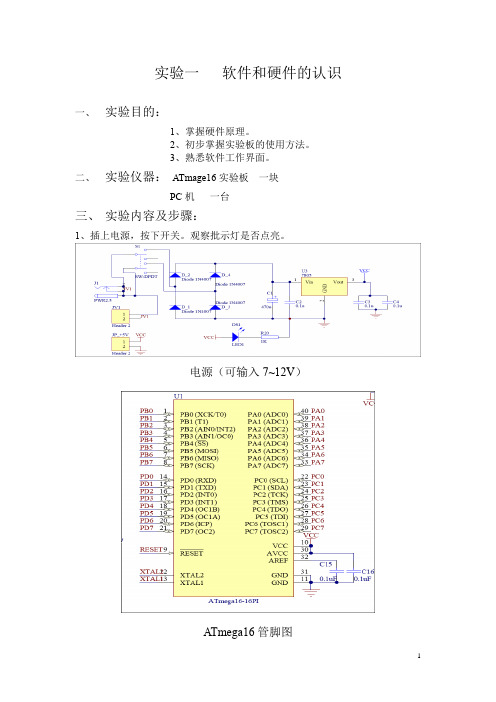
二、实验仪器:ATmage16实验板一块PC机一台三、实验内容及步骤:1、插上电源,按下开关。
观察批示灯是否点亮。
电源(可输入7~12V)ATmega16管脚图2、由原理可知I/O口的批示灯为低电平亮,在实验板上取地与I/O口相接,观察是否点亮。
I/O口LED显示与接口3、打开编程界面,点击各栏,认识各栏的用途。
A VRICC IDE 软件的工作界面4、输入以下程序:#include <iom16v.h>int main(void){DDRA = 0xff;/* all outputs */DDRB = 0xff;/* all outputs */DDRC = 0xff; /*all outputs */DDRD = 0xff; /*all outputs */PORTA = 0x00; /* 输出低电平*/PORTB = 0x00; /* 输出低电平*/PORTC = 0x00; /* 输出低电平*/PORTD = 0x00; /* 输出低电平*/while(1);}观察I/O口的灯是否被点亮。
实验二I/O口的输入与输出一、实验目的:1、了解IO口的结构;2、熟悉IO口的特性;3、掌握IO口的控制。
二、实验仪器:ATmage16实验板一块PC机一台三、实验原理:作为通用数字I/O 使用时,A VR 所有的I/O 端口都具有真正的读-修改-写功能。
这意味着用SBI 或CBI 指令改变某些管脚的方向( 或者是端口电平、禁止/ 使能上拉电阻) 时不会改变其他管脚的方向( 或者是端口电平、禁止/ 使能上拉电阻)。
输出缓冲器具有对称的驱动能力,可以输出或吸收大电流,直接驱动LED。
所有的端口引脚都具有与电压无关的上拉电阻。
并有保护二极管与VCC 和地相连,如Figure23 所示。
在控制I/O时,分别由方向寄存器DDRX与数据寄存器PORTX控制I/O的状态,如下表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ATmega16最小系统板硬件电路设计与分析
1、复位线路的设计
Mega16已经内置了上电复位设计。
并且在熔丝位里,可以控制复位时的额外时间,故AVR外部的复位线路在上电时,可以设计得很简单:直接拉一只10K的电阻到VCC即可(R0)。
为了可靠,再加上一只0.1uF的电容(C0)以消除干扰、杂波。
D3(1N4148)的作用有两个:作用一是将复位输入的最高电压钳在Vcc+0.5V 左右,另一作用是系统断电时,将R0(10K)电阻短路,让C0快速放电,让下一次来电时,能产生有效的复位。
当AVR在工作时,按下S0开关时,复位脚变成低电平,触发AVR芯片复位。
重要说明:实际应用时,如果你不需要复位按钮,复位脚可以不接任何的零件,AVR芯片也能稳定工作。
即这部分不需要任何的外围零件。
2、晶振电路的设计
Mega16已经内置RC振荡线路,可以产生1M、2M、4M、8M的振荡频率。
不过,内置的毕竟是RC振荡,在一些要求较高的场合,比如要与RS232通信需要比较精确的波特率时,建议使用外部的晶振线路。
早期的90S系列,晶振两端均需要接22pF左右的电容。
Mega系列实际使用时,这两只小电容不接也能正常工作。
不过为了线路的规范化,我们仍建议接上。
重要说明:实际应用时,如果你不需要太高精度的频率,可以使用内部RC振荡。
即这部分不需要任何的外围零件。
3、AD转换滤波线路的设计
为减小AD转换的电源干扰,Mega16芯片有独立的AD电源供电。
官方文档推荐在VCC串上一只10uH的电感(L1),然后接一只0.1uF的电容到地(C3)。
Mega16内带2.56V标准参考电压。
也可以从外面输入参考电压,比如在外面使用TL431基准电压源。
不过一般的应用使用内部自带的参考电压已经足够。
习惯上在AREF脚接一只0.1uF的电容到地(C4)。
重要说明:实际应用时,如果你想简化线路,可以将AVCC直接接到VCC,AREF悬空。
即这部分不需要任何的外围零件。
4、ISP下载接口设计
ISP下载接口,不需要任何的外围零件。
使用双排2*5插座。
由于没有外围零件,故PB5(MOSI)、PB6(MISO)、PB7(SCK)、复位脚仍可以正常使用,不受ISP的干扰。
重要说明:实际应用时,如果你想简化零件,可以不焊接2*5座。
但在PCB设计时最好保留这个空位,以便以后升级AVR内的软件。
5、JTAG仿真接口设计
仿真接口也是使用双排2*5插座。
需要四只10K的上拉电阻。
重要说明:实际应用时,如果你不想使用JTAG仿真,并且不想受四只10K的上拉电阻的影响,可以将JP1-JP4断开。
AVR单片机最常用的是5V与3.3V两种电压。
本线路以开关切换两种电压,并且以双色二极管指示(5V时为绿灯,3.3V时为红灯)。
二极管D1防止用户插错电源极性。
D2可以允许用户将电压倒灌入此电路内,不会损坏1117-ADJ。
1117-ADJ的特性为1脚会有50uA的电流输出,1-2脚会有1.25V电压。
利用这个特点,可以计算出输出电压:
当SW开关打向左边时,R6上的电流为 1.25/0.33 = 3.78ma 。
R8上的电流为1117-ADJ 1脚电流加上R6上的电流,即0.05+3.78=3.83ma. 可以计算得R8上的电压为3.84V。
于是得出VCC=1.25+3.83=5.08V。
误差在2%以内。
当SW开关打向右边时,R6上的电流为 1.25/0.62 = 2.02ma 。
R8上的电流为1117-ADJ 1脚电流加上R6上的电流,即0.05+2.02=2.07ma. 可以计算得R8上的电压为2.07V。
于是得出VCC=1.25+2.07=3.32V。
误差在1%以内。
使用1%精度的电阻,可以控制整个输出电压误差在3%以内。
重要说明:实际应用时,视乎使用1117-ADJ的品牌,输入电压可以低至7伏甚至更低。
(也可以同时使用低压降的二极管代替1N4007)。
总设计图
Mega16功能小板正面图:晶振可以使用螺丝固定的方法更换,方便做实验,并达到一定的可靠性。
VCC,GND均有一测试针。
Mega16功能小板底部图:为了方便实验,我们将这块小板的输出脚,按直插ATmega16的管脚排列定义。
为防止不小心掉到地上导致插针折断,加装了一只40脚的圆孔IC座做保护。
如果不小心折断,可以方便地更换圆孔IC座。