基于CAN总线的多电机协调运动控制系统研究_刘涛
华中科技大学2013年第一批大学生创新创业训练计划项目

项目 负责人 刘启聪 张锋 王广 封华翼 陈晓阳 赵翰卿 陈戈 蔡硕 戴志翔 冯帆 丁延庆 李政桐 杨温 张剑 袁希 申俊豪 李鹏霄 毕晟 丁铣 范鑫 刘生 朱泽
年级
指导 项目组成员 老师 陈焕新 陈武忠、冯睿哲 杨昆 甄佳迪、王硕、沈陆威 靳世平 何升、朱丹晨、罗然、杨贤沛 张燕平 何彪、胡凯、曹锐、王金泽 杨晴 毕振、陈斌、崔翔 赵海波 林霖、赵文娟、舒梦影 刘志春 陈洪强、熊彪、马预谱、张煜昌 罗光前 陈宣龙、李澍冉 李建兰 索明琛、刘闵婕 黄晓明 马阅新、刘金戈、周浪、彭天泽 杨晴 周顺、杨雅之、陈建霖、刘光皓 梁琳 王卓、张旭升、孟涵、刘彬 张林 赵靖、柯彦庭、郭斌 张燕平 王琦、郭瑞伟 罗小兵 艾立文、李聪、雷宇霆、李柯桥 舒水明 江伟权、焦鹏东、贲腾 黄晓明 朱鹏程、陈家豪、黄兴忠 王卓 王晨阳、李凯豪 吴懿平 郑哲新、张湘涛、朱其文 薛丽红 尹圣铭、郭斌 刘洁 陈莹、谯燚军 吴丰顺 邵远城、李成斌、侯朝昭、喻奎伦 魏青松 王伟、张希磊、张昂 李中伟 陈宏伟、严航 夏卫生 李启建、朱士一、万雄、罗丞 吴丰顺 王捷、龙煌、韩莹 周龙早 陈池、陈万楷 叶升平 龚昱、潘慕晗、史慧婷 夏卫生 任强、彭浩 周龙早 陈伟波、凌芳、王奇 李黎 黎豪森、田杨、王睿、官天培 骆汉宾 秦剑飞、王豫斌、张慧杰 段爱媛 罗小芹、王观、俞恬、郑倩 苗雨 喻建军、成厚松、程建平 张长清 查道锋、方英杰、杜明阳、刘宗祺
华中科技大学2013年第一批大学生创新创业训练计划项目公示名单
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 院系 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 机械科学与工程学院 船舶与海洋工程学院 船舶与海洋工程学院 船舶与海洋工程学院 船舶与海洋工程学院 能源与动力工程学院 能源与动力工程学院 能源与动力工程学院 能源与动力工程学院 能源与动力工程学院 能源与动力工程学院 能源与动力工程学院 项目名称 叶片三维建模和误差评价 人脸识别 基于单片机与传感器的智能垃圾箱 基于FSAE的仪表盘设计 基于PID算法的线性电子调速器的设计 基于电磁控制的模块化ECU气门生成技术 微型四旋翼无人机的无线传感器网络通信系统开发 基于四旋翼飞行器的结构创新设计 基于嵌入式linux的机器人操作系统 四旋翼图像识别定位与运动对象跟踪系统的开发 轮式服务机器人结构设计和运动稳定性研究 turn-safety新型地震床 千分表自动检定仪器 基于手机蓝牙控制的大型点阵水泡鱼缸 GO购够(新式购物车) 宠物管家 基于偏振相移干涉显微术的表面微观形貌测量研究 超分辨率激光干涉位移测量系统 移动智能导盲交互终端设计 救生腰带 基于android实现手机对智能机器人的通讯与控制 双光栅位移传感器 半潜式自主水下机器人 基于ARM的船舶主动陀螺减摇装置 基于LabVIEW的海洋测量船远程监控系统 基于加速度计的水下结构物速度测量系统开发 基于麦克风换能原理的噪音发电装置 厢式电梯配重调节系统 太阳能集热板多方位转动逐日装置 混合散热型半导体制热/制冷一体箱 可变叶片面积的小型风力发电机 针对蹲便器设计的高效节水冲便器 基于温差电效应的烤炉余热利用装置 项目 负责人 赵昆明 王有财 刘昭 陈世振 阮惠恒 祝强强 崔帅 姚远 应江枫 卢锦 王博 刘旭 邹轶敏 黄振东 蒋建宇 黄河 刘冰 杜俊贤 刘颖晟 殷子卉 关康 王升超 王冠学 毕晓波 江正 费林林 王鹏程 金粲 欧彪 蒋志敏 胡成波 蔡建华 孟凡冉 年级
基于CAN总线的电动车控制系统设计方案
随着现代汽车的快速发展,汽车电子设备不断增加,传统的接线方式已远远不能满足汽车愈加复杂的控制系统要求,汽车控制局域网CAN总线应运而生,它广泛应甩于汽车电子控制系统中,也是唯一一个成为国际标准的汽车局域网。
目前,由于环境污染和能源危机问题日益严重,电动汽车的发展开始得到各国的高度重视,成为未来汽车发展的主流方向。
电动汽车主要具有三大关键技术:驱动控制系统、电池电源、整车电子控制系统。
整车电子控制系统必须满足纯电动汽车的设计理念,使之既节能又简单可靠。
在目前电池技术水平下,解决两大关键技术,有助于电动汽车在中国首先市场化,其经济意义不言而喻。
电动汽车动力系统结构复杂多样,部件类型繁多。
先进高效的控制体系结构,可以使电动汽车各动力系统之间的数据交换满足简单迅速、可靠性高、抗干扰能力强、实时性好、系统错误检测和隔离能力强等要求。
本文设计了一种基于CAN总线的电动汽车整车电子控制系统,本系统采用短帧的报文结构,数据传输时间短,具有很强的抗干扰性,具有高效的非破坏总线仲裁,出错检测和故障自动关闭等优点。
1 控制系统整体结构电动车控制系统由电池管理、充电机、电动机和整车控制等模块组成。
本系统总体结构如图1所示。
由图1知,CAN通信网络上共有4个通信节点。
整车控制器接收BMS、CCS、电机控制器的报文提供的各种参数;充电机接收BMS发送的控制信息并根据报文数据的电压电流设置来工作;电机控制器接收BMS发送的电池状态信息设置来工作,同时电机控制器接收由整车控制器发送的控制信息并根据报文数据的转矩设置来工作。
2 CAN总线节点的硬件电路设计CAN是ControllerAreaNetwork的缩写,是ISO国际标准化的串行通信协议。
在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。
由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
基于CAN总线的直流电机控制系统

摘要本文介绍的是一种应用CAN总线的直流电机控制系统,该系统以宝马LPC1768开发板为核心,主要由CAN总线控制器模块、CAN总线收发模块、电机驱动器模块、直流电机等多个模块组成,利用CAN总线通信将摄像头图像采集处理信息输入控制板控制电机转动,实现功能要求。
本次设计主要分为CAN总线通信(完成主板与电机控制板间的通信)和电机控制(利用CAN总线传来的数据进行相应动作)两个板块,其CAN属于总线式串行通讯网络, 由于采用了许多新技术以及独特的设计,与一般的通信总线相比,CAN总线的数据通信具有较高的可靠性、实时性和灵活性。
另外, CAN 总线具有成本低、接线简单的特点。
其中电机控制板块以 PWM技术控制电机运转,使其转速按照预定的规律变化。
实验表明,该控制系统通信可靠,调速性能良好,响应速度快。
本系统基本实现了设计要求,实现了通过CAN总线接收控制指令并将直流电机运动完成相应动作的功能。
该系统采用基于CAN总线的直流电机控制,提高了信息传输可靠性,减少了系统维护的成本,提高了电动机的工作效率,从而提高了整个工业生产的效率,实现了自动化、智能化、现代化的生产,有较好的应用价值。
【关键词】CAN总线通信直流电机LPC1768 PWM L298N目录摘要 (I)第一章绪论 (1)第一节概述 (1)第二节设计题目与设计内容 (2)第三节任务分工 (3)第四节本章小结 (3)第二章总体方案设计 (3)第一节设计方法简述 (3)第二节基本原理 (3)第三节工作流程 (6)第四节实物演示效果 (8)第五节本章小结 (10)第三章个人设计工作 (11)第一节电机驱动芯片的选择 (11)第二节电路的构建 (12)设计总结 (12)参考文献 (15)第一章绪论第一节概述CAN总线是一种缩写,全称应是“控制器局域网络总线”,是英文Controller Area Network的首字母组合而成的。
它是总线的一种,与我们常见的USB总线属于一类概念,只不过CAN总线采用差分信号传输,有很强的错误检测能力,通信距离远,因此被用到一些特殊的场合,比如汽车,厂矿等干扰较强的地方。
基于CANopen协议实现多电机系统实时控制

中图分类号:T M30112 文献标志码:A 文章编号:100126848(2009)0920053204基于C ANopen 协议实现多电机系统实时控制李 澄,赵 辉,聂保钱(哈尔滨工业大学控制与仿真中心,哈尔滨 150001)摘 要:以混合动力试验台的研制为背景,结合车辆控制中CAN 总线的普及应用,分析并采用CAN 总线的高层CANopen 协议,实现了试验台中多电机系统的实时控制。
提供的CANopen 主从站节点的构建与设置以及功能编程方法,在系统实际运行中得以充分验证。
相关实现方案适用于多数工业自动化应用场合。
关键词:CAN 总线;CANopen 协议;多电机系统控制;现场总线;电机控制I m ple m en t a ti on of Rea l 2ti m e Con trol of M ulti 2m otor Syste m sBa sed on CANopen Protocol L I Cheng,ZHAO Hui,N IE Bao 2qian(Contr ol and Si m ulati on Center,Harbin I nstitute of Technol ogy,Harbin 150001,China )Abstract:Taking the devel opment of a HEV (Hybrid Electric Vehicle )test bench as the backgr ound,taking the popular app licati on of CAN bus in the vehicle industry int o account,this paper p resented a sche me t o i m p le ment the real 2ti m e contr ol of multi 2mot or syste m s in the test bench .One of CAN high layer p r ot ocol,CANopen had been analyzed and adop ted t o realize the real 2ti m e communicati on .Thebuilding and setting of the CANopen master and slave nodes,and relevant p r ogra m fl ow charts were p res 2ented in detail .Verified by the teat and operati on of the real syste m ,the sche me that app lied in this pa 2per is app licable in most industrial aut omati on app licati ons .Key W ords:CAN bus;CANopen p r ot ocol;Multi 2mot or syste m s contr ol;Fieldbus;Mot or contr ol收稿日期:20082052310 引 言CAN 总线是一种有效支持分布式控制和实时控制的串行通信网络[1]。
毕业博士生获省部级以上科研奖励情况

自然科学奖
未授奖
109 110 111 112 113 114 115 116 117 118 119 120 121 122 123
孙晓光 王玲 王玲 苏晓杰 陈硕 刘强 初佃辉 初佃辉 初佃辉 初佃辉 夏龙 齐宏拓 雷作涛 雷作涛 李邦盛
基于摩擦金属学研究的纳米改性耐磨新材料与应用 电子电器产品无铅化共性技术研究与应用 典型高端家电产品绿色制造关键技术研究及应用 不确定切换系统的滑模控制理论研究 教育部博士研究生学术新人奖 自韧a-SiAlON陶瓷材料的微结构控制及其高温性能的相关基础研究 基于射频技术的现代国际物流管理信息系统 面向中小企业信息化的软构件及其开发平台 第九届山东省优秀青年科技奖 基于构件复用技术的船舶建造协同管理软件系统 反应制备新型陶瓷的基础研究 高层建筑钢管约束钢筋混凝土技术研究与应用 中远红外非线性光学晶体XXX生长技术及应用 中远红外非线性光学晶体磷化锗锌生长技术及应用 高比强合金熔铸技术基础研究
科技进步奖 科技进步奖 科技进步奖 科技进步奖
三等奖 三等奖 三等奖 三等奖
20 21 22 23 24 25
唐岚 查富生 陈志国 陈志国 陈志国 陈志国
高海拔大容量远距离输电中行波故障测距技术研究 面向MEMS精密作业的微小型移动机器人 火山灰材料在道路工程中的应用研究 火山灰材料在道路工程中的应用研究 季节性冻土地区路基路面稳定技术研究 季节性冻土地区路基路面稳定技术研究
发明奖 科技进步奖 科技进步奖 科技进步奖 科技进步奖 科技进步奖
一等奖 二等奖 三等奖 二等奖 二等奖 二等奖
26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46
陈志国 陈志国 柳浩 徐平 鞠春华 吕民 吕民 张辉 叶平 叶平 叶平 王纲 王纲 王纲 宋煜 孟华 孟华 孟华 孟华 韩凤晶 韩凤晶
西安交通大学本科生科研训练和实践创新基金项目结题验收结果

两轮自平衡移动机器人系统设计与实现
桂若伟
汪金亮、肖显峰
昝鑫
合格
2012010
电信学院
面向移植适应症普适医疗网络地数据诊断问题研究
刘连理
宋涵彧、王瑜、卢笑言、王映周
赵仲孟、王嘉寅
合格
2012004
电信学院
基于机器视觉地自动寻迹智能模型车系统设计与实现
关新宇
方超伟、张骏
昝鑫
合格
2012014
电信学院
西北地区粘土尘粒对污染物表面吸附及非均相反应特性研究
马惠颖
王志洋、孙成斌、李晓东、李曦
刘艳华
优秀
2012083
管理学院
基于信任服务(credence-based services)地医患问题研究
蒋鹏
黄东旭、王修贤、王晓檬、陶晶
高杰
优秀
2012044
理学院
锂离子电池负极材料Co3O4地控制合成及其电化学性能研究
王琴
谭思璐、刘亚坤、代鹏、张亚锋
郭菊娥
合格
2012086
管理学院
西安高新区建设世界一流科技园区地对策研究
陶玮哲
许婷、魏子荐
韩平
合格
2012078
管理学院
大学生创业地初始资源及其获取方式
李德铭
贝丽珠、李春晓、郭静雅、孙嘉楠
赵文红
合格
2012082
管理学院
我国商业银行实际利差形成机理研究
郭凯
崔雨竹、张玉林、任光茫、郭舒雅
合格
2012042
机械学院
基于气动人工肌肉地肘部康复装置设计
折应双
张永强、周伟、占一方、于清泰
刘吉轩
基于CAN总线的嵌入式测试系统
基于CAN总线的嵌入式测试系统内蒙古科技大学信息工程学院李胜玉刘涛武志超摘要:本文给出了一种基于CAN总线的高速嵌入式测试系统的设计方案及其软硬件的实现方法,对32位汽车专用芯片Mac7112中的FlexCAN模块及CAN口收发芯片TLE6250的特性和用法作了简要的介绍。
关键词:FlexCAN、嵌入式测试系统(ETS)、TLE6250引言测试是系统开发过程中十分重要的一个步骤,是保证产品质量的有效手段之一,本文介绍了一种实时、高效、稳定的测试软件的设计,通过CAN总线实现下位机与上位机的连结,CAN 总线是一种多主方式的串行通讯总线,具有较高的传输速率,优良的抗电磁干扰性,支持差分收发,适合高噪声环境,可实现较远的距离的传输的优点。
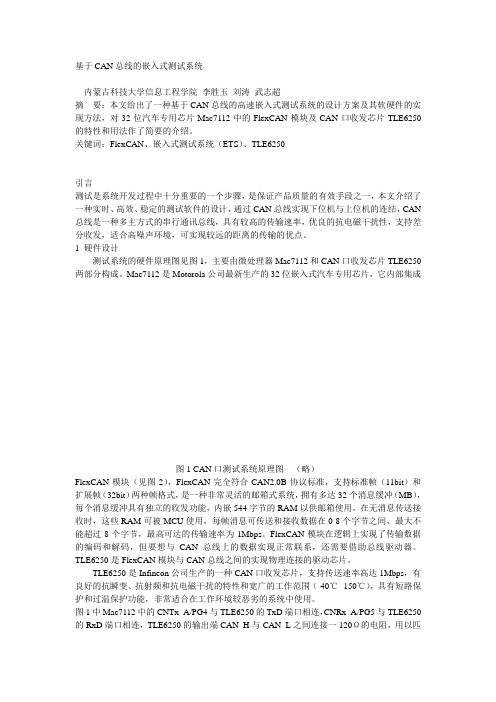
1 硬件设计测试系统的硬件原理图见图1,主要由微处理器Mac7112和CAN口收发芯片TLE6250两部分构成。
Mac7112是Motorola公司最新生产的32位嵌入式汽车专用芯片,它内部集成图1 CAN口测试系统原理图(略)FlexCAN模块(见图2),FlexCAN完全符合CAN2.0B协议标准,支持标准帧(11bit)和扩展帧(32bit)两种帧格式,是一种非常灵活的邮箱式系统,拥有多达32个消息缓冲(MB),每个消息缓冲具有独立的收发功能,内嵌544字节的RAM以供邮箱使用,在无消息传送接收时,这些RAM可被MCU使用,每帧消息可传送和接收数据在0-8个字节之间,最大不能超过8个字节,最高可达的传输速率为1Mbps。
FlexCAN模块在逻辑上实现了传输数据的编码和解码,但要想与CAN总线上的数据实现正常联系,还需要借助总线驱动器。
TLE6250是FlexCAN模块与CAN总线之间的实现物理连接的驱动芯片。
TLE6250是Infineon公司生产的一种CAN口收发芯片,支持传送速率高达1Mbps,有良好的抗瞬变、抗射频和抗电磁干扰的特性和宽广的工作范围(-40℃--150℃),具有短路保护和过温保护功能,非常适合在工作环境较恶劣的系统中使用。
基于CAN总线的多电机协调运动控制系统研究
机床 与液压
MAC NE TOOL & HYDRAUL CS HI I
F b2 0 e . 01
Vo . 8 No 3 13 .
第3 8卷 第 3期
D : 0 3 6 /.sn 1 0 OI 1 . 9 9 j i . 0 1—3 8 . 0 0 0 . 2 s 8 12 1. 30 4
P a t a e ut h w t e t c nc lp a tr f hs c n rls se me ttc n lg e u r me t . rc i lrs l s o h e h i a a mee s o i o t y tm e e h oo y r q i c s r t o e ns
Ab t a t sr c :Mu t mo o t n c n r ls se s u e r n r d l n i d s il ae . I S i o tn o i r vn y - l — trmoi o t y t m i s d mo e a d mo e wi ey i n u t a ra i o o r t mp r tt mp o i g s n ’ a e r n z d a c r c f l — tr moin c n r ls se h o ie c u a y o t moo t o to y t m. T e sr cu e o l — tr moi n c n r ls se w s p o o e a e n mu i o h tu t r fmu t moo t o t y tm a r p s d b s d o i o o
Kewo d : Mut moo t nc nrlsse ; C u ; SAI0 y rs l— trmoi o to y tm i o AN b s J O 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2010年2月第38卷第3期机床与液压MACH I NE TOOL &HYDRAU LI CSFeb 12010V ol 138N o 13DO I :10.3969/j 1issn 11001-3881120101031024收稿日期:2009-01-19作者简介:刘涛(1979)),男,讲师,主要从事工业机器人控制方面的研究。
E-m ai:l hrbeu411j ys @1631co m 。
基于CAN 总线的多电机协调运动控制系统研究刘涛,王宗义,孔庆磊,武光田(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)摘要:多电机协调运动控制系统在工业领域中的应用越来越广泛,深入研究多电机的协调运动控制,提高其同步精度具有重要的意义。
提出基于CAN 总线的多电机运动控制系统结构,设计基于SJ A 1000的具有CAN 总线通信功能的硬件模块和软件模块。
实际运行结果表明该运动控制系统的各项技术参数均满足工艺要求。
关键词:多电机协调运动;CAN 总线;SJ A 1000中图分类号:T P273 文献标识码:B 文章编号:1001-3881(2010)3-075-3Research onM ult-i m otor M otion Control Syste m Based on CAN BusL I U Tao ,WANG Zongy ,i KONG Q i n g le,i WU Guangti a n(Co llege o fAuto m ati o n ,H arbin Eng i n eeri n g Un i v ersity ,H arbin H eilong jiang 150001,Ch i n a)Abstrac t :M ult-i m o t o r m oti on con tro l syste m i s used m ore and m ore w ide l y i n i ndustr i a l area .It p s i m po rtan t t o i m prov i ng syn -chron i zed accuracy of mu lt-im otor m oti on contro l syste m.The structure of m ult-i mo tor mo ti on contro l syste m was proposed based on CAN bus .The hard w are m odu l e and so ft w are modu le w it h t he f unction o f CAN bus co mmun ica ti on w ere desi gned based on SJ A 1000.P ractical resu lts show the technical pa rame ters o f this contro l syste m m eet techno logy requ ire m ents .K eyword s :M u lt-imo tor m o tion contro l syste m;CAN bus ;SJ A1000运动控制在工业生产中的作用举足轻重,多电机协调运动控制是运动控制的一个重要分支。
进入是21世纪以来,多电机协调运动控制在工业领域中的应用越来越广泛,控制精度与工艺要求也越来越高。
诸如印刷设备、造纸设备、垂直升船机、印染设备和轧钢等有着多个分散工作机构的大型设备,只有保证多个电机之间按某种比例关系同步协调运转,才能确保生产的正常运行;系统同步性能的好坏,直接影响到产品的品质和性能。
因此,深入研究多电机的协调运动控制,提高其同步精度具有重要的意义。
长期以来多电机传动协调控制一直采用集散控制,集散控制系统(DCS)是一种专用的封闭的系统,有着自身难以克服的缺点。
CAN 总线是现场总线的一种,是支持分布式实时控制系统的串行通信局域网,具有高性能、高可靠性、实时性等优点。
基于现场总线的分布式控制系统(FCS)适应了工业控制系统向分散化、网络化、智能化的发展方向,是一种开放性好、低成本、高可靠性控制系统。
继DCS 后的FCS 运用于多电机传动协调控制得到了越来越多的关注。
1 系统总体设计111 传统的多电机协调控制DCS 系统多电机协调控制系统中,第一台电机为主令电机,决定了系统的协调转速,其他电机称为从动电机,从动电机的转速向主令电机看齐。
传统的多电机协调控制系统是典型的DCS 系统,协调控制较简单,控制系统要解决的问题是根据生产工艺的要求决定多电机的协调转速,构成独立的转速定值闭环控制系统。
各电机的转速大小、负荷相互独立,各个闭环回路中控制器的控制规律和控制参数也按常规双闭环调速系统设计考虑。
112 基于C AN 总线的多电机协调运动控制系统现场总线打破了传统控制系统一对一的结构形式,采用智能现场设备,把原先DCS 系统中处于控制室的控制模块、各输入输出模块置于现场设备中,加上现场设备具有通信能力,现场的测量变送仪表可以与阀门等执行机构直接传送信号,因而控制系统功能的实现能够不依赖控制室的计算机或控制仪表,直接在现场完成,实现分散控制。
CAN 协议分为不同层次:目标层、传输层、物理层。
目标层和物理层完成I SO /OSI 模块定义的数据链路层功能。
它可以非常有效地构成分布式实时过程监测和控制系统,并且具有非常高的可靠性。
CAN 总线规范了任意两个节点之间的兼容性,包括电气特性及数据解释协议,保证设计的透明性及执行的灵活性。
基于CAN 总线的多电机协调运动控制系统采用分布式控制结构,整个控制系统分上位机和下位机两大部分,下位机的每个控制模块都有CAN 通讯功能。
在底层控制各个电机的运动控制模块和完成远控盒按键识别的控制模块组成下位机部分,每个电机运动控制模块控制一个电机的运动,相互之间通过CAN 总线协议传递协调信息,来达到协调运动的目的。
上位机的硬件主要包括两个部分,工业级PC104和CAN 卡。
PC 机选用盛博科技的PC104计算机,CAN 卡选用周立功公司的PC104CAN2I 。
控制系统总体设计图如图1所示。
图1 控制系统总体设计图为了完成上述设计目标,模块间、模块与上位机之间通讯系统要求接口简单、可靠性高、应用灵活、实时性高、性价比高并且支持多主通讯、远距离通讯等,CAN 总线通讯以其自身的优点被该系统选作通讯系统的实现方式。
2 具有CAN 通讯功能的电机控制模块的硬件设计运动控制模块节点结构框图如图2所示。
图2 运动控制模块节点结构框图运动控制模块各功能块实现的功能如下:(1)微控制器负责整个节点模块的运行管理、数据存储、任务调度、状态反馈、在线烧写等。
(2)通信模块负责上下位机信息通信,节点间命令传送、数据传送等。
存储模块负责记录主机下发给各个节点的数据表,并在自动运行时,按照一定格式读出数据表,根据命令进行执行。
(3)在线烧写模块负责更新单片机程序。
(4)电机信号处理模块负责对单片机输出的脉冲信号进行处理,经放大、驱动处理,供控制电机使用。
(5)检测信号处理模块负责检测各轴运动的极限位置,并进行报警,或者检测各轴运动特定位置信息,进行处理。
(6)按键处理模块负责对远处远控盒的信息进行辨别,并启动响应处理程序。
从成本和难易程度考虑,系统采用Philips 公司生产的P89V 51RD 2FN 作为微控制器。
该单片机具有64K 并行可编程的非易失性FL A S H 程序存储器和1K 的数据存储器,并可实现对器件串行在系统编程(I SP )和在应用中编程(I A P )。
在系统编程(I n -Syste m P rogr a mm i ng ,简称ISP ):当M CU 安装在用户板上时,允许用户下载新的代码;在应用中编程(In -A pplication Progra mm i ng ,简称I AP ):M CU 可以在系统中获取新代码并对自己重新编程。
后者允许通过调制解调器连接进行远程编程。
芯片内部还有两个定时/计数器,可对其进行编程来实现定时、计数、捕获、方波输出等功能。
CAN 控制器选用Ph ilips 公司生产的SJ A 1000。
它是一种能用于一般工业环境的独立CAN 控制器,经过简单连接就可以完成报文控制、数据滤波等CAN总线的物理层和数据链路层的功能。
其硬件与软件设计不仅兼容PCA 82C200的基本CAN 模式Basic CAN,还支持增强CAN 模式P eli C AN 。
CAN 收发器采用周立功公司生产的CT M 1040T CAN 收发模块,它是CAN 控制器和物理总线之间的接口,提供向总线的差动发送功能和对CAN 控制器的差动接收功能。
电机驱动芯片采用82C54工业级芯片和SN 7407驱动芯片。
通过微控制器对82C54编程发出控制电机速度和方向的脉冲信号,并通过SN7407将信号放大后提供给电机驱动器。
在控制过程中,运动机械本体通过传感器向微控制器反映当前运动状态从而让微控制器对其运动状态做出及时的调整。
3 具有CAN 通讯功能的电机控制模块的软件设计基于CAN 总线的运动系统的软件设计主要包括上位机与CAN 的通讯程序和下位机与CAN 的通讯程序,在这里主要介绍下位机与CAN 的通讯程序。
带有CAN 接口的下位机作为CAN 总线运动控制系统的从节点,主要完成两项任务:一是当上位机请求数据时,将从节点采集的数据和状态等信息传送给#76#机床与液压第38卷上位机;二是执行监测反馈信号输入与控制电机的任务。
主程序的软件流程如图3所示。
图3 主程序软件流程主程序调用各子程序分别执行初始化模拟量输入、数字量输入、数据处理、控制、模拟量输出、数字量输出操作通信软件分为部分初始化、数据发送数据接收,初始化主要是设置的通信参数,几需要初始化的控制寄存器有模式寄存器、时分寄存器1接收代码寄存器、屏蔽寄存器、总线定时寄存器、输出控制寄存器等。
根据下位机软件实现的功能,下位机软件功能结构分为7个模块,如图4所示,具体介绍如下:(1)硬件测试。
通过下发一条命令、回传一条命令证实通讯系统硬件和通讯子程序正常;通过向指定位置存取一个固定数,然后从指定地址读取这个数,并加1上传到人机界面,看结果是否正确来证实模块数据存储硬件和存储子程序是否正确;通过下发命令,命令指定轴旋转多少度或者运动多少直线距离,然后量测机械实际运动量,检验机械单轴运动精度。
(2)参数修改。
包括通讯波特率、模块I D 指定、脉冲当量、信息存储位置、脉冲运转份数、焊接变轨宽度、焊接变轨长度、起始速度、减速距离等参数的设置和修改。