(完整word版)塔吊分析报告—理论力学
塔吊的分析与改进1

同济大学浙江学院塔吊的分析与改进专业:机械设计制作及其自动化学生姓名:汤理梁学号:090813完成时间:2012年12月12日一、上回转自升固定平臂式塔吊的分析与改进 (1)二、塔吊的分析 (1)(一)塔吊的基本结构 (1)(二)塔吊的原理 (6)三、塔吊的改进 (12)(一)旧式回转机构的适用性及存在的问题 (12)(二)调速机构的改进 (12)一、上回转自升固定平臂式塔吊的分析与改进塔吊是建筑工地上最常用的一种起重设备,以一节一节的接长(高),好像一个铁塔的形式,还叫塔式起重机,用来吊施工用得钢筋、木楞、脚手管等施工原材料的设备。
具有回转半径大、提升高度高、操作简单、装卸容易等优点,是建筑工地普遍使用的一种起重机械。
二、塔吊的分析(一)塔吊的基本结构塔机外型示意图见图3—6,由金属结构部分、机械传动部分、电气系统和安全保护装置组成。
电气系统由电动机、控制系统、照明系统组成。
通过操作控制开关完成重物升降、塔臂回转和小车行走操作。
图3—6塔式起重机整体结构图1-固定基础;2-固定支腿;3-附着装置;4-顶升机构;5-下支座;6-上支座;7-回转机构;8-回转塔身;9-司机室;10-变幅机构;11-载重小车;12-吊钩;13-起重臂;14-起重臂拉杆;15-塔顶;16-平衡臂拉杆;17-平衡臂;18-平衡重;19-起升机构;20-电控柜;21-塔身一般来说塔吊按各部分的功能可以分为:机座、塔身、顶升机构、回转机构、起升机构、平衡臂、塔臂、行走小车、变幅、驾驶室、塔顶等部分。
(1)机座是最底下用来固定和支撑整个塔机的部分;(2)塔身是塔机身子,也是升高的部分;(3)顶升部分是使得塔机可以升高;(4)回转机构是保持塔机上半身可以水平旋转的;(5)起升机构用来将重物提升起来的;(6)塔臂一般就是提升重物的受力部分;(7)平衡臂架是保持力矩平衡的;(8)行走小车是用来安装滑轮组和钢绳以及吊钩的,也是直接受力部分;(9)变幅是使得小车沿轨道运行的;(10)司机室是操作的地方;(11)塔顶当然是用来保持臂架受力平衡的;塔吊的牵引机构与起升机构起升机构是塔式起重机中最重要、最基本的机构,是以间歇,重复工作方式,将重物通过其中吊钩或其他吊具悬挂在承载构件(如钢丝绳、链条)上进行起升、下降,或起升与运移的机械设备。
理论力学word详细版4~5章

第四章空间力系本章将研究空间力系的简化和平衡条件。
工程中常见物体所受各力的作用线并不都在同一平面内,而是空司分布的,例如车床主轴、起重设备、高压输电线塔和飞机的起落架等结构。
设计这些结构时,需用空间力系的平衡条件进行计算。
与平面力系一样,空间力系可以分为空间汇交力系、空司力偶系和空间任意力系来研究。
§4-1 空间汇交力系1.力在直角坐标轴上的投影和力沿直角坐标轴的分解若已知力F与正交坐标系Oxyz三轴间的夹角分别为α、β、γ,如图4-1所示,则力在三个轴上的投影等于力F的大小乘以与各轴夹角的余弦,即X=F cosαY=F cosβ (4-1)Z=F cosγF,然当力F与坐标轴Ox、Oy间的夹角不易确定时,可把力F先投影到坐标平面Oxy上,得到力xy后再把这个力投影到x、y轴上。
在图4-2中,已知角γ和 ,则力F在三个坐标轴上的投影分别为X=F sin γcos ϕY=F sin γsin ϕ (4-2) Z=F cos γ若以x F 、y F 、z F 表示力F 沿直角坐标轴x 、y 、z 的正交分量,以i 、j 、k 分别表示沿x 、y 、z 坐标轴方向的单位矢量,如图4-3所示,则 图4-2F =x F +y F +z F =X i +Y j +Z k(4-3)由此,力F 在坐标轴上的投影和力沿坐标轴的正交分矢量间的关系可表示为:x F =X i ,y F =Y j ,z F =Z k (4-4)如果己知力F 在正交轴系Oxyz 的三个投影,则力F 的大小和方向余弦为 F =222Z Y X ++cos(F ,i )=F Xcos(F ,j )=F Y(4-5)cos(F ,k )=FZ例4-1 图4-4所示的圆柱斜齿轮,其上受啮合力n F 的作用。
已知斜齿轮的齿倾角(螺旋角) β和压力角α,试求力n F 沿x 、y 和z 轴的分力。
解:先将力n F 向z 轴和Oxy 平面投影,得Z=-n F sin αxy F =n F cos α再将力xy F 向x 、y 轴投影,得X=-xy F sin β=-n F cos αsin β Y=-xy F cos β=-n F cos αcos β则n F 沿各轴的分力为x F =-n F cos αsin βi ,y F =-n F cos αcos βj ,z F =-n F sin αk式中i 、j 、k 为沿x 、y 、z 轴的单位矢量,负号表明各分力与轴的正向相反。
塔式起重机双吊点水平起重臂的受力分析研究

弯 矩 ,为 后 续 一 系列 的设 计 提 供 科 学 合 理 的 结 构 ห้องสมุดไป่ตู้ 数 。
关 键 词 :臂 架 结 构 ;水 平 起 重 臂 ; 受力 分 析 ;塔 式起 重 机
中 图 分 类 号 :T H2 1 3 . 3 文献 标 识 码 :A
0 引 言
成 内拉杆与 臂架 成 角 、 外 拉 杆 与 臂 架成 角 的基 本
第 2期 ( 总第 1 7 7期 )
2 0 1 3年 4 月
机 械 工 程 与 自 动 化
M ECHANI CAL ENGI NEERI NG & AUT( ) M ATI ( ) N
NO. 2 A pr .
文章编号: 1 6 7 2 - 6 4 1 3 ( 2 0 1 3 ) 0 2 — 0 1 0 1 — 0 3
X1
= = =
+Z
,
_o . 5 q x j 。
( b )吊重 点右 侧 ( <z ≤Z 。 ) 的弯矩 为 : M1 ( X)一 F e . A zl 一 0 .5 q x }一 G ( z 1一 X)一
塔式起重机的静力学分析

塔式起重机结构的静力学分析摘要:强度和振动特性是设计塔式起重机的金属结构的重要指标。
文章从有限元的基础理论出发,利用ANSYS软件,对塔式起重机进行静力学分析,获得了其应力应变结果,比较了三种典型的工况,指出了极限吊重情况下静态极限强度的位置,并分析了塔式起重机的振动频率和振型,为研究塔式起重机的其他动力响应提供了依据。
关键词:塔式起重机静力学分析有限元 ANSYS引言:塔式起重机(tower crane)简称塔机,亦称塔吊,起源于西欧。
动臂装在高耸塔身上部的旋转起重机。
作业空间大,主要用于房屋建筑施工中物料的垂直和水平输送及建筑构件的安装。
由金属结构、工作机构和电气系统三部分组成。
当起重臂架绕塔式起重机的回转部分作360°回转、吊重载荷沿起重臂架运行并升降时以及由于驱动控制系统电机抖动等原因,都会使塔式起重机引起振动。
在此情况下,吊重荷载等动荷载对塔式起重机结构所引起的内力和变形,要比同样大小的静荷载所引起的大,有时甚至大得多。
由于塔式起重机结构及构件承受的动荷载一般都很大,而且加载次数较为频繁,更容易产生疲劳破坏。
作为大型设备,塔机的工作特点是根据建筑需要将物品在很大空间内升降和搬运,属于危险作业。
目前,在建筑施工中,由塔机引起的人员伤亡和设备事故屡禁不止,重大事故发生率居高不下。
塔机的强度和振动频率是影响塔机寿命和稳定性的重要因素,因此对塔式起重机进行静力学和振动的研究是十分要必要的。
本文利用有限元分析软件ANSYS对塔式起重机QTZ630进行建模,分析了三种加载在塔式起重机上的典型的工况,得出了塔式起重机在三种工况下的静力学应力和应变云图,找出塔式起重机各个工况下的危险位置,为其塔机的改进提供参考。
提取出塔机的前5阶振动模态,为其他动力学响应提供研究依据。
1.塔式起重机的结构及性能参数1.1塔式起重机的结构塔式起重机主要由机械部分、金属结构和电气三大部分组成。
机械部分主要是指起升机构、运行机构、变幅机构、回转机构、行走机构、架设机构等等,这些机构根据工作需要或有或无,但起升机构是必不可少的。
塔吊基础总结
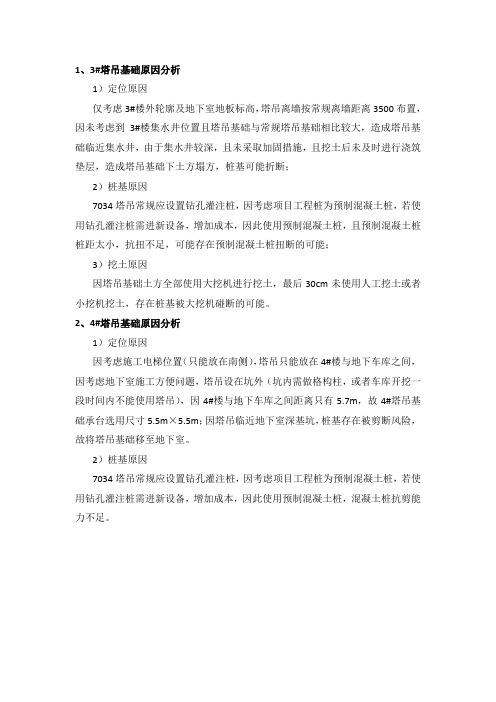
1、3#塔吊基础原因分析
1)定位原因
仅考虑3#楼外轮廓及地下室地板标高,塔吊离墙按常规离墙距离3500布置,因未考虑到3#楼集水井位置且塔吊基础与常规塔吊基础相比较大,造成塔吊基础临近集水井,由于集水井较深,且未采取加固措施,且挖土后未及时进行浇筑垫层,造成塔吊基础下土方塌方,桩基可能折断;
2)桩基原因
7034塔吊常规应设置钻孔灌注桩,因考虑项目工程桩为预制混凝土桩,若使用钻孔灌注桩需进新设备,增加成本,因此使用预制混凝土桩,且预制混凝土桩桩距太小,抗扭不足,可能存在预制混凝土桩扭断的可能;
3)挖土原因
因塔吊基础土方全部使用大挖机进行挖土,最后30cm未使用人工挖土或者小挖机挖土,存在桩基被大挖机碰断的可能。
2、4#塔吊基础原因分析
1)定位原因
因考虑施工电梯位置(只能放在南侧),塔吊只能放在4#楼与地下车库之间,因考虑地下室施工方便问题,塔吊设在坑外(坑内需做格构柱,或者车库开挖一段时间内不能使用塔吊),因4#楼与地下车库之间距离只有5.7m,故4#塔吊基础承台选用尺寸5.5m×5.5m;因塔吊临近地下室深基坑,桩基存在被剪断风险,故将塔吊基础移至地下室。
2)桩基原因
7034塔吊常规应设置钻孔灌注桩,因考虑项目工程桩为预制混凝土桩,若使用钻孔灌注桩需进新设备,增加成本,因此使用预制混凝土桩,混凝土桩抗剪能力不足。
塔式起重机塔帽静力学有限元分析
:
为 了保证 整个 模 型分 析 的准 确性 和便 捷 性 , 将 整个 塔 吊的布局 简 化成 平 面来 进 行 分 析 ( 图3 ) , 图
中标 明的各 个 数 据 均 进 行 了 圆整 处 理 ( 长度单位 :
am) r 。
培 帽
‘
0
5
1 O l 5 20 25 30 35 40 45 50
在进 行塔 机受 力分 析 时 , 平 衡 臂 所 产 生 的横 向与 纵 向的 内应 力分 别称 为 Fx, F ( 图4 ) 。
塔 帽
‘
工况 2 : 配重块 自重使拉 杆 产生 的拉力 该工 况 下 , 平 衡 臂 上 的重 块 产 生 的 相 应 力 为 F, 此时 可将配 重臂 本身 看做 是一 个轻 杆 , 并将整 个 配重 块看 做是 一个集 中载荷 , 受力 分析 见 图 7 。
重 时使拉 杆 产 生 的 拉 力 ; ( 5 ) 小 车 伸 出 幅 度 最 大 时
图 6 工况 1 受 力 分 析
( 5 0 m) 跨 端满 负荷起 重 时使拉 杆产 生 的拉力 。
将连 接塔 帽顶 端与 平衡 臂及 平衡块 的拉杆 拉力
由 力 矩平 衡知: ∑ M一 0 , 得到 下 列方 程
F Βιβλιοθήκη } l 平 衡臂 1 000
起重臂
1 400O
38O 00 。 5 OOOO
。
1 3580
l
G
f
图 7 工 况 2受 力 分 析
根 据
M 一0 得
:
对 工况 细分 , 进行 静力 学分析 , 结 合分 析得 出 的 数据 将各 种工 况 加 以复 合 , 得 到 与 实 际 情况 相 贴 合
塔机十字形基础力学分析及抗倾翻稳定性计算
塔机十字形基础力学分析及抗倾翻稳定性计算设计?制造塔执守彩基鼬力学分析及抗倾翻稳定性计算何学功冯功斌孙刚内窖摘要:针对塔式起重机实际工况,通过对十字形基础的力学分析,得出其抗倾翻稳定性的计算公式.关量词:塔式起重机基础抗倾翻稳定性十字形混凝土基础是塔式起重机常采用的基础形式之一,特别在中,小型塔机中应用更为广泛.在GB/T13752-92《塔式起重机设计规范》,GB135—90《高耸结构设计规范》等有关文献中,对该型式基础的计算均未作明确规定.本文拟通过对十字形基础力学状态的分析,得出塔机十字形基础抗倾翻稳定性的计算公式,供参考.1一般规定(1)在讨论中,假定地基是均匀而具有弹性的土壤,基础是刚性的,基础型式及外载荷如图1所示.为讨论方便,基础作用于基土的载荷组合为弯矩和包括基础重力在内的垂直力c(1ift时的水平力忽略不计).即:Ml=M+Vhhc=V o+MlG×e式中:——上部垂直载荷,N;——基础自重,N;F^——上部水平载荷,N;圈1IL———上部弯矩,Nm;e——偏心距113.(2)由塔机实际工况可知,弯矩矢量方向是绕回转中心旋转的,因而在讨论中应考虑其方向处于基础正方向(图6所示)和对角方向(图1所示)两种工况.(3)由上述两规范分析可知,塔机抗倾翻稳定性应满足以下两方面原则条件:a.在规定的工况下,基础底面允许部分脱开基土的面积不得大于底面全面积的一半;b.基础对地基的最大压应力不得大于地面许用压应力[],一般取:[]=2×105—3×lPa.2.ilf1处于对角方向(1)基础开始脱离地基时偏心距e的临界值.图2所示截面几何特性:面积:A=2ab一0抗弯模量:=由=导一面M1=o,M=&得:e:篆锅q工Iq!—=[=[士]二]二]=口:圈2设计?制造令a=詈,卢=詈,并分别定义为基础底面宽度系数和偏心系数(下同).代人上式得:卢:(1)62P一(一口),tlp~i卢≤时,基础的承力面积为基础的全面积.此时:孟(+),令=kG,为压应力系数(下同),则:=+__(2)(2)基础承力面积为全面积的一半时的偏心距e值(口值).如图3所示,由静力关系和几何关系得:IG:Jd,【M=j=由≥枷一式中,,Sr分别为图示阴影面积(承力面积) 对Y轴的惯性矩和静矩.,y=,曲:孚得…由a=詈,fl=詈,得:卢=等(3)当6≥L≥时值).G=~fl』xdt"+)…【,=』G(e+)则{得』=岛一()llgS—n,n=+^(一)=丁OL2+号(6一n)(2L一6)令y=,y为承力宽度系数(下同).得:器搴㈩一(4)当≥L≥b时,最大压应力g值(如图5所示,同(3)条讨论,则譬+(2L一6s,(3)s竽+(2L-b+a最大压应力q值(得如图4所示,由静力关系和几何关系得31271一(一2)12口y+(一口)(+口一),/4y+(1一口)一47(1一口)(5)t羲枫攮撇fl}裹1设计?制造O晒O.1O015O.加O.25O30O.35040k77777^77p时.川-o'一2.+l+O.09097491.0O.辨l61.0620.10O9l871121O93641.1270.哪!.13209769ll38O.99851.145O.1l0.86卯l_l辨088391.加l09D44l_强O螂l勰094931.2050.9725l_2|O0.99571.217 0.12O.81.701.狮0.8351l284O黜 1.瑚O.87831.2760.90201273O9264l_2730.95071.2760.97471.2∞O.130硼 1.3840.硼.770.81101.3670831.3s70.851.349O.88241.343O90751.3410.932513430.140.73501.490075141.4780.77∞1.462079251.446081621.431O.84111420O86661.41208l1.4O90.15O.珊1.602O.7l国l娜O7350l_5640.7557l542O.7785l52lO.蚴1.仰O.啦1.489O 螂1.480O.160.彻 1.719O.6盯1169907a371673O.删I.6440.7446161607681l5920.7927l_57l0.818015570.17064951840O.66151.8l7O.66l7850.09431.75lO.7l451.717O.7371686O7∞l6590.78491.639O.180.渊l965O1.蝴O.65301.902O.66鲫l8O.6g791.8篮0.70861.7840.73101.752O.75461.725O.19O.61112.09lO.铡206lO.∞2.0.64741.O.l931O68381聊0.70471.螂O.珊1815O.加059鹋 2.219O.雠2l870.61512143O.62842.00.644O2.042O.66l71992O醴l21.947O.砌1909O.2l058252O58992.3I40.Y)972.2061182212O606o2155O.能12.101O65982051067糖2.008O.翌O.57092.4790.57752442O船 2.∞10.597l2.333O.60舛2273062562.0000.882.I62O.656l2114O.056072.6100.56662570057442517O.58鹪2.463O.59332.397O6D492338061842.281O.63372.229O.24055l7274lO.2.7∞O.56342645O57002嚣8O57772.5280.5B712.468059842408061182.353O.250.54372,872054822.渤O.55272.779O.557o2724O56252.6670姗2,6060.57892.545O59∞2.4860.笳O.53653.O啤0.54OO2.9054222.9170.54442.80.54772.8l,055282.75405,992.92O.5693263lO27O.舢 3.137O.53193.1000.5318306lO弱 2.3017O5∽2.967{0.536329100541328O.54872.787O.2805241327lO.铆 3.24lO.52l63.2100.51983.173051913l29O.5∞3.077O.52蛇3018O52862蛳0.290.51843405051563386O5l153.365O.5沂83.3370.50533.300O洲3254O.,03.1辨0.,O893137(5)计算系数,y与a,口的关系表.参照GR1135-90第6.2.3条关于圆(环)形基础承受偏心载荷时的计算方法,由公式(2),(4),(5)可得十字形基础计算系数表(处于对角方向,a≤0.4),见表1.3Ml处于基础正方向(1)基础开始脱离地基时偏心距e的临界值.毫筑规镰撇(1)圈6图6所示截面几何特性面积:A=2ab一.抗弯模量:==垣j由一M1=o,M1=&设计?制造得…鲁同2(1)讨论口=即当卢≤积为基础全面积,!±些二13(1+a)(2一.)时,基础承力面此时=三(+号),令=,则:=+㈤(2)基础承力面积为全面积的一半时的偏心距e值(口值).同2(2)条讨论:e:妾,G=r..3+3一d'打——广,(b2_a2)+.由a=,卢=詈,q=kG;得:l+a2--a3...4讨论结果分析及抗倾翻稳定性计算(1)偏心距e允许值[口].根据"基础承力面积不低于基础总面积一半"的原则,偏心距e的允许值应取为_!If.矢量方向处于对角方向和正方向两种工况的较小值.由上述讨论中(3),(7)式可以看出:当acO.612时,其30允许值应按肼处于正方向来计算,即按(7)式计算,卢=≤[卢]=il+丽a2-a3,(式中各项参数同前述)(2)对基土最大压应力(值).基础对地面最大压应力应取为J=l,1矢量方向处于对角方向和正方向两种工况中的较大者.由上述讨论,并以上述方法对_!If.处于正方向时,各种情况下最大压应力理论推导计算(从略),分析可以得出:当a≤0.33,卢≤[卢]=时,应按_!If.处于对角方向来计算;在0.33<Gt≤O.4, 且≤[卢]条件下,若按_!If1处于对角方向计算,其计算值仅仅在接近[卢】时的较小区域内,略小于按_!If.处于正方向的计算值,其误差不大于4%.为计算方便在.≤O.4时,基础对地面的最大压应力均按_!If.处于对角方向计算.即:Pe=≤[],其中系数由表1查取,其他各项参数同GB/T13752—92.(3)举例计算.某塔机在GB/T13752-92规定的某工况下,=508.6kNm,+=442.6kN,=12.8kN,采用十字形混凝土基础,d=1m,b=5.657m,h:0.8m,[]=2.5xlosPa,验算其抗倾翻稳定性.解:口詈0?1768:-0.2072一b(+)一=1+tr2-tr3=o..'<[卢]...符合要求.由a=0.1768,口=O.2072,查表1得:k;2.204.=壶:1.72×lOs(Pa)<[]=2.5×lOsPa.?.符合要求.何学功,冯功斌,山东省建筑科学研究院,2~0031济南市无影山路凹号孙刚,收稿日期编辑0D_.帅6孔庆璐管理办公室。
塔吊的受力资料分解

塔吊分析报告——理论力学车辆工程(3)班李晓学号:********程驰学号:********乔同超学号:********张兴华学号:********总述1.塔吊综述1.1塔吊外型1.2塔吊的组成1.3我国塔吊发展历程1.4塔吊的作用1.5塔吊结构图1.6塔吊的分类示例2.塔吊分析2.1塔吊静力学分析2.2塔吊运动学分析2.3塔吊动力学分析3. 塔吊常见事故分析及对策3.1 塔吊重大事故分析3.2 对策4. 塔吊现存问题及发展前景4.1 我国塔式起重机存在的主要问题4.2 塔吊的未来发展前景5. 小组总结★1.塔吊综述1.1塔吊外型塔吊,即塔式起重机(如图1-1所示),机身很高,像塔,有长臂,轨道上有小车,可以在轨道上移动,工作面很大,主要用于建筑工地等处。
1.2塔吊的组成塔吊一般由外套架、回转轴承、塔冒、平衡臂、平衡臂拉杆、起重臂(吊臂)、起重臂拉杆、电源、支架、变幅小车,起重吊钩、驾驶室等几部分组成。
另外工作时塔机安全装置还应主要包括:行程限位器和荷载限制器。
行程限位器有:起升高度限位器、回转限位器、幅度限位器。
荷载限制器有:起重力矩限制器、起重量限制器此外还应包括风速仪。
1.3我国塔吊发展历程塔式起重机是我们机械建筑的关键设备,在建筑施工中起着重要作用,图1-1 塔吊实物图我国的塔吊制造如今已跻身于当代国际市场。
五十年代初,我国塔机的制开始起步,生产的是一些小型塔机,六十年代自行设计制造了25TM、40TM、60TM、160TM四种机型,多以摆臂为主;七十年代,随着高层建筑发展,对施工机械提出了新的要求。
于是,160TM附着式、45TM内爬式、120TM自升式等都由我国自己设计并制造;八十年代,国家建设突飞猛进,建筑用最大的250TM塔机也应运而生。
特别是1984年,首先在北京建工集团建机厂引进世界先进的法国POTAIN(波坦)公司技术并于次年成功试制了FO/23B塔机,这可以说是我国塔机发展史的里程碑,它大大缩短了我国与国外的差距,使我国塔机发展步入快行道。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
塔吊分析报告——理论力学车辆工程(3)班李晓学号:********程驰学号:********乔同超学号:********张兴华学号:********总述1.塔吊综述1.1塔吊外型1.2塔吊的组成1.3我国塔吊发展历程1.4塔吊的作用1.5塔吊结构图1.6塔吊的分类示例2.塔吊分析2.1塔吊静力学分析2.2塔吊运动学分析2.3塔吊动力学分析3. 塔吊常见事故分析及对策3.1 塔吊重大事故分析3.2 对策4. 塔吊现存问题及发展前景4.1 我国塔式起重机存在的主要问题4.2 塔吊的未来发展前景5. 小组总结★1.塔吊综述1.1塔吊外型塔吊,即塔式起重机(如图1-1所示),机身很高,像塔,有长臂,轨道上有小车,可以在轨道上移动,工作面很大,主要用于建筑工地等处。
1.2塔吊的组成塔吊一般由外套架、回转轴承、塔冒、平衡臂、平衡臂拉杆、起重臂(吊臂)、起重臂拉杆、电源、支架、变幅小车,起重吊钩、驾驶室等几部分组成。
另外工作时塔机安全装置还应主要包括:行程限位器和荷载限制器。
行程限位器有:起升高度限位器、回转限位器、幅度限位器。
荷载限制器有:起重力矩限制器、起重量限制器此外还应包括风速仪。
1.3我国塔吊发展历程塔式起重机是我们机械建筑的关键设备,在建筑施工中起着重要作用,图1-1 塔吊实物图我国的塔吊制造如今已跻身于当代国际市场。
五十年代初,我国塔机的制开始起步,生产的是一些小型塔机,六十年代自行设计制造了25TM、40TM、60TM、160TM四种机型,多以摆臂为主;七十年代,随着高层建筑发展,对施工机械提出了新的要求。
于是,160TM附着式、45TM内爬式、120TM自升式等都由我国自己设计并制造;八十年代,国家建设突飞猛进,建筑用最大的250TM塔机也应运而生。
特别是1984年,首先在北京建工集团建机厂引进世界先进的法国POTAIN(波坦)公司技术并于次年成功试制了FO/23B塔机,这可以说是我国塔机发展史的里程碑,它大大缩短了我国与国外的差距,使我国塔机发展步入快行道。
通过消化、吸收国外先进技术,我国自行研制的QTZ80、QTZ120两种机型已达到国外八十年代同类产品的水平;进入九十年代,现代化进程不断地加快,国内外市场对塔机的要求越来越高,众多城市大型建筑、水利、电力、桥梁等工程不断增加,市场的要求加快了新产品开发的力度,先后有400TM、900TM水平臂和300TM动臂式塔机,主要性能达到了国外九十年代水平,这一系列的塔机的开发不但填补了国内空白,而且替代和减少了大型塔机的进口数量。
回顾50年发展史,我国塔机行业从无到有,从小到大,逐步形成了较为完整的体系,我国增幅最快的新兴行业之一,特别是改革开放以来,塔机行业在设计、制造、管理和市场开拓等方面已形成一套较为健全的机制,以目前我国300余家生产塔机厂家为计,取得生产许可证的达100余家,近几年,塔机产量高升不下,2001年产量9309台,2002年10580台,今年市场需求量在20000台,就总体而言,我国已成为世界民用塔机的生产大国,也是世界塔机主要需求市场之一。
1.4塔吊的作用塔吊一般用于建筑施工、货物搬运、部分事故现场处理等场合,主要作为材料、货物等的高空运输或质量较大物体的运送的工具。
1.5塔吊结构图根据塔吊的组成、用处及发展历程,我们可以对塔吊的结构有一个更加深入的了解。
如下图1-2塔吊的主体结构模型图所示,塔吊的各个部分均已经标出在图上。
图1-2 塔吊主体结构模型1.6塔吊的分类示例实际工作中的塔吊多种多样,现略仅举几例以示说明。
图1-3QTZ31.52系列塔吊图1-4QTZ40、100系列塔吊★2.塔吊分析2.1塔吊静力学分析:OW2W1WbF a F b图2-1 塔吊静力学模型如右图为塔式起重机受力分析图,各种参数均已在图中标出,对此进行受力分析。
对图2-1先考虑满载时的情形,对塔吊整体为研究对象.要保证机身满载是平衡而不向右倾倒,则必须∑M B=0, W2(a+b)-F A b-W1-W max l max=0;限制条件F A≥0.再考虑空载时的情形,这时W=0. 要保证机身空载时平衡而不向左倾倒,则必须满足平衡方程:∑M A=0, W2 a+F B b-W1限制条件F B≥0.对图2-2塔吊的平衡臂,由平衡条件得:∑F x=0, F1cosθ=F x;∑F y=0, F1sinθ+F y=W2+m1g; W2 ∑M=0, (F1sinθ-W2)l1=m1gl2;图2-2塔吊平衡臂受力情况图2-3 塔吊吊臂受力情况 图2-4 塔吊塔帽与拉杆的受力情况Ⅳ: 如图2-3塔吊吊臂,由平衡条件得:∑Fx=0, F x =F 2cos α F 2 F 3+F 3cos β; F X∑F y =0, F 2sin α+ F `y l 3F 2sin β+F `y =m 2g+W ; l 5 m 2g ∑M=0, F 2sin αl 3+ l WF 3sin βl 4=m 2gl 5+Wl . l 4yⅤ:如图2-4塔吊吊帽与拉杆的受力 o情况,则由共点力的平衡条件可得 x 平衡方程如下:F 1 F F 2 F 3∑Fx=0, F 1cos α=F 2cos β+ F 3cos γ∑F y =0, F 1sin α+F 2sin β+ F 3sin γ=FF风力V2/a2MV1/a1FMg2.2塔吊运动学分析:★:如上图2-5塔吊的运动学模型图所示,塔吊的运动情况有几个分运动组成。
以下进行详细分析说明。
Ⅰ:重物分运动的情况:① 重物在塔吊吊索的提升下在竖直方向向上或向下平动; ② 重物在变幅小车的作用下沿水平方向向左或向右平动; ③ 在旋转机构的作用下塔吊吊臂在水平面内转动,从而 带动重物在水平面上转动。
Ⅱ:在三维空间坐标系下,重物相对于固定参考系的运动情况:z以地面作为固定参考系,连体基建立在塔吊吊臂上。
当重物同时参与三个分运动时,则重物的绝对运动是重物三 y个分运动的合运动,这种运动有点复杂,且不容易进行操控。
一般情况下塔吊在工作时,不同时参与三个分运动,基本上是x 一个或两个运动的合成,这样容易操控,且不容易出现危险。
O Ⅲ:重物运动时的速度分析:在塔吊工作时,重物一般情况下都应该是匀速运动,则根据速 度合成法重物的绝对速度就等于两个平动速度和一个转动速度的合 速度。
当有加速度时,同样根据 加速度合成法重物的绝对加速度就 等于两个平动加速度和一个转动加速度的合加速度。
Ⅳ:重物运动情况详细描述:★:重物在实现从一个地点到另一个地点的运动时,大致可以分为三种运动情况,先对其进行详细说明。
① 首先,重物在塔吊吊索的提升下竖直上升运动,先匀加速,后匀速,再匀减速,当到达所需高度时,重物停止上升;其次,变幅小车沿吊臂运动,带动小车平动,当到达所需位置时,重物停止平动;再次,吊臂在旋转装置的作用下旋转,带动重物旋转到所需位置的正上方,停止旋转;最后,吊索带着重物下降到所需地点。
图2-5 塔吊的运动学及动力学模型图2-6这种重物转移方式是最简单的方式,既容易操作,又很安全,但是有一点不好就是很费时间。
如下图2-7所示:该图表示的是这种运动情况下重物的运动路径。
zyxO图2-7②首先,重物在塔吊吊索的提升下竖直上升运动,先匀加速,后匀速,再匀减速,当到达所需高度时,重物停止上升;其次,变幅小车沿吊臂运动,带动小车平动,同时,吊臂在旋转装置的作用下旋转,带动重物旋转,直到将重物移动到所需要的位置的正上方为止。
最后,吊索带着重物下降到所需地点。
这种重物转移方式是有点相对复杂的方式,操作相对容易,也很安全,并且也很节约时间,使一种比较好的操作方式。
但是变幅小车和吊臂在同时运动时,应当尽量匀速,且速度不要太大,加速度要很小,防止产生过大的惯性力,造成危险事故。
如下图2-8所示:该图为变幅小车和吊臂在同时运动时重物运动的速度情况V=Ve+VrzyωVeO Vr x图2-8如下图2-9所示:该图为变幅小车和吊臂在同时运动时重物运动的加速度情况a=a e+a r+a czya e ωO a r xa c图2-9③重物在塔吊吊索的提升下竖直上升运动,同时,变幅小车沿吊臂运动,带动小车平动,吊臂在旋转装置的作用下旋转,带动重物旋转,直到将重物移动到所需要的位置的正上方为止。
然后,吊索带着重物下降到所需地点。
这种重物转移方式很复杂,虽然很节约时间,但操作很困难,且对操作人员的技术要求相当高。
另外这种转运方式也不很安全,容易出现事故,是一种不太好的操作方式,塔吊工作时应当尽量避免这种操作,防止产生危险事故。
如下图2-10、2-11所示:该图为重物、变幅小车和吊臂在同时运动时重物运动的速度和加速度情况zzy y a1v222 ω ωa3 xO v1 v3 x O a2 a42.3塔吊动力学分析:★:如上图2-5所示为塔式起重机的动力学模型图,塔吊所受各种动力及运动的情况均已在图中标出,现对此进行动力学分析。
Ⅰ:动力情况:①塔吊受到动力装置提供的动力矩M 的作用。
②重物自身受重力Mg 作用。
③塔吊工作时还要考虑风力的作用,即受F 风力的作用。
④重物受到吊索提升的力F 的作用。
Ⅱ:动力分析:① 变幅小车带动重物以速度V 0水平匀速运动,由于突然刹车,重物会因惯性绕O 点向前摆动,这时会产生很 O 大的惯性力。
F变幅小车刹车后,取自然坐标系如右图2-12所示, 列运动微分方程: Fmg dv/dt=-mg sin θ ① θ mg v/l=F-mg cos θ ②由式②得:F =mg (cos θ+v /gl)其中v 及cos θ均为变量。
由式①知重物做减速运动,故可判断出在初始位置θ=0时吊索的拉力最大,最大为: V 0 F max=mg (1+v 0 /gl) mg mg考虑到刹车前吊索拉力即为静拉力F 0=mg ,于是动荷因数图2-10 图2-11图2-122Kd=F max/ F0=1+v0 /gl可见,为了避免吊索产生过大的附加动拉力,变幅小车的行走速度不能太大,应力求平稳;在不影响塔吊工作安全的条件下,吊索尽量长些,以减小动荷因数。
②如图2-13所示重物在吊索的提升力F的提升下加速向上运动F=mg(1+a/g)可见在一般情况下,吊索动拉力由两部分组成,一部分是提升重物的静拉力,另一部分是由于加速度而引起的附加动拉力。
F以Kd表示动荷因数,则:a Kd=1+a/g它表示重物加速运动时动拉力与静拉力之比值。
如果加速度越大,则动荷因数越大,吊索拉力就越大,因此在设计和使用塔吊时应注意动荷因数的影响。
图2-13mg③如下图2-14所示,重物在吊索的提升下随吊臂的旋转而做旋转运动。
ωθFω图2-142V mg当重物随吊臂以ω旋转时,要产生摆角θ来使F 与mg 的合力为重物的旋转提供向心力,由此可知:F=mg tan θ=ml sin θ ω则当吊臂旋转时,应该使角速度尽量的小,尽可能没有角加速度,以防止重物旋转时产生过大的向心力,对塔吊整体施加过大的惯性力和惯性力矩,从而降低工作危险。