基于MATLAB的点特征提取
matlab特征提取
matlab特征提取Matlab 特征提取指的是使用Matlab软件计算机视觉技术,以及建立目标特征从图像或视频中自动提取的过程,是计算机视觉领域的重要功能,与图像处理及机器学习关系密切。
Matlab特征提取算法可以将图像中不同目标区域分隔开,比较它们之间的差异,分析出图像中特定目标的特征。
它是一种无监督式学习,能够自动分析图像,而不需要人为标注或指导。
特征提取算法通过分析图像中各个点属性特征和周围区域的周期,相关性以及特定的纹理,能够把一张图像分割出非常复杂的内容区域。
下面以Matlab中的语言为参考,介绍Matlab如何计算机视觉,建立目标特征从图像或视频中自动提取的过程以及如何在特征提取中应用Matlab软件。
首先,Matlab可以使用图像金字塔去模糊提取图片中的复杂信息。
图像金字塔是一种随着图像尺寸减小而变模糊的图像处理技术,它可以将原始图像信息分解成不同层次的细节。
其次,Matlab可以利用不同类型的形状归类器,从图像中提取特定的形状特征。
通常说来,我们需要对输入图像进行彩色处理,使特定的形状特征便于识别。
但是如果处理的图像中的面无明显的形状,可以考虑采用二值化技术来处理图像,其中颜色转换会把图像中的灰度替换为二进制值。
之后,Matlab还可以使用特征提取函数提取图像中的特征。
这些函数可以对图像中的每一个点进行特征运算,以提取特定目标的特征。
在提取特征的过程中,特定的尺度、形状和旋转角度信息也会被考虑到。
最后,Matlab还可以提供训练数据有效的存储空间,以及绘制Matlab的决策图来理清各个特征的关系。
并且根据决策图,可以进一步缩小提取特征的范围,避免对比每一个元素提取特征的时间浪费。
总而言之,利用Matlab来进行特征提取可以大大提高定位目标特征的效率,并且可以改进算法来提高图像处理和分析的能力。
也因此,Matlab特征提取在计算机视觉技术中扮演着不可替代的重要角色。
matlab 特征提取

matlab 特征提取英文回答:Feature extraction is a crucial step in data analysis and pattern recognition tasks, including machine learning and computer vision. It involves transforming raw data into a set of representative features that capture the essential characteristics of the data. These features can then be used to train models or make predictions.There are various techniques available for feature extraction in Matlab. One common approach is to use statistical measures such as mean, standard deviation, and skewness to describe the distribution of data. For example, if we have a dataset of images, we can extract features such as the average pixel intensity, the variance of pixel values, and the histogram of pixel intensities.Another popular technique is to use transform-based methods, such as Fourier Transform or Wavelet Transform, toextract frequency or time-domain features. For instance, in speech recognition, we can extract features such as Mel-Frequency Cepstral Coefficients (MFCCs) using the Fourier Transform.In addition to these traditional techniques, Matlab also provides advanced feature extraction methods based on deep learning. Deep learning models, such as Convolutional Neural Networks (CNNs), can automatically learn features from raw data without the need for manual feature engineering. For example, in image classification tasks, a CNN can learn to extract features such as edges, textures, and shapes from images.中文回答:特征提取是数据分析和模式识别任务中的关键步骤,包括机器学习和计算机视觉。
特征选择、特征提取MATLAB算法实现(模式识别)

特征选择、特征提取MATLAB算法实现(模式识别)6特征选择6.1问题对“threethreelarge.m”数据,采⽤任意⼀种特征选择算法,选择2个特征6.2思路采⽤简单特征选择法(simple feature selection approach),⾸先计算每⼀个特征的分类能⼒值,再选择出其中最⼤分类能⼒的l个特征。
6.3结果eigs=8.92340.00000.0767SelectedFeature=13也就是说,选取x和z坐标作为特征。
6.4代码%特征选择代码,见FSthrthrlrg.m⽂件m1=[0,0,0];m2=[0,0,0];m3=[0,0,0];m=[0,0,0];for i=1:200m1(1)=m1(1)+(x1(i,1)-m1(1))/i;m1(2)=m1(2)+(x1(i,2)-m1(2))/i;m1(3)=m1(3)+(x1(i,3)-m1(3))/i;end;for i=1:190m2(1)=m2(1)+(x2(i,1)-m2(1))/i;m2(2)=m2(2)+(x2(i,2)-m2(2))/i;m2(3)=m2(3)+(x2(i,3)-m2(3))/i;end;for i=1:210m3(1)=m3(1)+(x3(i,1)-m3(1))/i;m3(2)=m3(2)+(x3(i,2)-m3(2))/i;m3(3)=m3(3)+(x3(i,3)-m3(3))/i;end;m(1)=(m1(1)+m2(1)+m3(1))/3;m(2)=(m1(2)+m2(2)+m3(2))/3;m(3)=(m1(3)+m2(3)+m3(3))/3;sw1=zeros(3,3);sw2=zeros(3,3);sw3=zeros(3,3);sw=zeros(3,3);sb=zeros(3,3);for i=1:200sw1=sw1+([x1(i,1),x1(i,2),x1(i,3)]-m1)'*([x1(i,1),x1(i,2),x1(i,3)]-m1);end;for i=1:190sw2=sw2+([x2(i,1),x2(i,2),x2(i,3)]-m2)'*([x2(i,1),x2(i,2),x2(i,3)]-m2);end;for i=1:210sw3=sw3+([x3(i,1),x3(i,2),x3(i,3)]-m3)'*([x3(i,1),x3(i,2),x3(i,3)]-m3);end;N1=200;N2=190;N3=210;N=N1+N2+N3;p1=N1/N;p2=N2/N;p3=N3/N;sw1=sw1/N1;sw2=sw2/N2;sw3=sw3/N3;sw=p1*sw1+p2*sw2+p3*sw3;sb=p1*(m1-m)'*(m1-m)+p2*(m2-m)'*(m2-m)+p3*(m3-m)'*(m3-m);s=inv(sw)*sb;j1=trace(s)eigs=eig(s)';eigsIndex=[1,2,3];%冒泡法排序,注意的是特征值顺序变化的同时要与相对应的下标同步for i=1:3for j=i:3if(eigs(i)eigstemp=eigs(i);eigs(i)=eigs(j);eigs(j)=eigstemp;eigsIndextemp=eigsIndex(i);eigsIndex(i)=eigsIndex(j);eigsIndex(j)=eigsIndextemp;end;end;end;%降序排列后的特征值,直接选取前L个特征SelectedFeature=[eigsIndex(1),eigsIndex(2)]%FSthrthrlrg.m程序结束6.5讨论从实验结果中我们可以看到y特征的分类能⼒最⼩,这⼀点可以从实验数据中得到验证——三类数据在y⽅向的分布⼏乎是相同的(见下图)。
matlab sift角点提取
标题:MATLAB中的SIFT角点提取一、介绍SIFT角点提取SIFT(Scale-Invariant Feature Transform)是一种用于计算图像局部特征的算法,它能够在不同尺度和旋转下保持稳定性,并且对于光照变化具有一定的鲁棒性。
SIFT角点提取算法是计算机视觉领域中十分重要的一部分,能够对图像中的关键点进行稳健提取,因此在图像配准、目标检测和三维重建等领域有着广泛的应用。
二、MATLAB中的SIFT角点提取函数在MATLAB中,可以通过vlfeat工具箱来实现SIFT角点提取。
vlfeat 是一个视觉库,其中包括了SIFT、SURF等经典的图像特征提取算法。
具体来说,vlfeat中提供的函数vl_sift可以用于在MATLAB环境下实现SIFT特征提取。
通过调用vl_sift函数,在图像中提取出关键点的坐标、尺度和方向信息,并计算出各个关键点的描述子。
三、MATLAB中如何进行SIFT角点提取1. 准备图像数据在使用MATLAB进行SIFT角点提取之前,首先需要准备好图像数据。
可以使用imread函数读取图像,将其转换为灰度图像或彩色图像均可。
2. 加载vlfeat库通过MATLAB的addpath函数将vlfeat库添加到MATLAB的工作路径中,以便调用其中的函数。
3. 调用vl_sift函数使用vl_sift函数可以对图像进行SIFT角点提取,其调用方式如下:[f, d] = vl_sift(I)其中I为输入的图像,f为提取出的特征点信息,d为各个特征点的描述子。
4. 可视化可以通过vl_plotframe函数将提取出的关键点在图像上进行可视化显示,以便于观察提取结果。
四、SIFT角点提取的应用示例SIFT角点提取在图像配准中有着广泛的应用,下面以图像配准为例进行说明。
1. 加载图像加载两幅待配准的图像,通常我们会选择一幅作为基准图像,另一幅作为待配准图像。
2. SIFT角点提取对两幅图像分别调用vl_sift函数,提取出它们的SIFT特征点。
Matlab中的特征提取与选择方法

Matlab中的特征提取与选择方法概述:特征提取与选择是机器学习和模式识别中非常重要的环节,它们涉及到从原始数据中提取有用的信息,并选择最具代表性的特征。
在Matlab中,提供了丰富的工具和函数来实现这些任务。
本文将介绍一些常用的特征提取和选择方法,并通过实例展示它们在实际应用中的效果。
一、特征提取方法1. 基于频域的特征提取频域特征提取通过将信号从时域转换到频域来获取更多的特征信息。
Matlab中的fft函数可以实现信号的傅里叶变换,得到频谱和相位信息。
常用的频域特征包括功率谱密度、频率峰值等。
例如,我们可以使用Matlab中的fft函数对音频信号进行频域特征提取,得到不同频率区间的能量值,从而实现音频的声音识别或分类任务。
2. 基于时域的特征提取时域特征提取是在时序数据中提取特征。
Matlab中的一些函数,如mean、var 等,可以计算时域特征,如均值、方差等。
例如,在心电图数据中,我们可以使用Matlab中的mean函数计算心率的平均值,通过比较不同人群的平均心率,可以判断身体健康状况。
3. 基于图像的特征提取图像特征提取是在图像数据中提取特征。
Matlab中提供了丰富的图像处理函数和工具箱,可以实现图像的边缘检测、纹理分析等。
例如,在图像分类任务中,我们可以使用Matlab中的SIFT(尺度不变特征变换)算法提取关键点和描述子,从而实现图像匹配和识别。
二、特征选择方法1. 过滤式特征选择过滤式特征选择是在特征提取之后,通过一些评价指标对特征进行筛选,选择最有代表性的特征。
Matlab中的corrcoef函数可以计算特征之间的相关性,并根据相关性来选择特征。
例如,在某个肿瘤分类任务中,我们可以使用Matlab中的corrcoef函数计算各个特征与肿瘤类型之间的相关性,选择与肿瘤类型相关性最高的特征进行分类。
2. 包裹式特征选择包裹式特征选择是通过构建一个评估器,将特征选入或排除出模型,使用模型的性能来评估特征的重要性。
matlab 特征提取 降维

matlab 特征提取降维特征提取和降维是机器学习和模式识别中非常重要的一步,它们可以帮助我们从复杂的数据中提取出最具代表性的特征,并减少数据维度,提高算法的性能和效率。
在Matlab中,有许多功能强大的工具箱和函数可以用于特征提取和降维,本文将详细介绍其原理和应用。
1.特征提取特征提取是将原始数据转换为一组有意义且易于理解的特征的过程。
在机器学习和模式识别任务中,这些特征通常是数据中最有区分性和相关性的部分。
下面是一些常用的特征提取方法:1.1统计特征统计特征是从数据的统计分布中提取的。
例如,平均值、方差、标准差等都可以作为数据的统计特征。
在Matlab中,可以使用`mean`、`var`、`std`等函数来计算这些统计特征。
1.2傅里叶变换特征傅里叶变换是将信号从时域转换到频域的过程。
通过对信号进行傅里叶变换,可以提取出信号的频率特征。
在Matlab中,可以使用`fft`函数进行傅里叶变换,然后提取频域中的特征。
1.3小波变换特征小波变换是将信号从时域转换到时频域的过程。
它可以提供信号的时间和频率信息。
在Matlab中,可以使用`cwt`函数进行小波变换,然后提取时频域的特征。
1.4图像特征对于图像数据,可以使用各种图像处理算法来提取特征。
例如,边缘检测、角点检测、纹理分析等都可以作为图像的特征。
在Matlab 中,可以使用`edge`、`corner`、`texturefilt`等函数来提取这些图像特征。
1.5神经网络特征神经网络是一种强大的模式识别工具,可以通过学习数据的潜在规律来提取特征。
在Matlab中,可以使用`trainAutoencoder`和`encode`函数来训练和使用自编码器来提取数据的特征。
2.降维降维是将高维数据映射到低维空间的过程,可以减少数据的维度并保留最有代表性的特征。
常用的降维方法有以下几种:2.1主成分分析(PCA)PCA是一种经典的线性降维方法,通过找到原始数据中方差最大的方向来进行降维。
matlab 点云曲面特征提取

一、概述在三维空间数据处理领域,点云曲面特征提取是一个重要的课题。
点云是由大量的三维坐标点构成的数据集,它可以用来描述三维空间中的物体的形状和结构。
曲面特征提取是指从点云数据中提取出物体表面的各种特征,例如曲率、法向量等,这些特征对于物体的识别、分割和重建具有重要意义。
Matlab作为一种强大的数学建模与仿真软件,提供了丰富的工具箱和函数,能够有效地进行点云曲面特征提取。
二、点云曲面特征提取的方法1. 曲率计算曲率是描述曲面弯曲程度的重要指标,能够帮助我们了解物体的表面特征。
在Matlab中,可以使用曲率计算函数来对点云数据进行曲面特征提取。
通过计算每个点的曲率,可以得到曲面的凹凸部分,进而进行曲面识别和重建。
2. 法向量估计法向量是描述曲面方向的重要特征,对于曲面的识别和分割非常有用。
在Matlab中,可以使用法向量估计函数对点云数据进行法向量计算。
通过估计每个点的法向量,可以得到曲面的朝向,帮助我们更好地理解曲面的结构和特征。
3. 边缘提取边缘是描述物体形状的重要线索,对于物体的识别和重建非常有帮助。
在Matlab中,可以使用边缘提取函数对点云数据进行边缘检测。
通过提取点云数据中的边缘信息,可以帮助我们更好地理解物体的形状和结构。
三、点云曲面特征提取的应用1. 工业制造在工业制造领域,点云曲面特征提取可以帮助工程师更好地了解产品的设计和加工情况,对产品的质量控制和生产过程优化具有重要意义。
利用Matlab进行点云曲面特征提取,可以帮助工程师更好地分析和处理产品的三维形状数据。
2. 地质勘探在地质勘探领域,点云曲面特征提取可以帮助地质学家更好地理解地下构造和岩层分布情况,对于矿产勘探和地质灾害预警具有重要意义。
利用Matlab进行点云曲面特征提取,可以帮助地质学家更好地分析和处理地质数据,提高勘探和预警效率。
3. 医学影像在医学影像领域,点云曲面特征提取可以帮助医生更好地分析和理解病人的三维影像数据,对于疾病诊断和治疗具有重要意义。
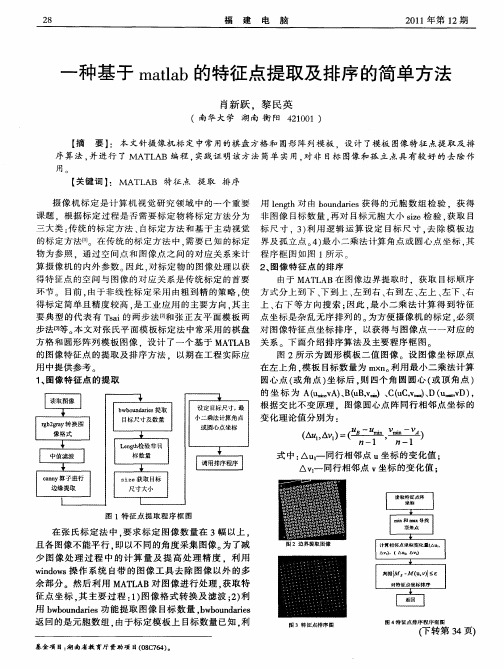
一种基于matlab的特征点提取及排序的简单方法
福
建 电
脑
21 0 1年第 1 2期
一
种 基 于 m t b的特 征 点 提 取 及 排序 的简 单 方 法 aa l
肖新 跃 .黎 民英
(南华大 学 湖 南 衡 阳 4 1 0 2 0 1)
序 算 法 , 进 行 了 MAT 并
用。
【 摘 要】 :本文针摄像机标定 中常用的棋盘方格和 圆形阵列模板 ,设计 了模板 图像特征点提取及排 编程 , 实践 证 明 该方 法 简单 实用 . 非 目标 图像 和孤 立点 具 有 较 好 的 去 除 作 对
I 寻 劬 找
计算 相邻 点 坐标 变 化 量f “ △u
△v ,(△u △v h
● Biblioteka 判 l M(,}£ 据^ 一 u ) V≤
对特 征 点坐 标捧 序
余 部分 。然后 利 用 MA L B对 图像 进行 处理 。 取 特 TA 获 征 点 坐标 , 主 要 过 程 :) 其 1 图像 格 式 转 换 及 滤 波 ;) 2 利
三大类 : 统 的标 定 方法 、 传 自标 定 方法 和 基 于 主动视 觉 标 尺 寸 ,3 利 用 逻 辑 运 算 设 定 目标 尺 寸 . 除 模 板 边 ) 去 的标 定方 法【 ” 。在传 统 的标 定 方 法 中 . 要 已知 的标 定 界及 孤 立 点 。 ) 小 二乘 法计 算角 点或 圆 心点 坐标 , 需 4最 其 物为 参照 .通过 空 间点 和 图像 点 之 间 的对 应关 系来 计 程序 框 图 如 图 1 示 所 算摄 像机 的 内外 参数 因此 . 对标 定 物 的 图像处 理 以获 2 图像 特 征 点 的排序 、 得特 征点 的空 间 与 图像 的对 应 关 系是 传统 标 定 的首 要 由于 MA L B在 图像 边 界提取 时 .获取 目标顺 序 TA 环节 。 目前 , 由于非 线 性标 定 采用 由粗到 精 的策 略 . 使 方式 分 上到 下 、 到上 、 到 右 、 到左 、 下 左 右 左上 、 下 、 左 右 得标定 简 单且 精 度较 高 , 工业 应 用 的 主要 方 向 . 主 上 、 下 等 方 向搜 索 ; 是 其 右 因此 , 小 二 乘 法计 算 得 到 特 征 最
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB点特征提取实习报告一、实习内容与目的理解影像中每个像素灰度值的概念;理解点特征在灰度方面的特点;掌握常用的点特征提取算子及其对应的点特征提取方法,例如Harris算子。
利用MATLAB软件分析任意一种应用于数字图像处理中的边缘检测算子,研究它的提取方法以及实现提取特征点。
二、实习原理基本思想:从图像局部的小窗口观察图像特征。
角点定义:窗口向任意方向的移动都导致图像灰度的明显变化。
Harris角点检测:数学描述将图像窗口平移[u,v]产生灰度变化E[u,v]由:得到:于是对于局部微小的移动量[u,v],可以近似得到下面的表达:其中,M是2*2矩阵,可由图像的导数求得:窗口移动导致的图像变化:实对称矩阵的特征值分析其中,的特征值M的特征值λmax、λmin。
定义角点响应函数:R其中Harris角点检测结果如下图所示:三、实习步骤及相关代码filename='yuantu2.jpg';X=imread(filename);%读取图像%imshow(X);Info=imfinfo(filename);%获取图像相关信息if(Info.BitDepth>8)f=rgb2gray(X);end%《基于特征点的图像配准与拼接技术研究》%计算图像亮度f(x,y)在点(x,y)处的梯度-----------------------------------------------%fx=[50-5;80-8;50-5];%高斯函数一阶微分,x方向(用于改进的Harris角点提取算法) ori_im=double(f)/255;%unit8转化为64为双精度double64fx=[-2-1012];%x方向梯度算子(用于Harris角点提取算法)Ix=filter2(fx,ori_im);%x方向滤波%fy=[585;000;-5-8-5];%高斯函数一阶微分,y方向(用于改进的Harris角点提取算法) fy=[-2;-1;0;1;2];%y方向梯度算子(用于Harris角点提取算法)Iy=filter2(fy,ori_im);%y方向滤波%构造自相关矩阵---------------------------------------------------------------Ix2=Ix.^2;Iy2=Iy.^2;Ixy=Ix.*Iy;clearIx;clearIy;h=fspecial('gaussian',[77],2);%产生7*7的高斯窗函数,sigma=2Ix2=filter2(h,Ix2);Iy2=filter2(h,Iy2);Ixy=filter2(h,Ixy);%提取特征点---------------------------------------------------------------height=size(ori_im,1);width=size(ori_im,2);result=zeros(height,width);%纪录角点位置,角点处值为1R=zeros(height,width);Rmax=0;%图像中最大的R值k=0.06;%k为常系数,经验取值范围为0.04~0.06fori=1:heightforj=1:widthM=[Ix2(i,j)Ixy(i,j);Ixy(i,j)Iy2(i,j)];%autocorrelationmatrixR(i,j)=det(M)-k*(trace(M))^2;%计算RifR(i,j)>RmaxRmax=R(i,j);end;end;end;%T=0.01*Rmax;%固定阈值,当R(i,j)>T时,则被判定为候选角点T=0.1*Rmax;%固定阈值,当R(i,j)>T时,则被判定为候选角点%在计算完各点的值后,进行局部非极大值抑制-------------------------------------cnt=0;fori=2:height-1forj=2:width-1%进行非极大抑制,窗口大小3*3if(R(i,j)>T&&R(i,j)>R(i-1,j-1)&&R(i,j)>R(i-1,j)&&R(i,j)>R(i-1,j+1)&&R(i,j)>R(i,j-1)&&... R(i,j)>R(i,j+1)&&R(i,j)>R(i+1,j-1)&&R(i,j)>R(i+1,j)&&R(i,j)>R(i+1,j+1))result(i,j)=1;cnt=cnt+1;end;end;end;i=1;forj=1:heightfork=1:widthifresult(j,k)==1;corners1(i,1)=j;corners1(i,2)=k;i=i+1;end;end;end;[posc,posr]=find(result==1);figure,imshow(ori_im);holdon;plot(posr,posc,'r+');>>filename='yuantu.jpg';X=imread(filename);%读取图像%imshow(X);Info=imfinfo(filename);%获取图像相关信息if(Info.BitDepth>8)f=rgb2gray(X);end%《基于特征点的图像配准与拼接技术研究》%计算图像亮度f(x,y)在点(x,y)处的梯度-----------------------------------------------%fx=[50-5;80-8;50-5];%高斯函数一阶微分,x方向(用于改进的Harris角点提取算法) ori_im=double(f)/255;%unit8转化为64为双精度double64fx=[-2-1012];%x方向梯度算子(用于Harris角点提取算法)Ix=filter2(fx,ori_im);%x方向滤波%fy=[585;000;-5-8-5];%高斯函数一阶微分,y方向(用于改进的Harris角点提取算法) fy=[-2;-1;0;1;2];%y方向梯度算子(用于Harris角点提取算法)Iy=filter2(fy,ori_im);%y方向滤波%构造自相关矩阵---------------------------------------------------------------Ix2=Ix.^2;Iy2=Iy.^2;Ixy=Ix.*Iy;clearIx;clearIy;h=fspecial('gaussian',[77],2);%产生7*7的高斯窗函数,sigma=2Ix2=filter2(h,Ix2);Iy2=filter2(h,Iy2);Ixy=filter2(h,Ixy);%提取特征点---------------------------------------------------------------height=size(ori_im,1);width=size(ori_im,2);result=zeros(height,width);%纪录角点位置,角点处值为1R=zeros(height,width);Rmax=0;%图像中最大的R值k=0.06;%k为常系数,经验取值范围为0.04~0.06fori=1:heightforj=1:widthM=[Ix2(i,j)Ixy(i,j);Ixy(i,j)Iy2(i,j)];%autocorrelationmatrixR(i,j)=det(M)-k*(trace(M))^2;%计算RifR(i,j)>RmaxRmax=R(i,j);end;end;end;%T=0.01*Rmax;%固定阈值,当R(i,j)>T时,则被判定为候选角点T=0.1*Rmax;%固定阈值,当R(i,j)>T时,则被判定为候选角点%在计算完各点的值后,进行局部非极大值抑制-------------------------------------cnt=0;fori=2:height-1forj=2:width-1%进行非极大抑制,窗口大小3*3if(R(i,j)>T&&R(i,j)>R(i-1,j-1)&&R(i,j)>R(i-1,j)&&R(i,j)>R(i-1,j+1)&&R(i,j)>R(i,j-1)&&...R(i,j)>R(i,j+1)&&R(i,j)>R(i+1,j-1)&&R(i,j)>R(i+1,j)&&R(i,j)>R(i+1,j+1))result(i,j)=1;cnt=cnt+1;end;end;end;i=1;forj=1:heightfork=1:widthifresult(j,k)==1;corners1(i,1)=j;corners1(i,2)=k;i=i+1;end;end;end;[posc,posr]=find(result==1);figure,imshow(ori_im);holdon;plot(posr,posc,'r+');上面是Harris角点检测的数学推导,通过查阅相关文献,对Harris角点检测的推导过程进行整理,其简要步骤如下:Harris角点检测器分为三步:梯度计算,矩阵形成和特征值计算。
首先,计算x和方向上的平滑(使用高斯函数)梯度来检测给定灰度图像中的角点,由下面的式子给出:其中,是平滑参数。
计算图像的平滑梯度为:其中,“”表示二维卷积运算。
Harris角点检测器依赖于计算一个矩阵(与自相关函数有关),由下面的式子给出:其中,从上面的式子可以看出,和表示平均梯度幅值,矩阵的特征值提供关于给定位置的边缘的信息。
如果给定位置的矩阵的特征值都很大,那么大部分区域均为角点。
Harris通过计算响应函数可以避免精确的特征值计算,由下面的式子给出:其中是可调参数,一般设置在区间[0.04,0.06]内。
通过判定R大小来判断像素点是否为角点,对于角点,的值很大;而平坦的区域,的值很小。
四、实习体会利用MATLAB软件可以大大的简化计算,可以直观迅速的得到所需要的结果。
MATLAB软件功能强大,通过本次综合设计更一步了解和掌握该软件的使用方法,更好的利用该软件解决一些比较复杂的问题。