机械手臂的结构设计(精选)
机械臂结构设计
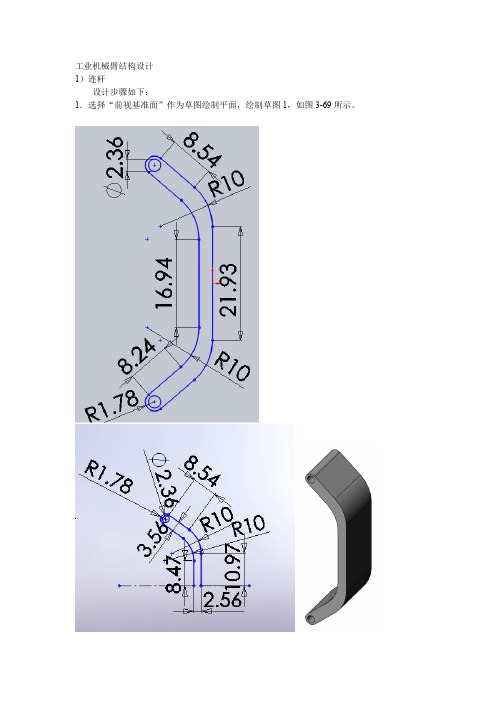
工业机械臂结构设计1)连杆设计步骤如下:1.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标,在属性管理器中输入:终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型1。
3.选择“右视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值61mm,确定,完成实体造型2。
5.选择图示边线,点选圆角特征按钮,添加半径为5mm的圆角。
完成连杆实体造型如图所示。
2)连接件11.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
3)连接件21.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型。
3.选择“上视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入终止条件:给定深度,拉伸高度值12mm,确定,完成实体造型2。
5.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
6.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。
7.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
8.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值12mm,确定,完成实体造型。
9.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
10.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。
11.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
12.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值20mm,确定,完成实体造型3。
13.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
14.点选拉伸特征图标,在属性管理器中输入终止条件:给定深度,拉伸高度值5mm,确定,完成实体造型。
机械手臂结构设计

机械手臂结构设计引言机械手臂是一种能够模拟人体手臂运动的机械装置,由多个关节和执行器组成。
机械手臂广泛应用于工业生产、医疗卫生、军事领域等多个领域。
在设计机械手臂的过程中,结构设计是至关重要的。
本文将介绍机械手臂的结构设计,包括材料选型、关节设计以及执行器设计等方面。
材料选型机械手臂的结构设计中,材料的选型是一个关键的考虑因素。
常用的材料包括金属、塑料和复合材料等。
对于机械手臂的关键部件,如关节和机械臂的骨架,通常选择高强度的金属材料,如铝合金或钢材。
这些材料具有良好的刚性和抗压能力,能够承受机械手臂在工作过程中的变形和载荷。
对于机械手臂的其他部件,如外壳和手部抓取装置,通常采用轻质的塑料材料。
塑料具有良好的韧性和耐磨性,能够减少机械手臂的自重,提高其运动效率。
此外,一些先进的机械手臂采用复合材料作为结构材料。
复合材料由两种或多种材料的组合而成,具有重量轻、强度高和耐腐蚀等优点。
复合材料在机械手臂的设计中能够提供更多的设计自由度,并且具有良好的机械性能。
关节设计机械手臂的关节设计是结构设计的核心部分。
关节是机械手臂的运动部件,具有转动和固定两种类型。
根据机械手臂的需要和设计要求,可以选择不同类型的关节。
常见的关节类型包括旋转关节、滑动关节和万向关节。
旋转关节允许机械手臂在水平和垂直方向上旋转,以实现多个角度的运动。
滑动关节允许机械手臂在水平方向上滑动,实现平移运动。
万向关节能够实现多个方向上的转动和滑动运动。
关节的设计要考虑到机械手臂的运动需求、载荷和精度要求。
需要确定关节的旋转角度范围、最大载荷和运动速度等参数。
在选择关节类型和设计参数时,需要综合考虑机械手臂的整体性能和成本等因素。
执行器设计执行器是机械手臂的驱动装置,用于控制机械手臂的运动。
常见的执行器类型包括电动执行器和液压执行器。
电动执行器是一种常用的执行器类型,具有结构简单、控制灵活和响应速度快等优点。
电动执行器通常采用电机作为动力源,通过齿轮传动或直接驱动实现机械手臂的运动。
机械臂结构设计原理
1—铰接活塞缸
手臂关节的回转运 动是通过液压缸-连 杆机构实现。控制
2—连杆 3—手臂 4—支承架
活塞的行程就控制
了手臂摆角的大小。
精品课件
齿轮驱动回转机构图例:
精品课件
3.关节型机械臂的结构(1)
存在的运动型式:
机身的旋转运动; 肩关节和肘关节的摆动; 腕关节的俯仰和旋转运动;
各运动的协调: 称为5轴关节型机器人。
液压伺服系统:
机械臂各关节的运动通常由液压伺服阀 控制液压缸实现。
电动伺服系统:
机械臂各关节的运动通常由步进电机或 直流电机驱动。
精品课件
肘关节局部图例:
电机M3→两级同步带传动B3、 B3′→减速器R3→肘关节摆动n3
伺服直线液压缸图例:
精品课件
电动伺服控制系统图例:
精品课件
精品课件
4.重量轻、转动惯量小:
为提高机器人的运动速度,要尽量减 少臂部运动部分的重量,以减少整个 手臂对回转轴的转动惯量。
精品课件
5.合理设计与腕部和机身的连接部位:
臂部的安装形式和位置不仅关系到机 器人的强度、刚度和承载能力,而且 还直接影响到机器人的外观。
精品课件
二、机械臂的运动形式
机械臂结构
精品课件
一、臂部设计的基本要求
精品课件
1.承载能力足:
手臂是支承手腕的部件,设计时不仅 要考虑抓取物体的重量或携带工具的 重量,还要考虑运动时的动载荷及转 动惯性。
精品课件
2.刚度高:
为了防止臂部在运动过程中产生过大 的变形,手臂的截面ห้องสมุดไป่ตู้状要合理选择。
工字型截面的弯曲刚度一般比圆截面
精品课件
1.直角坐标型:
机械设计基础中的机械手臂设计

机械设计基础中的机械手臂设计机械手臂是一种能模拟人手动作的机械装置,被广泛应用于自动化生产线、仓储物流和医疗辅助等领域。
机械手臂的设计涉及到机械结构、运动控制、传动系统等多个方面,本文将重点介绍机械设计基础中的机械手臂设计要点。
一、机械手臂的结构设计1. 动力系统设计机械手臂的动力系统通常由电动机、减速器和运动控制器组成。
在设计时,需要根据手臂的负载要求,选择合适的电动机和减速器,并考虑到运动控制的精度和稳定性。
2. 关节机构设计机械手臂的关节机构决定了它的运动范围和灵活度。
常见的关节机构包括旋转关节、摆动关节和滑动关节。
设计时需要考虑关节的运动范围、力矩要求以及机构的刚度和精度。
3. 末端执行器设计机械手臂的末端执行器根据实际应用需求,可以选择夹具、工具或传感器等不同类型。
设计时需要考虑到末端执行器的负载能力、精度等方面,以确保其能够有效完成所需操作。
二、机械手臂的运动控制1. 轨迹规划机械手臂的轨迹规划是指通过计算机控制,确定机械手臂末端在运动过程中的轨迹。
常用的轨迹规划方法包括直线插补、圆弧插补和样条插值等。
设计时需要根据具体任务要求选择适合的轨迹规划方法,并考虑到运动平滑性和精度要求。
2. 运动控制器设计机械手臂的运动控制器通常由传感器、控制算法和执行器组成。
传感器用于实时监测机械手臂的位置和姿态信息,控制算法负责计算运动轨迹和控制信号,执行器用于实际控制机械手臂的运动。
设计时需要选择合适的传感器和执行器,并优化控制算法,以实现稳定、精确的运动控制。
三、机械手臂的传动系统设计1. 传动机构选择机械手臂的传动系统通常由齿轮、链条、皮带等传动机构组成。
在选择传动机构时,需要考虑到负载要求、传动效率和精度等因素。
同时,还要根据机械手臂的结构特点,合理选择传动比和传动方式。
2. 传动装置计算机械手臂的传动装置需要进行计算,以确定齿轮、链条等传动部件的尺寸和参数。
通过计算,可以确保传动装置的强度和精度满足设计要求。
机械臂结构设计
工业机械臂结构设计1)连杆设计步骤如下:1.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标,在属性管理器中输入:终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型1。
3.选择“右视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值61mm,确定,完成实体造型2。
5.选择图示边线,点选圆角特征按钮,添加半径为5mm的圆角。
完成连杆实体造型如图所示。
2)连接件11.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
3)连接件21.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型。
3.选择“上视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入终止条件:给定深度,拉伸高度值12mm,确定,完成实体造型2。
5.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
6.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。
7.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
8.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值12mm,确定,完成实体造型。
9.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
10.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。
11.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
12.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值20mm,确定,完成实体造型3。
13.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
14.点选拉伸特征图标,在属性管理器中输入终止条件:给定深度,拉伸高度值5mm,确定,完成实体造型。
机械臂结构设计原理ppt

3.关节型机械臂的结构(1)
存在的运动型式:
机身的旋转运动; 肩关节和肘关节的摆动; 腕关节的俯仰和旋转运动;
各运动的协调: 称为5轴关节型机器人。
五轴关节型机器人手臂运动图例(1):
俯仰 偏转 肘转
肩转
腰转
腰转姿态
五轴关节型机器人手臂运动图例(2):
肩关节、肘关节与手腕的协调
3.关节型机械臂的结构(2)
工字钢(GB706-88):
1、工字钢的型号与高度尺 寸h有关,如:10号工字钢 即指其高度尺寸为100mm。 2、其它参数如截面积、单 位长度的理论质量、截面静 力矩等可查相应的设计手册。 3、工字钢的长度按长度系 列购买。如:5~19m。
槽钢(GB707-88)
1、槽钢的型号与高度尺寸 h有关,如:10号槽钢即指 其高度尺为100mm。
各运动的实现:
腕部的旋转:
电机M5→减速器R5→链轮副C5→锥齿轮副G5→旋转运动n5 电机M4→减速器R4→链轮副C4→俯仰运动n4 电机M3→两级同步带传动 B3 、B3′→ 减速器 R3→肘关节摆动 n3 电机M2→同步带传动B2→减速器R2→肩关节摆动n2
腕部俯仰:
肘关节摆动:
4.极坐标型:
臂部由两个转动 副和一个移动副 组成。产生沿手 臂轴X的直线移 动,绕基座轴Y 的转动和绕关节 轴Z的摆动。其 手臂可作绕Z轴 的俯仰运动,能 抓取地面上的物 体。
三、典型机械臂结构
1.手臂直线运动机构
常见方式:
行程小时:采用油缸或汽缸直接驱动; 当行程较大时:可采用 油缸 或汽缸驱动 齿条传动的倍增机构或采用步进电机或 伺服电机驱动,并通过丝杆螺母来转换 为直线运动。 油缸驱动的手臂伸缩运动结构 电机驱动的丝杆螺母直线运动结构
机械臂结构设计原理

.
油缸驱动的手臂伸缩运动结构图例:
特点: 工作行程长,抓重大, 适合于抓举工件形状不 规则、有偏转力矩的场 合。
.
电机驱动丝杆螺母直线运动结构图例:
.
2.手臂的回转运动机构
常见方式:
常见的有齿轮传动机构,链轮传动机构,活塞及连 杆传动机构等。
曲柄滑块机构:
假设滑块是主动件,当滑块沿一定的导轨移动时, 可以推动曲柄做摆动或圆周运动。
.
3、导向性能好,定位精度高:
为防止手臂在直线运动中,沿运动轴 线发生相对转动,应设置导向装置。 同时要采用一定形式的缓冲措施。
.
4.重量轻、转动惯量小:
为提高机器人的运动速度,要尽量减 少臂部运动部分的重量,以减少整个 手臂对回转轴的转动惯量。
.
5.合理设计与腕部和机身的连接部位: 臂部的安装形式和位置不仅关系到机
.
3.关节型:
由动力型旋转关节 和前、下两臂组成。 关节型机器人以臂 部各相邻部件的相 对角位移为运动坐 标。动作灵活,所 占空间小,工作范 围大,能在狭窄空 间内饶过各种障碍 物。
.
4.极坐标型:
臂部由两个转动 副和一个移动副 组成。产生沿手 臂轴X的直线移 动,绕基座轴Y 的转动和绕关节 轴Z的摆动。其 手臂可作绕Z轴 的俯仰运动,能 抓取地面上的物 体。
机械臂结构
.
一、臂部设计的基本要求
.
1.承载能力足:
手臂是支承手腕的部件,设计时不仅 要考虑抓取物体的重量或携带工具的 重量,还要考虑运动时的动载荷及转 动惯性。
.
2.刚度高:
为了防止臂部在运动过程中产生过大 的变形,手臂的截面形状要合理选择。
工字型截面的弯曲刚度一般比圆截面
机械臂结构设计毕业设计

机械臂结构设计毕业设计械臂结构设计技术是一门广泛涉及到机械设备自动化控制的新兴技术,是当今工业自动化的重要组成部分。
机械臂结构设计的目的是使机械臂的使用灵活、牢固可靠。
本文主要从以下几方面综合考虑机械臂结构设计,探讨机械臂结构设计中所面临的各种困难,并对解决方法进行总结,为研究及应用提供参考。
一、机械臂结构设计基础1、机械臂几何结构设计:机械臂结构设计的基本要求是必须符合人体工程学,能够达到机械臂手臂与环境的完美结合,以及提供减小负荷的轴心线,以便维护机械臂的稳定性和寿命。
2、机械臂力学结构设计:此项结构设计旨在设计出一段能够满足应用要求的机械臂,以满足特定作业要求。
除此之外,还要考虑机械臂使用过程中的力学性能,如反作用力、平衡力等。
二、机械臂结构设计的主要考虑要素1、工作范围:在设计机械臂时,首先要考虑它的运动范围,以确定机械臂的转动角度范围和最大可实现的位移距离。
2、机械臂材料:机械臂的材料往往是决定机械臂结构设计的关键因素,材料选择要考虑机械臂的重量、刚度、耐仪器、耐磨性等,以及环境温度、湿度、抗腐蚀性等因素。
3、传动结构:传动结构是机械臂结构设计的重要组成部分,它指定了机械臂的驱动方式和驱动组件,如滑轮、缓冲器、皮带轮等。
4、控制系统:控制系统是机械臂的核心,它负责机械臂的数据采集、控制、故障诊断等,良好的控制系统能够保证机械臂的高效率运行。
三、机械臂结构设计中的局限性及解决方法1、载重能力:在设计机械臂时,需要考虑机械臂的负载能力,即它能够承受多大的负载,如果负载过大,会对机械臂的稳定性造成影响。
因此,机械臂设计应注意提高它的承载能力,比如通过增加滑轮数量、改变机械臂的材料、增加固定单元等方法来增强机械臂的稳定性。
2、运动平稳性:在机械臂的运动过程中,由于机械臂内部不同部件和传动结构的存在,会导致运动过程中出现抖动和不平稳现象,这将影响作业质量。
可以通过增加机械臂结构的刚度和强度,减小机械臂结构的振动,从而提高机械臂的运动平稳性。