基于向量的鲁棒分数阶PD控制器参数求解算法
鲁棒PID控制器稳定参数域研究的开题报告
鲁棒PID控制器稳定参数域研究的开题报告一、研究背景鲁棒PID控制器是一种能够解决不确定性和系统变化等问题的控制器,常被应用于实际工业控制中。
然而,鲁棒PID控制器中的参数往往需要经过繁琐的试验和优化才能得到合适的值,且这些参数在控制过程中可能会受到环境变化和干扰的影响,导致控制效果不佳。
因此,对于鲁棒PID控制器稳定参数域的研究成为了一个重要的课题。
确定鲁棒PID控制器的稳定参数域,能够帮助工程师在控制系统的实际应用中更快速、准确地确定合适的控制参数,提高系统的稳定性和控制效果。
二、研究目的本研究旨在通过对鲁棒PID控制器的原理及其在实际控制中的应用进行分析,探究其稳定参数域的确定方法,并对稳定参数域进行模型建立和实验验证,从而为鲁棒PID控制器在实际控制系统中的应用提供理论基础和参考依据。
三、预期研究内容1.对鲁棒PID控制器的原理和在实际控制中的应用进行分析和总结,考察不同参数对控制效果的影响。
2.分析鲁棒PID控制器的稳定性,从理论上探究鲁棒PID控制器稳定参数的选取原则,以及不同参数的联合选择策略。
3.建立鲁棒PID控制器稳定参数域的数学模型,对其进行仿真验证。
4.通过实验进行验证,对比不同参数组合对控制系统性能的影响,验证鲁棒PID控制器稳定参数域的有效性。
四、研究方法1.通过查阅文献和实验数据,分析鲁棒PID控制器的原理和在实际控制中的应用,总结鲁棒PID控制器的特点和参数选取的原则。
2.基于稳定性分析理论,对鲁棒PID控制器的稳定参数进行探究,分析不同参数的联合选择策略,得出稳定参数域的选取方法。
3.构建鲁棒PID控制器稳定参数的数学模型,利用MATLAB等仿真软件对其进行仿真验证。
4.进行实验验证,构建鲁棒PID控制器的控制系统,采用不同参数组合进行控制,对比其性能表现,验证鲁棒PID控制器稳定参数域的有效性。
五、研究意义本研究的成果将有助于:1.提高工程师对鲁棒PID控制器的了解和掌握,减少试错和优化成本,使其在实际工业控制中更加稳定和可靠。
基于线性矩阵不等式的磁悬浮轴承鲁棒最优PID控制器设计
基于线性矩阵不等式的磁悬浮轴承鲁棒最优PID控制器设计摘要:为解决高速磁悬浮轴承电主轴系统建模不确定性问题,建立了磁悬浮轴承的鲁棒控制模型。
把闭环系统同时满足渐进稳定、H∞鲁棒性和LQR指标的鲁棒最优多目标综合问题转化为线性矩阵不等式的优化问题;为了实现对PID控制参数的整定,建立增广系统矩阵,通过求解满足增广系统鲁棒最优问题的线性矩阵不等式,得到鲁棒最优PID控制器。
关键词:磁悬浮轴承;鲁棒最优控制;PID参数整定;线性矩阵不等式Design of Robust Optimal PID Controller for Magnetic Bearing via LMIApproachAbstract: To settle the modeling uncertainty of the high-speed magnetic bearing spindle system, a robust control model of magnetic bearing was established of. The closed-loop system may need to meet the asymptotic stability, H∞ robust and LQR indicators at the same time. The problem can be transformed into an integrated LMI optimization problem. Finally, according to the relationship of the augmented system state feedback controller with PID control parameters, the PID control parameters was tuned to make a robust optimal PID controller.Key words: Magnetic Bearing;Robust Optimal Control;PID parameter tuning;LMI0 引言目前的控制系统中,应用最广泛的一类控制策略是PID控制。
基于遗传算法的协调控制系统鲁棒PID参数寻优

基于遗传算法的协调控制系统鲁棒PID 参数寻优谢谢, 曾德良,刘吉臻,闫姝,刘继伟华北电力大学控制与计算机工程学院,北京市,中国,102206****************.cn【摘要】针对火电机组的机炉协调模型,提出了一种基于遗传算法的协调控制系统多变量鲁棒PID 参数寻优方法。
该方法以控制器的设定点跟踪性能为寻优目标,鲁棒性能作为约束惩罚条件,采用遗传算法对控制器参数进行寻优。
将该方法与鲁棒 控制器降阶后所得的PID 控制器进行比较,仿真结果表明,本文设计的控制器具有更好的负荷设定值跟踪性能,并且具有良好的鲁棒性。
【关键词】协调控制;鲁棒性能; PID 控制器; 遗传算法近年来,新能源发电规模化的接入电网,为保证电网的稳定运行,大型火电机组必须参与调峰,由于负荷波动频繁,这就要求机组的协调控制系统具有良好的鲁棒性和响应负荷指令的快速性。
火电机组的机炉协调系统是一个具有非线性、强耦合、时变的复杂多变量系统,许多先进的控制策略针对该系统进行了研究,如模糊多模型控制、鲁棒控制、预测控制等,但这些控制策略在现场难以实现。
而PID 控制器因其结构简单,易于实现,广泛应用于工业过程控制,在我国现有的热工过程控制中,90%的控制器仍是PID 控制器,因此,优化协调控制系统PID 控制器有很重要的现实意义。
文献[1] 将控制器的抗干扰性能作为寻优目标,利用遗传算法寻优协调控制系统的PID 参数,并对寻优所得的PID 控制器进行了鲁棒分析,但该文只对控制器的鲁棒性作了定性的分析;文献[2]提出了一种利用环路成形 的方法设计高阶鲁棒控制器,该方法是通过手动调整权值矩阵来获取合适的鲁棒控制器,需要具有一定的经验;并将鲁棒控制器降阶为多变量PID 控制器,PID 控制器将丧失鲁棒控制器的高频性能。
本文提出的基于遗传算法的协调控制系统多变量鲁棒PID 控制器将负荷指令的跟踪性能作为优化目标,并通过量化鲁棒性能,将其作为性能约束嵌入到遗传算法中。
自动化控制系统的鲁棒优化算法论文素材
自动化控制系统的鲁棒优化算法论文素材自动化控制系统是现代工业和科技领域中的重要组成部分。
鲁棒优化算法是自动化控制系统中的关键技术之一,它能够提高系统性能并增强其鲁棒性。
本文将提供关于自动化控制系统的鲁棒优化算法的论文素材,以供参考。
1. 引言自动化控制系统是指利用计算机和电子技术对工业过程进行监测、控制和优化的系统。
随着科技的不断发展,自动化控制系统在各个领域得到广泛应用,如工业生产、交通运输、能源管理等。
然而,由于外界环境的复杂性和工业过程的不确定性,自动化控制系统的稳定性和鲁棒性成为了研究的重点。
2. 鲁棒优化算法的概述鲁棒优化算法是一种针对系统不确定性和环境变化的优化方法。
它通过考虑系统模型的不确定性来有效地提高控制系统的性能和稳定性。
鲁棒优化算法的主要目标是在保证系统稳定性的前提下,最大化系统的性能指标。
3. 鲁棒性分析在鲁棒优化算法中,鲁棒性分析是一个关键的步骤。
它通过分析系统不确定性对系统性能的影响,确定系统的鲁棒性界限。
鲁棒性分析可以基于不确定性理论和鲁棒控制理论进行,为后续的优化算法提供基础。
4. 鲁棒优化算法的应用鲁棒优化算法在自动化控制系统中的应用非常广泛。
例如,鲁棒PID控制算法可以提高PID控制器对系统参数变化的适应性,增强系统的鲁棒性;鲁棒优化算法也可以应用于优化微分进化算法的参数设置,提高优化算法的收敛速度和优化性能。
5. 鲁棒优化算法的案例研究本节将介绍几个鲁棒优化算法在自动化控制系统中的案例研究。
例如,一种基于鲁棒优化算法的智能调度算法可以在多目标工业生产中实现资源的最优分配;另外,基于鲁棒优化算法的多智能体系统可以实现多个机器人之间的协同控制。
6. 结论本文简要介绍了自动化控制系统的鲁棒优化算法,并且提供了相关的论文素材供读者参考。
鲁棒优化算法在自动化控制系统中具有重要的应用价值,能够提高系统的鲁棒性和性能。
未来的研究可以进一步深入挖掘鲁棒优化算法在自动化控制系统中的潜力,为工业和科技领域的发展做出更大的贡献。
基于相角裕度与鲁棒性解析法设计分数阶PIλ控制器
基于相角裕度与鲁棒性解析法设计分数阶PIλ控制器高学利;吕广芝【摘要】介绍了一种基于期望相角裕度与提高系统鲁棒性的解析法设计分数阶PIλ控制器.首先,根据相角裕度的定义和提高系统的鲁棒性得到3个非线性方程组,并用图解法得到PIλ控制器的积分阶次λ;然后,由解析法得到控制器的比例增益kp和积分时间常数TI.比较传统Z-N法设计的常规PI控制器,仿真表明解析法得到分数阶PIλ控制器能得到期望的裕度并具有更好的鲁棒性.【期刊名称】《化工自动化及仪表》【年(卷),期】2014(041)003【总页数】4页(P243-245,343)【关键词】分数阶PIλ;控制器;相角裕度;解析【作者】高学利;吕广芝【作者单位】烟台万华化工设计院有限公司,山东烟台264006;烟台万华化工设计院有限公司,山东烟台264006【正文语种】中文【中图分类】TH86随着现代工业的发展和工业过程控制精度的不断提高,对工业过程数学模型的建立提出了更高的要求,传统的整数阶模型不能达到精度要求,因为实际的工业过程控制中有许多系统都是分数阶系统。
随着分数阶微积分理论的发展[1],人们建立分数阶微分方程来描述实际分数阶系统,这样可以使模型更加精确。
由于PID控制器具有结构简单、鲁棒性强及易于操作等特点,被广泛地应用于工业过程控制中。
对分数阶被控系统,用传统整数阶PID控制器来控制往往达不到理想的控制效果。
当系统参数变化时,整个闭环系统控制效果变差甚至会不稳定,所以,针对分数阶被控系统,科学家们提出了分数阶控制器。
由于分数阶PID控制器具有变量多、自由度高的特点,这给研究人员提供了更大的想象空间,并进行着不同方向的研究[2,3]。
目前,分数阶控制理论已在工业过程控制中,特别是在冶金、化工、电力、轻工及机械等行业得到了广泛应用。
笔者将介绍一种基于相角裕度与鲁棒性解析法设计的分数阶PIλ控制器。
通过仿真对比常规PI控制器,表明设计的分数阶PIλ控制器具有更好的鲁棒性。
参数自适应教与学优化分数阶PID控制器设计

参数自适应教与学优化分数阶PID控制器设计
近年来,越来越多的研究者开始探索分数阶控制的应用。
相较于传统的整数阶控制,分数阶控制不仅拥有更好的短时响应性能,而且具有更强的鲁棒性以及对非线性系统的适应性更强的优势。
随着控制领域的不断深入研究,分数阶PID控制器成为了越来越多应用的首选的控制器之一。
但是,不同的系统具有不同的参数需求,一般来说,分数阶PID控制器的参数是需要针对具体系统进行优化的。
因此,在实际应用中,分数阶PID控制器的性能往往会受到参数选择的影响。
为此,研究者提出了参数自适应教与学优化分数阶PID控制器设计的方法。
这种方法采用了基于神经网络的教与学算法,可以在在线实时优化的过程中,针对具体的系统参数情况,自适应的调整PID参数,并且对系统建模过程中的噪声和干扰有很好的适应性。
具体而言,该方法采用了一种基于神经网络的在线学习算法。
首先,根据系统的响应曲线数据,在线更新神经网络的权值和偏移值。
然后,该方法针对自适应教与学算法的特点,设计了一种基于系统误差和误差变化率的学习速率调整策略,使得算法更加稳定快速。
在实验研究中,对比传统的PID控制器设计和该方法设计的分数阶PID控制器,实验结果显示,该方法可以有效解决分数阶PID控制器参数选择的难题,而且在控制系统性能方面也有明显的提升。
其实验结果表明,该方法具有更好的鲁棒性和自适应性,可以适应更广泛的实际应用需求。
综上所述,参数自适应教与学优化分数阶PID控制器设计,具有很好的应用前景。
在实际的工程领域中,该方法可以适应不同的环境和系统参数要求,实现更加稳定快速的控制效果。
鲁棒pid参数整定技术及应用
鲁棒pid参数整定技术及应用1鲁棒PID参数调整技术PID(Proportional-Integral-Derivative)技术是一种用于控制动态系统行为的经典技术,它具有调节较快,收敛性差以及稳定性高等诸多特点。
PID控制器的精度和稳定性取决于参数整定的结果,而鲁棒PID参数调整是关于参数调整的重要技术,主要包括1)旋绕控制(RCE);2)基于试验的鲁棒PID参数调整技术(EPSAT);3)基于梯度变换的鲁棒PID参数整定技术(GRT);4)基于遗传算法的鲁棒PID参数整定技术(GAP)。
2旋绕控制(RCE)旋绕控制,即RCE,是一种基于贝叶斯反馈理论的PID参数整定技术,它主要针对系统模型未知而进行控制,其本质是对控制系统的控制动作进行旋转,以尝试提高内环控制器的性能,同时反馈适当的过程变量信号增强系统的鲁棒性。
3基于试验的鲁棒PID参数调整技术(EPSAT)基于试验的鲁棒PID参数调整技术(EPSAT)是一种基于试验的多步鲁棒PID参数调整技术,它主要通过测定多次不同条件下的工况量进行优化,找到一种能够鲁棒地满足各种条件下的高性能的参数配置。
其特点是针对不同情况下的特征和误差曲线调整参数,使用多步调试的方式,确保参数的最优配置。
4基于梯度变换的鲁棒PID参数整定技术(GRT)基于梯度变换的鲁棒PID参数整定技术(GRT)是一种利用系统不确定性(Uncertainty)概念,结合移相(phase shift)和移幅(amplitude shift)性能指标将不确定性表征为参数的变化来整定参数的技术,它既可以保证系统的快速收敛抗干扰性能,又能够较好地保持系统的鲁棒性。
这种技术有助于减少人工参数试验次数,简化传统参数调整过程,从而提高传统PID参数调整算法的效率。
5基于遗传算法的鲁棒PID参数整定技术(GAP)基于遗传算法的鲁棒PID参数整定技术(GAP)是一种基于遗传算法和粒子群算法求解器的鲁棒PID参数整定技术,利用模拟测试的试验点,将整个控制器的参数空间分解为多个子空间,对每个子空间分别确定其最优参数,然后将每个子空间的参数融合,从而求得比传统方法更优的全局最优参数。
面向鲁棒运动控制系统的分数阶PID控制器设计自整定及实验研究博士学位论文
博士学位论文面向鲁棒运动控制系统的分数阶PID 控制器设计、自整定及实验研究Fractional Order PID controller Synthesis, Auto-tuning and Experiment Studies for Robust Motion Control SystemsbyYongshun JinB. E. (Hunan University) 2004M. S. (Hunan University) 2007A dissertation submitted in partial fulffilement of theRequirements for the degree ofDoctor of EngineeringinElectrical Engineeringto theGraduate SchoolofHunan UniversitySupervisorProfessor Yao JiangangNovember, 2010湖南大学学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权湖南大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密□,在年解密后适用本授权书。
2、不保密 。
(请在以上相应方框内打“√”)作者签名:日期:年月日导师签名:日期:年月日摘要随着分数阶微积分理论的发展,越来越多的人关注这一领域的实际应用问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 44 卷 第*期 2014 年*月
吉 林 大 学 学 报(工学版) Journal of Jilin University (Engineering and Technology Edition)
2
Kp
Re
基于向量的控制器参数求解步骤
Kd
Ki
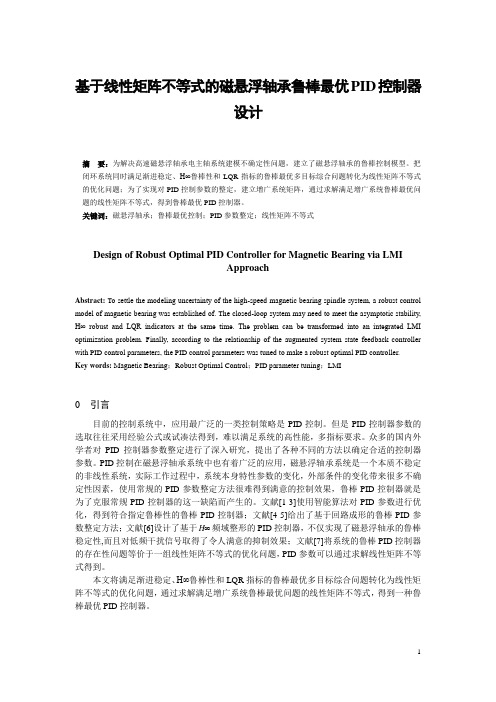
C j Kp
K i Kd j j
图 1 整数阶向量模型 Fig.1 The IOPID controller vector model
增益鲁棒性控制器参数求解是根据在复平面性 能指标向量 G ,去求得一个校正向量 L ,使其校正 被控对象向量 P 达到要求的性能指标向量 G ,即 L P G。然后用控制器向量 C 去逼近校正向量 L ,就可以得到控制器参数方程。 基于向量的控制器参数求解步骤如下: 步骤 1:写出被控对象的向量形式及角速度。
(School of Electronic and Information Engineering, Changchun University of Science and Technology, Changchun 130022, China)
Abstract: To solve the problem that the parameter calculation procedure of fractional order controllers is complicated when the fractional order controllers are robust to the loop gain variation, a new algorithm for simplifying fractional order controller parameters calculation procedure based on phasor method has been proposed. In our approach, the phasor models of fractional order controllers in the phase plane are built in advance, and geometrical relationship is used to solve the fractional order controller parameters in the phase plane. In this paper, through an example of fractional order proportional differential (FOPD) controller, the parameter calculation procedure of the robust FOPD controllers based on phasor method is discussed in detail. It is proved that the calculated controller parameters based on phasor method is uniqueness. Besides, the proposed algorithm is programmed in MATLAB. According to MATLAB programs of the FOPD controller parameters solution algorithm, the FOPD controllers are respectively designed for the systems compensation following the different given phase margins, different given gain crossover frequency and different given controlled plants. This study result shows that not only the parameter calculation procedure of fractional order controllers is simplified and the amount of calculation is reduced, but also the calculated controller parameters is unique and valid. Key words:artificial intelligence; control theory; robust fractional order controller; fractional order proportional differential (FOPD); parameter calculation; phasor
c
d(Arg[G( j)]) 0 (8) d c 即要求性能指标向量在截止频率 c 的角速度为 0。 步骤 3:根据 L P G ,求得校正向量 L 。
根据稳定性性能指标向量(7)和被控对象向量(5), 由 LP G 可求得校正向量
L jc A
2
c
P
(6)
Kd
步骤 2: 根据系统要求, 写出性能指标向量 G 可以得到稳定性性能指标向量为:
稳定性性能指标: 开环系统在 c 处的相位裕度 m 。
j。
(7)
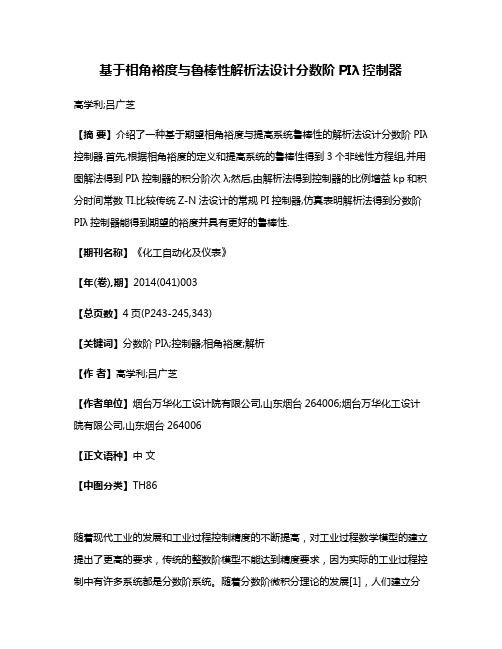
Kp
Re
图 3 FOPD 控制器向量 Fig.3 FOPD controller vector model
偶数页页码
吉 林 大 学 学 报(工 学 版)
第 44 卷
在电机控制系统中常存在有效负荷的惯性参数 不稳定或者其在某一个小的范围内变动,导致系统 开环增益变化的问题[1]。 陈阳泉教授[2]等人在稳定性 裕度基础上增加增益鲁棒性条件,提出了鲁棒分数 阶控制器设计方法。即要求系统开环增益变化时, 系统阶跃响应超调量几乎不变,其频域特性要求伯 德图相位在 c (截止频率)周围是处于平坦的。在文 献[1-13] 中陈阳泉教授等人证实了增益鲁棒性分数 阶控制器既能满足系统稳定,又能满足系统开环增 益鲁棒性。 然而, 文献[9-13]中增益鲁棒性分数阶控制器参 数求解过程非常复杂, 计算量大。 对比文献[12]和[13] 增益鲁棒性分数阶控制器参数求解过程,对于不同 的被控对象,增益鲁棒性分数阶控制器参数求解方 程是不同的,难以程序化求解增益鲁棒性分数阶控 制器参数。 本文提出了一种基于向量的增益鲁棒性分数阶 控制器参数求解简化算法,这种方法是根据映射原 理预先在复平面内建立控制器向量模型,进而利用 复平面内几何关系建立方程求解控制器参数。本文 首先在第1节介绍了复平面内控制器向量模型, 并在 第2节给出了基于向量的控制器参数求解步骤。其 次,在第3节采用向量方法对FOPD控制器进行参数 求解,在第4节证明了求解的参数唯一性。然后,在 第5节编写了FOPD 控制器参数求解算法程序,第6 节利用参数求解算法程序求解在不同相位裕度,不 同穿越频率以及不同被控对象条件下的增益鲁棒性 FOPD控制器参数,并进行了仿真验证。最后,第7 节对全文做出总结。
G( jc) 1m 180
令 m Arg P
鲁棒性性能指标: 为保证系统对增益变化的鲁棒性, 增加增益变化的鲁棒性条件,即要求系统开环传递 , 函数的相位在截止频率 c 附近是平坦的[1 2,8-13]。
Lj c A 。
Im
1 即 jc 180 和 A P j ,
第*期
王春阳,等:基于向量的鲁棒分数阶 PD 控制器参数求解算法
奇数页页码
被控对象为 P(s) 写成向量形式为:
P( j) P( j) P( j)
d Arg P j d
(5)
Im
被控对象的角速度:
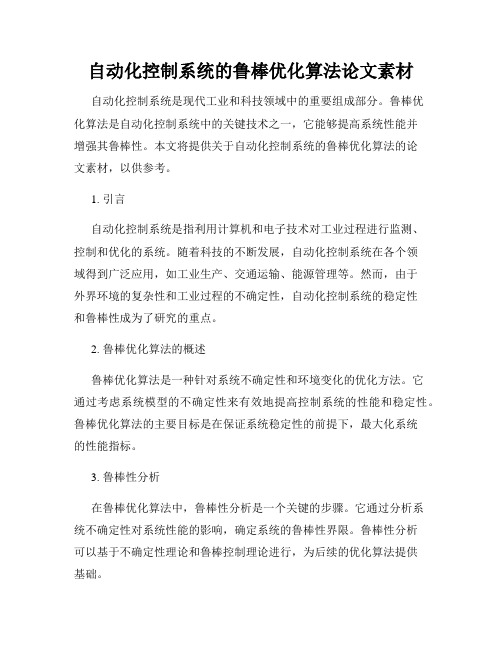
C j K p K d j
C(s) Kp
Ki Kds s K C j Kp i Kd j j
Im
Kd
2
(1) (2)
(2) 分数阶控制器向量模型:
K p
Ki
2
ReLeabharlann C j K p
j
Ki
K d j
u
图 2 分数阶向量模型
K C(s) Kp i Kd su (0 ,u 2) s K C j Kp i Kd ju (0 ,u 2) j
Robust fractional order proportional differential controller parameters algorithm based on phasor
Wang Chun-yang,CAI Nian-chun,LI Ming-qiu,LIU Xue-lian
2
1 P j 180 (9) m c P jc 又根据鲁棒性性能指标(8),由 L P G 可知在频 L jc
Vol.44 No.* *. 2014
基于向量的鲁棒分数阶 PD 控制器参数求解算法
王春阳,蔡年春,李明秋,刘雪莲
(长春理工大学 电子信息工程学院,长春 130022)
摘 要: 针对系统开环增益鲁棒性分数阶控制器参数求解复杂问题,提出了一种基于向量的鲁棒分数阶控制器参数 求解简化算法。该方法预先在相平面内建立控制器向量模型,再利用相平面内几何关系求解控制器参数。本文以 分数阶比例微分(FOPD)控制器为例,详细的论述了基于向量的鲁棒 FOPD 控制器参数求解过程,证明了该方法 求解的控制器参数具有唯一性, 并编写了基于 MATLAB 环境下 FOPD 控制器参数求解算法程序, 实现了面向不同 相位裕度、不同穿越频率以及不同被控对象的鲁棒 FOPD 控制器系统校正。结果表明,基于向量的鲁棒 FOPD 控 制器参数求解算法不仅简化了控制器参数求解过程减少了计算量,而且求得的控制器参数唯一且有效。 关键词:人工智能;控制理论;鲁棒分数阶控制器;分数阶比例微分;参数求解;向量 中图分类号:TP13 文献标志码:A