多圈光电轴角编码器在直线位移测量中的应用_张世轶
多圈编码器应用场景

多圈编码器应用场景多圈编码器是一种常用的旋转式位置传感器,它可以测量旋转物体的角度和方向,并将这些信息转换成数字信号输出。
多圈编码器广泛应用于工业自动化、机械加工、机器人控制、医疗设备等领域。
下面将介绍多圈编码器在不同应用场景中的具体应用。
1. 工业自动化在工业自动化中,多圈编码器通常被用来测量旋转电机或马达的角度和速度。
通过与PLC(可编程逻辑控制器)或DCS(分布式控制系统)相连,可以实现精确的运动控制和定位功能。
例如,在食品加工厂中,多圈编码器可以用于控制输送带上食品包装的位置和速度,以确保精确而高效的包装过程。
2. 机械加工在机械加工领域,多圈编码器通常被用来测量刀具或工件的位置和方向。
通过与数控系统相连,可以实现高精度的加工过程。
例如,在车床上使用多圈编码器可以实现复杂零件的加工,并且保证每个零件都是完全一致的。
3. 机器人控制在机器人控制领域,多圈编码器通常被用来测量机器人末端执行器的位置和方向。
通过与控制系统相连,可以实现精确的运动轨迹规划和执行。
例如,在汽车工厂中,多圈编码器可以用于控制机械臂上喷漆喷枪的位置和角度,以确保每个汽车都能得到完美的喷漆效果。
4. 医疗设备在医疗设备领域,多圈编码器通常被用来测量手术机械臂或医疗设备的位置和方向。
通过与控制系统相连,可以实现高精度和安全性。
例如,在手术室中使用多圈编码器可以帮助医生准确地定位手术工具,并且避免对患者造成不必要的伤害。
总之,多圈编码器是一种非常重要的位置传感器,在各种应用场景中发挥着重要作用。
无论是在工业自动化、机械加工、机器人控制还是医疗设备等领域,多圈编码器都能够提供精确而可靠的测量结果,为生产和服务提供了有力的支持。
通过基于光电编码器的数字电路实现直线位移高精度测量
通过基于光电编码器的数字电路实现直线位移高精度测量的一种方法王锋山东电力建设第二工程公司电仪工程处摘要:本文主要介绍了用光电编码器实现大直线位移高精度测量的一种方法。
主要是通过数字电路实现。
数字电路首先对光电编码器输出信号进行辨向,通过符号及加减控制电路实现对计数器的控制,倍频电路对光电编码器的输出信号进行倍频,起到提高测量的精度和消除信号抖动作用,倍频后的的信号输入计数器计数,并通过LED显示器显示测量结果。
关键词:直线位移,光电编码器,数字电路1、光电编码器在位移测量中的应用原理光电编码器是一种高精度的角位移传感器。
因其具有直接输出数字量、响应快、精度高、抗干扰能力强、分辨率高、输出稳定等特点。
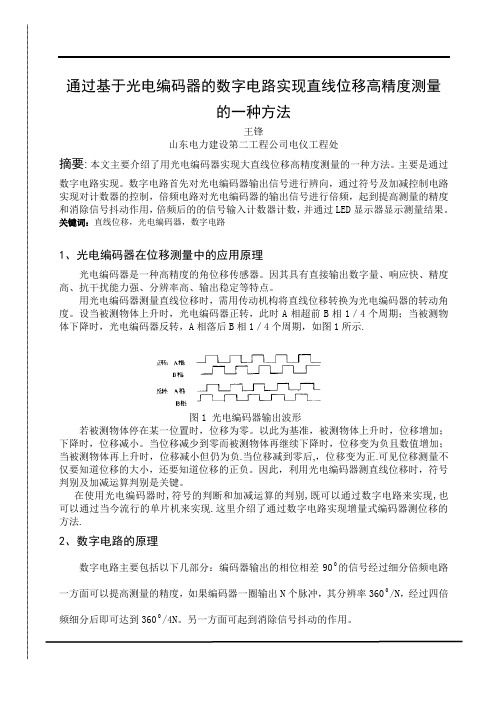
用光电编码器测量直线位移时,需用传动机构将直线位移转换为光电编码器的转动角度。
设当被测物体上升时,光电编码器正转,此时A相超前B相1/4个周期;当被测物体下降时,光电编码器反转,A相落后B相1/4个周期,如图1所示.图1 光电编码器输出波形若被测物体停在某一位置时,位移为零。
以此为基准,被测物体上升时,位移增加;下降时,位移减小。
当位移减少到零而被测物体再继续下降时,位移变为负且数值增加;当被测物体再上升时,位移减小但仍为负.当位移减到零后,,位移变为正.可见位移测量不仅要知道位移的大小,还要知道位移的正负。
因此,利用光电编码器测直线位移时,符号判别及加减运算判别是关键。
在使用光电编码器时,符号的判断和加减运算的判别,既可以通过数字电路来实现,也可以通过当今流行的单片机来实现.这里介绍了通过数字电路实现增量式编码器测位移的方法.2、数字电路的原理数字电路主要包括以下几部分:编码器输出的相位相差900的信号经过细分倍频电路一方面可以提高测量的精度,如果编码器一圈输出N个脉冲,其分辨率3600/N,经过四倍频细分后即可达到3600/4N。
另一方面可起到消除信号抖动的作用。
细分后信号一路形成计数信号接入计数器,另一信号警方向判别控制电路,形成方向和加减信号,接入计数器,计数结果及正负经驱动电路由LED 显示。
《传感器技术与应用》教学课件6-4 光电编码器用于数控机床的位移检测

*任务提出:
传
在各种车辆的运转、机械设备的运行
感 中,都需要对转速进行检测。
器
技
术
与
应
用
光电编码器用于数控机床的位移检测
传
资讯
感
光电编码器也是一种光电传感器,只是它将
器 光源、透镜、随轴旋转的码盘、窄缝和光敏元件
技 组成在一起。当码盘转动时,光敏元件接收到一
术 串亮暗相间的光线,由后续电路转换为一串脉冲,
增量式编码器输出波形图
光电编码器用于数控机床的位移检测
传 感 器 技 术 与 应 用
增量式编码器
光电编码器用于数控机床的位移检测
绝对式编码器工作原理:
传
光源通过透镜照射到
感 码盘上,当码盘随轴转动
器 时,通过亮区(透光窄缝)
技 的光线由光敏元件接收,
术 与 应 用
输出为“1”;而在暗区, 输出为“0”。码盘旋至不 同的位置时,一组光敏元 件输出信号的组合反映了
传
高速旋转测速
感
器
技 术 与
高速旋转测速一般采用在给定的时 间间隔T内对编码器的输出脉冲进行计
应 数,这种方法测量的是平均速度,又称
用 为M法测速。它的原理框图如下图(a)
所示,输出脉冲示意图如下图(b)所
示。
光电编码器用于数控机床的位移检测
传 感 器 技 术 与 应 用
(a)
(b)
图 高速旋转测速(M法测速)
传 感 器 技 术 与 应 用
各种光电编码器
光电编码器用于数控机床的位ห้องสมุดไป่ตู้检测
增量式编码器
传
工作原理:光电编码器的光栏板 外圈上A、B两个狭缝的间距是
光电编码器原理及应用

光电编码器原理及应用光电编码器是一种将机械运动转换为数字信号的装置。
它由光源、光栅、光电传感器和信号处理电路组成。
光源发出光线经过光栅产生不均匀间隔的光斑;光电传感器感受到光栅反射的光斑,并转换为光电信号;信号处理电路则将光电信号转换为数字信号输出。
光电编码器的工作原理是通过测量光栅上光斑的移动来计算机械运动的位移。
当机械部件运动时,光斑也会相应地移动。
光电传感器感知到不同位置的光斑,并产生相应的光电信号。
信号处理电路会将光电信号转换为数字信号,以便计算机进行处理和分析。
根据光电编码器的设计,可以实现高精度的位置测量,而且由于采用了光电传感器,不会受到摩擦和磨损的影响,提高了测量的精度和可靠性。
1.位置测量:光电编码器可以精确测量机械部件的位置,并将位置信息反馈给控制系统。
例如,在工业机械中,可以使用光电编码器测量转动轴的角度或线性导轨的位置。
这可以实现精确的定位和控制。
2.运动控制:光电编码器可以用于测量机械部件的速度和加速度,并实现闭环控制。
通过实时监测位置、速度和加速度等参数,控制系统可以对运动进行精确的调整和控制,以满足特定的运动要求。
3.位置反馈:光电编码器可以用作位置反馈装置,使控制系统能够知道机械部件的准确位置。
通过与期望位置进行比较,控制系统可以及时调整和纠正位置偏差。
4.角度测量:光电编码器可以用于测量旋转轴的角度。
在机械加工、自动化控制和机器人等领域,光电编码器广泛应用于角度测量和定位。
5.自动校正:光电编码器还可以用于自动校正机械设备的位置或角度。
通过比较期望值和测量值,控制系统可以自动调整和校正机械设备,以保持其准确性和稳定性。
总之,光电编码器是一种重要的测量和控制装置,广泛应用于各种机械设备和工业自动化系统中。
它能够提供精确的位置测量和运动控制,为机械运动的精确性、稳定性和可靠性提供了重要支持。
随着科技的发展和创新,光电编码器的应用领域将会更加广阔,有望实现更高的测量精度和控制效果。
光电轴角编码器的原理及应用_李葆勇

光电轴角编码器的原理及应用_李葆勇光电轴角编码器由透明码盘和光电检测装置组成。
透明码盘上有一组点阵状的透明条纹,光电检测装置上分别配有发送光电器和接收光电器。
当传动装置使得透明码盘旋转时,透明条纹会不断遮挡和透过光电检测装置中的光线,从而产生电信号。
接收光电器接收到的光信号会通过解码器进行处理,得到准确的角度信息。
1.机械制造:光电轴角编码器可以用于测量机械设备的旋转角度,如机床、数控机床、机器人等,实现精确的运动控制和定位。
2.自动化控制:光电轴角编码器可用于工业自动化领域,如流水线控制、机械臂控制等,实现精确的位置、速度和角度测量。
3.航空航天:光电轴角编码器在航空航天领域也有着重要的应用,如飞机航向控制、航空器的姿态控制等,确保飞行的精确性和安全性。
4.仪器仪表:光电轴角编码器可用于测量仪器仪表中的旋转或转角,如测角仪、显微镜、望远镜等,实现高精度的测量和观测。
5.医疗设备:光电轴角编码器在医疗设备中也有广泛应用,如手术机器人、骨科导航系统等,能够帮助医生实现精确的手术操作和导航。
总之,光电轴角编码器作为一种精密的角度测量传感器,广泛应用于机械制造、自动化控制、航空航天、仪器仪表、医疗设备等领域,提高了产品的质量和生产效率,促进了科技的发展。
光电编码器的原理及应用
光电编码器的原理及应用
光电编码器是一种用于测量角度的测量仪器,可以把一个转动角度转
换成实际度量值。
它把一个回转角度的变化转换成一个具有连续性的数字
脉冲,它包括一个旋转的轮轴,带有光学编码器的特定的探头,以及一个
电子装置,用于记录探头的位置并输出一个脉冲序列。
光电编码器以诸如电子排队机、汽车娱乐设备等自动设备的控制和定
位等方式被广泛使用。
它的最主要功能是检测所有移动的部分,例如舵机、轴承、机床,以及其他转动设备,以确定应用程序的位置。
它们还可以用
于检测物体的变化和测量其旋转角度,或用于监控和控制系统的简单旋转
设备,如伺服转盘、转子、旋转轴等。
一种典型的光电编码器由一个线性光电编码器和一个电子处理部件组成,其中线性光电编码器包括一个固定的光源和一个可变的探头。
光源可
以是激光系统、LED系统或其他设备,其精度可以达到1/1000倍。
探头
可以是电子芯片,如玻璃探头、石英探头等。
当光源照射探头时,可以产
生一个电流脉冲,该脉冲可以被电子处理器用于记录特定角度的位置,经
过必要的转换后,可以将芯片探测到的角度变化输出为实际角度值。
尽管有些简单的产品只包括光源和探头。
智能传感技术-光电编码器的应用

光电编码器的应用 2.在伺服电动机中的应用
➢ 转速测量 ➢ 转子磁极位置测量 ➢ 角位移测量
光电编码器的应用 3.加工定位
1—绝对式编码器 2—电动机 3—转轴 4—转盘 5—工件 6—刀具
设工位1刚已完成加工,要使处于 工位2上的工件转到加工点等待钻加 工,计算机就控制电动机,使带轮带 动转盘顺时针旋转。与此同时,绝对 式角编码器(假设为4码道)输出的 编码不断变化。当输出从0000变为 0010时,表示转盘已将工位2转到图 中的加工点,伺服电动机停转,驱动 器使伺服电动机保持在该位置。
数字式传感器
光电编码器的 应用
光电编码器的应用 1.数字测速
M法测速
数字测速
增量式编码器产生的 脉冲与转动的位移相对应, 测量出输出脉冲的周期或频 率,经计算后即可得到被测 对象的速度。
T法测速
光电编码器的应用 1字测速
T法测速
光电编码器的应用
2.在伺服电动机中的应用
光电旋转编码器在角度测量中的应用

光电旋转编码器在角度测量中的应用光电旋转编码器(Optical Rotary Encoder)是一种用于测量旋转角度的装置,它通过光学原理和编码技术,将旋转轴的位置转化为电信号输出。
光电旋转编码器广泛应用于各种领域,包括机械制造、自动化控制、测量仪器等。
本文将从基本原理、工作原理、应用领域等多个方面对光电旋转编码器在角度测量中的应用进行深入探讨。
一、基本原理光电旋转编码器的基本原理是通过固定在旋转轴上的圆盘或转子上的光栅条纹或刻度尺,利用透射光或反射光的原理,通过光电传感器接收器件对光栅条纹进行读取,进而转化为电信号。
通常,光源和光电传感器会固定在旋转编码器的固定部分上,而光栅条纹或刻度尺则固定在旋转部分上。
光电旋转编码器的输出信号通常为脉冲信号,通过测量脉冲的数量和方向,可以计算出旋转轴的位置和速度。
二、工作原理光电旋转编码器的工作原理可以简单分为两种类型:增量式和绝对式。
1. 增量式编码器增量式编码器是通过测量旋转轴的位置的变化量来计算旋转角度的,它输出的信号类似于脉冲。
增量式编码器通常由一对光栅或刻度尺组成,一对光栅或刻度尺之间的间隔可以表示精度。
当旋转轴转动时,光电传感器会检测到光栅或刻度尺上的条纹变化,输出相应的脉冲信号。
通过对脉冲信号进行计数和分析,可以测量出旋转轴的角度。
然而,增量式编码器的主要限制是无法恢复到绝对位置。
2. 绝对式编码器绝对式编码器的工作原理类似于增量式编码器,但它的输出信号可以表示旋转轴的绝对位置。
绝对式编码器通常由多个位域和编码器组成,每个编码器都有唯一的编码规则和位域。
当旋转轴转动时,光电传感器会读取每个编码器的位域信号,并将其转换为旋转轴的角度。
绝对式编码器的优势在于可以在任何时候恢复到绝对位置,不需要再进行原点复位。
三、应用领域光电旋转编码器在角度测量中的应用非常广泛,以下列举了一些常见的应用领域。
1. 机械制造在机械制造领域中,光电旋转编码器被广泛应用于机床、机器人、印刷设备、3D 打印机等设备中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第13卷 增刊 2005年11月 光学精密工程 O ptics and P recision Eng ineering V ol.13Supp. N ov.2005 收稿日期:2005-07-20;修订日期:2005-09-15.文章编号 1004-924X (2005)增-0076-05多圈光电轴角编码器在直线位移测量中的应用张世轶1,2,韩旭东1,艾 华1(1.中国科学院长春光学精密机械与物理研究所,吉林长春130033;2.中国科学院研究生院,北京100039)摘要:多圈光电轴角编码器是一种适用于大量程轴角位移精密测量的光电数字测角仪,其测量范围可超过整周(360°)的几百倍,甚至上千倍。
利用多圈光电轴角编码器具有分辨力高、精度高、体积小、量程大以及数字量输出等优点,设计了由高精度齿轮同步带传动机构与16位多圈编码器组合而成的直线位移测量系统,并对系统的测长精度进行了检定。
实验结果表明,修正后的系统测长误差低于0.065mm ,可满足中低精度的工业测量要求。
关 键 词:多圈编码器;轴角编码器;直线位移;长度测量中图分类号:T N762 文献标识码:AApplication of multi -turn photoelectric rotaryencoder in length measurementZHANG Shi -yi 1,2,HA N Xu -dong 1,AI H ua 1(1.Changchun Institute o f Optics ,Fine Mechanics and P hy sics ,Chinese Academ y o f S ciences ,Changchun 130033,China ;2.Graduate S chool ,Chinese Academy o f Sciences ,Beijing 100039,China )A bstract :As m odern dig ital pho to sensor ,m ulti -turn photoelectric ro tary encoder has m uch technical superiority in measuring mechanical shaft ang le displacement such as higher precisio n ,higher resolu -tion ,larger m easuring scale (far mo re than 360°)and digital output.A new long -distance linear dis -placement m easuring sy stem is designed by utilizing one 16-bit multi -turn optical enco der and the mechanism comprised the gearing w heels and the co nveyo r belt.The ex perimental results prove that the cor rected sy stemic errors can be diminished in less than 0.065mm and the industrial measurem ent with m edium and lo w accuracy requirements can be m et entirely.Key words :ro tary encoder ;multi -turn encoder ;linear displacement ;leng th measurem ent1 引 言 光电轴角编码器,亦称光电角位置传感器,是集光、机、电为一体的数字测角装置,由于它具有高精度、高分辨力、高频响,并且体积小、重量轻、可实现数字量输出等优点,被广泛应用于工业、军事、航空、机器人等各领域的自动化精密角位置测量系统中[1]。
多圈光电轴角编码器(以下简称多圈编码器),是在常规光电轴角编码器的基础上研制和开发的,是国内近几年出现的新型光电轴角编码器。
常规的光电轴角编码器只有1个码盘(主光栅),只能测量1个圆周内(0°<θ≤360°)的绝对角度值;而多圈编码器具有2个以上的码盘,在记录单圈信息的同时,还能记录旋转轴转过的总圈数,因此可实现大量程(超过360°)轴角绝对测量。
由于多圈编码器只能直接记录角度值,而为了满足大行程直线位移测量要求,采用机械手段将多圈编码器与高精度齿轮同步带传动机构组合并用,可将长度测量化为角度测量,既能实现高精度测量,又兼顾大量程计量要求,在工业精密测量中具有一定的实用价值。
2 多圈编码器工作原理2.1 基本结构多圈编码器与常规编码器的主体结构是相同的,其内部主要由光源、准直系统、光栅付(玻璃码盘和狭缝)、光电接收器、电子处理电路、轴系及相应的机械部件等组成,外部有金属保护壳和数据线接口,能直接与计算机或数显设备连接,可以实现动态实时测量[1-2]。
图1所示是编码器的基本结构。
码盘上有n圈同心码道(见图2),码道上均匀分布着“透光”和“不透光”的区域,作为输入信号的“0”、“1”,码盘随主轴同步旋转,其他组件相对轴系不动。
当主轴任意转过微小的位移时,由于码盘与狭缝之间的相对运动,会在光栅付的后面形成明暗交错变化的莫尔条纹[3-4],光电接收器将这一变化的光信号转换成电信号,再经电子处理后以二进制代码的形式输出(见图3)。
由于莫尔条纹对光栅栅距有放大作用[5],而且每个角度都唯一对应一组二进制代码,因此利用光电轴角编码器可实现轴角绝对位置的精密测量。
图1 编码器基本结构图F ig.1 Basic structure of encode r图2 8位绝对式码盘Fig.2 8-bit absolute co de disk图3 输出二进制代码Fig.3 Bina ry co de output2.2 多圈编码器构造特点多圈编码器在常规光电轴角编码器的基础上77增刊 张世轶,等:多圈光电轴角编码器在直线位移测量中的应用做了技术上的改进,是为实现大量程角度测量而研制开发的一种新型光电编码器,目前世界上较为先进的多圈编码器,其最大量程可达到单圈的几千倍。
多圈编码器有2个绝对式码盘,一个用于输出单周内绝对角度信息,一个用于记录主轴转过的圈数,调速齿轮组(见图4)以恒定的传动比调节2个码盘的转速,2组信息(均为二进制代码)并行输出作为记录当前轴角的绝对位置。
本系统采用的是由中国科学院长春光学精密机械与物理研究所研制的最大量程为8圈的16位多圈编码器,其中3位用于圈数计数,另13位用于单周信息计数,其单周最小分辨力为158.2′。
图4 调速齿轮组Fig.4 Gea r bank contro lling speed of tw o disks3 直线位移测量系统 系统采用齿轮同步带传动机构与16位多圈编码器组合测量方案(如图5所示)。
传动机构包括齿轮、同步带和各种固定及连接部件,通过轮齿和带齿的有效啮合来传递负载的运动位移[6],同步带选取温度特性好和弹性变形小的材质。
负载(被测件)与同步带通过连接板固联,确保同步带与负载运动的同步性,同时还要保证同步带与负载移动的路径(导轨)平行,在其中1个齿轮的轴系上安装16位多圈编码器。
当负载每向前或向后移动一微小的位移,同步带就跟着移动一相同的位移量,编码器随齿轮轴的转动相应地记录一角位移。
由于运动负载的直线位移量与编码器记录的角度值是一一对应的,因此通过测量角度可间接实现直线位移测量的目的。
在理想状况下,测长系统的分辨力γl 由公式图5 直线测量系统F ig.5 Leng th measurement sy stemγl =γa (d +h )决定,γa 为编码器单圈最小分辨力,d 为齿轮外径,h 为同步带厚度。
可见,要想提高测长系统的精度除了选取高位数的编码器外,还要根据具体的情况尽量选用小尺寸的齿轮,但不能降低齿轮和同步带啮合传动的稳定性和可靠性要求。
4 精度检定4.1 试验结果为检验系统的测长精度,试验采用德国H ei -denhain 绝对式长光栅尺作为标尺,来检验该方案的准确性。
在接近200m m 的行程中,共选取20个测量点,计算出每点的测量误差(详见表1,图像见图6),应用贝塞尔公式求得均方差为σ=0.11m m ,应用最小二乘法对测量误差线性拟合[7],得出x i =-0.0131+0.0007L i 。
表1 测量误差表T ab.1 Sy stemic measuring erro r sL i /mm x i /mm L i /mm x i /mm 0.06-0.06100.750.079.88-0.05109.820.1320.72-0.12120.380.0930.18-0.08129.950.1440.80-0.06139.960.1749.92-0.02150.110.1759.91-0.02160.460.1970.38 0.01170.250.1579.980180.450.1889.86189.980.1878 光学 精密工程 第13卷图6 修正前系统误差曲线Fig.6 Curve o f sy stemic err or s w ithout being co rreceed4.2 误差修正由于测量过程存在系统误差,随着测量距离的增大,表现为行程越大误差越大,因此需对测量结果进行误差修正。
令X i 为修正后的误差,则X i =x i -(-0.0131+0.0007L i ),修正后的随机误差见表2,图像见图7。
表2 修正后的随机误差表T ab.2 Rando m err or s afer being cor rectedL i /mm X i /mm L i /mm X i /mm 0.060.047100.750.0139.880.044109.820.06620.720.121120.380.01930.180.088129.950.06240.800.075139.960.08549.920.042150.110.07859.910.049160.460.09170.380.026170.250.04479.980.043180.450.06789.860.050189.980.060图7 修正后随机误差曲线Fig.7 Curve o f rando m err or s afer being cor rected 应用贝塞尔公式,求得修正后的均方差为:σx =0.064mm <0.065mm 。